Você também pode gostar
- Tarea 2Documento14 páginasTarea 2Nataly Puello PereiraAinda não há avaliações
- Estimacion de EstadoDocumento6 páginasEstimacion de EstadoEduardo ZarandaAinda não há avaliações
- Introducción al análisis estadístico multivariado aplicado: Experiencia y casos en el Caribe colombianoNo EverandIntroducción al análisis estadístico multivariado aplicado: Experiencia y casos en el Caribe colombianoNota: 5 de 5 estrelas5/5 (2)
- Taller 1 EconometríaDocumento12 páginasTaller 1 EconometríaDaniela Bravo MejiaAinda não há avaliações
- Compensación de potencia reactiva en sistemas de distribuciónNo EverandCompensación de potencia reactiva en sistemas de distribuciónNota: 5 de 5 estrelas5/5 (1)
- El (Mal) Uso de La Regresión Lineal ESDocumento2 páginasEl (Mal) Uso de La Regresión Lineal ESMIGUEL ANGEL CASTRO LEALAinda não há avaliações
- Practica Deformacion PDFDocumento15 páginasPractica Deformacion PDFSaulo TrejoAinda não há avaliações
- Dialnet ESTIMACIONDEESTADOENSISTEMASELECTRICOSDEPOTENCIAPA 4846301 PDFDocumento6 páginasDialnet ESTIMACIONDEESTADOENSISTEMASELECTRICOSDEPOTENCIAPA 4846301 PDFssalazacAinda não há avaliações
- Normalidad 2Documento38 páginasNormalidad 2Alan GonzálezAinda não há avaliações
- Introduccion Al Problema de Flujo de Potencia.Documento7 páginasIntroduccion Al Problema de Flujo de Potencia.Misael GómezAinda não há avaliações
- Métodos Multivariantes Del Control Estadístico de La CalidadDocumento19 páginasMétodos Multivariantes Del Control Estadístico de La CalidadEbed A. Mamani ChAinda não há avaliações
- Modelado de Sistemas Dinamicos A Partir de Datos EDocumento4 páginasModelado de Sistemas Dinamicos A Partir de Datos EMichelle GüizaAinda não há avaliações
- Pruebas de Diagnostico Cointrgracion Modelos de Correccion de ErroresDocumento87 páginasPruebas de Diagnostico Cointrgracion Modelos de Correccion de ErroresIsaiahn Immanuel GutiérrezAinda não há avaliações
- Analisis DatosDocumento9 páginasAnalisis DatosLucero BardalesAinda não há avaliações
- Manual de Ingeniería de Calidad Unidad 2Documento42 páginasManual de Ingeniería de Calidad Unidad 2elizabeth lopez100% (1)
- Pre InformeDocumento14 páginasPre InformeSantiago García0% (1)
- Pronostico de La Demanda EléctricaDocumento6 páginasPronostico de La Demanda EléctricaDayán QuinterosAinda não há avaliações
- Diseño Experimental Fase 2 Duvan Lopez Codigo 1036944350Documento22 páginasDiseño Experimental Fase 2 Duvan Lopez Codigo 1036944350Duvan Sneider Lopez GonzalezAinda não há avaliações
- La Estimación de Estados de Un Sistema de PotenciaDocumento10 páginasLa Estimación de Estados de Un Sistema de Potenciaadrian garciaAinda não há avaliações
- Actividad Fundamental 2Documento6 páginasActividad Fundamental 2Marco ContrerasAinda não há avaliações
- Consolidado FisicaDocumento9 páginasConsolidado FisicaDiegoAinda não há avaliações
- Informe Laboratorio #1Documento11 páginasInforme Laboratorio #1Julio Caroca VenegasAinda não há avaliações
- El Gráfico de Control t2 de HotellingDocumento11 páginasEl Gráfico de Control t2 de HotellingJulmer MirandaAinda não há avaliações
- Metodos de Bondad de AjusteDocumento7 páginasMetodos de Bondad de AjusteXilef AtsituabAinda não há avaliações
- Evaluacion MetrologiaDocumento12 páginasEvaluacion MetrologiaALEJANDRA GEORGINA MEZA MELENDREZAinda não há avaliações
- Regresion Polinomial Unidad 4Documento21 páginasRegresion Polinomial Unidad 4RomanGCastroPeñaAinda não há avaliações
- An-12 Sistemas Mal CondicionadosDocumento7 páginasAn-12 Sistemas Mal Condicionadosiborella999Ainda não há avaliações
- TABLA PRUEBAS NO PARAMÉTRICASsDocumento36 páginasTABLA PRUEBAS NO PARAMÉTRICASsMARIAAinda não há avaliações
- 1.errores en Mediciones EléctricasDocumento7 páginas1.errores en Mediciones EléctricasInnmanuel Granados100% (1)
- Diseño Robusto Integrado de Un Sistema de Posicionamiento LinealDocumento6 páginasDiseño Robusto Integrado de Un Sistema de Posicionamiento LinealGerardo Cruz EspinosaAinda não há avaliações
- 07-Técnicas de OptimizaciónDocumento27 páginas07-Técnicas de OptimizaciónFSergioSellschAinda não há avaliações
- Ejercicio Integrador Promodel PDFDocumento230 páginasEjercicio Integrador Promodel PDFFabrizzio Barquet100% (3)
- Practica-1 Diseño de ExperimentosDocumento10 páginasPractica-1 Diseño de ExperimentosGiohp1494Ainda não há avaliações
- Analisis de Datos ExperimentalesDocumento18 páginasAnalisis de Datos ExperimentalesHerlem MoratayaAinda não há avaliações
- Estimacion de EstadosDocumento8 páginasEstimacion de EstadosrogeliochcAinda não há avaliações
- Bacallao (2010) ImputacionMultipleVariablesCategoricasDocumento7 páginasBacallao (2010) ImputacionMultipleVariablesCategoricasLuis Angel López RuizAinda não há avaliações
- Sistemas DinamicosDocumento28 páginasSistemas DinamicosMiguel Andres Nieto LozanoAinda não há avaliações
- Act.1 INVESTIGACIÓN 1 - MORALES ESPINOSA JUAN CARLOSDocumento9 páginasAct.1 INVESTIGACIÓN 1 - MORALES ESPINOSA JUAN CARLOSJuan Carlos Morales EspinosaAinda não há avaliações
- Efect OsDocumento30 páginasEfect OsAlejandra Silva SilvaAinda não há avaliações
- Socializando en Las Ténicas o Herramientas de La CalidadDocumento10 páginasSocializando en Las Ténicas o Herramientas de La CalidadIvan JoseAinda não há avaliações
- Optimización de Una Superficie de Respuesta Utilizando JMPDocumento7 páginasOptimización de Una Superficie de Respuesta Utilizando JMPDiego OsakiAinda não há avaliações
- PRACTICA4 Equipo18Documento48 páginasPRACTICA4 Equipo18osiris sagastumeAinda não há avaliações
- Intervalos de PrediccionDocumento30 páginasIntervalos de PrediccionPablo Fuentes PobleteAinda não há avaliações
- Informe Práctica 2-Teoría de Modelos y Simulación de SistemasDocumento4 páginasInforme Práctica 2-Teoría de Modelos y Simulación de SistemasManuela Gomez CorreaAinda não há avaliações
- Incertidumbre RCDocumento15 páginasIncertidumbre RCSoledad RiscoAinda não há avaliações
- Sintesis Optima de Un Mecanismo de Cinco Barras de 2-GDL Utilizando Tecnicas de InteligenciaDocumento14 páginasSintesis Optima de Un Mecanismo de Cinco Barras de 2-GDL Utilizando Tecnicas de InteligenciaADOLF HITLERAinda não há avaliações
- Curso Estadistica ProbabilidadDocumento123 páginasCurso Estadistica ProbabilidadAndres GiraldoAinda não há avaliações
- Coeficiente de RegresiónDocumento11 páginasCoeficiente de RegresiónelysAinda não há avaliações
- Determinacion de La Incertidumbre en MedidasDocumento16 páginasDeterminacion de La Incertidumbre en MedidaspepeAinda não há avaliações
- Analisis de Sistema de MedicionDocumento42 páginasAnalisis de Sistema de MedicionJonapo PortilloAinda não há avaliações
- Metodología de Superficie de Respuesta 2Documento22 páginasMetodología de Superficie de Respuesta 2Verito EscobarAinda não há avaliações
- Minimos Cuadrados en La IngenieriaDocumento7 páginasMinimos Cuadrados en La IngenieriaDavid DiazAinda não há avaliações
- Control Estadístico MultivariadoDocumento5 páginasControl Estadístico MultivariadoDaniela CuetoAinda não há avaliações
- Ajustes de Modelos MatematicosDocumento15 páginasAjustes de Modelos MatematicosJimm KrryAinda não há avaliações
- Validacion de Metodos Analiticos de Laboratorio PDFDocumento8 páginasValidacion de Metodos Analiticos de Laboratorio PDFNancy LimonAinda não há avaliações
- Tratamiento de MulticolinealidadDocumento18 páginasTratamiento de MulticolinealidadFlav_hernandez76Ainda não há avaliações
- Control Estadístico de ProcesosDocumento11 páginasControl Estadístico de ProcesosFabricio Oliver Rivera IzazagaAinda não há avaliações
- EXCEL en Química AnalíticaDocumento47 páginasEXCEL en Química AnalíticaJuan Cho100% (1)
- PID en PICDocumento9 páginasPID en PICArmando Pérez ReynosoAinda não há avaliações
- Curso de PICsDocumento1 páginaCurso de PICsandresunAinda não há avaliações
- Aplicación de Redes Neuronales Artificiales en La Protección de Distancia en Lineas de TransmisionDocumento6 páginasAplicación de Redes Neuronales Artificiales en La Protección de Distancia en Lineas de TransmisionandresunAinda não há avaliações
- Fredyedimerhoyosvelasco.2009 Parte1Documento80 páginasFredyedimerhoyosvelasco.2009 Parte1andresunAinda não há avaliações
- Cartilla de Acreditacion en ColombiaDocumento36 páginasCartilla de Acreditacion en ColombiaALEXANDER1819Ainda não há avaliações
- Gradiente Conjugado Con EjemploDocumento48 páginasGradiente Conjugado Con EjemploandresunAinda não há avaliações
- Plan Expansion 2020 enDocumento175 páginasPlan Expansion 2020 enandresunAinda não há avaliações
- Equivalentes Estaticos para Seleccion de Contingencias en Sistemas Electricos de PotenciaDocumento212 páginasEquivalentes Estaticos para Seleccion de Contingencias en Sistemas Electricos de PotenciaandresunAinda não há avaliações
- Genios Electricos 1Documento151 páginasGenios Electricos 1richard7988Ainda não há avaliações
- Entrenamiento en Estrategias de AprendizajeDocumento2 páginasEntrenamiento en Estrategias de AprendizajeCarlos Manuel Santibáñez50% (4)
- Problemas ResueltosDocumento17 páginasProblemas ResueltosJuan Marcos Huanca MiguelAinda não há avaliações
- Calculo Por Elementos Finitos Lab 1Documento15 páginasCalculo Por Elementos Finitos Lab 1David Serafin EspinozaAinda não há avaliações
- Guiones de Clase Computacion 783 PrincipiantesDocumento14 páginasGuiones de Clase Computacion 783 PrincipiantesJonas Melendez75% (4)
- Taller de Codigos de BarraDocumento2 páginasTaller de Codigos de BarraJose Riquett RiquettAinda não há avaliações
- ErpDocumento2 páginasErpJenii LukumiiAinda não há avaliações
- Ansi AsmeDocumento12 páginasAnsi AsmeomarAinda não há avaliações
- Investigacion de OperacionesDocumento5 páginasInvestigacion de Operacionespe_maes2k77580Ainda não há avaliações
- TESIS UNC COLOMBIA - Propuesta para La Enseñanza de Sistemas de Ecuaciones Lineales PDFDocumento71 páginasTESIS UNC COLOMBIA - Propuesta para La Enseñanza de Sistemas de Ecuaciones Lineales PDFleunam2004100% (1)
- Montar Servodor Web Cherokee PHP y Mysql en Ubuntu 10.04Documento8 páginasMontar Servodor Web Cherokee PHP y Mysql en Ubuntu 10.04Manuel Mtz BAinda não há avaliações
- Manual de Ilustracion Digital de ModaDocumento126 páginasManual de Ilustracion Digital de ModaNanda Lapo92% (13)
- Arreglos y MatricesDocumento45 páginasArreglos y MatricesAnonymous P2TuxR9bmAinda não há avaliações
- Manual de OutlookDocumento95 páginasManual de OutlookJosé Fernando Lastres CastroAinda não há avaliações
- Problemas Clase Programación Dinámica Sem 1 2015Documento4 páginasProblemas Clase Programación Dinámica Sem 1 2015JONSONAinda não há avaliações
- Torres Harold - EtiquetasDocumento10 páginasTorres Harold - EtiquetasHarold Alejandro TorresAinda não há avaliações
- Proyecto Final AnalisisDocumento16 páginasProyecto Final AnalisisDouglas BorgesAinda não há avaliações
- FGL 029 Guia de Trabajo Practico - Experimental - Teclado MatricialDocumento15 páginasFGL 029 Guia de Trabajo Practico - Experimental - Teclado MatricialAndres LozanoAinda não há avaliações
- SSH GratisDocumento5 páginasSSH GratisDanny PrakosoAinda não há avaliações
- 10 Ejemplos de Software en LineaDocumento4 páginas10 Ejemplos de Software en LineaAleydi Aviles33% (3)
- SACYRDocumento1 páginaSACYRWalvarez ManriqueAinda não há avaliações
- Manual Del AplicadorDocumento38 páginasManual Del AplicadorMAR4ITZAMGHA62% (13)
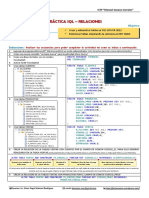
- Prc3a1ctica SQL 3Documento3 páginasPrc3a1ctica SQL 3StevenWilliamsCastilloAbrilAinda não há avaliações
- Instrumento para Evaluar SilaboDocumento10 páginasInstrumento para Evaluar SilaboJoel Ninanya Rojas100% (2)
- Diseño de ProcesosDocumento3 páginasDiseño de ProcesosKathya Vargas CedeñoAinda não há avaliações
- Jit Jidoka Lean Manufacturing PDFDocumento37 páginasJit Jidoka Lean Manufacturing PDFAna RodriguezAinda não há avaliações
- Bases Del Concurso Busqueda Del Tesoro Version 3 (1) .0Documento8 páginasBases Del Concurso Busqueda Del Tesoro Version 3 (1) .0SamirVargasSoto100% (1)
- Numeracion Con Otra BaseDocumento5 páginasNumeracion Con Otra BasePato SaquicAinda não há avaliações
- Lenguaje de Simulacion y SimuladoresDocumento14 páginasLenguaje de Simulacion y SimuladoresAnonymous Fi9UVCKImlAinda não há avaliações
- Justine StandaertDocumento4 páginasJustine StandaertasdfAinda não há avaliações