Você também pode gostar
- When Was World Tsunami Awareness Day Observed?Documento1 páginaWhen Was World Tsunami Awareness Day Observed?ajaykrishna_99Ainda não há avaliações
- When Was National Press Day Celebrated?Documento1 páginaWhen Was National Press Day Celebrated?ajaykrishna_99Ainda não há avaliações
- Which City Was Ranked As The Most Congested City?Documento1 páginaWhich City Was Ranked As The Most Congested City?ajaykrishna_99Ainda não há avaliações
- (dzdz…^Èl Bàæý‡ ¨¯Ø™Èlþð) L… Gç³#Μyýl$ °Æý‡Óíßæýë¢Æý‡$?Documento1 página(dzdz…^Èl Bàæý‡ ¨¯Ø™Èlþð) L… Gç³#Μyýl$ °Æý‡Óíßæýë¢Æý‡$?ajaykrishna_99Ainda não há avaliações
- WeldingDocumento14 páginasWeldingmomenzi100% (1)
- Who Became The First Female President of Ethiopia?Documento1 páginaWho Became The First Female President of Ethiopia?ajaykrishna_99Ainda não há avaliações
- Tl-wr740n 741nd User GuideDocumento113 páginasTl-wr740n 741nd User GuidereguarasAinda não há avaliações
- Daily Test 21Documento6 páginasDaily Test 21ajaykrishna_99100% (1)
- Fluid Mechanics and Machinery 2E (Kothandaraman & Rudramoorthy) - 15 PDFDocumento1 páginaFluid Mechanics and Machinery 2E (Kothandaraman & Rudramoorthy) - 15 PDFajaykrishna_99Ainda não há avaliações
- Welding Electrode Classifications 123Documento2 páginasWelding Electrode Classifications 123Unnikrishnan RajanAinda não há avaliações
- Quiz 5Documento3 páginasQuiz 5ajaykrishna_99Ainda não há avaliações
- PopulationDocumento105 páginasPopulationPrasanna KumarAinda não há avaliações
- UNIVERSITY OF CALICUT SCHOOL OF DISTANCE EDUCATION BA Economics, Sociology & English (2011 Admn.) II SEMESTER COMPLEMENTARY COURSE MODERN INDIAN HISTORY QUESTION BANK Question Bank Complementary Course for i i SemesterDocumento18 páginasUNIVERSITY OF CALICUT SCHOOL OF DISTANCE EDUCATION BA Economics, Sociology & English (2011 Admn.) II SEMESTER COMPLEMENTARY COURSE MODERN INDIAN HISTORY QUESTION BANK Question Bank Complementary Course for i i Semestersoumi_sumi16Ainda não há avaliações
- Piping ComparisonDocumento1 páginaPiping ComparisonDenstar Ricardo SilalahiAinda não há avaliações
- Daily Test 22Documento6 páginasDaily Test 22ajaykrishna_99Ainda não há avaliações
- Fluid Mechanics and Machinery 2E (Kothandaraman & Rudramoorthy) - 1 PDFDocumento6 páginasFluid Mechanics and Machinery 2E (Kothandaraman & Rudramoorthy) - 1 PDFajaykrishna_990% (1)
- Fluid Mechanics and Machinery 2E (Kothandaraman & Rudramoorthy) - 9 PDFDocumento3 páginasFluid Mechanics and Machinery 2E (Kothandaraman & Rudramoorthy) - 9 PDFajaykrishna_99Ainda não há avaliações
- Fluid Mechanics and Machinery 2E (Kothandaraman & Rudramoorthy) - 13 PDFDocumento2 páginasFluid Mechanics and Machinery 2E (Kothandaraman & Rudramoorthy) - 13 PDFajaykrishna_99Ainda não há avaliações
- Fluid Mechanics and Machinery 2E (Kothandaraman & Rudramoorthy) - 12Documento3 páginasFluid Mechanics and Machinery 2E (Kothandaraman & Rudramoorthy) - 12ajaykrishna_99Ainda não há avaliações
- Strength of Materials by S K Mondal 15 PDFDocumento6 páginasStrength of Materials by S K Mondal 15 PDFajaykrishna_99Ainda não há avaliações
- Fluid Mechanics and Machinery 2E (Kothandaraman & Rudramoorthy) - 14 PDFDocumento2 páginasFluid Mechanics and Machinery 2E (Kothandaraman & Rudramoorthy) - 14 PDFajaykrishna_99Ainda não há avaliações
- Fluid Mechanics and Machinery 2E (Kothandaraman & Rudramoorthy) - 13 PDFDocumento2 páginasFluid Mechanics and Machinery 2E (Kothandaraman & Rudramoorthy) - 13 PDFajaykrishna_99Ainda não há avaliações
- Fluid Mechanics and Machinery 2E (Kothandaraman & Rudramoorthy) - 1 PDFDocumento6 páginasFluid Mechanics and Machinery 2E (Kothandaraman & Rudramoorthy) - 1 PDFajaykrishna_990% (1)
- Strength of Materials by S K Mondal 12 PDFDocumento3 páginasStrength of Materials by S K Mondal 12 PDFajaykrishna_99Ainda não há avaliações
- Strength of Materials by S K Mondal 8 PDFDocumento4 páginasStrength of Materials by S K Mondal 8 PDFajaykrishna_99Ainda não há avaliações
- Strength of Materials by S K Mondal 14 PDFDocumento4 páginasStrength of Materials by S K Mondal 14 PDFajaykrishna_99Ainda não há avaliações
- Strength of Materials by S K Mondal 14 PDFDocumento4 páginasStrength of Materials by S K Mondal 14 PDFajaykrishna_99Ainda não há avaliações
- Strength of Materials by S K Mondal 13 PDFDocumento6 páginasStrength of Materials by S K Mondal 13 PDFajaykrishna_99Ainda não há avaliações
- Strength of Materials by S K Mondal 10 PDFDocumento3 páginasStrength of Materials by S K Mondal 10 PDFajaykrishna_99Ainda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- 1st Year Chemistry Chapter No. 5-6 - SQs - NOTESPKDocumento14 páginas1st Year Chemistry Chapter No. 5-6 - SQs - NOTESPKZeeshan ahmedAinda não há avaliações
- Residual VectorsDocumento14 páginasResidual VectorsBrian SpencerAinda não há avaliações
- Factors Affecting Acoustics in BuildingsDocumento2 páginasFactors Affecting Acoustics in BuildingsReign JandaAinda não há avaliações
- Me1303-Gas Dynamics and Jet Propulsion PDFDocumento58 páginasMe1303-Gas Dynamics and Jet Propulsion PDFNarayana SamyAinda não há avaliações
- Prinama Lecture 9-10Documento30 páginasPrinama Lecture 9-10Marcus BernardoAinda não há avaliações
- Momentum EquationDocumento43 páginasMomentum Equationnsbaruaole100% (3)
- Section Page No.: Analysis & Design Calculation For BFP FoundationDocumento39 páginasSection Page No.: Analysis & Design Calculation For BFP FoundationAnonymous fLgaidVBhzAinda não há avaliações
- Sci8 q1 Mod5 Sounds v5Documento28 páginasSci8 q1 Mod5 Sounds v5Bella BalendresAinda não há avaliações
- Hibbeler, Mechanics of Materials-Bending 2Documento68 páginasHibbeler, Mechanics of Materials-Bending 2poom2007Ainda não há avaliações
- EGB111 Week 8 Studio SlidesDocumento23 páginasEGB111 Week 8 Studio SlidesWinston BoonAinda não há avaliações
- Hollow PrismDocumento6 páginasHollow PrismSnehal VinodAinda não há avaliações
- Unsaturated Soil MechanicsDocumento51 páginasUnsaturated Soil MechanicsKrunali Daga100% (1)
- 34.1 Sound Cie - Igcse - Physics - Ext Theory QPDocumento10 páginas34.1 Sound Cie - Igcse - Physics - Ext Theory QPSNIPER GAMINGAinda não há avaliações
- Momentum Equation (X-Direction) :: V V Q F A P A PDocumento5 páginasMomentum Equation (X-Direction) :: V V Q F A P A P01parthAinda não há avaliações
- Manila - FB 15 GeasDocumento5 páginasManila - FB 15 GeasJohn Brix BalisterosAinda não há avaliações
- Hopper Design Report 1 Calculation ManualDocumento19 páginasHopper Design Report 1 Calculation ManualHaziq SulaimanAinda não há avaliações
- Techno India Batanagar Basic Science and Humanities Model QuestionsDocumento12 páginasTechno India Batanagar Basic Science and Humanities Model QuestionsAndre SaputraAinda não há avaliações
- Shock and Vibration DigestDocumento50 páginasShock and Vibration DigestArun0% (1)
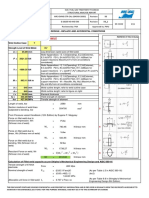
- Weld Design - Inplace and Accidental Conditions: InputDocumento2 páginasWeld Design - Inplace and Accidental Conditions: InputinnovativekarthiAinda não há avaliações
- Module 2 Task 2Documento2 páginasModule 2 Task 2Light HouseAinda não há avaliações
- Chapter 5Documento76 páginasChapter 5esra kadriye akgülAinda não há avaliações
- Units, Physical Quantities, and Vectors: BES 112 Module 1Documento3 páginasUnits, Physical Quantities, and Vectors: BES 112 Module 1Waleed JaddiAinda não há avaliações
- CE 470-Lect-7 (Design of Long Columns in Nonsway Frames) (Read-Only)Documento40 páginasCE 470-Lect-7 (Design of Long Columns in Nonsway Frames) (Read-Only)Jamal RkhAinda não há avaliações
- Experiment E. Liquid Level Control Using Coupled TanksDocumento29 páginasExperiment E. Liquid Level Control Using Coupled Tanks파랑Ainda não há avaliações
- Sumanta Chowdhury - CLS - Aipmt-15-16 - XIII - Phy - Study-Package-3 - Set-1 - Chapter-9 PDFDocumento46 páginasSumanta Chowdhury - CLS - Aipmt-15-16 - XIII - Phy - Study-Package-3 - Set-1 - Chapter-9 PDFsamuel rajAinda não há avaliações
- FEMA 451 Compl - Struct Analysis Performance-BasedDocumento85 páginasFEMA 451 Compl - Struct Analysis Performance-BasedGeorge Sanches100% (2)
- Hydrostatics: Fluid Statics or Hydrostatics Is The Branch of FluidDocumento6 páginasHydrostatics: Fluid Statics or Hydrostatics Is The Branch of FluidJames FranklinAinda não há avaliações
- Practice Problems 2 PO1TF 2016: Problem 1Documento8 páginasPractice Problems 2 PO1TF 2016: Problem 1DamirAljosevicAinda não há avaliações