Você também pode gostar
- Monitors: - Programming Language Construct That Supports Controlled Access To Shared DataDocumento11 páginasMonitors: - Programming Language Construct That Supports Controlled Access To Shared DatasrkcsAinda não há avaliações
- CPU Scheduling: Basic ConceptsDocumento3 páginasCPU Scheduling: Basic ConceptssrkcsAinda não há avaliações
- DMCSDocumento142 páginasDMCSsrkcsAinda não há avaliações
- Geo GebraDocumento19 páginasGeo Gebrasrkcs100% (2)
- A Short Guide On C ProgrammingDocumento28 páginasA Short Guide On C ProgrammingsrkcsAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- CE 411 Lecture 03 - Moment AreaDocumento27 páginasCE 411 Lecture 03 - Moment AreaNophiAinda não há avaliações
- Avaya Call History InterfaceDocumento76 páginasAvaya Call History InterfaceGarrido_Ainda não há avaliações
- Brochure sp761lfDocumento10 páginasBrochure sp761lfkathy fernandezAinda não há avaliações
- SA Flight Instructors Training ProceduresDocumento371 páginasSA Flight Instructors Training ProceduresGuilioAinda não há avaliações
- PDK Repair Aftersales TrainingDocumento22 páginasPDK Repair Aftersales TrainingEderson BJJAinda não há avaliações
- SECTION 1213, 1214, 1215: Report By: Elibado T. MaureenDocumento19 páginasSECTION 1213, 1214, 1215: Report By: Elibado T. MaureenJohnFred CativoAinda não há avaliações
- .Preliminary PagesDocumento12 páginas.Preliminary PagesKimBabAinda não há avaliações
- Seamless Fiux Fored Wire - Megafil250Documento1 páginaSeamless Fiux Fored Wire - Megafil250SungJun ParkAinda não há avaliações
- Ruckus Wired Accreditation ExamDocumento15 páginasRuckus Wired Accreditation ExamDennis Dube25% (8)
- TIL 1881 Network Security TIL For Mark VI Controller Platform PDFDocumento11 páginasTIL 1881 Network Security TIL For Mark VI Controller Platform PDFManuel L LombarderoAinda não há avaliações
- Yucca Mountain Safety Evaluation Report - Volume 2Documento665 páginasYucca Mountain Safety Evaluation Report - Volume 2The Heritage FoundationAinda não há avaliações
- Fundamentals of Fluid Mechanics (5th Edition) - Munson, OkiishiDocumento818 páginasFundamentals of Fluid Mechanics (5th Edition) - Munson, OkiishiMohit Verma85% (20)
- F4 Search Help To Select More Than One Column ValueDocumento4 páginasF4 Search Help To Select More Than One Column ValueRicky DasAinda não há avaliações
- DC PandeyDocumento3 páginasDC PandeyPulkit AgarwalAinda não há avaliações
- Nuendo 4 Remote Control Devices EsDocumento24 páginasNuendo 4 Remote Control Devices EsRamon RuizAinda não há avaliações
- 1996 Club Car DS Golf Cart Owner's ManualDocumento48 páginas1996 Club Car DS Golf Cart Owner's Manualdriver33b60% (5)
- Programmable Safety Systems PSS-Range: Service Tool PSS SW QLD, From Version 4.2 Operating Manual Item No. 19 461Documento18 páginasProgrammable Safety Systems PSS-Range: Service Tool PSS SW QLD, From Version 4.2 Operating Manual Item No. 19 461MAICK_ITSAinda não há avaliações
- Vertical Take Off and LandingDocumento126 páginasVertical Take Off and LandingMukesh JindalAinda não há avaliações
- Source 22Documento2 páginasSource 22Alexander FloresAinda não há avaliações
- MC9S12XD128 ProcessadorDocumento1.350 páginasMC9S12XD128 ProcessadorMarcelo OemAinda não há avaliações
- 031 - Btech - 08 Sem PDFDocumento163 páginas031 - Btech - 08 Sem PDFtushant_juneja3470Ainda não há avaliações
- Crisfield - Vol1 - NonLinear Finite Element Analysis of Solids and Structures EssentialsDocumento360 páginasCrisfield - Vol1 - NonLinear Finite Element Analysis of Solids and Structures EssentialsAnonymous eCD5ZRAinda não há avaliações
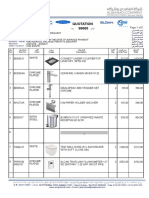
- Quotation 98665Documento5 páginasQuotation 98665Reda IsmailAinda não há avaliações
- CFJV00198BDocumento360 páginasCFJV00198BCheongAinda não há avaliações
- Research Papers in Mechanical Engineering Free Download PDFDocumento4 páginasResearch Papers in Mechanical Engineering Free Download PDFtitamyg1p1j2Ainda não há avaliações
- RT120 ManualDocumento161 páginasRT120 ManualPawełAinda não há avaliações
- E Insurance ProjectDocumento10 páginasE Insurance ProjectChukwuebuka Oluwajuwon GodswillAinda não há avaliações
- Process Control in SpinningDocumento31 páginasProcess Control in Spinningapi-2649455553% (15)
- Photosynthesis LabDocumento3 páginasPhotosynthesis Labapi-276121304Ainda não há avaliações
- ReadMe STEP7 Professional V14 enUS PDFDocumento74 páginasReadMe STEP7 Professional V14 enUS PDFAndre Luis SilvaAinda não há avaliações