Você também pode gostar
- AER710 Co W2012Documento4 páginasAER710 Co W2012Brad JonesAinda não há avaliações
- Use of Industrial Robots ForDocumento13 páginasUse of Industrial Robots ForBrad JonesAinda não há avaliações
- Notes-2nd Order ODE Pt2Documento23 páginasNotes-2nd Order ODE Pt2Himanshu SharmaAinda não há avaliações
- A Prediction and Motion-Planning Scheme ForDocumento16 páginasA Prediction and Motion-Planning Scheme ForBrad JonesAinda não há avaliações
- VibrationIsolation by Simmons PDFDocumento10 páginasVibrationIsolation by Simmons PDFaruatscribdAinda não há avaliações
- Hog 1985Documento24 páginasHog 1985Brad JonesAinda não há avaliações
- Attitude Determination and ControlDocumento3 páginasAttitude Determination and ControlBrad JonesAinda não há avaliações
- HelloDocumento1 páginaHelloBrad JonesAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (120)
- EPW, Vol.58, Issue No.44, 04 Nov 2023Documento66 páginasEPW, Vol.58, Issue No.44, 04 Nov 2023akashupscmadeeaseAinda não há avaliações
- Analisis Kebutuhan Bahan Ajar Berbasis EDocumento9 páginasAnalisis Kebutuhan Bahan Ajar Berbasis ENur Hanisah AiniAinda não há avaliações
- CE EVALUATION EXAM No. 4 - MGT, Fluid Properties, Hydrostatic Force (Answer Key)Documento6 páginasCE EVALUATION EXAM No. 4 - MGT, Fluid Properties, Hydrostatic Force (Answer Key)Angelice Alliah De la CruzAinda não há avaliações
- G.Devendiran: Career ObjectiveDocumento2 páginasG.Devendiran: Career ObjectiveSadha SivamAinda não há avaliações
- 53 English Work Book XDocumento292 páginas53 English Work Book XArun DhawanAinda não há avaliações
- Construction Project - Life Cycle PhasesDocumento4 páginasConstruction Project - Life Cycle Phasesaymanmomani2111Ainda não há avaliações
- FINAL SMAC Compressor Control Philosophy Rev4Documento6 páginasFINAL SMAC Compressor Control Philosophy Rev4AhmedAinda não há avaliações
- Passage To Abstract Mathematics 1st Edition Watkins Solutions ManualDocumento25 páginasPassage To Abstract Mathematics 1st Edition Watkins Solutions ManualMichaelWilliamscnot100% (50)
- PTW Site Instruction NewDocumento17 páginasPTW Site Instruction NewAnonymous JtYvKt5XEAinda não há avaliações
- 12 Step Worksheet With QuestionsDocumento26 páginas12 Step Worksheet With QuestionsKristinDaigleAinda não há avaliações
- AYUMJADocumento1 páginaAYUMJASoumet Das SoumetAinda não há avaliações
- Third Party Risk Management Solution - WebDocumento16 páginasThird Party Risk Management Solution - Webpreenk8Ainda não há avaliações
- L GSR ChartsDocumento16 páginasL GSR ChartsEmerald GrAinda não há avaliações
- Tribes Without RulersDocumento25 páginasTribes Without Rulersgulistan.alpaslan8134100% (1)
- JO 20221109 NationalDocumento244 páginasJO 20221109 NationalMark Leo BejeminoAinda não há avaliações
- Government Hazi Muhammad Mohsin College Chattogram: Admission FormDocumento1 páginaGovernment Hazi Muhammad Mohsin College Chattogram: Admission FormThe Helper SoulAinda não há avaliações
- IJRHAL - Exploring The Journey of Steel Authority of India (SAIL) As A Maharatna CompanyDocumento12 páginasIJRHAL - Exploring The Journey of Steel Authority of India (SAIL) As A Maharatna CompanyImpact JournalsAinda não há avaliações
- Rankine-Froude Model: Blade Element Momentum Theory Is A Theory That Combines BothDocumento111 páginasRankine-Froude Model: Blade Element Momentum Theory Is A Theory That Combines BothphysicsAinda não há avaliações
- The Pneumatics of Hero of AlexandriaDocumento5 páginasThe Pneumatics of Hero of Alexandriaapi-302781094Ainda não há avaliações
- 2010 - Howaldt y Schwarz - Social Innovation-Concepts, Research Fields and International - LibroDocumento82 páginas2010 - Howaldt y Schwarz - Social Innovation-Concepts, Research Fields and International - Librovallejo13Ainda não há avaliações
- Clustering Menggunakan Metode K-Means Untuk Menentukan Status Gizi BalitaDocumento18 páginasClustering Menggunakan Metode K-Means Untuk Menentukan Status Gizi BalitaAji LaksonoAinda não há avaliações
- Uniform Motion WorksheetDocumento8 páginasUniform Motion Worksheetnikhil patro100% (1)
- Job Satisfaction of Library Professionals in Maharashtra State, India Vs ASHA Job Satisfaction Scale: An Evaluative Study Dr. Suresh JangeDocumento16 páginasJob Satisfaction of Library Professionals in Maharashtra State, India Vs ASHA Job Satisfaction Scale: An Evaluative Study Dr. Suresh JangeNaveen KumarAinda não há avaliações
- Jurnal Job DescriptionDocumento13 páginasJurnal Job DescriptionAji Mulia PrasAinda não há avaliações
- BPS C1: Compact All-Rounder in Banknote ProcessingDocumento2 páginasBPS C1: Compact All-Rounder in Banknote ProcessingMalik of ChakwalAinda não há avaliações
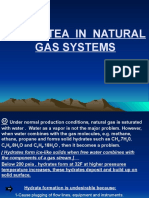
- Chapter 2 HydrateDocumento38 páginasChapter 2 HydrateTaha Azab MouridAinda não há avaliações
- Installing Surge Protective Devices With NEC Article 240 and Feeder Tap RuleDocumento2 páginasInstalling Surge Protective Devices With NEC Article 240 and Feeder Tap RuleJonathan Valverde RojasAinda não há avaliações
- Structural Design Basis ReportDocumento31 páginasStructural Design Basis ReportRajaram100% (1)
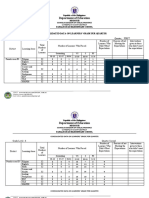
- Department of Education: Consolidated Data On Learners' Grade Per QuarterDocumento4 páginasDepartment of Education: Consolidated Data On Learners' Grade Per QuarterUsagi HamadaAinda não há avaliações
- Functions of Theory in ResearchDocumento2 páginasFunctions of Theory in ResearchJomariMolejonAinda não há avaliações