Escolar Documentos
Profissional Documentos
Cultura Documentos
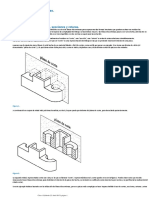
Libro Ecu Correc
Enviado por
Vladimir MorenoDireitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Libro Ecu Correc
Enviado por
Vladimir MorenoDireitos autorais:
Formatos disponíveis
Indice general
1. Nociones Fundamentales 5
1.1. Deniciones y ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.1.0.1. Clasicaci on de las Ecuaciones Diferenciales . . . . . . . 7
1.1.0.2. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.1.0.3. Soluci on . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.2. Soluci on de una ecuaci on diferencial. . . . . . . . . . . . . . . . . . . . . 12
1.3. Soluci on General y Particular . . . . . . . . . . . . . . . . . . . . . . . . 15
1.3.0.4. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.3.0.5. Soluci on . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.4. Problema de Valor Inicial . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.5. An alisis Cualitativo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.5.1. Campo de Direcciones . . . . . . . . . . . . . . . . . . . . . . . . 18
1.5.2. Metodo de campos de direccion . . . . . . . . . . . . . . . . . . . 19
1.5.3. Metodo de Isoclinas . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.5.4. Lneas de fase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.6. Gr acas con Maple y Calculadora . . . . . . . . . . . . . . . . . . . . . . 27
1.6.1. Uso de calculadora. . . . . . . . . . . . . . . . . . . . . . . . . . . 28
1.6.1.1. Uso del programa Maple. . . . . . . . . . . . . . . . . . 29
1.7. El metodo de aproximaci on de Euler . . . . . . . . . . . . . . . . . . . . 30
1.7.0.2. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . 34
1.7.0.3. Soluci on . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2. Ecuaciones Diferenciales de Primer Orden 41
2.1. Ecuaciones Separables . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
2.1.1. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
2.1.2. Solucion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
2.2. Ecuaciones exactas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
2.2.1. Solucion de una ecuaci on diferencial exacta . . . . . . . . . . . . . 46
2.2.2. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
2.2.3. Solucion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
1
2
INDICE GENERAL
2.3. Factor integrante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
2.3.0.1. Metodo para hallar factores integrantes especiales . . . . 54
2.3.1. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
2.3.2. Solucion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
2.4. Ecuaciones diferenciales lineales . . . . . . . . . . . . . . . . . . . . . . . 58
2.4.1. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
2.4.2. Solucion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
2.5. Soluciones por Sustituciones . . . . . . . . . . . . . . . . . . . . . . . . . 62
2.5.1. Ecuaciones Diferenciales Homogeneas . . . . . . . . . . . . . . . 62
2.5.2. Ecuaciones con coecientes lineales . . . . . . . . . . . . . . . . . 64
2.5.3. La Ecuacion de Bernoulli . . . . . . . . . . . . . . . . . . . . . . 68
2.5.4. La Ecuaci on de Ricatti . . . . . . . . . . . . . . . . . . . . . . . . 71
2.5.5. Ecuacion de Lagrange . . . . . . . . . . . . . . . . . . . . . . . . 73
2.5.6. Reducci on a Separaci on de Variables . . . . . . . . . . . . . . . . 75
2.5.7. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
2.5.8. Solucion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
2.6. Soluci on de Ecuaciones Diferenciales Con Maple y Calculadora . . . . . . 80
3. Aplicaciones de las Ecuaciones Diferenciales de Primer Orden 81
3.1. Ley de enfriamiento de Newton . . . . . . . . . . . . . . . . . . . . . . . 81
3.1.0.1. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . 82
3.1.0.2. Soluci on . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
3.2. Crecimiento y Decrecimiento . . . . . . . . . . . . . . . . . . . . . . . . . 84
3.2.1. Determinacion de edades por el metodo del Carbono 14 . . . . . . 85
3.2.2. Modelo logstico de crecimiento poblacional . . . . . . . . . . . . 87
3.2.2.1. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . 92
3.2.2.2. Soluci on . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
3.3. Mezclas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
3.3.0.3. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . 99
3.4. Trayectorias Ortogonales . . . . . . . . . . . . . . . . . . . . . . . . . . 100
3.5. Mecanica de Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
3.6. Calentamiento y Enfriamiento de Edicios . . . . . . . . . . . . . . . . . 107
3.6.0.4. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . 113
4. Ecuaciones Diferenciales Lineales de Orden Superior 117
4.1. Teora preliminar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
4.1.1. Operadores Diferenciales Lineales . . . . . . . . . . . . . . . . . . 118
4.1.1.1. Linealidad Del Operador Diferencial . . . . . . . . . . . 118
4.1.2. Soluciones fundamentales de ecuaciones homogeneas . . . . . . . 119
4.1.2.1. Dependencia lineal . . . . . . . . . . . . . . . . . . . . . 120
INDICE GENERAL 3
4.1.2.2. El wronskiano . . . . . . . . . . . . . . . . . . . . . . . . 120
4.1.2.3. Conjunto fundamental de soluciones . . . . . . . . . . . 121
4.2. Reducci on de Orden. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
4.3. Ecuaciones lineales homogeneas con coecientes constantes . . . . . . . . 125
4.4. Ecuaciones lineales no homogeneas . . . . . . . . . . . . . . . . . . . . . 129
4.4.0.4. Metodo de Coecientes Indeterminados . . . . . . . . . 129
4.5. Variaci on de Parametros . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
4.6. Ecuacion de Cauchy-Euler . . . . . . . . . . . . . . . . . . . . . . . . . . 136
4.7. Aplicaciones a la Fsica . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
4.7.1. Movimiento Armonico Simple . . . . . . . . . . . . . . . . . . . . 141
4.7.2. Movimiento Amortiguado . . . . . . . . . . . . . . . . . . . . . . 144
5. Introducci on a los sistemas de ecuaciones diferenciales 155
5.1. Plano Fase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
5.2. Tipos de Puntos Crticos . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
5.2.1. Notacion matricial de los sistemas lineales . . . . . . . . . . . . . 163
5.2.2. Soluci on de sistemas de ecuaciones diferenciales lineales . . . . . 164
5.3. Sistemas Lineales Homogeneos con Coecientes Constantes . . . . . . . . 167
5.3.1. Races Reales repetidas . . . . . . . . . . . . . . . . . . . . . . . . 170
5.3.2. Races complejas conjugadas . . . . . . . . . . . . . . . . . . . . 170
5.4. El Plano Traza Determinante . . . . . . . . . . . . . . . . . . . . . . . . 171
5.5. Metodo de Eliminacion Para Sistemas . . . . . . . . . . . . . . . . . . . 172
6. Transformada de Laplace 187
6.1. Transformada de Laplace . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
6.1.1. Linealidad de la transformada . . . . . . . . . . . . . . . . . . . . 190
6.1.2. Propiedades de la Transformada de Laplace . . . . . . . . . . . . 196
6.2. Transformada Inversa de Laplace . . . . . . . . . . . . . . . . . . . . . . 198
6.3. Aplicaciones de la transformada de laplace . . . . . . . . . . . . . . . . . 203
6.3.1. Soluci on de problemas con Valores Iniciales . . . . . . . . . . . . 204
6.3.2. Soluci on de Sistemas de Ecuaciones con Valores Iniciales . . . . . 206
6.4. Transformada de Funciones Discontinuas y Periodicas . . . . . . . . . . . 208
6.5. La funci on Delta de Dirac . . . . . . . . . . . . . . . . . . . . . . . . . . 216
6.6. Convoluci on . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 219
6.7. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221
7. Soluci on de Ecuaciones Diferenciales Mediante Series 227
7.1. Series de Potencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227
7.1.0.1. Una serie de potencias dene una funcion: . . . . . . . . 228
7.2. Soluciones en Series de Potencias . . . . . . . . . . . . . . . . . . . . . . 228
4
INDICE GENERAL
Captulo 1
Nociones Fundamentales
En este captulo el lector encontrar a el lenguaje basico de las ecuaciones diferenciales
ordinarias, una primera clasicaci on y el teorema fundamental de existencia y unicidad
de soluciones de ecuaciones diferenciales ordinarias que satisfacen ciertas condiciones
naturales.
Antes de entrar en detalles tecnicos, precisaremos el signicado de algunos terminos que,
en ocaciones, se suponen de conocimiento general.
Denici on 1.1. Un objeto es una unidad elemental sobre la que se pueden hacer ob-
servaciones y cuya estructura interna no existe o se puede ignorar. Un sistema es una
colecci on de objetos relacionados entre si. Una descripcion es una representaci on de un
fen omeno por medio de un lenguaje, en nuestro caso, lenguaje matematico explicando
sus distintas etapas, partes y/o cualidades. Un modelo es una descripcion matematica de
un sistema.
En las ciencias, los modelos matem aticos son usados para buscar comprender fenomenos
naturales, sistemas reales biologicos o fsicos, a traves de la identicaci on de las variables
que intervienen en la situaci on o problema y a continuacion cuanticando, generalmente
mediante el uso de ecuaciones, las relaciones existentes entre las variables identicadas.
Este procedimiento permite predecir el comportamiento futuro aproximado del sistema
bajo estudio y, de ser posible, la manipulaci on del mismo.
Los problemas que son de interes en areas de las ciencias e ingeniera, son problemas
din amicos, que involucran variables independientes que cambian respecto de otras varia-
bles dependientes y es precisamente el concepto de derivada, los que permiten describir
cuantitativamente las relaciones entres las variables involucradas en la descripci on del
problema en estudio. Como consecuencia, las ecuaciones diferenciales aparecen constitu-
yendo ejemplos de modelos matem aticos.
5
6 CAP
ITULO 1. NOCIONES FUNDAMENTALES
En apariencia, las ecuaciones diferenciales parecen ser algo nuevo para nosotros, sin
embargo ya nos hemos encontrado con el problema de resolver ecuaciones diferenciales
en areas como la fsica o de la misma matematica. Por ejemplo, al determinar la posici on
de un cuerpo en movimiento o en la b usqueda de las antiderivadas de una funci on dada.
1.1. Deniciones y ejemplos
Denici on 1.2. Se llama ecuacion diferencial a toda ecuaci on que involucre una funci on
desconocida y alguna de sus derivadas. M as exactamente, una ecuacion diferencial es una
expresi on de la forma
F(x
1
, , x
t
, f,
f
x
1
, ,
n
1
f
x
n
1
1
,
f
x
2
, ,
n
2
f
x
n
2
2
,
f
x
t
, ,
nt
f
x
nt
t
) = 0, (1.1)
que involucre una funci on desconocida f en las variables x
1
, . . . , x
t
; algunas de sus deri-
vadas y donde F denota una funcion de n = n
1
+ + n
t
variables.
A continuaci on presentaremos algunos ejemplos sencillos de ecuaciones diferenciales que
aparecen en algunas areas de las ciencias.
Ejemplo 1.3. Un modelo sencillo para el crecimiento de poblaciones es la Ley de Malthus,
la cual arma que la tasa de crecimiento de la poblaci on de un pas aumenta en forma
proporcional a la poblaci on total P(t) del mismo en cualquier momento t. En otras
palabras, mientras m as personas haya en el momento t, m as personas habr a en el futuro.
En terminos matem aticos
dP
dt
= kP, (1.2)
donde k es la constante de propocionalidad.
Ejemplo 1.4. La segunda ley de Newton, la cual se encarga de cuanticar el concepto
de fuerza, arma que la fuerza neta F aplicada sobre una partcula de masa m es igual
al cambio en su momentum lineal con respecto al tiempo. En el caso en que la masa
del cuerpo permanece constante, se deduce que la fuerza aplicada sobre el cuerpo es
proporcional a la aceleraci on a(t) que adquiere dicho cuerpo, esto es,
F = ma.
Si x(t) denota la posici on de la particula en el tiempo t, entonces se tiene la siguiente
ecuaci on diferencial,
F
_
t, x,
dx
dt
_
m
d
2
x
dt
2
= 0, (1.3)
1.1. DEFINICIONES Y EJEMPLOS 7
donde la fuerza F es una funcion que depende del tiempo t, de la posici on x(t) y de la
velocidad dx/dt.
Ejemplo 1.5. El modelo de Hodgkin-Huxley para pulsos neuronales. En neurobiologa,
la comunicacion neuronal es un area de activa investigaci on. En este caso, se pretende
estudiar las se nales electricas, tambien conocidas como pulsos o disparos, realizados por
celulas nerviosas individuales o neuronas. El encargado de propagar las se nales electri-
cas hacia el exterior de una neurona es el axon, tambien conocido como cilindroeje o
neurita y el cual es un tubo cilndrico largo que se extiende desde cada neurona. Los
pulsos electricos aparecen dado que la membrana de cada neourona tiene preferencias de
permeabilidad, esto es, es f acilmente permeable por ciertos iones qumicos para los cuales
dicha permeabilidad es afectada por las corrientes y potenciales presentes.
Los elementos mas importantes en este sistema son los iones de sodio (Na
+
), los de
potasio (K
+
); y la diferencia de potencial V existente entre el interior de la membrana
y el medio circundante, debido a las altas concetraciones de iones de K
+
al interior del
ax on. El modelo de Hodgkin-Huxley propone la siguiente ecuaci on para el potencial V ,
C
dV
dt
= I
e
I
i
, (1.4)
donde C es la capacitancia de la membrana, I
e
la corriente externa e I
i
la corriente
interna. La corriente interna, a su vez, satisface una ecuaci on del siguiente estilo
I
i
= g
0
(V V
0
) + g
1
m
3
h(V V
1
) + g
2
n
4
(V V
2
), (1.5)
donde g
0
, g
1
, g
2
> 0 y V
0
, V
1
, V
2
son constantes, mientras que m, n, h son variables de
bloqueo, correspondientes a la activacion del sodio (Na
+
), activacion de potacio (K
+
)
e inactivacion de Na
+
respectivamente. El modelo es normalizado, de forma tal que las
variables de bloqueo siempre tomen valores entre 0 y 1 y tal que puedan ser interpretadas
como probabilidades para que cierto tipo de canal este abierto. Al combinar las dos
ecuaciones (1.4) y (1.5) obtenemos
C
dV
dt
= I
e
(g
0
(V V
0
) + g
1
m
3
h(V V
1
) + g
2
n
4
(V V
2
)). (1.6)
Mientras I
e
es tratado como un par ametro externo, la dinamica interna depende en gran
parte del signo de los tres tres terminos que aparecen en (1.5).
1.1.0.1. Clasicaci on de las Ecuaciones Diferenciales
1. Ecuacion Diferencial Ordinaria: Una ecuacion diferencial es llamada ecua-
cion diferencial ordinaria, abreviando EDO, si es una ecuacion diferencial que s olo
8 CAP
ITULO 1. NOCIONES FUNDAMENTALES
contiene derivadas ordinarias. Mas exactamente, si es una ecuaci on diferencial de
la forma
F
_
x, f,
df
dx
, ,
d
n
f
dx
n
_
= 0, (1.7)
2. Ecuacion Diferencial Parcial: Una ecuacion diferencial parcial es una ecua-
ci on diferencial de la forma (1.1) en la cual aparecen las derivadas parciales de una
funci on que depende de m as de una variable.
Ejemplo 1.6. La ecuacion diferencial
dx
dt
+ 4x = cos(x),
donde x es la variable dependiente y t la variable independiente, es una ecuaci on diferen-
cial ordinaria.
Ejemplo 1.7. Las ecuaciones diferenciales (1.2), (1.3) y (1.6) asociadas a los modelos
descritos en los Ejemplos 1.3, 1.4 y 1.5, son ejemplos de ecuaciones diferenciales ordina-
rias.
Ejemplo 1.8. La ecuacion diferencial
x
y
+
x
t
= 3,
donde x y t son variables independientes e y es la variable dependiente, es un ejemplo de
ecuaci on diferencial parcial.
Ejemplo 1.9. Otro ejemplo de ecuaci on diferencial parcial viene dado por
2
u
t
2
= c
2
2
u
x
2
p
u
t
qu,
donde c es una constante. Esta ecuaci on es llamada ecuacion del telegrafo, dado que
apareci o por primer vez al tratar de determinar la distribucion de la corriente y el voltaje
a lo largo de las lineas terrestres de los telegrafos.
Ejemplo 1.10. El ujo de calor en un s olido esta governado por la ecuaci on diferencial
parcial
x
_
x
T
x
_
+
y
_
y
T
y
_
= c
T
t
,
donde
x
y
y
son las conductividades termicas del solido en las direcciones x e y, T es
la temperatura, la densidad del s olido y c una constante.
1.1. DEFINICIONES Y EJEMPLOS 9
Ahora que estamos en capacidad de distinguir las ecuaciones diferenciales de acuerdo a su
tipo, es momento de renar un poco mas nuestra clasicacion. Para tal n, introduciremos
a continuaci on el concepto de orden y linealidad de una ecuaci on diferencial.
Denici on 1.11. El orden de una ecuaci on diferencial es el orden de la mayor derivada
que aparecen en la ecuaci on.
Ejemplo 1.12. Consideremos la ecuacion diferencial ordinaria
F(x, y, y
, y
, , y
(n)
) = 0, (1.8)
donde F es una funci on de n + 2 viariables. Si en la expresion explicita de la ecuaci on
(1.8) aparece y
(n)
, entonces nos encontramos frente a una ecuacion diferencial ordinaria
de orden n.
Ejemplo 1.13. A continuaci on explicaremos un poco el ejemplo anterior e indicaremos
en cada caso a que funci on corresponde F.
1. La ecuaci on diferencial
d
2
y
dx
2
+ 2
dy
dx
+ 3y = 0 es una ecuacion diferencial de orden 2
en la cual F est a dada por la funci on F(x, y, z, w) = 3y + 2z + w. N otese que si
reemplazamos z por la primera derivada de y y w por la segunda derivada de y e
igualamos a cero, obtenemos la ecuacion diferencial dada.
2. De la misma forma, la ecuaci on diferencial
d
2
x
dt
2
+ x
dx
dt
cos(t)x = e
t
es una
ecuaci on diferencial ordinaria de orden 2, en la cual la funcion F corresponde a
F(t, x, u, v) = w + xu cos(t)x e
t
.
3. La ecuaci on diferencial
d
3
x
dt
3
= sin(x) es una ecuaci on diferencial ordinaria de orden
3, en la cual la funci on F corresponde a F(t, x, y, z, w) = w sin(x).
Denici on 1.14. El grado de una ecuaci on diferencial es el exponente al cual esta elevada
la derivada de mayor orden que aparece en ella. Si esta derivada esta elevada a un
exponente no natural el grado de la ecuaci on no est a denido.
Ejemplo 1.15. a) x
3
y
+2x
2
y
+3xy
+4x = 0 es una ecuacion diferencial ordinaria
de tercer orden y primer grado.
b) (y
)
2
= sin(x) +ye
x
es una ecuaci on diferencial ordinaria de segundo orden y grado
2.
10 CAP
ITULO 1. NOCIONES FUNDAMENTALES
Denici on 1.16. Una ecuacion diferencial ordinaria es lineal, si es de la forma
a
n
(x)
d
n
y
dx
n
+ a
n1
(x)
d
n1
y
dx
n1
+ + a
1
(x)
dy
dx
+ a
0
(x)y + g(x) = 0, (1.9)
donde los coecientes g(x) y a
i
(x) con i = 1, . . . , n son funciones que no dependen de la
funci on inc ogina y y de ninguna de sus derivadas.
Si la ecuaci on diferencial no puede llevarse a la forma (1.9) decimos que la ecuaci on es
no lineal.
Observacion 1.17. An alogo al caso de las ecuaciones algebraicas, en general, no tiene
sentido hablar del grado de una EDO. Por ejemplo, si en una ecuacion diferencial, alguna
de las derivadas de la funcion incognita aparece con un exponente que no es un n ume-
ro natural o tambien cuando aparecen haciendo parte del argumento de una funci on
transcendete, como por ejemplo sin, ln, exp o cualquier otra de este estilo.
Ejemplo 1.18. La EDO x
3
y
+ 2x
2
y
+ 3xy
+ 4x = 0 es una ecuaci on diferencial
ordinaria de tercer orden y grado uno.
Ejemplo 1.19. La ecuacion diferencial (y
)
2
= sin(x) + ye
x
es una ecuaci on diferencial
ordinaria cuadr atica de segundo orden.
Ejemplo 1.20. La ecuaci on diferencial exp(
d
2
y
dx
2
)+
dy
dx
= sin(x), es un ejemplo de ecuaci on
diferencial de segundo orden no lineal. Notese que este es un ejemplo en el cual no tiene
sentido hablar del grado de la ecuacion.
Otros ejemplos de ecuaciones diferenciales no lineales son los siguientes,
Ejemplo 1.21. La ecuacion diferencial parcial
u
t
+
3
u
x
6f(t)u
u
x
= g(t, u),
llamada ecuacion de Korteweig-de Vries (KdV), usada para modelar el comportamiento
de ondas en aguas poco profundas.
Ejemplo 1.22. La ecuacon de Van der Pol, es una ecuaci on diferencial ordinaria cuadrati-
ca de segundo orden
d
2
x
dt
2
(1 x
2
)
dx
dt
+ x = 0,
donde es una constante, usada para describir el comportamiento de un oscilador no
conservativo con amortiguamiento no lineal.
Ejemplo 1.23. Las ecuaci on diferenciales
dy
dx
= xy
2
y
d
3
y
dx
3
+y
2
= 0, tambien son ejemplos
de ecuaciones diferenciales ordinarias no lineales.
1.1. DEFINICIONES Y EJEMPLOS 11
1.1.0.2. Ejercicios
1. Clasique las siguientes ecuaciones diferenciales de acuerdo a su tipo, indique las
variables dependiente e independiente y proporcione el orden de la ecuacion. Si la
ecuaci on diferencial es ordinaria, determine si es lineal o no lineal.
a) 3y
4xy
+ x
3
y 4 = 0.
b) ln(x) 3xy
4xy = sin(x).
c) 3xy
3y
+ 4y y
2
= 0.
d)
_
d
2
y
dx
2
_
3
cos(x) + 4xy
dy
dx
+ y
2
e
x
= 0.
e) 3
3
y
x
3
3
y
z
3
= 0.
f ) ln(x) + 6xy
4xy = cos(x).
g) x
d
3
y
dx
3
(
dy
dx
)
4
+ y = 0.
h) (sin())y
(cos())y
= 2.
1.1.0.3. Soluci on
a) Esta ecuacion es ordinaria porque no contiene derivadas parciales. La variable de-
pendiente es y y la independiente x. La ecuaci on es de 3 orden ya que se tiene y
como la mayor derivada, y como es la derivada de mayor orden de exponente 1 el
grado es 1. La ecuacion es lineal.
b) Esta ecuacion es ordinaria porque no contiene derivadas parciales. La variable de-
pendiente es y y la independiente x. La ecuacion es de 2 orden ya que se tiene y
,
y como es la derivada de mayor orden de exponente 1 el grado es 1. La ecuaci on es
lineal.
c) Esta ecuacion es ordinaria porque no contiene derivadas parciales. La variable de-
pendiente es y y la independiente x. La ecuacion es de 2 orden ya que se tiene y
,
y como es la derivada de mayor orden de exponente 1 el grado es 1. La ecuaci on es
no lineal debido al termino y
2
.
d) Esta ecuacion es ordinaria porque no contiene derivadas parciales. La variable de-
pendiente es y y la independiente x. La ecuacion es de 2 orden ya que se tiene
d
2
y/dx
2
, y como es la derivada de mayor orden de exponente 3 el grado es 3. La
ecuaci on es no lineal.
12 CAP
ITULO 1. NOCIONES FUNDAMENTALES
e) Esta ecuaci on es parcial de tercer orden porque contiene tercera derivada parcial.
La variable dependiente es y y la independiente x y z.
1.2. Soluci on de una ecuacion diferencial.
Uno de los objetivos al estudiar una ecuacion diferencial es determinar si esta posee solu-
ci on y, en caso de que tal de que exista, si es unica. A continuaci on daremos la denici on
precisa de lo que entenderemos por soluci on de una ecuaci on diferencial ordinaria.
Denici on 1.24. Una solucion de la ecuaci on diferencial ordinaria
F(x, y, y
, y
, , y
(n)
) = 0, (1.10)
es una funcion y = f(x) denida en un intervalo abierto I, tal que para todo x I
las derivadas f
(x), f
(x), . . . , f
(n)
(x) existen y al reemplazarlas en la ecuaci on (1.10), la
expresi on se convierte en una identidad.
Ejemplo 1.25. Consideremos la ecuacion diferencial
dP
dt
= kP. (1.11)
Vericar que la funcion
P(t) = ce
kt
, < t < , (1.12)
es solucion de la ecuaci on, donde c es una constante arbitraria.
Solucion. Derivando la funci on dada obtenemos P
(t) = cke
kt
= kP(t), que es expresion
en la ecuaci on (1.11).
En el proceso de solucionar una ecuacion diferencial, en alg un momento necesitamos de
la integral indenida (o antiderivada) de alguna funci on. Por ejemplo, para la ecuaci on
dy
dx
= g(x) (1.13)
la solucion tiene la forma
y(x) =
_
g(x)dx + C (1.14)
en alg un intervalo I, donde
_
g(x)dx es cualquier antiderivada de g(x).
1.2. SOLUCI
ON DE UNA ECUACI
ON DIFERENCIAL. 13
Denici on 1.26. Una solucion explcita de la ecuacion diferencial (1.10) es una soluci on
y = f(x), en donde y est a escrita explcitamente en terminos de x, esto es, y se ha
despejado en terminos de x.
Ejemplo 1.27. Vericar que la funci on f(x) = x +e
x
, con dominio toda la recta real
R, dene una soluci on explcita de la ecuaci on diferencial y
+ y = x + 1.
Solucion: Calculando la primera derivada de f(x), obtenemos f
(x) = 1 e
x
. Luego
f
(x) + f(x) = 1 e
x
+ x + e
x
= 1 + x.
Ejemplo 1.28. Verique que para cualquier par de n umeros reales c
1
y c
2
, la funci on
(x) = c
1
e
2x
+ c
2
e
3x
(1.15)
denida en todo R, es una soluci on explcita de la ecuaci on
y
5y
+ 6y = 0. (1.16)
Solucion. Dado que,
(x) = 2c
1
e
2x
+ 3c
2
e
3x
y
(x) = 4c
1
e
2x
+ 9c
2
e
3x
,
entonces
(x) 5
(x) + 6(x) = (4c
1
e
2x
+ 9c
2
e
3x
) 5(2c
1
e
2x
+ 3c
2
e
3x
) + 6(c
1
e
2x
+ c
2
e
3x
)
= e
2x
(4c
1
10c
1
+ 6c
1
) + e
3x
(9c
2
15c
2
+ 6c
2
)
= 0.
Denici on 1.29. Una relaci on g(x, y) = 0 dene una solucion implcita de la ecuaci on
diferencial ordinaria F(x, y, y
, y
, , y
(n)
) = 0 en el intervalo I, si se satisfacen las
siguientes condiciones
a) La relacion g(x, y) = 0 dene implicitamente a y como funci on de x sobre el intervalo
I, es decir, existe una funci on (x) denida sobre I, tal que para todo x I se verica
g(x, (x)) = 0,
14 CAP
ITULO 1. NOCIONES FUNDAMENTALES
b) La funci on (x) es diferenciable en el intervalo I y satisface
F(x, (x),
(x), . . . ,
(n)
(x)) = 0,
para todo x I.
Ejemplo 1.30. Sea C > 0 un n umero real. Vericar que la relaci on
x
2
+ y
2
= C
2
(1.17)
determina una solucion implcita de la ecuacion diferencial
y
dy
dx
+ x = 0 (1.18)
en el intervalo (
C,
C).
Solucion: Diferenciando implicitamente la ecuacion (1.17) obtenemos
2x + 2y
dy
dx
= 0,
de donde, dividiendo todo entre 2, obtenemos la igualdad (1.18). Ahora, despejando y de
la ecuaci on (1.17) obtenemos y =
C x
2
. Consideremos la funcion (x) =
C x
2
denida en el intervalo (
C,
C). Puesto que d/dx = x/
C x
2
para todo x
(
C,
C), sustituyendo en (1.18) obtenemos
C x
2
x
C x
2
+ x = 0.
Luego, la ecuacion (1.17) determina una soluci on implcita de la ecuaci on (1.18).
Ejemplo 1.31. Vericar que la relacion
x
2
y + y
2
C = 0, (1.19)
determina una solucion implcita de la ecuacion diferencial
2xy + (x
2
+ 2y)
dy
dx
= 0. (1.20)
1.3. SOLUCI
ON GENERAL Y PARTICULAR 15
Solucion: El Teorema de la Funcion Implcita garantiza la existencia de una funci on
diferenciable y = f(x) que satisface (1.19). Diferenciando implcitamente la ecuaci on
(1.19) se obtiene
2xy + x
2
dy
dx
+ 2y
dy
dx
= 0,
2xy + (x
2
+ 2y)
dy
dx
= 0,
que es igual a la ecuaci on (1.20). Luego la relacion (1.19) determina una soluci on implcita
de (1.20).
1.3. Soluci on General y Particular
Denici on 1.32. La solucion general de una ecuaci on diferencial es el conjunto de todas
las funciones que verican la ecuacion diferencial.
La soluci on general de una ecuacion diferencial consiste en una familia n-parametrica de
funciones, par ametros que seran las constantes que aparecen al realizar la operacion de
integrar n-veces, siendo n el orden de la ecuaci on. Cuando existe alguna solucion que no
pertenence a dicha familia, entonces esta funcion recibe el nombre de solucion singular.
Denici on 1.33. Se llama solucion particular de la ecuaci on diferencial, a cualquier
funci on que la satisfaga. Esto es, a cualquier elemento del conjunto solucion general. Una
soluci on particular se puede obtener jando valores a los parametros de la familia de
funciones solucion de la ecuacion.
Ejemplo 1.34. Demostrar que la familia de funciones y = ke
2x
2
denidas en todo la
recta real, hacen parte de la soluci on general de la ecuacion diferencial
dy
dx
= 4xy.
Solucion: Derivando la expresi on para y obtenemos y
= 4kxe
2x
2
, es decir, y
= 4xy.
Observacion 1.35. En el ejemplo anterior, la familia de soluciones dada es en realidad la
soluci on general de la ecuaci on diferencial en cuesti on; pero para demostrar esto necesita-
mos de las tecnicas basicas para hallar soluciones de ecuaciones diferenciales ordinarias,
las cuales pospondremos hasta el pr oximo captulo.
16 CAP
ITULO 1. NOCIONES FUNDAMENTALES
Ejemplo 1.36. Demostrar que la funcion y = 3 3e
x
2
/2
es una solucion particular de
la ecuacion diferencial
dy
dx
+ xy = 3x. (1.21)
Solucion: Derivando y obtenemos y
= 3xe
x
2
/2
. Luego,
dy
dx
+ xy = 3xe
x
2
2
+ x(3 3e
x
2
2
) = 3xe
x
2
2
+ 3x 3xe
x
2
2
= 3x.
1.3.0.4. Ejercicios
1. Compruebe que la funci on o familia de funciones indicada es una soluci on explicita
o implicita de la ecuacion diferencial dada.
a) y
3y = 0; y = 2e
3x
.
b) y
+ y = 0; y = c
1
e
x/2
cos(x
3/2) + c
2
e
x/2
sin(x
3/2).
c) y
cos(t) + y sin(t) = 0; y = sin(t) + cos(t).
d) xydx + (x
2
/2 + y)dy = 0; x
2
y + y
2
= k.
e) y
+ y = cot x; y = c
1
cos x + c
2
sin x + sin x ln[(1 cos x)/ sin x].
f ) y
+ y
12y = 0; y = c
1
e
4x
+ c
2
e
3x
.
g) y
+ 2y
+ y = 0; e
y
= c
1
x + c
2
.
h) y
+ (y
)
2
= 0; y = ln |x + c
1
| + c
2
.
i ) x
3
y
+ 2x
2
y
xy
+ y = 12x
2
; y = c
1
x + c
2
x ln |x| + 4x
2
, x > 0.
1.3.0.5. Soluci on
1. En los ejercicios c), d), g) e i), la funci on indicada no es solucion de la ecuaci on
diferencial dada, en los demas casos la funcion indicada si satisface la ecuaci on
diferencial.
1.4. PROBLEMA DE VALOR INICIAL 17
1.4. Problema de Valor Inicial
Denici on 1.37. Una ecuacion diferencial ordinaria de orden n con condiciones iniciales,
es una ecuaci on diferencial de la forma
F
_
x, y,
dy
dx
, . . . ,
d
n1
y
dx
n1
,
d
n
y
dx
n
_
= 0,
para la cual se busca una soluci on denida en un intervalo I sujeta a n condiciones
y(x
0
) = y
0
,
dy
dx
(x
0
) = y
1
, ,
d
n1
y
dx
n1
(x
0
) = y
n1
, (1.22)
en un punto x
0
I y donde y
0
, y
1
, , y
n1
R son constantes dadas.
El conjunto de datos que consta de la ecuaci on diferencial y las n condiciones, recibe el
nombre de Problema de Valor Inicial (PVI) o tambien problema de Cauchy.
Ejemplo 1.38. La ecuacion
dy
dx
+ 4y e
x
= 0, sujeta a las condiciones y(0) =
4
3
,
es un problema con condiciones iniciales.
Ejemplo 1.39. Vericar que y = xe
x
+cx, donde c es una constante arbitraria, propor-
ciona una familia a un parametro, de soluciones implcitas de la ecuaci on
dy
dx
y
x
= xe
x
. (1.23)
Gracar varias de estas curvas soluci on y determinar la soluci on particular que satisfaga
la condicion inicial y(1) = e 1.
Solucion. Derivando y = xe
x
+ cx obtenemos y
= e
x
+ xe
x
+ c. Ahora,
dy
dx
y
x
= e
x
+ xe
x
+ c
(xe
x
+ cx)
x
= e
x
+ xe
x
+ c e
x
c = xe
x
.
En la gura 1.1 se bosquejan algunas curvas solucion de y = xe
x
+ cx.
18 CAP
ITULO 1. NOCIONES FUNDAMENTALES
Por ultimo, se determina c de modo que satisfaga la condicion inicial y(1) = e 1. Al
hacer x = 1 y y = e 1 en la ecuaci on y = xe
x
+ cx se tiene
e 1 = e + c,
por lo que c = 1. As, la solucion del problema con valor inicial es
y = xe
x
x.
Figura 1.1: Algunas curvas soluci on en la familia y = xe
x
+ cx.
1.5. Analisis Cualitativo
1.5.1. Campo de Direcciones
El Teorema de Existencia y Unicidad es de gran utilidad al momento de determinar si
un problema de valor inicial posee soluci on; sin embargo no indica nada acerca de como
computarla y mas a un no indica nada sobre el comportamiento cualitativo de la misma
(en cado de que exista).
En esta secci on describimos algunas pautas para interpretar geometricamente una ecua-
ci on diferencial ordinaria del tipo
dy
dx
= f(x, y). (1.24)
1.5. AN
ALISIS CUALITATIVO 19
Comenzaremos por indicar que si una funcion y = f(x) es una soluci on de la ecuaci on
(1.24) y pasa por el punto (x
0
, y
0
), entonces la pendiente de la recta tangente a la gr aca
de la curva en el punto (x
0
, y
0
) es igual a f(x
0
, y
0
). Como consecuencia, la ecuacion
diferencial (1.24) nos esta dando informaci on sobre el campo de pendientes de las curvas
soluci on en cualquier punto sobre el plano.
Denici on 1.40. La graca de la soluci on de un problema de Cauchy es llamada curva
solucion del problema.
El concepto de curva soluci on sugiere el siguiente metodo gr aco para construir soluciones
aproximadas de una ecuacion diferencial dy/dx = f(x, y).
Denici on 1.41. Dada una ecuaci on diferencial dy/dx = f(x, y), tracemos por cada uno
de los puntos (x, y) un segmento corto de recta que tenga la pendiente m = f(x, y). El
conjunto de todos estos segmentos de rectas se denomina campo de direcciones o campo
de pendientes asociado a la ecuaci on diferencial dada.
1.5.2. Metodo de campos de direcci on
Para conocer el comportamiento geometrico de las soluciones de un problema de valor
inicial dy/dx = f(x, y) sujeto a la condicion y(x
0
) = y
0
, seguimos los siguientes pasos:
Elegimos una colecci on o muestra de puntos en el plano R
2
y dibujamos, para cada
punto (x, y) en la muestra, un segmento de recta que tenga pendiente m = f(x, y)
sobre dicho punto (x, y).
Eligiendo un punto inicial de la muestra, trazamos una curva a partir de dicho
punto, haciendola pasar por otros puntos de la muestra de tal manera que los
segmentos de recta sobre los puntos por los cuales pasa la curva en cuestion, sean
tangentes a la misma.
Ejemplo 1.42. En la Figura 1.2 se muestra la graca del campo de pendientes de la
ecuaci on dy/dx = x + y. En la Figura 1.3 aparece el campo de direcciones de misma
ecuaci on y una solucion que pasa por el punto (1, 2), para la cual la recta tangente a la
graca de la soluci on en dicho punto posee pendiente 3.
El campo de direcciones indica el ujo de las soluciones y, a su vez, facilita el trazo de
cualquier solucion particular.
20 CAP
ITULO 1. NOCIONES FUNDAMENTALES
Figura 1.2: campo de pendientes de la ecuacion dy/dx = x + y.
Figura 1.3: Solucion de la ecuaci on dy/dx = x + y a travez del punto (1, 2).
1.5. AN
ALISIS CUALITATIVO 21
1.5.3. Metodo de Isoclinas
Otro metodo graco para aproximar soluciones de ecuaciones diferenciales es el metodo
de las isoclinas.
Denici on 1.43. Una isoclina
1
de la ecuaci on dy/dx = f(x, y) es una curva de la forma
f(x, y) = c, con c R constante.
La isoclina correspondiente a un valor c R es el conjunto de todos los puntos del
plano en los cuales el campo de pendientes posee la misma inclinaci on.
El metodo de las isoclinas consiste en la aplicaci on de cada uno de los siguientes pasos:
Seleccionamos un conjunto de n umeros reales c.
Para cada n umero real c en el conjunto seleccionado, determine el conjunto f(x, y) =
c. Para tal n, resolvamos la ecuaci on f(x, y) = c para y en terminos de x y c, o en
su defecto, para x en terminos de y y c. De no ser posible ninguno de los dos des-
pejes, identique localmente las curvas denidas de forma implcita por la misma
ecuaci on.
Trazamos segmentos peque nos con pendiente c a lo largo de la isoclina f(x, y) = c.
El segundo paso en el anterior procedimiento genera la isoclina correspondiente a c, o
en otras palabras, el conjunto de todos los puntos en el plano cuyo campo de pendientes
correspondiente tiene una inclinaci on igual a c.
Observacion 1.44. Para tener en cuenta:
1. Si en la ecuaci on diferencial
dy
dx
= f(x, y), la funci on f no depende de y, entonces
las isoclinas son lineas verticales.
2. En general, para el caso en que f(x, y) depende de x e y, las isoclinas pueden ser
cualquier tipo de curva. Por ejemplo si f(x, y) = x
2
2xy
2
4y 3, las is oclinas
de la ecuacion diferencial correspondientes a n umeros reales c > 0, son hiperbolas
con eje transverso horizontal y con centro en (1, 2). Tambien, de los vertices al
centro hay
c unidades y los focos estan ubicados a
2c unidades desde el centro.
Ejemplo 1.45. Consideremos la ecuacion diferencial
dy
dx
= y. (1.25)
Las is oclinas son las rectas y = c , con c un un n umero real cualquiera. La Figura 1.4
muestra las is oclinas de la ecuaci on (1.25) para algunos valores de c. Si trazamos el campo
1
Isoclina signica igual inclinacion o pendiente.
22 CAP
ITULO 1. NOCIONES FUNDAMENTALES
Figura 1.4: Isoclinas de la ecuaci on
dy
dx
= y.
de pendientes de la misma ecuacion, entonces podemos notar en la Figura 1.5, que sobre
las isoclinas el campo de pendientes siempre es el mismo, lo cual coincide con nuestras
observaciones anteriores.
Figura 1.5: Campo de pendientes de la ecuacion
dy
dx
= y.
Por otro lado, la Figura 1.6 nos muestra algunas curvas soluci on de la ecuaci on dife-
rencial.
1.5.4. Lneas de fase
Denici on 1.46. Una ecuacion diferencial ordinaria autonoma es una ecuaci on diferen-
cial ordinaria de primer orden dy/dx = f(x, y) en donde la funci on f(x, y) no depende
de la variable independiente x. Es decir, una EDO de primer orden aut onoma es una
ecuaci on diferencial de la forma dy/dx = f(y).
1.5. AN
ALISIS CUALITATIVO 23
Figura 1.6: Algunas soluciones para
dy
dx
= y.
Observacion 1.47. Supongamos que la funcion y = g(x) denida en un intervalo abierto
I = (a, b), es una soluci on de la ecuacion diferencial autonoma
dy
dx
= f(y). Sea k R un
n umero real arbitrario y consideremos la funcion h(x) = g(x k) denida en el intervalo
abierto J = (a + k, b + k). Sea x
0
I, usando la regla de la cadena obtenemos
dh
dx
|
x
0
+k
=
dg
dx
|
x
0
d
dx
(x k)|
x
0
+k
=
dg
dx
|
x
0
= f(g(x
0
)) = f(h(x
0
+ k));
luego, h tambien es solucion de la ecuacion diferencial
dy
dx
= f(y) en el intervalo J.
Supongamos ahora que g satisface la condici on inicial g(x
0
) = y
0
. Ahora, dada otra
condici on inicial y(u
0
) = v
0
, consideremos k = u
0
x
0
y denamos h(x) = g(x k) +
(v
0
y
0
). El argumento anterior, nos sirve para demostrar que h es soluci on del problema
de valor inicial
dy
dx
= f(y) sujeto a y(u
0
) = v
0
. Luego, aplicando el Teorema Existencia
y Unicidad, obtenemos que h es la unica soluci on de este problema de valor inicial.
Asi, cualquier soluci on de un problema de valores inciales para una ecuaci on diferencial
aut onoma, determina las soluciones para cualquier otro problema de valores iniciales con
la misma ecuacion diferencial.
Ejemplo 1.48. Consideremos la ecuacion diferencial autonoma
dy
dx
= (y 1)(y 2)(y 3). (1.26)
En la Figura 1.7 se trazan algunas curvas solucion de la ecuacion (1.26) y se muestran
algunas caractersticas geometricas de las mismas.
Denici on 1.49. Una solucion de equilibrio o punto de equilibrio de una ecuaci on dife-
rencial ordinaria autonoma dy/dx = f(y) es una soluci on constante de la misma.
24 CAP
ITULO 1. NOCIONES FUNDAMENTALES
[H]
Figura 1.7: Algunas curvas soluci on de la ecuaci on (1.26).
Observacion 1.50. Recordemos que si y = c es una soluci on constante para una ecuacion
diferencial, entonces su derivada es identicamente cero. Luego, para hallar las soluciones
de equilibrio de una ecuaci on diferencial autonoma
dy
dx
= f(y), basta solucionar para y la
ecuaci on f(y) = 0.
Ejemplo 1.51. Para la ecuacion diferencial aut onoma del Ejemplo 1.48, las soluciones
de equilibrio est an dadas por y
1
= 1, y
2
= 2 y y
3
= 3; en la gura 1.7 las lneas continuas
en rojo ilustran estas soluciones de equilibrio.
Observacion 1.52. Note como todas las soluciones y(t) que est an lo sucientemente cerca
al punto de equilibrio y
2
= 2 tiende al mismo cuando x +. Todo lo contrario sucede
con los otros dos puntos de equilibrio y
1
= 1 y y
3
= 3 para los cuales las soluciones
cercanas se alejan de ellos. Se dice entonces que en y
2
= 2 es un punto de equilibrio estable
y que y
1
= 1 y y
3
= 3 son puntos de equilibrio inestables. Los puntos de equilibrio estables
como y
2
= 2 tambien se conocen como pozos, mientras que los puntos de equilibrio como
y
1
= 1 y y
3
= 3, los cuales repelen a todas las soluciones cercanas, se llaman fuentes. Los
puntos de equilibrio que no son ni fuentes ni pozos se denominan nodos.
Observacion 1.53. En la Figura 1.8 gracamos y
= (y1)(y2)(y3) en un plano yy
.
Observemos que para y(t) < 1 se tiene que y
(t) es negativa y creciente (como funcion de
y), luego y(t) es decreciente. De manera an aloga observamos que para las soluciones y(t)
sucientemente cercanas a y = 2 y a la izquierda del mismo punto, y
(t) es decreciente
y positiva; luego y(t) es creciente. De otro lado, para las soluciones y(t) sucientemente
1.5. AN
ALISIS CUALITATIVO 25
[H]
Figura 1.8: An alisis soluciones de equilibrio de la ecuacion (1.26).
cercanas a y = 2 y a la derecha del mismo punto, y
(t) es negativa y creciente; lo cual
indica que y(t) es decreciente. Un an alisis similar es v alido para las soluciones cercanas
al punto de equilibrio y = 3.
Notemos que para tener una descripcion cualitativa de los puntos de equilibrio de una
ecuaci on diferencial aut onoma
dy
dx
= f(y), s olo necesitamos la informaci on relativa al
signo de f(y) cerca de sus ceros. Esto se puede ilustrar geometricamente introduciendo
el concepto de lnea de fase.
Denici on 1.54. La linea de fase asociada a la ecuaci on diferencial aut onoma
dy
dx
= f(y),
es un diagrama que describe el comportamiento geometrico de los puntos de quilibrio de
la misma y el cual se construye de la siguiente forma
Primero debemos cerciorarnos de que la ecuaci on diferencial en cuesti on satisfaga
las condiciones del Teorema Existencia y Unicidad.
Resolver la ecuaci on f(y) = 0, con lo cual estariamos determinando todas las
soluciones de equilibrio de la ecuacion diferencial bajo estudio.
Trazar la recta real y sobre ella marcar todas las soluciones encontradas en el paso
anterior.
Estudiar el signo de la funci on f(y) en los alrededores de los puntos de equilibrio.
Dado un punto de equilibrio y
0
, si g(y) es mayor que cero a la derecha de y
0
(para
valores cercanos a y
0
) trazamos sobre la linea de fase y a la derecha de y
0
, una
peque na echa con direccion hacia y
0
. En caso contrario, trazamos a la derecha de
y
0
una peque na echa, desde y
0
en direccion opuesta al mismo punto.
26 CAP
ITULO 1. NOCIONES FUNDAMENTALES
Repetimos el procedimiento anterior a la izquierda de y
0
y con cada uno de los
dem as puntos de equilibrio de la ecuaci on.
Fuente Pozo Fuente
y
1
y
2
y
3
Figura 1.9: Linea de fase de la ecuacion (1.26).
Ejemplo 1.55. La Figura 1.9 muestra un ejemplo de lnea de fase. Los puntos marcados
sobre la lnea indican los puntos de equilibrio, esto es, puntos y para los cuales f(y) = 0 y
las echas entre ellos ilustran el comportamiento de las soluciones cercanas a los puntos
de equilibrio. Si f(y) es positiva entonces las echas apuntan hacia la derecha y si f(y)
es negativa entonces apuntan hacia la izquierda. Observe que la terminologa empleada
pozo, sumidero o atractor, fuente o repulsor es sugerida por las echas en la lnea fase.
Ejemplo 1.56. Establecer los puntos de equilibrio para la ecuaci on diferencial autonoma
dy
dx
= y
2
7y + 10, (1.27)
determinar su tipo y gracar su lnea fase.
[H]
Figura 1.10: Anlisis soluciones de equilibrio de la ecuacion (1.27).
1.6. GR
AFICAS CON MAPLE Y CALCULADORA 27
[H]
Figura 1.11: Algunas curvas soluci on de la ecuaci on (1.27).
Pozo Fuente
2 5
Figura 1.12: Linea de fase de la ecuacion (1.27).
Solucion: En la Figura 1.10 se muestra la gr aca de f(y). Dado que f(y) = y
2
7y +10
entonces existen dos puntos de equilibrio para la ecuaci on (1.27), y = 2 y y = 5.
Ahora, notemos que para y > 5 y y < 2 la funci on f(y) es positiva y para 2 < y < 5 la
funci on f(y) es negativa. Luego y = 5 es un punto de equilibrio de tipo fuente y y = 2
es un punto de equilibrio de tipo pozo. Con estos datos podemos gracar la lnea de
fase como se muestra en la Figura 1.12. Ademas el diagrama de pendientes y algunas
soluciones aproximadas para esta ecuaci on se muestran en la Figura 1.11.
1.6. Gracas con Maple y Calculadora
Existen una gran variedad de programas computacionales y calculadoras gracadoras,
que permiten la construcci on de los campos pendientes y curvas solucion asociados a una
ecuaci on diferencial.
28 CAP
ITULO 1. NOCIONES FUNDAMENTALES
1.6.1. Uso de calculadora.
A continuacion utilizaremos calculadoras tipo Texas Instruments Voyage 200, TI 89,
Titanium y similares para hacer algunas gra
ficas de campos de pendientes aproximaciones
de curvas soluciones para algunas ecuacines diferenciales.
[H]
Figura 1.13: Vericando el estado de la calculadora.
[H]
Figura 1.14: Ingresando datos en la calculadora.
Antes de proceder, debemos vericar que la calculadora se encuentre en modo Di Equa-
tions (ver gr aca 1.13) . A continuacion, digitamos la ecuacion diferencial en cuestion
teniendo en cuenta que la variable dependiente se escribe siempre como y
1
y la variable
independiente como t, ver graca 1.14.
Ejemplo 1.57. Gr acar con la calculadora el campo de pendientes y una solucion apro-
1.6. GR
AFICAS CON MAPLE Y CALCULADORA 29
ximada de la ecuaci on diferencial
dy
dx
= x
2
y
2
. (1.28)
[H]
Figura 1.15: Gr aca del campo de pendientes y soluci on aproximada de la ecuaci on (1.28).
Una vez que la calculadora este en el modo Di Equatios (Figura 1.13), introducimos la
ecuaci on (1.28) (Figura 1.14). Finalmente, gr acamos los objetos buscados (ver Figura
1.15).
1.6.1.1. Uso del programa Maple.
Para trabajar ecuaciones diferenciales en Maple usamos el paquete el paquete Detools, el
cual se carga con el comando With(DEtools). Para gracar el campo de pendientes de la
ecuaci on diferencial (1.28), se utilizan las siguientes instrucciones:
DEplot(
dy(x)
dx
= x
2
y(x)
2
, y(x), x = 5.,5, y = 5.,5, arrows = LINE),
el resultado generado se ilustra en la Figura 1.16.
La funci on DEplot graca el campo pendientes de una ecuaci on diferencial y tambien
graca una curva solucion cuando se impone una condicion inicial. Por ejemplo
DEplot(
dy(x)
dx
= x
2
y(x)
2
, y(x), x = 5.,5, y = 5.,5, arrows = LINE, (1.29)
[y(0) = 2], [5, 5], [0, 3]);
genera como resultado la Figura 1.17.
30 CAP
ITULO 1. NOCIONES FUNDAMENTALES
[H]
Figura 1.16: Gr aca del campo de pendientes de la ecuacion (1.28) usando Maple.
1.7. El metodo de aproximacion de Euler
Al comienzo de este captulo dijimos que en la mayora de casos no es posible hallar
soluciones explcitas o implcitas de una ecuaci on diferencial. Esto se debe a que mu-
chas veces es imposible hallar antiderivadas explicitas. Como alternativa existen otros
metodos cuantitativos para aproximar las soluciones de una ecuaci on diferencial y mas
concretamente, de problemas con valores iniciales. Estos son procedimientos n umericos
iterativos que, despues de una cantidad nita de pasos, permiten construir con cierto
nivel de exactitud, aproximaciones a la soluci on de un problema con valor inicial.
En esta secci on estudiaremos un primer metodo numerico para aproximar las soluciones
de problemas de valores iniciales de orden 1. El metodo de las tangentes, mejor conocido
como metodo de Euler, hace uso del signicado geometrico de una ecuacion diferencial
ordinaria de orden 1 para aproximar, mediante curvas poligonales, la curva soluci on de
un problema de valores iniciales
dy
dx
= f(x, y), y(x
0
) = y
0
. (1.30)
A continuaci on indicaremos el procedimiento a seguir para usar el metodo de Euler y
luego procederemos a aplicarlo en un par concreto de ejemplos.
1.7. EL M
ETODO DE APROXIMACI
ON DE EULER 31
[H]
Figura 1.17: Gr aca de algunas soluciones de la ecuaci on (1.28) usando Maple.
Supongamos que tenemos y = g
0
(x) una soluci on del problema de valores iniciales (1.30).
Luego, la ecuaci on de la recta tangente a la graca de la curva de y = g
0
(x) en el punto
(x
0
, y
0
) tiene por ecuaci on
y = f(x
0
, y
0
)(x x
0
) + y
0
. (1.31)
Usando nuestros conocimientos en calculo podemos armar que la ecuaci on de la recta
en (1.30) aproxima linealmente la funci on g(x) en un entorno de x
0
.
Consideremos un n umero real positivo jo > 0, el cual denir a el tama no de paso con
el cual seleccionaremos una sucesi on de puntos en el posible intervalo de denici on de la
soluci on g(x). Mas precisamente, dene una sucesi on de puntos
x
1
= x
0
+ , x
2
= x
1
+ , , x
n
= x
n1
+ . (1.32)
Ahora, evaluamos la funci on (1.30) en el punto x
1
para obtener un n umero real y
1
.
Este valor, sirve de aproximacion para g
0
(x
1
), el valor real de la solucion en el punto
x
1
. Obviamente, la precisi on de esta primera aproximaci on depende en gran parte del
tama no de paso elegido.
Repetiremos a continuacion el anterior procedemiento, pero esta vez para el punto obte-
nido (x
1
, y
1
). En efecto, sabemos que el problema de valores iniciales
dy
dx
= f(x, y), y(x
1
) = y
1
, (1.33)
32 CAP
ITULO 1. NOCIONES FUNDAMENTALES
[H]
Figura 1.18:
posee una unica solucion y = g
1
(x). Ahora, la ecuaci on de la recta tangente a la gr aca
de la curva de y = g
1
(x) en el punto (x
1
, y
1
) tiene por ecuaci on
y = f(x
1
, y
1
)(x x
1
) + y
1
, (1.34)
la cual es de nuevo una aproximacion lineal, pero esta vez, para la funcion y = g
1
(x) en un
entorno de x
1
. Evaluando la funcion (1.34) en el punto x
2
, obtenemos una aproximacion
y
2
del valor real g
1
(x
2
) de la soluci on del problema de valores iniciales.
En general, teniendo en cuenta (1.32), obtenemos una sucesi on de puntos
(x
0
, y
0
), (x
1
, y
1
), (x
n
, y
n
), donde x
i
= x
0
+ i y y
i+1
= y
i
+ f(x
i
, y
i
), (1.35)
para i = 1, . . . , n, la cual determina una curva poligonal que sirve de aproximacion para
la curva solucion del problema de valores iniciales (1.30).
Observacion 1.58. Es importante notar que, en el metodo de Euler, realizamos una aproxi-
maci on de la soluci on del problema de valores iniciales (1.30) pasando a otros problemas
de valores iniciales, en los cuales conservamos la ecuaci on diferencial subyacente, pero
modicamos la condici on inicial en cada paso.
1.7. EL M
ETODO DE APROXIMACI
ON DE EULER 33
Ejemplo 1.59. Utilice el metodo de Euler con tama no de paso = 0,1 para aproximar
la solucion del problema con valor inicial
dy
dx
= y(2 y), y(0) = 3. (1.36)
Itere el procedemiento cinco veces.
Solucion: En este caso x
0
= 0, y
0
= 3 y = 0,1, adem as f(x, y) = y(2 y) . Luego,
usando los datos en (1.35), obtenemos
y
n+1
= y
n
+ hf(x
n
, y
n
) = y
n
+ (0,1)y
n
(2 y
n
).
Si comenzamos las iteraciones obtenemos:
x
1
=x
0
+ 0,1 = 0 + 0,1 = 0,1
y
1
=y
0
+ (0,1)y
0
(2 y
0
) = 3 + (0,1)3(2 3) = 2,7
x
2
=x
1
+ 0,1 = 0,1 + 0,1 = 0,2
y
2
=y
1
+ (0,1)y
1
(2 y
1
)
=2,7 + (0,1)(2,7)(2 2,7) = 2,51.
Si continuamos de esta forma, obtenemos los resultados de la tabla 1.1.
C alculos para y
= y(2 y), y(0) = 3
n x
n
y
n
por metodo de Euler
0 0 3
1 0,1 2,7
2 0,2 2,511
3 0,3 2,383
4 0,4 2,292
5 0,5 2,225
Cuadro 1.1: Resultados de aplicar el metodo de Euler al problema de valores iniciales
(1.36).
34 CAP
ITULO 1. NOCIONES FUNDAMENTALES
1.7.0.2. Ejercicios
1. Determine los valores de m tales que la funcion y = x
m
sea una soluci on de la
ecuaci on diferencial dada.
a) x
2
y
+ xy
y = 0.
b) 2x
2
y
3xy
+ 3y = 0.
2. Determine si el Teorema de Existencia y Unicidad garantiza que el problema con
valor inicial tiene una unica solucion.
a)
dy
dx
= x y, y(0) = 4.
b) y
dy
dx
= x + 2, y(2) = 0.
c) y
dy
dx
+ 2x = 0, y(2) = 3.
3. Dada la ecuaci on diferencial
dp
dt
= p(p 2)(4 p)
para la poblaci on p (en miles) de cierta especie en el instante t .
a) Bosqueje el campo de direcciones usando el metodo de is oclinas.
b) Si la poblaci on inicial es 5000 (es decir, p(0) = 5) Que puede decir acerca de
la poblacion lmite lm
t
p(t)?
c) Si p(0) = 1,5 Cual es el valor de lm
t
p(t)?
d) Si p(0) = 0,5 Cual es el valor de lm
t
p(t)?
4. En los siguientes problemas use el campo de direcciones para trazar a mano una
curva soluci on aproximada que pase por los puntos indicados.
a)
dy
dx
=
x
y
1) y(0) = 5
2) y(3) = 3
b)
dy
dx
= (sin(x) cos(y))
1) y(0) = 1
2) y(1) = 0.
1.7. EL M
ETODO DE APROXIMACI
ON DE EULER 35
[H]
Figura 1.19: Ejer 4 a y 4 b.
5. Utlice un bosquejo de la lnea fase para argumentar que cualquier soluci on de la
ecuaci on diferencial
dx
dt
= a bmx; a, b > 0,
tiende a la solucion de equilibrio x(t) a/b cuando t tiende a + es decir, a/b es
un pozo.
6. Utlice un bosquejo de la lnea fase para justicar que cualquier soluci on del modelo
dp
dt
= (a bp)p; p(t
0
) = p
0
,
donde a, b y p
0
son constantes positivas, tienden a la solucion de equilibrio p(t)
a/b cuando t tiende a +.
7. Trace las isoclinas y bosqueje varias curvas soluci on, incluyendo la curva que satis-
faga las condiciones iniciales dadas.
a)
dy
dx
= ln |x| y(1) = 1
b)
dy
dx
=
1
x
y(1) = 1
c)
dy
dx
= x + 2y y(0) = 1
d)
dy
dx
= x
2
y(0) = 1
36 CAP
ITULO 1. NOCIONES FUNDAMENTALES
8. La Integral de Seno. Considere la ecuaci on diferencial y
= g(x) donde:
g(x) =
_
sin(x)
x
si x = 0
1 si x = 0
trace las isoclinas y bosqueje varias curvas soluci on, incluyendo la curva que satisfase
y(0) = 0. Que ocurre con y(x) cuando x ?.
9. Para cada una de las ecuaciones diferenciales, bosqueje la lnea fase, identique las
soluciones de equilibrio y clasique los puntos de equilibrio.
a) y
= y
2
2y + 1.
b) y
= cos(y).
c) y
= (y 2)
4
.
d) y
= y
2
(4 y
2
).
e) y
= 10 + 3y y
2
.
10. Utilizar la lnea fase para predecir el comportamiento asint otico (cuando t +)
de la soluci on que satisfaga la condicion inicial dada.
a) y
= y(y
2
2y + 1), y(0) = 0,5.
b) y
= y(y
2
2y 8), y(0) = 10.
c) y
= cos(y), y(0) = 0.
11. Utilice el metodo de Euler con tama no del paso h = 0,2 para aproximar la soluci on
del problema con valor inicial
y
=
1
y
(x
2
+ x), y(1) = 1
en los puntos X = 1,2; 1,4; 1,6 y 1,8 .
1.7. EL M
ETODO DE APROXIMACI
ON DE EULER 37
1.7.0.3. Soluci on
1. a) 1, 1.
b) 3/2, 1.
2. a) si.
b) no.
c) si.
3. a) Figura 1.21
[H]
Figura 1.20: 3a).
b) 4.
c) 0.
d) 0.
7. gura 1.22
9. a) 1, Nodo.
b) Puntos de equlibrio (2n + 1)/2 con n que pertenece a los n umeros enteros.
Pozo (4k + 1)/2 con k pertenece a los n umeros enteros. Fuente (4k 1)/2
con k pertenece a los n umeros enteros.
c) 2, Nodo.
d) Puntos de equlibrio, 2,0,-2. Pozo 2. Nodo 0. Fuente -2.
e) Puntos de equilibrio -2 y 5. Pozo 5. Fuente -2.
38 CAP
ITULO 1. NOCIONES FUNDAMENTALES
[H]
Figura 1.21: 7a) y 7b)
10. a) 1.
b) innito.
c) /2
11.
C alculos para y
= (x
2
+ x)/y, y(1) = 1
n x
n
Metodo de Euler
1 1,2 1,4
2 1,4 1,77714
3 1,6 2,15528
4 1,8 2,54131
1.7. EL M
ETODO DE APROXIMACI
ON DE EULER 39
[H]
Figura 1.22: 7c) y 7d)
40 CAP
ITULO 1. NOCIONES FUNDAMENTALES
Captulo 2
Ecuaciones Diferenciales de Primer
Orden
En este captulo se describen varios metodos de soluciones de ciertos tipos de ecuaciones
de primer orden.
2.1. Ecuaciones Separables
La ecuacion diferencial de primer orden
dy
dx
= r(x, y) (2.1)
se denomina separable si la funci on r(x, y) se puede expresar de la forma r(x, y) =
f(x) g(y), donde f es una funci on en terminos de x y g es una funci on en y:
dy
dx
= f(x) g(y)
a veces por comodidad
dy
dx
=
f(x)
p(y)
con g(y) = 1/p(y). Para resolver esta ecuacion diferencial se separan las funciones f y g
como
p(y)
dy
dx
= f(x)
41
42 CAP
ITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
y se integra ambos lados con respecto a x, es decir
_
p(y)
dy
dx
dx =
_
f(x)dx
o
_
p(y)dy =
_
f(x)dx
Ejemplo 2.1. Resolver la ecuacion.
dy
dx
= x + 2
Solucion. Si integramos ambos lados de la ecuacion con respecto a la variable indepen-
diente x, es decir
_
dy
dx
dx =
_
(x + 2)dx
es decir,
_
dy =
_
(x + 2)dx.
Evaluando las integrales se obtiene
y =
x
2
2
+ 2x + c
donde c es una constante arbitraria.
La ultima expresi on constituye una familia de curvas parab olicas, cuyo graco es la gura
2.1
Ejemplo 2.2. Resolver la ecuacion.
dy
dx
=
sec
2
y
1 + x
2
2.1. ECUACIONES SEPARABLES 43
[H]
Figura 2.1: Familia de curvas de y =
x
2
2
+ 2x + c
Solucion. Si reescribimos la ecuaci on en la forma
1
sec
2
y
dy
dx
=
1
1 + x
2
e integramos ambos lados de la ecuacion con respecto a la variable independiente x, es
decir
_
1
sec
2
y
dy
dx
dx =
_
1
1 + x
2
dx
o
_
dy
sec
2
y
=
_
dx
1 + x
2
.
Evaluando las integrales se obtiene
y
2
+
sin(2y)
4
=arctan(x) + c
2y + sin(2y) =4 arctan(x) + c
donde c es una constante arbitraria.
44 CAP
ITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Ejemplo 2.3. Resolver el problema de valor inicial
dy
dx
= x
3
(1 y), y(0) = 3.
Solucion. Al separar e integrar tenemos
dy
1 y
=x
3
dx
_
dy
y 1
=
_
x
3
dx
ln(y 1) =
x
4
4
+ c.
despejamos a ambos lados y tenemos:
y 1 = e
x
4
4
e
c
.
Despejando y se tiene y(x) = 1 +e
x
4
4
k, donde por simplicidad en la presentaci on hemos
denido k = e
c
.
Empleando la condicion inicial y(0) = 3 obtenemos k = 2, de este modo la soluci on es:
y(x) = 1 + 2e
x
4
4
.
2.1.1. Ejercicios
1. Encontrar La soluci on general de las siguientes ecuaciones diferenciales, por varia-
bles separables:
a)
dy
dx
=
y
x
.
b) (1 y
2
)dx xydy = 0.
c) (y + 1)dx + (y 1)(1 + x
2
)dy.
d) (2x + 1)y
+ y
2
= 0.
e) y
x
3
= x
3
y.
f ) xy
2
dy + (x
2
+ 1)dx.
g) xy
2
+
1 + x
2
y
= 0.
2.1. ECUACIONES SEPARABLES 45
h) xy
2
dx + xdy = 0.
i )
dy
dx
= 1 + x + y + xy.
j ) x
2 dy
dx
= 1 x
2
+ y
2
x
2
y
2
.
2. Resuelva el problema de valor inicial respectivo.
a)
dy
dx
= 4(x
2
+ 1); y(0) = 1.
b)
dy
dx
=
y
2
1
x
2
1
; y(2) = 2.
c) x
2 dy
dx
= y xy; y(1) = 1.
d)
dy
dx
= 3x
2
(y
2
+ 1); y(0) = 1.
e) 2y
dy
dx
=
x
x
2
16
; y(5) = 2.
f ) tan x
dy
dx
= y; y
_
2
_
=
2
.
g)
dy
dx
= 2xy
2
+ 3x
2
y
2
; y(1) = 1.
3. Hallar todas las funciones f(x) tales que su derivada es el cuadrado de la funci on.
2.1.2. Soluci on
1. a) y = cx.
b) c = x
2
(1 y
2
).
c) tan
1
x + c = y + 2 ln |y + 1|.
d) y =
2
ln |2x+1|+c
.
e) y = ce
x
4
/4
1.
f) y
3
=
3
2
x
2
3 ln |x| + c.
g) y =
1
1+x
2
+c
.
h) y =
1
x+c
.
i) y = tan(
x
2
+1+cx
x
).
2. a) y =
4
3
x
3
+ 4x + 1.
b) y = x.
c) y =
e
1/x
e
x
.
d) y = tan(
4
+ x
3
).
46 CAP
ITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
e) y =
x
2
16(x
2
16+
x
2
16)
x
2
16
.
f) y =
1
2
sen(x).
g) y =
1
1+x
2
+x
3
.
3. f(x) =
1
x+c
, y = 0
2.2. Ecuaciones exactas
Denici on 2.4. Una ecuacion diferencial de la forma
M(x, y)dx + N(x, y)dy = 0 (2.2)
es exacta si existe una funcion F(x, y) de dos variables con derivadas parciales continuas
hasta de segundo orden en un dominio , tal que:
dF(x, y) = M(x, y)dx + N(x, y)dy.
En este caso se tendra que
F
x
= M(x; y),
F
y
= N(x; y)
2.2.1. Soluci on de una ecuacion diferencial exacta
Si la ecuaci on M(x, y)dx +N(x, y)dy = 0 es exacta entonces podemos encontrar F(x, y)
tal que:
dF = M(x, y)dx + N(x, y)dy = 0
es decir F(x, y) = k, k R.
De esta forma una vez encontrada F, la soluci on de la ecuaci on es F(x, y) = k.
Teorema 2.5 (Criterio para exactitud de una ecuaci on diferencial.). Sean M(x, y) y
N(x, y) funciones continuas y con derivadas parciales de primer orden continuas en
una region rectangular R denida por a < x < b, c < y < d. La ecuacion diferencial
M(x, y)dx + N(x, y)dy = 0 es exacta si y solamente si:
M
y
=
N
x
.
2.2. ECUACIONES EXACTAS 47
Demostracion: La demostracion es en dos partes.
1. Supongamos que la ecuaci on es exacta: entonces existira una funcion F(x, y) tal
que:
F
x
= M(x, y),
F
y
= N(x, y).
Derivando en estas igualdades respecto de x y y respectivamente, se tiene:
2
F
xy
=
M
y
,
2
F
yx
=
N
x
.
Puesto que M/y y N/x son continuas, por lo tanto,
2
F/xy y
2
F/yx
son tambien continuas. Esto garantiza la igualdad
M
y
=
N
x
. (2.3)
2. Ahora mostramos que si M y N satisfacen la ecuacion (2.3) entonces la ecuaci on
M(x, y)dx+N(x, y)dy = 0 es exacta. Para la demostracion se quiere determinar la
existencia de una funci on F(x, y) tal que dF = Mdx +Ndy. Si esta funcion existe,
debe vericar que:
F
x
= M(x, y),
F
y
= N(x, y).
Integrando la primera ecuaci on con respecto a x, y manteniendo a y como constante,
se obtiene que
F(x, y) =
_
M(x, y)dx + g(y) (2.4)
en donde la funcion arbitraria g(y) es la constante de integraci on. Ahora debemos
determinar g(y). Para ello utilizaremos (2.4) y lo derivamos con respecto a y
F
y
=
_ _
M(x, y)dx
y
_
+
dg(y)
dy
.
Como F/y = N(x, y) y despejando g
(y) se tiene
48 CAP
ITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
g
(y) = N(x, y)
_ _
M(x, y)dx
y
_
. (2.5)
Para determinar g(y) es importante que el lado derecho de la ecuacion (2.5) sea una
funci on que depende solamente de y. Para establecer este hecho derivamos (2.5) con
respecto a x, obteniendo as
N(x, y)
x
M(x, y)
y
.
Por la ecuacion (2.3) esta expresi on es cero, por lo tanto el lado derecho de (2.5) no
depende de x, integrando (2.5) y sustituyendo g(y) en (2.4), se obtiene la soluci on
de la ecuaci on (2.2)
F(x, y) =
_
M(x, y)dx +
_ _
N(x, y)
(
_
M(x, y)dx)
y
_
dy
Este es el metodo que se emplea para determinar F(x, y) y es indiferente empezar el
c alculo de esta manera o bien con:
_
N(x, y)dy + g(x)
Siguiendo un procedimiento analogo al expuesto anteriormente, pero intercambiando
variables.
Para solucionar una ecuacion diferencial exacta se seguir an los pasos indicados en la
demostraci on anterior, donde se ha establecido c omo encontrar la funci on F(x, y).
Note que la ecuacion de variables separables
dy
dx
=
f(x)
p(y
,
Se puede escribir en forma equivalente como
p(y)dy f(x)dx = 0
la cual es exacta, como se ve f acilmente.
2.2. ECUACIONES EXACTAS 49
Ejemplo 2.6. Resolver el problema de valor inicial
(e
x
y + xe
x
y)dx + (xe
x
+ 2)dy = 0, y(0) = 1. (2.6)
Solucion. En este caso M(x, y) = e
x
y + xe
x
y, y N(x, y) = xe
x
+ 2 como
M
y
= e
x
+ xe
x
=
N
x
se tiene la ecuacion es exacta. Para determinar F(x, y), comenzamos integrando con
respecto a x
F
x
=M(x, y) = e
x
y + xe
x
y
F(x, y) =
_
(e
x
y + xe
x
y)dx + g(y)
F(x, y) =xe
x
y + g(y). (2.7)
Derivando parcialmente con respecto a y y sustituimos xe
x
+2 en vez de N(x, y), ya que
F/y = N(x, y):
F
y
=xe
x
+ g
(y)
xe
x
+ 2 =xe
x
+ g
(y)
2 =g
(y).
As, 2 = g
(y), y g(y) = 2y. La constante de integraci on se puede omitir ya que cualquier
soluci on de la ecuacion diferencial se satisface. Por tanto, sustituyendo g(y) en (2.7)
tenemos
F(x, y) = xe
x
y + 2y.
Es decir, la soluci on de la ecuacion diferencial (2.6) esta dada por
xe
x
y + 2y = k.
Alternativamente, se puede integrar simult aneamente las dos funciones
M(x, y) = e
x
y + xe
x
y, y N(x, y) = xe
x
+ 2
50 CAP
ITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
y compararlas para determinar unvocamente F(x, y), salvo una constante. As
F(x, y) =
_
M(x, y)dx =
_
(e
x
y + xe
x
y)dx
=e
x
y + +(xe
x
e
x
)y = xye
x
,
por otro lado,
F(x, y) =
_
N(x, y)dy =
_
(e
x
x + 2)dy
=(e
x
x + 2)y = xye
x
+ 2y.
Comparando (tomando los terminos comunes una vez y los no comunes), obtenemos
F(x, y) = xye
x
+ 2y. Y la soluci on de la ecuacion est a dada de manera explcita por
K =xe
x
y + 2y
y =
k
xe
x
+ 2
,
con la condici on inicial, en esta ecuaci on, cuando x = 0, y = 1 obtenemos k = 2. De
esta manera la soluci on es:
y =
2
xe
x
+ 2
.
Ejemplo 2.7. Resolver la ecuacion
(y sin(xy) + x
2
)dx + (x sin(xy) + y
2
)dy = 0, y(0) = 1.
Solucion. En este caso M(x, y) = y sin(xy) + x
2
, y N(x, y) = x sin(xy) + y
2
, calculamos
M
y
y
N
x
y encontramos que
M
y
= sin(xy) + xy cos(xy) =
N
x
2.2. ECUACIONES EXACTAS 51
luego la ecuaci on es exacta. Para determinar F(x, y), comenzamos integrando M con
respecto a x
F
y
=M(x, y) = y sin(xy) + x
2
F(x, y) =
_
(y sin(xy) + x
2
)dx + g(y)
F(x, y) =cos(xy) +
x
3
3
+ g(y).
Ahora derivamos parcialmente F con respecto a y y sustituimos x sin(xy) + y
2
en lugar
de N(x, y) ya que F/y = N(x, y):
F
y
=x sin(xy) + g
(y)
x sin(xy) + y
2
=x sin(xy) + g
(y)
y
2
=g
(y).
As
g(y) =
_
y
2
dy =
y
3
3
,
podemos considerar que g(y) = y
3
/3. Por tanto,
F(x, y) = cos(xy) +
x
3
3
+
y
3
3
es decir
k = cos(xy) +
x
3
3
+
y
3
3
.
2.2.2. Ejercicios
1. Determine si la ecuacion es exacta. Si lo es, resuelvala.
a) x
2
dy + 2xydx = x
2
dx.
b) (y
2
2x)dx + 2xydy = 0.
52 CAP
ITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
c)
_
1
x
+ 2y
2
x
_
dx + (2yx
2
cos(y)dy = 0.
d) (y
2
sin(x))dx +
_
1
x
y
x
_
dy = 0.
e) (tan |y| 2)dx +
_
x sec
2
(y)
1
y
_
dy = 0.
f )
_
2x
y
3y
2
x
4
_
dx +
_
2y
x
3
x
2
y
2
+
1
y
_
dy = 0.
g) (e
x
sin(y) + tan(y))dx + (e
x
cos(y) + x sec
2
(y))dy = 0.
h) (cos(x) + ln(y))dx +
_
x
y
+ e
y
_
dy = 0.
i ) (1 + ye
xy
)dx + (2y + xe
xy
)dy = 0.
2. Muestre que cualquier ecuacion de la forma
f(x)dx + g(y)dy = 0
es exacta.
3. Resuelva el problema de valor inicial respectivo.
a) (4x
3
y
2
6x
2
y 2x 3)dx + (2x
4
y 2x
3
)dy = 0, y(1) = 3.
b) (4y cos(x) +4 cos(x) sin(x) +sec
2
(x))dx+(4y 4 sin(x))dy = 0, y
_
4
_
= 0.
c) (y
3
x)e
x
dx + 3y
2
(e
x
+ y)dy = 0, y(0) = 0.
d) (sin(x) y sin(x))dx + (cos(x) + y)dy = 0, y(0) = 1.
4. Determine la funci on m as general M(x, y) de modo que la ecuaci on sea exacta:
a) M(x, y)dx +
_
sec
2
(y)
x
y
2
_
dy = 0.
b) M(x, y)dx + (x
3
y
3
)dy = 0.
c) M(x, y)dx + (e
2x
e
y
sin(x))dy = 0.
5. Determine la funci on m as general N(x, y) de modo que la ecuaci on sea exacta:
a) (x
2
y
3
3xy + 2y
2
)dx + N(x, y)dy = 0.
b) (y sin(x) + x sin(y))dx + N(x, y)dy.
6. Encuentre condiciones para las constantes A, B, C y D tales que la ecuaci on
(Ax + By)dx + (Cx + Dy)dy = 0
sea exacta.
7. Muestre que la ecuaci on y
+y = 0 es exacta si la multiplicamos por e
x
y solucionela.
2.3. FACTOR INTEGRANTE 53
2.2.3. Soluci on
1. a) k = x
2
y
y
3
3
.
b) k = y
2
x x
2
.
c) x
2
y
2
ln |x| + sin(y) = c.
d) No es exacta.
e) c = x tan y 2x ln |y|.
f ) k =
x
2
y
+
y
2
x
3
.
g) k = e
x
sin(y) + x tan y.
h) k = e
x
sin(y) + x tan y + e
y
.
i ) k = x + e
xy
+ y
2
.
3. a) 1 = x
4
y
2
2x
3
y x
2
3x.
b) 0 = 4y sin(x) 2 cos
2
(x) + tan(x) + 2y
2
.
c) 1 = y
3
e
x
xe
x
+ e
x
+
3
4
y
4
.
d)
1
2
= cos(x) + y cos(x) +
y
2
2
.
4. a)
1
y
.
b) 3x
2
y.
c) 2e
2x
y.
5. a) x
3
y
2
3
2
x
2
+ 4xy.
b) cos(x) +
x
2
2
cos(y).
6. B = C, A y D cualquier n umero real.
7. y = ce
x
.
2.3. Factor integrante
Algunas ecuaciones diferenciales que no son exactas pueden ser transformadas en es-
tas mediante una funci on que multiplicada a la ecuaci on original, la transforma en una
ecuaci on diferencial exacta. Estas funciones reciben el nombre de factores integrantes.
54 CAP
ITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
2.3.0.1. Metodo para hallar factores integrantes especiales
Si
M(x, y)dx + N(x, y)dy = 0 (2.8)
Una ecuaci on que no es exacta, pero si la multiplicamos por una funci on (x, y) adecuada
que haga que la ecuaci on resultante: (x, y)M(x, y)dx+(x, y)N(x, y)dy = 0 sea exacta,
se denomina un factor de integracion para la ecuacion. Para determinar la funcion
(x, y) vericamos el criterio de exactitud en la ecuaci on transformada:
_
(x, y)M(x, y)
y
=
_
(x, y)N(x, y)
x
al usar la regla del producto, esto se reduce a la ecuaci on
M
y
N
x
=
_
N
x
M
y
_
. (2.9)
Por facilidad, consideraremos que depende de una sola variable. En este caso, supone-
mos que depende de x, es decir = (x), de tal forma que la ecuaci on (2.9) se reduce a
la ecuacion separable
x
=
_
M
y
N
x
N
_
donde
M
y
N
x
N
depende solo de x. Entonces el factor integrante para (2,8) es:
(x) = exp
_
_ _
M
y
N
x
N
_
dx
_
.
Ahora, supongamos que la ecuacion (2.8) tiene un factor integrante que s olo depende de
y, es decir = (y), en este caso la ecuaci on (2.9) se reduce a la ecuaci on separable
y
=
_
N
x
M
Y
M
_
donde
N
x
M
y
M
2.3. FACTOR INTEGRANTE 55
s olo depende de y. Entonces el factor integrante para (2.8) es:
(y) = exp
_
_ _
N
x
M
y
M
_
dy
_
.
Ejemplo 2.8. Resolver la ecuacion diferencial
(2y
2
+ 2y + 4x
2
)dx + (2xy + x)dy = 0. (2.10)
Solucion. N otese que la ecuacion diferencial no es de variables separables. Determinamos
si es exacta:
M
y
= 4y + 2
N
x
= 2y + 1,
como
M
y
=
N
x
entoncesla ecuaci on diferencial no es exacta. Calculamos
M
y
N
x
N
=
4y + 2 2y 1
2xy + x
=
2y + 1
x(2y + 1)
=
1
x
,
obtenemos una funci on que s olo depende de x, de modo que el factor integrante es el de
la formula:
(x) =exp
_
_ _
M
y
N
x
N
_
dx
_
(x) =exp
_
_ _
1
x
_
dx
_
= x.
Al multiplicar la ecuaci on (2.10) por (x) = x, obtenemos la ecuaci on exacta
(2xy
2
+ 2xy + 4x
3
)dx + (2x
2
y + x
2
)dy = 0.
En este caso M(x, y) = 2xy
2
+ 2xy + 4x
3
, y N(x, y) = 2x
2
y + x
2
, calculamos
M
y
y
N
x
56 CAP
ITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
y encontramos que
M
y
= 4xy + 2x =
N
x
as tenemos en efecto que la ecuaci on es exacta. Para determinar F(x, y), comenzamos
integrando M con respecto a x
F
y
=M(x, y) = 2xy
2
+ 2xy + 4x
3
F(x, y) =
_
(2xy
2
+ 2xy + 4x
3
)dx + g(y)
F(x, y) =x
2
y
2
+ x
2
y + x
4
+ g(y).
Ahora derivamos parcialmente F con respecto a y y sustituimos 2x
2
y + x
2
en lugar de
N(x, y) ya que F/y = N(x, y):
F
y
=2x
2
y + x
2
+ g
(y)
2x
2
y + x
2
=2x
2
y + x
2
+ g
(y)
0 =g
(y).
As
g(y) = c,
podemos considerar que g(y) = c. Por tanto
F(x, y) = x
2
y
2
+ x
2
y + x
4
es decir
k = x
2
y
2
+ x
2
y + x
4
.
2.3.1. Ejercicios
1. Encontrar el factor integrante y resolver las siguientes ecuaciones diferenciales:
a) 2xy
2
dx + 3x
2
ydy = 0.
b) (x y)dx + xdy = 0.
2.3. FACTOR INTEGRANTE 57
c) (2y
3
+ 6xy
2
)dx + (3xy
2
+ 4x
2
y)dy = 0.
d) (y
2
+ 2xy)dx x
2
dy = 0.
e) (x
2
y + 4xy + 2y)dx + (x
2
+ x)dy = 0.
f ) (y ln |y| + ye
x
)dx + (x + y cos(y))dy = 0.
2. Muestre que si (N/x M/y)/(xM yN) s olo depende del producto xy, es
decir
(N/x M/y)
(xM yN)
= H(xy)
entonces la ecuacion M(x, y)dx + N(x, y)dy = 0 tiene un factor integrante de la
forma (xy). Proporcione la f ormula general para (xy).
3. Encontrar el factor integrante (xy) y resolver las siguientes ecuaciones diferencia-
les:
a) ydx + (x 3x
2
y
2
)dy = 0.
b) ydx + (x 3x
3
y
2
)dy = 0.
c) y(x
2
y
2
+ xy)dx + x(x
2
y
2
1)dy = 0.
4. Suponga que a, b, c y d son constantes tales que ad bc = 0, y sean m y n n umeros
reales arbitrarios. Demuestre que
(ax
m
y + by
n+1
)dx + (cx
m+1
+ dxy
n
)dy = 0
tiene un factor integrante de la forma (x, y) = x
5. Determine el factor integrante (x, y) = x
y resolver las siguientes ecuaciones
diferenciales:
a) (
x
y
2
1
xy
)dx
1
y
2
dy = 0.
b) (12 + 5xy)dx + (6x/y + 2x
2
)dy = 0.
c) 2
y
x
dx + (
y
2
x
2
1)dy = 0.
58 CAP
ITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
2.3.2. Soluci on
1. a) (x) = x
2/3
, y =
1
2
e
x
+ ce
x
.
b) (x) = x
2
, y = x
2
1 + ce
x
2
.
c) (x) = x, e
x
(x 1)y = x + c.
d) (y) = y
2
, c = x + x
2
y
1
.
e) (x) = xe
x
, y =
c
e
x
(x
2
+x
3
)
.
f ) (y) =
1
y
, x ln |y| + e
x
sin(y) = c.
3. a) (xy) =
1
x
2
y
2
,
1
xy
3y = c.
b) (xy) =
1
x
3
y
3
,
1
2x
2
y
2
3 ln |y| = c.
c) (xy) =
1
xy(xy+1)
, xy ln |y| = c.
5. a) (x, y) = xy
2
, xy
1
3
x
3
= c.
b) (y) = x
7
y
3
, 2x
6
y
3
x
5
y
2
= c.
c) (x, y) = x
2
y
2
,
x
2
y
+ y = c.
2.4. Ecuaciones diferenciales lineales
Una ecuacion diferencial lineal de primer orden es una ecuaci on de la forma:
a
1
(x)
dy
dx
+ a
0
(x)y = g(x), a
1
(x) = 0 (2.11)
por lo tanto
dy
dx
+
a
0
(x)
a
1
(x)
y =
g(x)
a
1
(x)
.
Si denimos
P(x) =
a
0
(x)
a
1
(x)
y Q(x) =
g(x)
a
1
(x)
entonces la ecuacion diferencial lineal toma la forma
dy
dx
+ P(x)y = Q(x). (2.12)
2.4. ECUACIONES DIFERENCIALES LINEALES 59
Notamos que la ecuaci on (2.12) no es de variables separables ni exacta. Ahora se trata
de encontrar un factor integrante de la forma (x). Asumimos que las funciones P y Q
son continuas en alg un intervalo I. Luego multiplicamos por (x) la ecuaci on (2.12)
(x)
dy
dx
+ (x)P(x)y = (x)Q(x) (2.13)
_
(x)P(x)y (x)Q(x)
dx +
_
(x)
dy = 0.
Sea M(x, y) = (x)P(x)y (x)Q(x) y N(x, y) = (x).
Para que sea exacta se debe tener que
M
y
=
N
x
(x)P(x) =
(x)
1
(x)
d(x) =P(x)dx
Al integrar ambos lados tenemos el factor integrante
(x) = e
P(x)dx
. (2.14)
Como se acaba de ver
(x)P(x) =
(x)
con esto la ecuaci on diferencial (2.13) se convierte en:
(x)
dy
dx
+
d(x)
dx
y = (x)Q(x)
d
_
(x)y
dx
= (x)Q(x)
integrando ambos lados de la ecuacion tenemos (x)y =
_
(x)Q(x)dx + c. Despejando
y(x) obtenemos.
y(x) =
1
(x)
__
(x)Q(x)dx + c
_
(2.15)
donde (2,15) es la solucion general de la ecuaci on lineal (2.12).
En resumen, la soluci on de la ecuacion lineal (estandar)
dy
dx
+ P(x)y = Q(x)
60 CAP
ITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
siendo P y Q continuas en alg un intervalo I R, esta dada por
y(x) =
1
(x)
__
(x)Q(x)dx + c
_
.
Donde
(x) = e
P(x)dx
es el factor integrante de la ecuacion lineal. Notese, por que la necesidad de que P y Q
sean continuas (condici on suciente para que las integrales existan).
Ejemplo 2.9. Resolver
x
dy
dx
+ 2y =
1
x
3
, x = 0.
Solucion. Para poder escribir la forma general de la ecuaci on diferencial lineal, dividimos
por x, ya que x = 0, y obtenemos:
dy
dx
+ 2
y
x
=
1
x
4
dy
dx
+
2
x
y =
1
x
4
.
Donde vemos que
P(x) =
2
x
y Q(x) =
1
x
4
,
entonces podemos hallar el factor integrante sustituyendo en la formula (2.14)
(x) = e
2
x
dx
= e
2 ln(x)
= x
2
y reemplazando en la ecuaci on (2.15) tenemos
y(x) =
1
x
2
_
_
x
2
1
x
4
dx + c
_
y(x) =
1
x
2
_
_
1
x
2
dx + c
_
y(x) =
1
x
3
+
c
x
2
2.4. ECUACIONES DIFERENCIALES LINEALES 61
2.4.1. Ejercicios
1. Resolver las siguientes ecuaciones diferenciales, lineales:
a) y
2y = 3e
2x
y(0) = 0.
b) xy
+ 2y = 3x y(1) = 5.
c) 3xy
+ y = 12x.
d) xy
3y = x
3
y(1) = 10.
e) y
= (1 y) cos(x) y(0) = 1.
f ) y
= 1 + x + y + xy y(0) = 0.
2. Resuelva las ecuaciones diferenciales considerando a y como la variable indepen-
diente en lugar de x.
a) (1 4xy
2
)
dy
dx
= y
3
.
b) (x + ye
y
)
dy
dx
= 1.
c) (1 + 2xy)
dy
dx
= 1 + y
2
.
3. Sea y
0
una soluci on distinta de cero de y
+ p(x)y = 0, y y
1
es una soluci on de
y
+ p(x)y = q(x).
a) Muestre por sustitucion que y
1
+cy
0
es una soluci on de y
+p(x)y = q(x) para
todo n umero c.
b) Muestre que toda solucion y de y
+ p(x)y = q(x) puede ser escrita como
y = y
1
+ cy
0
para alg un c.
4. Sean y
1
y y
2
soluciones distintas de y
+ p(x)y = q(x), y sea y
0
= y
1
y
2
.
a) muestre que y
0
es solucion de de y
+ p(x)y = 0.
b) Escriba toda solucion de y
+ p(x)y = q(x) en terminos de y
1
y y
2
.
5. Verique que las funciones dadas para cada numeral son soluciones de la ecuacion
diferencial y escriba la solucion general por el metodo del ejercicio 4.
a) 1 e
x
, 1 + 2e
x
; y
+ y = 1.
b) x 1/x, x + 1/x; y
+ (1/x)y = 2.
c) x, x
2
; (x
2
x)y
+ (1 2x)y = x
2
.
62 CAP
ITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
2.4.2. Soluci on
1. a) y(x) = 3e
2x
x.
b) y(x) = x +
4
x
2
.
c) y(x) = 3x +
C
x
1/3
.
d) y(x) =
_
1
2
x
2
+
19
2
_
x.
e) y(x) = 1.
f ) y(x) = 1 + e
1
2
x(x+2)
.
2. a) x(y) =
_
y
2(1+y
2
)
+
1
2
arctan(y) + c
_
(1 + y
2
).
b) x(y) =
_
1
2
y
2
+ c
_
e
y
.
c) x(y) =
(1/2)y
2
+C
y
4
.
4. b. y = y
1
+ c(y
1
y
2
).
5. a) y = 1 + ce
x
.
b) y = x + c/x.
c) y = c + c(x
2
x).
2.5. Soluciones por Sustituciones
Para resolver una ecuaci on diferencial, primero identicamos que tipo de ecuaci on es. En
algunos casos es posible hacer una sustitucion para transformar la ecuaci on en una de un
tipo conocido.
2.5.1. Ecuaciones Diferenciales Homogeneas
Se puede cambiar la forma de una ecuacion diferencial de la siguiente manera. Sea y
cualquier solucion de la ecuacion
y
= F(x, y) (2.16)
se introduce una nueva funci on (desconocida) u tal que y(x) = g(u(x)), y u debe satisfacer
la nueva ecuaci on
g
(u)u
= F(x, g(u)). (2.17)
2.5. SOLUCIONES POR SUSTITUCIONES 63
A la inversa, si u satisface (2.17), entonces satisface (2.16). Este proceso tiene sentido si
la ecuaci on resultante es mas sencilla de resolver que la inicial. La sustitucion que se va
a utilizar es y = ux, y convierte la ecuaci on en variables separables.
Una funci on F de dos variables F(x, y) es homogenea (de grado cero) si y solo si
F(tx, ty) = F(x, y) para todo n umero x, y, t. En este caso, para t =
1
y
, asumiendo y = 0,
se tendr a F(x, y) = F(
x
y
, 1), es decir, la funcion puede asumirse como una funci on que
depende solamente de la variable
x
y
.
Denici on 2.10. La ecuacion
dy
dx
= r(x, y) (2.18)
es homogenea si r(x, y) es una funci on que solo depende de
y
x
. En este caso la ecuacion
(2.18) toma la forma
dy
dx
= r
_
1,
y
x
_
.
Ejemplo 2.11. Determinar si la ecuaci on
(y
3
xy
2
)dx + 2x
2
ydy = 0
es homogenea.
Solucion. Escribimos la ecuaci on en la forma
dy
dx
=
xy
2
y
3
2x
2
y
dy
dx
=
xy
2
2x
2
y
y
3
2x
2
y
dy
dx
=
y
2x
y
2
2x
2
dy
dx
=
1
2
y
x
1
2
_
y
x
_
2
vemos que el lado derecho s olo depende de
y
x
es decir la ecuaci on es homogenea.
Para resolver una ecuaci on homogenea hacemos la sustituci on u =
y
x
de tal manera que si
derivamos con respecto a x obtenemos
dy
dx
= u +x
du
dx
entonces sustituimos en la ecuaci on
(2,18) para obtener
u + x
du
dx
= r(1, u). (2.19)
64 CAP
ITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
La nueva ecuaci on es de variables separables x y u,una vez resuelta reemplazamos u por
y
x
para dejar la soluci on en terminos de las variables originales.
Ejemplo 2.12. Resolver
(y
3
xy
2
)dx + 2x
2
ydy = 0.
Solucion. Como vimos en el ejemplo anterior esta ecuaci on es homogenea, ahora hacemos
la sustitucion u =
y
x
y
dy
dx
= u + x
du
dx
.
Y as:
dy
dx
=
1
2
y
x
1
2
_
y
x
_
2
u + x
du
dx
=
1
2
u
1
2
u
2
.
La ecuacion anterior es separable. Por tanto obtenemos,
_
2
u + u
2
du =
_
dx
x
2
_
ln(u)ln(u + 1)
_
= ln(x) + c.
Ahora reemplazando u =
y
x
tenemos
2 ln
_
y
x
_
+ 2 ln
_
y + x
x
_
= ln(x) + c
la solucion en forma implcita de la ecuaci on.
2.5.2. Ecuaciones con coecientes lineales
Hemos utilizado sustituciones de y que transforman la ecuaci on diferencial para poder
resolverla, pero en algunos casos se necesita sustituir x y y en nuevas variables. Este es
el caso para los coecientes lineales.
Sea la ecuaci on
(a
1
x + b
1
y + c
1
)dx + (a
2
x + b
2
y + c
2
)dy = 0 (2.20)
Para resolverla consideremos los siguientes casos:
2.5. SOLUCIONES POR SUSTITUCIONES 65
1. Si a
1
b
2
= a
2
b
1
, la ecuaci on (2.20) se puede escribir de la forma
dy
dx
= g(ax +by +c)
que se resuelve por el metodo Reduccion a Separacion de Variables.
2. Si c
1
= c
2
= 0, la ecuacion (2.20) se convierte en una ecuacion homogenea.
3. Si a
1
b
2
= a
2
b
1
la ecuaci on se hace homogenea si tomamos una translacion de ejes
de la forma x = u + h y y = v + k, donde h y k son constantes, y
dy
dx
=
dv
du
.
Sustituyendo en la ecuacion (2,20), se tiene
dv
du
=
a
1
(u + h) + b
1
(v + k) + c
1
a
2
(u + h) + b
2
(v + k) + c
2
dv
du
=
a
1
u + b
1
v + (a
1
h + b
1
k + c
1
)
a
2
u + b
2
v + (a
2
h + b
2
k + c
2
)
. (2.21)
Como a
1
b
2
= a
2
b
1
, entonces se puede hallar h y k tales que
a
1
h + b
1
k + c
1
= 0 (2.22)
a
2
h + b
2
k + c
2
= 0
para h y k soluciones del sistema (2.22), se tiene que la ecuacion (2.21) es ho-
mogenea.
Ejemplo 2.13. Resolver
(3x + 3y + 4)dx + (2x + 2y + 7)dy = 0. (2.23)
Solucion. Como a
1
b
2
= 3 2 = 2 3 = a
2
b
1
. As,
(3x + 3y + 4)dx + (2x + 2y + 7)dy = 0
[3(x + y) + 4]dx + [2(x + y) + 7]dy = 0
dy
dx
=
3(x + y) + 4
2(x + y) 7
. (2.24)
Sea u = x + y, por lo tanto, u
= 1 + y
y la ecuaci on se convierte en
66 CAP
ITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
du
dx
1 =
3u + 4
2u 7
la cual es una ecuacion de variables separables
_
dx =
_
2u + 7
3 u
du
integrando:
x + c = 2u 9 ln |3 u|
la solucion general de la ecuaci on est a dada por
x + c = 2(x + y) 9 ln |3 (x + y)|
Ejemplo 2.14. Resolver
(3x + y 1)dx + (x + y + 3)dy = 0. (2.25)
Solucion. Como a
1
b
2
= 31 = 11 = a
2
b
1
, usaremos la translaci on x = u+h y y = v+k,
donde h y k satisfacen el sistema
3h + k 1 =0
h + k + 3 =0.
Al resolver el sistema en terminos de h y k tenemos que h = 1, k = 2, es decir
x = u 1 y y = v 2. Como dy = dv y dx = du, sustituyendo en la ecuaci on (2.25) se
tiene
(3u + 3 + v 2 1)du + (u 1 + v 2 + 3)dv = 0
(3u + v)du + (u + v)dv = 0
dv
du
=
3u v
u + v
.
La ecuacion anterior es homogenea, luego tomamos la sustituci on z =
v
u
, donde
dv
du
=
z + u
_
dz
du
_
y al sustituir en la ultima ecuacion obtenemos
2.5. SOLUCIONES POR SUSTITUCIONES 67
z + u
dz
du
=
3u zu
u + zu
z + u
dz
du
=
3 z
1 + z
u
dz
du
=
3 2z z
2
1 + z
separando variables tenemos:
_
z + 1
3 2z z
2
dz =
_
du
u
_
z + 1
z
2
+ 2z 3
dz =
_
du
u
1
2
ln
z
2
+ 2z 3
= ln |u| + c
1
ln
z
2
+ 2z 3
= 2 ln |u| + c
1
ln
z
2
+ 2z 3
= ln |u
2
| + c
1
ahora aplicando exponencial obtenemos:
z
2
+ 2z 3 = u
2
e
c
1
= cu
2
Al sustituir de nuevo z, u y v, vemos que
_
v
u
_
2
+ 2
_
v
u
_
3 = cu
2
v
2
+ 2uv 3u
2
= c
(y + 2)
2
+ 2(y + 2)(x + 1) 3(x + 1)
2
= c.
La ultima ecuaci on es la solucion implcita de (2.25).
68 CAP
ITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
2.5.3. La Ecuaci on de Bernoulli
Una ecuacion diferencial de la forma
dy
dx
+ P(x)y = Q(x)y
n
, n R (2.26)
se denomina ecuaci on diferencial de Bernoulli. N otese en particular, que si n es 0 o 1, la
ecuaci on es lineal o de variables separables y puede resolverse directamente. Si n no es 0
ni 1, la ecuaci on es no lineal, en este caso, hacemos la sustitucion u = y
1n
, que reduce
la ecuacion de Bernoulli a una lineal. En efecto, derivando u con respecto a x
u = y
1n
,
du
dx
= (1 n)y
n
dy
dx
, donde
dy
dx
=
1
1 n
y
n
du
dx
reemplazando en la ecuaci on (2.26) tenemos
1
1 n
y
n
du
dx
+ P(x)y = Q(x)y
n
, n R (2.27)
ahora multiplicamos la ecuacion (2.27) por (1 n)y
n
nos queda:
du
dx
+ (1 n)P(x)y
1n
= (1 n)Q(x) (2.28)
sustituyendo u = y
1n
,
du
dx
+ (1 n)P(x)u = (1 n)Q(x) (2.29)
la cual es una ecuacion lineal.
Ejemplo 2.15. Resolver cada una de las siguientes ecuaciones diferenciales:
a)
dy
dx
y = e
x
y
2
.
b)
dy
dx
y = e
x
y
1
2
.
Solucion. a) En este caso n = 2, tomando la sustitucion obtenemos u = y
1
, derivan-
do con respecto a x se tiene,
du
dx
= y
2 dy
dx
y despejando
dy
dx
tenemos
dy
dx
= y
2 du
dx
reemplazando en la ecuaci on obtenemos:
y
2
du
dx
y = e
x
y
2
(2.30)
2.5. SOLUCIONES POR SUSTITUCIONES 69
multiplicando la ecuacion (2.30) por (y
2
), nos da
du
dx
+ y
1
= e
x
(2.31)
en (2.31) sustituimos u = y
1
:
du
dx
+ u = e
x
, (2.32)
como la ecuaci on diferencial es lineal, el factor integrante para la ecuaci on (2.32) es:
(x) = e
1dx
= e
x
utilizamos la formula (2.15) nos resulta:
u(x) =e
x
__
e
x
(e
x
)dx + c
_
u(x) =e
x
_
e
2x
2
+ c
_
(2.33)
en (2.33) reemplazamos u = y
1
y
1
=
e
x
+ 2ce
x
2
y =
2
e
x
+ 2ce
x
.
b) Para n =
1
2
, entonces u = y
2
, por tanto
dy
dx
= 2u
3 du
dx
Sustituyendo este diferencial
u = y
2
en la ecuaci on original tenemos 2u
3 du
dx
u
2
= e
x
u
1
, multiplicando por
_
1
2
_
u
3
tenemos
du
dx
+
1
2
u =
1
2
e
x
u
2
, una ecuaci on tipo Bernoulli que requiere de una
nueva sustituci on para solucionarla como en el caso a), es decir, en este caso n = 2,
tomando la sustitucion obtenemos s = u
1
, derivando con respecto a x se tiene,
ds
dx
= u
2 du
dx
y despejando
du
dx
tenemos
du
dx
= u
2 ds
dx
reemplazando en la ecuaci on
obtenemos:
u
2
ds
dx
+
1
2
u =
1
2
e
x
u
2
, (2.34)
70 CAP
ITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
multiplicando la ecuacion (2.34) por (u
2
), nos da
ds
dx
1
2
u
1
=
1
2
e
x
, (2.35)
en (2.35) sustituimos s = u
1
:
ds
dx
1
2
s =
1
2
e
x
, (2.36)
como la ecuaci on diferencial es lineal, el factor integrante para la ecuaci on (2.36) es:
(x) = e
1
2
dx
= e
1
2
x
Utilizamos la formula (2.15) nos resulta:
s(x) =e
1
2
x
__
e
1
2
x
_
1
2
e
x
_
dx + c
_
s(x) =e
1
2
x
_
e
1
2
x
+ c
_
(2.37)
en (2.37) reemplazamos s = u
1
u
1
=e
x
+ ce
1
2
x
u =
1
e
x
+ ce
1
2
x
.
Ahora sustituimos u = y
1
2
es decir:
y
1
2
=
1
e
x
+ ce
1
2
x
y =
_
e
x
+ ce
1
2
x
_
2
.
2.5. SOLUCIONES POR SUSTITUCIONES 71
2.5.4. La Ecuaci on de Ricatti
Una ecuacion diferencial de la forma
dy
dx
= P(x) + Q(x)y + R(x)y
2
, (2.38)
se denomina ecuaci on diferencial de Ricatti, tal ecuaci on se puede resolver con dos susti-
tuciones consecutivas, siempre que conozcamos una soluci on particular y
1
de la ecuaci on,
esto es
dy
1
dx
= P(x) + Q(x)y
1
+ R(x)y
2
1
. (2.39)
Para resolverla tomamos la sustituci on y = y
1
+ u, la cual reduce la ecuacion a una de
tipo Bernoulli.
Primero derivamos con respecto a x, es decir:
y = y
1
+ u,
dy
dx
=
dy
1
dx
+
du
dx
.
Reemplazando en la ecuaci on (2.38) tenemos
dy
1
dx
+
du
dx
= P(x) + Q(x)(y
1
+ u) + R(x)(y
1
+ u)
2
. (2.40)
Desarrollando el cuadrado y agrupando (2.40) nos queda:
dy
1
dx
+
du
dx
= P(x) + Q(x)y
1
+ Q(x)u + R(x)y
2
1
+ R(x)2y
1
u + R(x)u
2
sustituyendo (2.39) y simplicando tenemos:
du
dx
=
_
Q(x) + R(x)2y
1
_
u + R(x)u
2
du
dx
_
Q(x) + R(x)2y
1
_
u = R(x)u
2
(2.41)
la cual es una ecuacion de Bernoulli con n = 2.
Ejemplo 2.16. Hallar una familia mono parametrica de soluciones de la ecuacion dife-
rencial
dy
dx
=
4
x
2
1
x
y + y
2
en donde y
1
=
2
x
es una soluci on conocida de la ecuacion.
72 CAP
ITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Solucion. Tomando la sustituci on y = y
1
+ u =
2
x
+ u, derivando con respecto a x se
tiene,
dy
dx
=
2
x
2
+
du
dx
y reemplazando en la ecuaci on obtenemos:
2
x
2
+
du
dx
=
4
x
2
1
x
_
2
x
+ u
_
+
_
2
x
+ u
_
2
.
Desarrollando el cuadrado y simplicando tenemos:
2
x
2
+
du
dx
=
4
x
2
2
x
2
u
x
+
4
x
2
+
4u
x
+ u
2
du
dx
=
3u
x
+ u
2
du
dx
_
3
x
_
u = u
2
. (2.42)
Como la ecuacion (2.42) es de Bernoulli con n = 2, tomando la sustitucion obtenemos
s = u
1
, derivando con respecto a x se tiene,
ds
dx
= u
2 du
dx
y despejando
du
dx
tenemos
du
dx
= u
2 ds
dx
. Reemplazando en la ecuaci on (2.42) obtenemos:
u
2
ds
dx
_
3
x
_
u = u
2
, (2.43)
multiplicando la ecuacion (2.43) por (u
2
), nos da
ds
dx
+
_
3
x
_
u
1
= 1. (2.44)
En (2.44) sustituimos s = u
1
:
ds
dx
+
_
3
x
_
s = 1. (2.45)
Como la ecuacion diferencial es lineal, el factor integrante para la ecuaci on (2.45) es:
(x) = e
3
x
dx
= e
3 ln |x|
= x
3
.
Utilizando la f ormula (2.15) nos resulta:
s =x
3
__
x
3
(1)dx + c
_
s =x
3
_
x
4
4
+ c
_
s =
x
4
+ c
4x
3
(2.46)
2.5. SOLUCIONES POR SUSTITUCIONES 73
en (2.46) reemplazamos s = u
1
u
1
=
x
4
+ c
4x
3
u =
4x
3
x
4
+ c
. (2.47)
Sustituyendo u = y
2
x
en (2.47) y despejando y, tenemos la soluci on:
y = u =
4x
3
x
4
+ c
+
2
x
.
2.5.5. Ecuaci on de Lagrange
Una ecuacion diferencial de la forma
y = g(y
)x + f(y
), (2.48)
se denomina ecuaci on de Lagrange. Para resolverla tomamos la sustituci on y
= p para
obtener la soluci on general de la ecuacion en forma parametrica mediante la cual se
reduce a:
y = g(p)x + f(p). (2.49)
Derivando en (2.48) con respecto a x, obtenemos:
y
= g
(p)p
x + g(p) + f
(p)p
. (2.50)
Reemplazando y
= p en la ecuaci on (2.50) tenemos
p = g
(p)p
x + g(p) + f
(p)p
p g(p) = g
(p)p
x + f
(p)p
p g(p) = p
(g
(p)x + f
(p))
p g(p) =
dp
dx
(g
(p)x + f
(p)),
despejando obtenemos:
dp
dx
=
p g(p)
g
(p)x + f
(p)
. (2.51)
74 CAP
ITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Como y
= p y
dp
dx
son funciones inversas, intercambiando (2.51) nos da
dx
dp
=
g
(p)x + f
(p)
p g(p)
dx
dp
g
(p)
p g(p)
x =
f
(p)
p g(p)
(2.52)
la cual es una ecuacion lineal con solucion
x(p) =
1
(p)
__
(p)Q(p)dp + c
_
= h(p, c) (2.53)
donde (p) es el factor integrante, y p es el par ametro y la expresi on para y es
y = g(p)x(p, c) + f(p). (2.54)
Las ecuaciones parametricas de la soluci on general de la ecuaci on de Lagrange (2.48) son
x(p) = h(p, c) y y = g(p)x(p, c) + f(p) donde c es la constante de la familia de curvas.
Ejemplo 2.17. Hallar las ecuaciones parametricas de la solucion de la ecuacion diferen-
cial
y = x(y
+ 3) 2(y
)
2
.
Solucion. Tomando la sustituci on y
= p y derivando con respecto a x se tiene
y = x(p + 3) 2(p)
2
y
= p + 3 + x
dp
dx
4p
dp
dx
p = p + 3 + x
dp
dx
4p
dp
dx
3 =
dp
dx
(x 4p),
intercambiando y despejando se tiene
dx
dp
=
x
3
+
4
3
p
dx
dp
+
x
3
=
4
3
p. (2.55)
Como la ecuaci on (2.55) es lineal, obtenemos P(p) =
1
3
, Q(p) =
4
3
p, con factor integrante
(p) = e
1
3
dp
= e
1
3
p
tomando la f ormula (2.15) la soluci on es
x(p) = e
1
3
p
__
e
1
3
p
4
3
pdp + c
_
x(p) = 4(p 3) + ce
1
3
p
2.5. SOLUCIONES POR SUSTITUCIONES 75
Las ecuaciones parametricas de la soluci on de la ecuaci on diferencial son
x(p) = 4(p 3) + ce
1
3
p
y =
_
4(p 3) + ce
1
3
p
_
(p + 3) 2p
2
.
2.5.6. Reduccion a Separacion de Variables
Sea la ecuaci on diferencial
dy
dx
= g(ax + by + c).
Aplicando la sustituci on u = ax + by + c esta se reduce a una ecuacion con variables
separables.
Ejemplo 2.18. Resolver
dy
dx
= sin(x + y)
Solucion. Si hacemos u = x +y, entonces
du
dx
= 1 +
dy
dx
, por lo que la ecuacion diferencial
se transforma en
du
dx
1 = sin(u), o sea
du
dx
= 1 + sin(u)
separamos variables, e integrando obtenemos:
_
1
1 + sin(u)
du =
_
dx
tan(u) sec(u) =x + c
ahora como u = x + y sustituimos en la ultima ecuaci on y nos queda como resultado:
tan(x + y) sec(x + y) = x + c.
76 CAP
ITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
2.5.7. Ejercicios
1. En las siguientes funciones, determine si la funci on dada es homogenea. Si lo es,
indique su grado de homogeneidad.
a) f(x, y) = 3x
2
y x
3
+
2y
4
x
.
b) f(x, y) =
2x
2
y+xy
2
y
.
c) f(x, y) =
4xy
3
+2x
2
y
2
xy
.
d) f(x, y) = (x + 3y 2)
2
.
2. Resolver las siguientes ecuaciones diferenciales.
a) y
=
y+x
x
.
b) y
=
2yx
y
.
c) y
=
y
x+y
.
d) y
=
x
2
+y
2
xy
.
e) y
=
x
x+y
.
f ) y
2x
2
+3y
2
+y
x
.
g) (y
2
+ xy + x
2
)dx + (2x
2
+ 3xy + y
2
)dy = 0.
h) (2x + y)dx + (3x + 2y)dy = 0; y(1) = 0.
3. Muestre que si y
= F(x, y) es una ecuacion homogenea, y y = g(x) es una solucion,
entonces y = (1/a)g(ax) es una soluci on para cualquier a. Interprete su resultado
geometricamente.
4. Halle una sustituci on apropiada para resolver la ecuaci on
(x y)
2
y
= 1.
5. Resolver las siguientes ecuaciones.
a) y
=
2x5y+3
2x+4y6
.
b) y
=
x+y+2
2x+y1
.
6. En el problema
y
=
ax + by + c
px + qy + r
se produce un error si aq bp = 0. Demostrar que en este caso ax+by = k(px+qy),
y la sustitucion u = px +qy transforma la ecuacion en una de variables separables.
2.5. SOLUCIONES POR SUSTITUCIONES 77
7. Resolver
y
=
2x + y + 1
4x + 2y + 3
.
8. Encontrar la soluci on general de las siguientes ecuaciones diferenciales:
a)
dy
dx
=
y(ln(y)ln(x) ln +1)
x
.
b) (x + ye
y/x
)dx xe
y/x
dy = 0, y(1) = 0.
c) t
2 dy
dt
+ y
2
= ty.
d)
dy
dx
= 4 +
y 4x + 5.
e) (x + y 1)dx + (y x 5)dy = 0.
f )
dy
dx
=
xy3
x+y1
.
g)
dy
dx
=
xy1
x+y+3
.
h)
dy
dx
= cos(x + y), y(0) =
4
.
9. Resolver las siguientes ecuaciones de Bernoulli:
a) yy
(1/2x)y
2
= 1.
b)
dy
dx
+ 2y = x
2
y
5
.
c) y
+ y = 3e
x
y
3
.
d)
dy
dx
3y = xy
5
.
e)
dy
dx
+
y
3x
=
y ln(x).
f )
dy
dx
= y(x
2
y
3
4).
g)
xdy
dx
(1 + x)y = x
3
y
2
.
h) x
3 dy
dx
2x
2
y = 3y
4
, y(1) =
1
2
.
i ) y
1/2 dy
dx
+ y
3/2
= 2, y(0) = 4.
10. Encontrar La solucion general de las siguientes ecuaciones diferenciales homogeneas.
a)
dy
dx
=
x+y
xy
.
b)
dy
dx
=
y
y2x
.
c)
dy
dx
=
x+2y
y+2x
.
78 CAP
ITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
11. Demuestre que las curvas soluci on de la ecuacion homogenea
dy
dx
=
y(2x
3
y
3
)
x(y
3
x
3
)
son de la forma x
3
+ y
3
= Cxy.
12. Demuestre que la sustitucion v = ln(y) transforma la ecuaci on diferencial
dy
dx
+
P(x)y = Q(x)(y ln(y)) en la ecuaci on diferencial
dy
dx
+ P(x)y = Q(x)v(x).
13. Utilice la idea del problema 12 para resolver la ecuaci on
x
dy
dx
2x
2
y + 3y ln y = 0.
14. Resuelva las siguiente ecuaciones
a) Halle una familia mono parametrica de soluciones de la ecuacion diferencial
dy
dx
+ y
2
= x
2
+ 2x,
en donde y
1
= x 1 es una soluci on conocida de la ecuaci on.
b) Halle una familia mono parametrica de soluciones de la ecuacion diferencial
dy
dx
+ 2xy = 1 + y
2
+ x
2
,
en donde y
1
= x es una soluci on conocida de la ecuacion.
15. Ecuaciones acopladas. Al analizar ecuaciones acopladas de la forma
dy
dt
= ax + by,
dx
dt
= x + y,
donde a, b, , y son constantes, quisieramos determinar la relacion entre x y
y en vez de las soluciones individuales x(t), y(t). Para esto, dividamos la primera
ecuaci on entre la segunda para obtener
dy
dx
=
ax + by
x + y
. (2.56)
2.5. SOLUCIONES POR SUSTITUCIONES 79
Esta nueva ecuaci on es homogenea, de modo que podemos resolverla mediante la
sustituci on v = y/x. Nos referimos a las soluciones de (2.32) como curvas integrales.
Determine las curvas integrales del sistema
dy
dt
= 4x y,
dx
dt
= 2x y.
2.5.8. Soluci on
1. a) Homogenea de grado 3.
b) Homogenea de grado 1/2.
c) Homogenea de grado 2.
d) No homogenea.
2. a) y = x(ln |x| + c).
b) x = (y x)[ln |y x| + c].
c) x = y(ln |y| + c).
d) y
2
= 2x
2
(ln |x| + c).
e) ln
1
y
x
_
y
x
_
2
5
ln
51(2y/x)
5+1+(2y/x)
= 2 ln |x| + c.
f )
y
3+
2x
2
+3y
2
x
3
x
c = 0.
g) 4xy + y
2
+ x
2
= c.
h)
x
2(y+x)
ln |y + x| =
1
2
.
4. y =
1
2
ln
xy1
xy+1
+ c.
5. a) (x 1)
3
_
4
_
y1
x1
_
1
_
y1
x1
+ 2
2
= c.
b) ln
1
y+5
x3
_
y+5
x3
_
2
+
3
5
ln
y+5
x3
+
1
2
5
2
y+5
x3
+
1
2
+
5
2
= 2 ln |x 3| + c.
7. 10(2x + y) + ln |5(2x + y) + 7| = 25x + c
8. a) y(x) =
x
e
cx
.
80 CAP
ITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
b) y(x) = ln(ln(x) + c)x.
c) y(t) =
t
ln(t)+c
.
d) x 2
y 4x + 5 = c.
e)
1
2
ln
(x + 2)
2
+ (y 3)
2
+arctan
_
y3
x+2
_
= c.
f ) (y + 1)
2
+ 2(x 2)(y + 1) (x 2)
2
= c.
g) (y + 2)
2
+ 2(x + 1)(y + 2) (x + 1)
2
= c.
h) y(x) = x + 2 arctan
_
x + tan
_
8
_
_
.
9. a) y
2
= 2x ln |x| + cx.
b) y
4
=
64
64ce
8x
+32x
2
+8x+1
.
c) y
2
=
e
x
ce
x
+c
.
d) y
4
=
36e
12x
36c(12x1)e
12x
.
e) y =
_
3x(7 ln(x)6)|x|
1/6
+49c
_
2
2401|x|
1/6
.
f ) y =
3
2/3
2
5/3
_
288ce
12x
+72x
2
+12x+1
_
1/3
.
g) y =
x
66x+3x
2
x
3
+e
x
C
.
h) y =
2
2/3
x
2
_
9x
4
4c
_
1/3
.
i ) y = e
x
_
2e
3x/2
+ c
_
2/3
.
10. a)
1
2
ln(x
2
+ y
2
) + arctan
_
y/x
_
= c.
b)
2
3
ln |y|
1
3
ln | 3x + y| = c.
c)
ln |x+y|3 ln |xy|
2
= c.
13. y = e
2
5
x
2
+cx
3
.
14. a) y =
e
x
2
+2x
_
e
x
2
+2x
_
dx+c
x 1.
b) y = x
1
xc
.
2.6. Soluci on de Ecuaciones Diferenciales Con Maple
y Calculadora
Captulo 3
Aplicaciones de las Ecuaciones
Diferenciales de Primer Orden
3.1. Ley de enfriamiento de Newton
La ley del enfriamiento de Newton dice que en un cuerpo que se enfra, la rapidez con
que la temperatura T(t) cambia es proporcional a la diferencia entre la temperatura del
cuerpo y la temperatura constante T
m
del medio que lo rodea. Esto es,
dT
dt
= k(T T
m
) (3.1)
en donde k es una constante de proporcionalidad.
Ejemplo 3.1. Un termometro se saca de una habitaci on, en donde la temperatura del
aire es de 70
0
F, al exterior, en donde la temperatura es de 10
0
F. Despues de 1/2 minuto
el term ometro marca 50
0
F. Cuanto marca el termometro cuando t = 1 minuto? cu anto
demorar a el term ometro en alcanzar los 15
0
F?
Solucion. Es claro que T
m
= 10
0
F, reemplazando en la ecuaci on (3.1) se tiene:
dT
dt
= k(T 10) (3.2)
T(0) = 70
0
F
T
_
1
2
_
= 50
0
F.
Se debe resolver la ecuaci on (3.2) con condiciones iniciales, la cual es lineal y tambien de
variables separables. Empleando la tecnica de variables separables obtenemos:
81
82CAP
ITULO3. APLICACIONES DE LAS ECUACIONES DIFERENCIALES DE PRIMER ORDEN
dT
T 10
=kdt
_
dT
T 10
=
_
kdt
ln | T 10 |=kt + c
1
T 10 =c
2
e
kt
.
Entonces T = 10+c
2
e
kt
. Cuando t = 0, se tiene que T = 70
0
F, de modo que 70 = 10+c
2
es
decir c
2
= 60 y, por lo tanto T = 10+60e
kt
, ahora podemos hallar k, ya que T(1/2) = 50
0
F
50 =10 + 60e
k
1
2
e
1
2
k
=
40
60
k =2 ln
_
2
3
_
0,81093.
En consecuencia,
T(t) = 10 + 60e
0,81093t
.
Para t = 1 tenemos T(1) = 10+60e
0,810931
= 36,66 37
0
F, el termometro marca 37
0
F
cuando t = 1 minuto. Ahora debemos hallar cuanto se demora para alcanzar 15
0
F,
15 =10 + 60e
0,81093t
5
60
=e
0,81093t
t =
ln
_
1/12
_
0,81093
= 3,06427 3,1minutos.
As, para alcanzar 15
0
F se demora 3,1 minutos.
3.1.0.1. Ejercicios
1. Un termometro se lleva del interior de una habitaci on al exterior, donde la tem-
peratura del aire es 6
0
F. Despues de un minuto, el termometro indica 58
0
F; cinco
minutos despues marca 32
0
F. Cual era la temperatura interior?
3.1. LEY DE ENFRIAMIENTO DE NEWTON 83
2. Si una barra metalica peque na, cuya temperatura inicial es de 25
0
F, se deja caer
en un recipiente con agua hirviente, cuya temperatura es de 212
0
F. cu anto tiem-
po tardar a en alcanzar 100
0
F si se sabe que la temperatura aumento 3
0
F en un
segundo? Cuanto tiempo tardar a en llegar a 105
0
F?.
3. Una taza de cafe caliente, inicialmente a 100
0
C, se enfra hasta 85
0
C en 5 minutos
al estar en un cuarto con temperatura de 21
0
C. Use solo la ley de enfriamiento
de Newton y determine el momento en que la temperatura del cafe estara a unos
55
0
C.
4. Una cerveza fra, inicialmente a 33
0
F, se calienta hasta 45
0
F en 3 minutos, estando
en un cuarto con temperatura 65
0
F. Que tan caliente estar a la cerveza si se deja
ah durante 10 minutos?
5. Una taza de te caliente est a inicialmente a 190
0
F y se deja en un cuarto que tiene
una temperatura ambiente de 75
0
F. Suponga que a partir del tiempo t = 0 se enfra
a razon de 25
0
F por minuto.
a. Suponga que se aplica la ley de Newton sobre el enfriamiento. Escriba un
problema de valor inicial que modele la temperatura del te caliente.
b. Cuanto tiempo le toma al te caliente enfriarse a una temperatura de 120
0
F?
6. En una fra ma nana de Bogota con una temperatura ambiente de 10
0
C, se encontro
un cadaver a las 10 : 00 a.m. El detective saco un termometro y midio la tempe-
ratura del cuerpo: 33
0
C. Luego salio a revisar la escena del crimen. Al regresar, a
las 11 : 00 a.m, hall o que la temperatura del cuerpo era de 32
0
. En que momento
ocurri o el asesinato? (Sugerencia: la temperatura normal del cuerpo es de 37
0
C.)
3.1.0.2. Soluci on
1. 71, 516
0
F.
2. a) Para llegar a 100
0
F tarda 31,7 seg.
b) Para llegar a 105
0
F tarda 34,526 seg.
3. 20,02 min.
4. 58,3
0
F.
5. a) T = 75 + 115e
0,24512t
.
b) 3, 82 min.
84CAP
ITULO3. APLICACIONES DE LAS ECUACIONES DIFERENCIALES DE PRIMER ORDEN
6. a) T = 72 + 108e
0,26329t
.
b) 5, 13 min.
c) Murio a las 4 a.m con 21 minutos.
3.2. Crecimiento y Decrecimiento
Como habamos expresado en el captulo 1, la ley de Malthus, expresada en smbolos
matem aticos, est a dada por
dx
dt
= kx x(t
0
) = x
0
(3.3)
en donde k es una constante. Esta aparece en muchas aplicaciones de distintas areas
del conocimiento, que involucran crecimiento o decrecimiento de una cantidad modelada
en el tiempo. Por ejemplo, en biologa a menudo se observa que la rapidez con que
ciertas bacterias se multiplican es proporcional al n umero de bacterias presentes en cierto
instante. Para cortos intervalos de tiempo, la magnitud de una poblaci on de animales
peque nos, como roedores, puede predecirse con bastante exactitud mediante la soluci on
de (3.3). En fsica, un problema de valor inicial como (3.3) proporciona un modelo para
aproximar la cantidad que queda de una sustancia radioactiva que se desintegra, esta
ecuaci on en forma simplicada sirve como modelo para determinar la temperatura de un
cuerpo que se enfra. En qumica, el mismo modelo diferencial sirve para determinar la
cantidad de sustancia que queda durante una reaccion.
La constante de proporcionalidad k puede ser negativa o positiva y se puede determinar
si se establece otro valor de la variable x en un tiempo t
1
> t
0
.
Ejemplo 3.2. Se sabe que la poblaci on de cierta comunidad aumenta, en un instante
cualquiera, con una rapidez proporcional al n umero de personas presentes en dicho ins-
tante. Si la poblaci on se duplica en 5 a nos cu anto demorar a en triplicarse?.
Solucion. De acuerdo con el enunciado del problema, un modelo para estudiar este
fen omeno es el siguiente:
dP
dt
= kP, (3.4)
sujeta a P(0) = P
0
, esto produce el modelo matem atico llamado ley exponencial o de
Malthus para el crecimiento de poblaciones.
3.2. CRECIMIENTO Y DECRECIMIENTO 85
Se pretende hallar el valor de t para el cual P(t) = 3P
0
.
La ecuacion diferencial en (3.4) es de variables separables, por tanto:
dP
P
= kdt
integrando tenemos, ln |P| = kt + c de donde despejando P obtenemos P(t) = Ce
kt
.
Reemplazando la condicion inicial P(0) = P
0
se tiene C = P
0
por tanto:
P(t) = P
0
e
kt
. (3.5)
Ahora como P(5) = 2P
0
remplazando en (3,5) se tiene:
2P
0
=P
0
e
5k
2 =e
5k
ln(2) =k5
k =
ln(2)
5
P(t) =P
0
e
ln(2)
5
t
,
Para determinar el valor de t para el cual la poblacion se ha triplicado, despejamos t de
3P
0
= P
0
e
ln(2)
5
t
luego cancelando y tomando la funci on logaritmo en ambos miembros de la ecuacion
tenemos:
ln(3) =
ln(2)
5
t
t = 5
ln(3)
ln(2)
7,9
as se demora en triplicarse t 7,9 a nos.
3.2.1. Determinaci on de edades por el metodo del Carbono 14
La teora de la dataci on por carbono se basa en que el is otopo Carbono 14 se produce
en la atm osfera por la acci on de la radiacion c osmica sobre el nitrogeno. El cociente
86CAP
ITULO3. APLICACIONES DE LAS ECUACIONES DIFERENCIALES DE PRIMER ORDEN
de la cantidad de C
14
y la cantidad de carbono ordinario presentes en la atmosfera es
constante y, en consecuencia, la proporci on de is otopo presente en todos los organismos
vivos es la misma que en la atm osfera. Cuando un organismo muere, la absorci on de
C
14
cesa. As, comparando la proporci on de C
14
que hay en un f osil con la proporci on
constante encontrada en la atm osfera, es posible obtener una estimacion razonable de
su edad. El metodo usa ademas el hecho que la vida media del C
14
radioactivo es de
aproximadamente 5600 a nos.
Ejemplo 3.3. El is otopo radioactivo de plomo, Pb 209, se desintegra, en un instante
cualquiera, con una rapidez proporcional a la cantidad presente en dicho instante, y
tiene una vida media de 3.3 horas. Si inicialmente hay 1 gramo de plomo, cu anto tiempo
transcurrir a para que se desintegre el 90 % de dicho elemento.
Solucion. Sea A(t) la cantidad de plomo que queda en un instante cualquiera. La ecuacion
diferencial con condicion inicial es:
dA
dt
= kA, A(0) = 1 gramo.
Como se tiene en el Ejemplo 3.2, se tiene que A(t) = Ce
kt
donde notamos por la condici on
inicial que C = 1 y A(t) = e
kt
. Como tiene una vida media de 3,3 horas, tenemos que
A(3,3h) =
1
2
gramos, entonces para evaluar k se debe resolver
1
2
= e
3,3k
. Despejando k
resulta
k =
ln
_
1/2
_
3,3
0,210045.
De esta forma, A(t) = e
0,210045t
.
Como se desintegra el 90 % del inicial, entonces queda 10 % de la sustancia. Para hallar t se
debe resolver 0,1 1gramos = e
0,210045t
. Despejando t resulta t =
ln(0,1)
0,210045
10,96 11
horas, para que se desintegre pasan 11 horas.
Ejemplo 3.4. En una cueva de Sud africa se hallo un cr aneo humano junto con los restos
de una hoguera. Los arque ologos creen que la edad del craneo sea igual a la edad de la
hoguera. Se ha determinado que s olo queda 2 % de la cantidad original de carbono 14 en
los restos de madera en la hoguera. Estime la edad del craneo.
Solucion. Nuevamente, se tiene que A(t) = A
0
e
kt
donde A(0) = A
0
cantidad inicial.
Cuando t = 5600 a nos, A(5600) = A
0
/2, de los cual es posible determinar el valor de k,
como sigue:
3.2. CRECIMIENTO Y DECRECIMIENTO 87
A
0
2
=A
0
e
5600k
5600k =ln
_
1
2
_
= ln(2)
k =
ln(2)
5600
= 0,00012378.
Por lo tanto, A(t) = A
0
e
0,00012378t
. Si queda el 2 % de la cantidad inicial entonces
2
100
A
0
= A
0
e
0,00012378t
despejando t resulta
ln
_
2
100
_
=0,00012378t
t =
ln
_
2/100
_
0,00012378
31604, 6 31605 a nos.
De esta forma determinamos que la edad del craneo es de aproximadamente 31605 a nos.
3.2.2. Modelo logstico de crecimiento poblacional
El modelo anterior (ley de Malthus) debido a su simplicidad, es solo aplicable a peque nas
poblaciones. En aquellas que son grandes, se tendran algunas restricciones: recursos,
espacio, alimento, etc., luego esto debera ser modelado. El modelo logstico tiene en
cuenta esta situaci on: Supongamos que se ha estimado que cierto espacio puede tolerar
m aximo una poblaci on de tama no N
1
(este se puede encontrar por experimentaci on, simu-
laci on, etc.) y que si la poblacion es peque na (con respecto a N), la tasa de crecimiento
de esta crecer a proporcionalmente a su tama no. Si la poblacion es demasiado grande
(respecto a N), la tasa de crecimiento es negativa. El modelo viene dado en la siguiente
forma
dP
dt
= kP
_
1
P
N
_
.
1
Usualmente recibe el nombre de soporte.
88CAP
ITULO3. APLICACIONES DE LAS ECUACIONES DIFERENCIALES DE PRIMER ORDEN
N otese que el factor 1
P
N
es positivo cuando P < N y negativo cuando P > N. La
ecuaci on dada es de variables separables. Veamos como se resuelve
dP
dt
= kP
_
1
P
N
_
dP
P
_
1
P
N
_ = kdt
_
dP
P
_
1
P
N
_ =
_
kdt = kt + C
1
.
La integral del lado izquierdo se hace por fracciones parciales
_
dP
P
_
1
P
N
_ =
_ _
1
P
+
1/N
1 P/N
_
dP
=ln P ln
1
P
N
= ln
P
1
P
N
=ln
NP
N P
de donde
ln
NP
N P
= kt + C
1
o equivalentemente,
NP
N P
= e
kt+C
1
= e
kt
e
C
1
= C
2
e
kt
.
Debemos considerar dos situaciones
1. Si N P > 0, entonces
NP
N P
= C
2
e
kt
NP = NC
2
e
kt
PC
2
e
kt
P
_
N + C
2
e
kt
_
= NC
2
e
kt
P =
NC
2
e
kt
N + C
2
e
kt
=
N
N
C
2
e
kt
+ 1
P =
N
NC
3
e
kt
+ 1
3.2. CRECIMIENTO Y DECRECIMIENTO 89
donde C
3
=
1
C
2
.
2. Si N P < 0, entonces
NP
N P
= C
2
e
kt
NP = NC
2
e
kt
+ PC
2
e
kt
P
_
N C
2
e
kt
_
= NC
2
e
kt
P =
NC
2
e
kt
N C
2
e
kt
=
N
N
C
2
e
kt
1
P =
N
1 NC
3
e
kt
donde, otra vez, hemos hecho C
3
=
1
C
2
.
Si la poblaci on inicial es P(0) = P
0
< N entonces la poblacion crecera (pues
dp
dt
es positivo
suponiendo k > 0) hasta el soporte:
lm
t
P = lm
t
N
1 NC
3
e
kt
= N.
En cualquiera de las dos situaciones la poblacion tiende a estar en equilibrio . Si P(0) =
P
0
= 0, la poblaci on se mantendra en cero, naturalmente. Finalmente, si P(0) = P
0
= N
entonces la poblaci on se mantendra constante en P(t) = N. En resumidas cuentas la
poblaci on viene dada mediante la f ormula
P(t) =
_
_
N
NC
3
e
kt
+1
si 0 < P
0
< N
N
1NC
3
e
kt
si P
0
> N
0 si P
0
= 0
N si P
0
= N.
En la gura (3.1) se presentan dos situaciones hipoteticas en que el soporte es 1 (asntota
horizontal). La primera, la poblaci on inicial es mayor que el soporte y a lo largo del
tiempo decrecera. Y en la segunda ecuaci on, la poblaci on inicial es menor que el soporte
(pero positiva) y la poblacion crecer a hasta el soporte.
Ejemplo 3.5. En cierta ciudad hay 4800 personas susceptibles de contraer una cierta
enfermedad contagiosa. La tasa de crecimiento de una epidemia es conjuntamente pro-
porcional al n umero de personas infectadas y al n umero de personas que todava no se
han infectado. Inicialmente contraen la enfermedad 300 personas, y 10 das despues se
han infectado 1200.
90CAP
ITULO3. APLICACIONES DE LAS ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Figura 3.1:
1. Cuantas personas se habr an infectado al cabo de 20 das?
2. Cuando se propagar a con mayor rapidez la enfermedad? (es decir, al cabo de
cu antos das se habr a infectado la mitad de las personas susceptibles de contraer
la enfermedad).
Solucion. En este caso, N = 4800 y la ecuaci on esta dada por
dP
dt
=k
1
P(4800 P)
=4800k
1
P
_
1
P
4800
_
.
N otese que se trata de una ecuacion logstica con k = 4800k
1
y soporte N = 4800, adem as
P(0) = 300 < 4800 = N de tal forma que la soluci on esta dada por
P(t) =
N
NC
3
e
kt
+ 1
=
4800
4800C
3
e
kt
+ 1
P(0) = 300,
P(0) =
4800
4800C
3
+ 1
= 300
4800 =1440000C
3
+ 300.
3.2. CRECIMIENTO Y DECRECIMIENTO 91
De donde C
3
= 0,003125 y actualizando la ecuaci on tenemos
P(t) =
4800
15e
kt
+ 1
.
Se sabe tambien que P(10) = 1200, lo que permite encontrar el parametro k.
P(10) =
4800
15e
k10
+ 1
= 1200
4
15e
k10
+ 1
= 1
e
k10
=
1
5
k =
1
10
ln
_
1
5
_
0,16094.
Por tanto la expresion para la poblaci on de enfermos esta dada por
P(t) =
4800
15e
0,16094t
+ 1
.
a) Para calcular el n umero aproximado de enfermos al cabo de 20 das, hacemos
P(20) =
4800
15e
0,16094(20)
+ 1
3000
b) Para encontrar el tiempo (en das) en que la mitad de la poblaci on se ha infectado
resolvemos
P(t) = 2400
4800
15e
0,16094t
+ 1
=
4800
2
= 2400
2
15e
0,16094t
+ 1
= 1
15e
0,16094t
+ 1 = 2
e
0,16094t
=
1
15
t = 0,16094 ln
_
1
15
_
18,8 das.
92CAP
ITULO3. APLICACIONES DE LAS ECUACIONES DIFERENCIALES DE PRIMER ORDEN
3.2.2.1. Ejercicios
1. Se sabe que un material radioactivo se desintegra con una rapidez proporcional a
la cantidad presente en cualquier instante. Si inicialmente hay 150 mg de material
y, despues de tres a nos, se observa que el 10 % de la masa original se desintegr o,
determinar:
a) Una expresi on para la masa al momento t.
b) El tiempo necesario para que se desintegre el 20 % de la masa original.
2. Un material radioactivo se desintegra tres quintos en 2 000 a nos. Determinar su
vida media.
3. En 1990, el departamento de recursos naturales libero 2000 ejemplares de una
especie de pez en un lago. En 1997, la poblaci on de estos peces en el lago se estim o en
5000. Use la ley de Malthus para el crecimiento de poblaciones y estime la poblaci on
de estos peces en el lago en el a no 2010.
4. En 1990, la poblacion de lagartos en los terrenos del Centro Espacial Kennedy se
estim o en 350. En 2000, la poblaci on haba aumentado hasta un estimado de 1300.
Use la ley de Malthus para el crecimeinto de poblaciones y estime la poblaci on de
lagartos en dichos terrenos, en el a no 2010.
5. La poblacion de una comunidad crece a razon proporcional a la poblacion en cual-
quier momento t. Su poblaci on inicial es de 6500 y aumenta 15 % en 10 a nos. Cu al
ser a la poblacion en 30 a nos?.
6. Las observaciones sobre el crecimiento de tumores animales indican que el tama no
y(t) del tumor al tiempo t puede describirse mediante la ecuaci on diferencial
dy
dt
= ky ln
_
y
a
_
,
donde k y a son constantes positivas. Esta ecuaci on diferencial en ocasiones se
conoce como ley de crecimiento de Gompertz.
a) Con ayuda de un software, o calculadora gracadora, construya campos de
pendientes de la ecuaci on para diversos valores de a y k.
b) Tiene esta ecuacion diferencial soluciones de equilibrio? Si es as, Cuales
son? Si no, explique la razon.
c) Resuelva esta ecuaci on diferencial.
3.2. CRECIMIENTO Y DECRECIMIENTO 93
7. Un modelo de poblaciones utilizado en las predicciones actuariales se basa en la
ecuaci on de Gompertz
dP
dt
= P(a b ln(P)),
donde a y b son constantes
a) Halle P(t) en la ecuaci on de Gompertz.
b) Si P(0) = P
0
> 0, de una formula para P(t) en terminos de a, b, P
0
y t.
c) Describa el comportamiento de P(t) cuando t +(Sugerencia: Considere
los casos para b > 0 y b < 0).
8. En los problemas a), b), suponga que la razon de decaimiento de una sustancia
radiactiva es proporcional a la cantidad de sustancia presente. La vida media de
una sustancia radiactiva es el tiempo que tarda en desintegrarse la midad de la
sustancia.
a) Si en un principio se tiene 80 g de una sustancia radiactiva y despues de 2 das
s olo restan 20 g, que porcentaje de la cantidad original quedar a despues de
5 das?
b) Si en un principio se tienen 400 g de una sustancia radiactiva y despues de 10
a nos restan 100 g, Cuanto tiempo deber a transcurrir para que solo queden 5
g?
9. En cualquier tiempo t la cantidad de bacterias en un cultivo crece a raz on propor-
cional al n umero de bacterias presentes. Al cabo de dos horas se observa que hay
600 individuos. Despues de 15 horas hay 3000 especmenes. Cual era la cantidad
inicial de bacterias?
10. El Pb-209, is otopo radioactivo del plomo, se desintegra con una rapidez propor-
cional a la cantidad presente en cualquier tiempo t y tiene una vida media de 3.3
horas. Si al principio haba 0.5 gramo de plomo, cuanto tiempo debe transcurrir
para que se desintegre 95 %?
11. Muchos creen que el sudario de Turn, que muestra un negativo de la imagen de un
cuerpo de un hombre crucicado, es la mortaja de Jes us de Nazareth. En 1988, el
Vaticano otorg o autorizacion para que se fechara el carbono del manto. Tres labo-
ratorios cientcos independientes, que analizaron la tela, llegaron a la conclusion
que tiene unos 600 a nos, edad que coincide con su aparici on hist orica. Con esta
edad determine que porcentaje de la cantidad original de C
14
queda en la tela en
1988.
94CAP
ITULO3. APLICACIONES DE LAS ECUACIONES DIFERENCIALES DE PRIMER ORDEN
3.2.2.2. Soluci on
1. a) M(t) = 150e
0,18932t
.
b) 1,17 a nos.
2. 1512,9 a nos.
3. Aproximadamente 27416 peces.
4. 4828.7.
5. 9885.6.
6. a) Figura 3.2 para a = 1 y k = 1.
Figura 3.2:
b) 0 y a.
c) y(t) = ae
e
kt
c
.
7. a) p(t) = e
ae
btbc
b
.
b) p(t) = e
aae
bt
b
p
0
e
bt
.
8. a) 3,12 %
3.3. MEZCLAS 95
b) 31 a nos 219 das.
9. 468.4.
10. 14,3 horas.
11. Queda el 92,8 % de C
14
.
3.3. Mezclas
Algunos problemas que involucran mezclas de uidos dan lugar a plantear una ecuaci on
diferencial lineal de primer orden que modele la cantidad de mezcla o la concentracion
de una sustancia en un uido.
En los problemas se requiere determinar la cantidad A(t), de una sustancia que hay en
un tanque en cada instante t. La razon de cambio de la cantidad de la sustancia presente
en el tanque es igual a la velocidad de entrada menos la velocidad de salida
dA
dt
= (Rapidez de entrada) (Rapidez de salida)
dV
dt
= R
1
R
2
(3.6)
donde
Rapidez de entrada = (flujo de entrada) (concentracion )
suponiendo que el ujo de entrada es igual al de salida, la concentracion se halla divi-
diendo la cantidad A(t) por el volumen de la mezcla que hay en el instante t. As
Rapidez de salida = (flujo de salida) (concentracion )
Ejemplo 3.6. La corriente sangunea lleva un medicamento hacia el interior de un organo
a raz on de 3 cm
3
/seg y sale de el a la misma velocidad. Se sabe que el volumen del organo
es de 125 cm
3
y la concentraci on del medicamento que entra es de 0, 2 g/cm
3
. Cual es
la concentraci on del medicamento en el organo en el instante t si inicialmente no haba
vestigios alguno del medicamento? Cuando la concentraci on ser a de 0, 1 g/cm
3
?
Solucion. Primero debemos determinar la rapidez con que un medicamento entra al
interior de un organo, sabemos que el medicamento entra a una razon constante de
3 cm
3
/seg. La concentraci on del medicamento que entra es de 0, 2 g/cm
3
, concluimos
que la rapidez de entrada en el organo es:
96CAP
ITULO3. APLICACIONES DE LAS ECUACIONES DIFERENCIALES DE PRIMER ORDEN
R
1
= 3
cm
3
seg
0, 2
g
cm
3
= 0, 6
g
seg
.
Ahora debemos determinar la rapidez de salida. Como el ujo de entrada es igual al de
salida, la concentraci on es A(t)/ (el volumen del organo). Por lo tanto la rapidez con que
el medicamento sale del organo es:
R
2
=
A(t)
125
g
cm
3
3
cm
3
seg
=
3A(t)
125
g
seg
.
En un principio no hay medicamento en el organo, de modo que A(0) = 0 g, al sustituir
R
1
y R
2
en (2.21) tenemos:
dA
dt
= 0, 6
3A(t)
125
A(0) = 0
dA
dt
+
3A
125
= 0, 6. (3.7)
La ecuaci on (2.22) es lineal, donde P(t) =
3
125
y Q(t) = 0,6, entonces podemos hallar el
factor integrante sustituyendo en la formula (2,14)
(t) = e
3
125
dt
= e
3
125
t
y reemplazando en la formula (2.15), as tenemos
A(t) = e
3
125
t
_
_
0,6e
3
125
t
dt + c
_
= e
3
125
t
_
25e
3
125
t
+ c
_
= 25 + ce
3
125
t
.
Al usar la condici on inicial A(0) = 0 para evaluar la constante, obtenemos
A(0) = 25 + c = 0
c = 25.
3.3. MEZCLAS 97
Luego,
A(t) = 25 25e
3
125
t
.
La cual es la cantidad de medicamento en el organo despues de t minutos. Para determinar
la concentraci on, se divide la cantidad entre el volumen es decir:
C(t) =
A(t)
125
=
25 25e
3
125
t
125
C(t) =
1 1e
3
125
t
5
. (3.8)
La ecuaci on (2.23) es la concentraci on de medicamento en el organo despues de t minutos.
para determinar en que momento la concentraci on es 0, 1 g/cm
3
reemplazamos en (2.23)
0,1 =
1 e
3
125
t
5
t =
125 ln |0,5|
3
28,88 29.
En t 29seg la concentraci on ser a de 0, 1 g/cm
3
.
Ejemplo 3.7. Una solucion de acido ntrico entra a una raz on constante de 6 litros/minutos
en un tanque de gran tama no que en un principio contena 200 litros de una solucion
de acido ntrico al 0,5 %. La solucion dentro del tanque se mantiene bien revuelta y sale
del tanque a razon de 8 litros/minutos. Si la soluci on que entra en el tanque tiene acido
ntrico al 20 %, determine el volumen de acido ntrico en el tanque despues de t minutos.
Solucion. Sea V (t) el volumen de acido ntrico en el tanque despues de t minutos. En
problemas de esta clase la rapidez neta con que V (t) cambia esta dada por
dV
dt
= R
1
R
2
(3.9)
donde R
1
es la rapidez de entrada y R
2
la rapidez de salida.
Primero debemos determinar la rapidez con que el acido ntrico entra al tanque, sabemos
que la soluci on entra a una raz on constante de 6 litros/minuto. La solucion que entra en
el tanque tiene acido ntrico al 20 %, la concentracion es
20
100
, concluimos que la rapidez
de entrada en el tanque es:
R
1
= 6
litros
minutos
20
100
=
6
5
litros
minutos
.
98CAP
ITULO3. APLICACIONES DE LAS ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Ahora debemos determinar la rapidez de salida. La diferencia entre la raz on de ujo de
entrada y la raz on de ujo de salida es 68 = 2 litros/minuto, de modo que el volumen
de uido en el tanque despues de t minutos es (200 2t) litros. Por lo tanto la rapidez
con que el acido ntrico sale del tanque es
R
2
= 8
litros
minutos
_
V (t)
200 2t
_
=
4V (t)
100 t
litros
minutos
.
En un principio el tanque contena 200litros de una soluci on de acido ntrico al 0,5 %, de
modo que V (0) = 200 litros
0,5
100
= 1 litros, al sustituir R
1
y R
2
en (2.21) tenemos:
dV
dt
=
6
5
4V
100 t
, V (0) = 1litro
dV
dt
+
4V
100 t
=
6
5
. (3.10)
La ecuacion (2.25) es lineal donde P(t) =
4v
100t
y Q(t) =
6
5
, entonces podemos hallar el
factor integrante sustituyendo en la formula (2,14),
(t) = e
4
100t
dt
= e
4ln(100t)
= (100 t)
4
y reemplazando en la formula (2.15) tenemos
V (t) =
1
(100 t)
4
_
_
(100 t)
4
6
5
dt + c
_
=
1
(100 t)
4
_
2(100 t)
3
5
+ c
_
= 0,4(100 t) + c(100 t)
4
.
Al usar la condici on inicial V (0) = 1 para evaluar la constante, obtenemos
V (0) = 0,4(100 0) + c(100 0)
4
= 1
40 + 10
5
c = 1
c = 3,9 10
4
.
Luego
V (t) = 0,4(100 t) (3,9 10
4
)(100 t)
4
.
El cual es el volumen de acido ntrico en el tanque despues de t minutos.
3.3. MEZCLAS 99
3.3.0.3. Ejercicios
1. Un tanque de 400 galones contiene inicialmente 200 galones de agua que contiene 2
partes por 1000 millones en peso de dioxina que es una carcin ogena extremadamente
potente. Suponga que el agua que contiene 5 partes por 1000 millones de dioxina
uye hacia arriba del tanque a raz on de 4 galones por minuto. El agua en el tanque
se mantiene bien mezclada y se retiran dos galones por minuto por el fondo del
tanque. Cuanta dioxina se encuentra en el tanque cuando esta lleno?
2. Una cubeta de 5 galones esta llena de agua pura. Suponga que empezamos a a nadir
sal a la cubeta a raz on de
1
4
de libra por minuto. Ademas, abrimos el grifo de
manera que salga
1
2
gal on por minuto de la cubeta y agregamos agua pura para
mantener llena la cubeta. Si la soluci on de agua salada esta siempre bien mezclada.
Cul es la cantidad de sal en la cubeta despues de.
a. 1 minutos.
b. 10 minutos.
c. 60 minutos.
3. Un tanque parcialmente lleno con 100 galones de salmuera, con 10lb de sal disuelta,
le entra salmuera con 1/2lb de sal por gal on a razon de 6 gal/min. El contenido del
tanque esta bien mezclado y de el sale a raz on de 4 gal/min de soluci on. Calcule la
cantidad de libras de sal que hay en el tanque a los 30 minutos.
4. Un deposito contiene 50 litros de una soluci on compuesta por 90 % de agua y 10 %
de alcohol. Se vierte el deposito a raz on de 4 litros/minuto una segunda soluci on
que contiene 50 % de agua y 50 % de alcohol. Al mismo tiempo se vaca el dep osito
a raz on de 5 litros/minuto. Suponiendo que la solucion se agita constantemente,
calcular la cantidad de alcohol que queda despues de 10 minutos.
5. Una alberca cuyo volumen es de 10000 galones contiene agua con cloro al 0,01 %. A
partir del instante t = 0, se bombea agua del servicio publico con cloro al 0,001 %
hacia la alberca, a razon de 5 galones/minuto. El agua sale de la alberca con la
misma raz on. Cu al es el porcentaje de cloro en la alberca despues de 1 hora? En
que momento el agua de la alberca tendra 0,002 %5 de cloro?
6. La sangre conduce un medicamento a un organo a raz on de 3 cm
3
/s y sale con la
misma razon. El organo tiene un volumen lquido de 125 cm
3
. Si la concentracion
del medicamento en la sangre que entra al organo es de 0,2 g/cm
3
, Cu al es la
concentraci on del medicamento en el organo en el instante t, si inicialmente no
haba rastros de dicho medicamento? En que momento llegara la concentracion
del medicamento en el organo a 0,1 g/cm
3
?
100CAP
ITULO3. APLICACIONES DE LAS ECUACIONES DIFERENCIALES DE PRIMER ORDEN
7. Un objeto de 400 libras se libera desde el reposo a 500 pies sobre el suelo y se le
permite caer bajo la inuencia de la gravedad. Suponiendo que la fuerza en libras
debida a la resistencia del aire es 10v, donde v es la velocidasd del objeto en pies/s,
determine la ecuacion de movimiento del objeto. En que momento tocara el objeto
el suelo?
3.4. Trayectorias Ortogonales
Dos curvas se cortan en angulo recto si las respectivas rectas tangentes, en los puntos de
intersecci on, son rectas perpendiculares.
Denici on 3.8. Cuando todas las curvas de una familia F(x, y, c
1
) = 0 cortan ortogo-
nalmente a todas las curvas de otra familia G(x, y, c
2
) = 0, se dice que las familias son
ortogonales. Esto signica que cada curva de la familia F(x, y, c
1
) = 0 corta en angulo
recto a toda curva de la otra familia G(x, y, c
2
) = 0.
Ejemplo 3.9. En la gura (3.3) se ve que la familia de rectas que pasan por el origen
y = c
1
x y la familia de crculos concentricos con centro en el origen x
2
+ y
2
= c
2
son
trayectorias ortogonales.
Figura 3.3:
Para encontrar las trayectorias ortogonales de una familia de curvas F(x, y, c
1
) = 0, se
halla de esta ecuacion (por diferenciac on implcita) la derivada
dy
dx
, que usualmente se
3.4. TRAYECTORIAS ORTOGONALES 101
puede expresar de la forma siguente:
dy
dx
= r(x, y)
_
r(x, y) =
F/x
F/y
, en todo punto (x, y) de F(x, y, c
1
) = 0 donde
F
y
= 0
_
.
La ecuacion de la familia ortogonal es dada, en forma diferencial, por la ecuacion
2
dy
dx
=
1
r(x, y)
.
Al eliminar la constante c
1
entre el par de ecuaciones
F(x, y, c
1
) = 0
dy
dx
=
1
r(x, y)
y resolver la ecuaci on diferencial resultante (si es que es posible), obtenemos una repre-
sentaci on algebraica de la familia ortogonal a la familia F(x, y, c
1
) = 0.
Ejemplo 3.10. Hallar las trayectorias ortogonales de la familia de curvas y = e
kx
.
Solucion. La derivada de y = e
kx
es:
dy
dx
= ke
kx
despejamos k de y = e
kx
, ln(y) = kx, k =
ln(y)
x
, x = 0 y reemplazando se obtiene:
dy
dx
=
ln(y)
x
e
ln(y)
dy
dx
=
y ln(y)
x
La ecuacion diferencial de la familia ortogonal es
dy
dx
=
x
y ln(y)
esta ultima ecuaci on se resuelve por variables separables:
2
Esta expresion esta inspirada en el hecho que dos rectas son perpendiculares si el producto de sus
pendientes es 1.
102CAP
ITULO3. APLICACIONES DE LAS ECUACIONES DIFERENCIALES DE PRIMER ORDEN
y ln(y)dy = xdx
_
y ln(y)dy =
_
xdx
y
2
ln(y)
2
y
2
4
=
x
2
2
+ c
2
2y
2
ln(y) y
2
+ 2x
2
= 4c
2
2y
2
ln(y) y
2
+ 2x
2
= c
3
en donde por conveniencia se reemplazo 4c
2
por c
3
.
3.5. Mecanica de Newton
La mec anica es el estudio del movimiento de los objetos y el efecto de las fuerzas que
act uan sobre tales objetos. la mec anica de Newton o cl asica, trata del movimiento de los
objetos comunes es decir, de los objetos que son grandes en comparaci on con un atomo
y lentos en comparaci on con la velocidad de la luz.
Un modelo de la mecanica de Newton se puede basar en las leyes del movimiento de
Newton:
1. En ausencia de fuerzas, un objeto (cuerpo) en descanso seguira en descanso, y un
cuerpo moviendose a una velocidad constante en lnea recta, lo continuara haciendo
indenidamente.
2. Cuando un cuerpo se sujeta a una o m as fuerzas externas, la raz on de cambio tem-
poral del momento del cuerpo es igual a la suma vectorial de las fuerzas externas
que act uan sobre el.
3. Cuando un cuerpo interact ua con otro, la fuerza del primer cuerpo sobre el segundo
es igual en magnitud, pero opuesta en direccion, a la fuerza del segundo cuerpo sobre
el primero.
La segunda ley de Newton que s olo se aplica a marcos de referencia inerciales, nos permite
formular las ecuaciones de movimiento para un cuerpo. Podemos expresar la segunda ley
de Newton como
dp
dt
= F(t, x, v).
3.5. MEC
ANICA DE NEWTON 103
donde F(t, x, v) es la fuerza resultante sobre el cuerpo en el instante t, posici on x, velo-
cidad v y p(t) es el momento del cuerpo en el instante t. El momento es el producto de
la masa del cuerpo y su velocidad, es decir,
p(t) = mv(t)
de modo que podemos expresar la segunda ley de Newton como
m
dv
dt
= ma = F(t, x, v) (3.11)
donde a =
dv
dt
es la aceleraci on del cuerpo en el instante t.
En esta seccion nos centraremos en situaciones donde la fuerza F no depende de x. Luego
la ecuacion de primer orden en v(t) es:
m
dv
dt
= ma = F(t, v). (3.12)
Ejemplo 3.11. Un objeto de masa 5 Kg recibe una velocidad inicial hacia abajo de
50m/s y luego se le permite caer bajo la inuencia de la gravedad. Suponga que la fuerza
en newtons debida a la resistencia del aire es 10v, donde v es la velocidad del objeto
en m/s. Determine la ecuacion de movimiento del objeto. Si el objeto est a inicialmente
a 500 m sobre el suelo, determine el momento en que el objeto golpear a el suelo.(Figura
3.4)
Figura 3.4:
104CAP
ITULO3. APLICACIONES DE LAS ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Solucion. Hay dos fuerzas actuando sobre el objeto: una fuerza constante debida al em-
puje hacia abajo de la gravedad y una fuerza debida a la resistencia del aire que es
proporcional a la velocidad del objeto y actu an en forma opuesta al movimiento del ob-
jeto. Por lo tanto, el movimiento del objeto se realizara a lo largo de un eje vertical.
En este eje, elegimos el origen como el punto donde el objeto fue lanzado inicialmente y
denimos x(t) como la distancia que ha caido el objeto hasta el instante t
Las fuerzas que act uan sobre el objeto a lo largo de este eje se pueden expresar de la
siguiente manera:
La fuerza debida a la gravedad es
F
1
= mg
donde g es la aceleraci on debida a la gravedad en la supercie de la tierra.
La fuerza debida a la resistencia del aire es
F
2
= bv(t)
donde b > 0 es la constante de proporcionalidad y el signo negativo est a presente
debido a que la resistencia del aire act ua en forma opuesta al movimiento del objeto.
La fuerza neta que act ua en el objeto es:
F = F
1
+ F
2
= mg bv(t) (3.13)
ahora utilizando la ecuaci on (3.11) y sustituyendo en (3.12) se obtiene:
m
dv
dt
= ma = F(t, v)
m
dv
dt
= mg bv, v(0) = v
0
(3.14)
donde m = 5kg, v
0
= v(0) = 50
m
seg
, b = 10, g = 9,81
m
seg
2
. Reemplazando en (3.14)
obtenemos:
5kg
dv
dt
= 5kg 9,81
m
seg
2
10v(t)N
dv
dt
=
5kg
5kg
9,81
m
seg
2
10N
5kg
v(t)
dv
dt
= 9,81
m
seg
2
2
m
seg
2
v(t)
dv
dt
+ 2v(t) = 9,81
3.5. MEC
ANICA DE NEWTON 105
utilizando variables separables o lineal obtenemos:
v(t) = 4,905 + ce
2t
como v(0) = 50 se obtiene, c = 45,095. Entonces
v(t) = 4,905 + 45,095e
2t
.
Para hallar la ecuaci on de movimiento primero resolvemos la ecuaci on diferencial
v(t) =
dv
dt
= 4,905 + 45,095e
2t
donde
x(t) = 4,905t 22,55e
2t
+ k (3.15)
como hemos considerado que x = 0 cuando t = 0, reemplazando en (3.15) obtenemos
k = 22,55. Por lo tanto, la ecuacion de movimiento es:
x(t) = 4,905t 22,55e
2t
+ 22,55
como el objeto se liber o a 500m sobre el suelo, podemos determinar el momento en que
el objeto toca el suelo haciendo x(t) = 500 y despejando t. As escribimos
x(t) = 4,905t 22,55e
2t
+ 22,55
o
t 4,59e
2t
= 97,3. (3.16)
La ecuacion (3.16) no se puede resolver de manera explcita en terminos de t. Para
resolverla tomamos el hecho que e
2t
ser a muy peque no para t, es decir ignoramos el
termino e
2t
y obtenemos como aproximacion t 97,3 segundos.
Ejemplo 3.12. Un paracaidista cuya masa es de 75 Kg se arroja de un helicoptero
que vuela a 2000 m sobre el suelo y cae hacia este bajo la inuencia de la gravedad.
Suponga que la fuerza debida a la resistencia del aire es proporcional a la velocidad del
paracaidista, con la constante de proporcionalidad b
1
= 30 Ns/m cuando se abre, si el
paracadas esta cerrado y b
2
= 90 Ns/m cuando esta abierto. Si el paracadas no se
abre hasta que la velocidad del paracaidista es de 20 m/s. despues de cu antos segundos
llegar a al suelo?
106CAP
ITULO3. APLICACIONES DE LAS ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Solucion. S olo nos interesa el momento en que la paracaidista toca el suelo, no el lugar.
As, s olo consideramos el componente vertical de su descenso. Para esto, necesitamos usar
dos ecuaciones, una para describir el movimiento antes de abrir el paracadas y la otra
para aplicar despues de abrirlo.
Antes de abrirse: m = 75 kg, v
0
= v(0) = 0, b = b
1
= 30 Ns/m, g = 9,81
m
seg
2
y
x(0) = 0.
Reemplazando en (3.14) tenemos
75
dv
dt
= 75 9,81 30v(t)
dv
dt
= 9,81
m
seg
2
0,4v(t)
dv
dt
+ 0,4v(t) = 9,81
utilizando variables separables o lineal obtenemos:
v
1
(t) = 24,53 + ce
0,4t
como v(0) = 0 se obtiene, c = 24,53 entonces v
1
(t) = 24,53 24,53e
0,4t
y
x
1
(t) = 24,53t
1
+ 61,31e
0,4t
1
61,31
como el paracadas se abre hasta que la velocidad es de 20m/s es decir velocidad nal.
Se puede hallar el tiempo que recorri o. Por lo tanto
20 = 24,53 24,53e
0,4t
t
1
= 4,22seg
y ha cado
x
1
(4,22) = 24,53(4,22) + 61,31e
0,4(4,22)
61,31 = 53,54
(en estos y otros c alculos, redondearemos nuestras cifras a dos cifras decimales). Ahora,
al abrirse el paracadas, el paracaidista esta a 2000 53,54 = 1946,46 metros sobre el
suelo.
Ahora consideramos el caso despues de abrirse: m = 75kg, v
0
= v(0) = 20
m
seg
,
b =
2
= 90N s/m, g = 9,81
m
seg
2
y x
2
(0) = 0, por lo tanto
x
2
(t) = 8,12t
2
+ 9,85 9,85e
1,2t
2
3.6. CALENTAMIENTO Y ENFRIAMIENTO DE EDIFICIOS 107
para determinar el momento en que el paracaidista llega al suelo, hacemos x
2
(t) = 1946,46
m, la altura a la que estaba el paracaidista al abrir su paracadas. Esto da como resultado
1946,46 = 8,12t
2
+ 9,85 9,85e
1,2t
2
238,5 = t
2
1,21e
1,2t
2
(3.17)
La ecuacion (3.17) no se puede resolver de manera explcita en terminos de t. Para
resolverla tomamos el hecho que e
1,2t
ser a muy peque no para t, es decir, ignoramos
el termino e
1,2t
y obtenemos como aproximacion t
2
238,5 segundos. Por lo tanto
golpear a el suelo 238,5 seg despues de arrojarse desde el helic optero.
3.6. Calentamiento y Enfriamiento de Edicios
La idea consiste en formular un m odelo matem atico que describa el perl de temperatura
dentro de un edicio durante 24 horas, como funcion de la temperatura exterior, el calor
generado dentro del edicio y el calefactor o aire acondicionado.
Sea T(t) la temperatura dentro del edicio en el instante t y veamos al edicio como un
unico comportamiento. La razon de cambio en la temperatura queda determinada por
todos los factores que generan o disipan calor.
Factores que afectan la temperatura dentro del edicio.
Calor generado por las personas, las luces y las m aquinas dentro del edicio. Esto
incrementa la temperatura y se denota por H(t). Siempre es positiva.
Calentamiento o enfriamiento proporcionado por calefacci on o aire acondicionado.
Esta raz on de incremento (o decremento) de temperatura se denota por U(t). Que
es positiva para calefacci on y negativa para aire acondicionado. Se tiene que H(t)
y U(t) estan en terminos de temperatura por unidad de tiempo.
Efecto de la temperatura exterior M(t) sobre la temperatura dentro del edicio.
El tercer factor lo podemos modelar mediante la ley de enfriamiento de Newton. Esta ley
establece que la raz on de cambio de la temperatura T(t) es proporcional a la diferencia
entre la temperatura exterior M(t) y la temperatura interior T(t). Es decir:
dT
dt
= K[M(t) T(t)]
108CAP
ITULO3. APLICACIONES DE LAS ECUACIONES DIFERENCIALES DE PRIMER ORDEN
la constante depende de las propiedades fsicas del edicio, como cantidad de puertas,
ventanas y el tipo de aislamiento. Por lo tanto
dT
dt
= K[M(t) T(t)] + H(t) + U(t) (3.18)
donde
dT
dt
+ KT(t) = KM(t) + H(t) + U(t)
es una ecuaci on diferencial lineal. Con
p(t) = K
Q(t) = KM(t) + H(t) + U(t).
El factor integrante es
(t) = e
Kdt
= e
Kt
utilizando la formula (2.10) nos resulta
T(t) = e
Kt
__
e
Kt
[KM(t) + H(t) + U(t)]dt + c
_
y
1
K
es la constante de tiempo para el edicio (sin calefacci on o aire acondicionado).
Ejemplo 3.13. En una calurosa ma nana de sabado, cuando las personas trabajan dentro
del edicio, el aire acondicionado mantiene la temperatura interior en 24
0
C. A medioda,
el aire acondicionado se apaga y las personas se van a casa. La temperatura exterior
es constante e igual a 35
0
C durante el resto de la tarde. Si la constante de tiempo del
edicio es de 4 horas, cu al ser a la temperatura dentro del edicio a las 2 : 00P.M.? Y
a las 6 : 00P.M.? En que momento llegara la temperatura interior del edicio a 27
0
C?
Solucion. Se tiene M(t) = 35
0
C, T(0) = 24
0
C, H(t) = 0, U(t) = 0,
1
K
= 4 por lo tanto
tenemos que K =
1
4
. Hallemos T(2). Reemplazando en la ecuaci on
T(t) = e
Kt
__
e
Kt
[KM(t) + H(t) + U(t)]dt + c
_
obtenemos:
T(t) = e
1
4
t
__
e
1
4
t
1
4
35dt + c
_
T(t) = e
1
4
t
_
e
1
4
t
35 + c
_
T(t) = 35 + ce
1
4
t
.
3.6. CALENTAMIENTO Y ENFRIAMIENTO DE EDIFICIOS 109
como T(0) = 24
0
C tenemos:
24
0
C = 35
0
C + ce
1
4
t
c = 11.
Por lo tanto, T(2) = 35 11e
1
4
t
de donde reemplazando podemos hallar T(t) = 35
11e
1
4
2
= 28,32
0
C.
La temperatura a las 2 : 00P.M. es de 28,32
0
C. La temperatura a las 6 : 00P.M. es
de 32,54
0
C. Para hallar en que momento la temperatura llega a 27
0
C reemplazamos en
T(t) = 3511e
1
4
t
, es decir, 27 = 3511e
1
4
t
, despejando t obtenemos t = 1 : 16P.M.
Ejemplo 3.14. Se va a construir un almacen sin calefaccion ni aire acondicionado. Seg un
la cantidad de aislamiento, la constante de tiempo para este edicio puede variar de 1 a
5 horas. Para ilustrar el efecto del aislamiento sobre la temperatura dentro del almacen,
suponga que la temperatura exterior vara como una onda senoidal, con un mnimo de
16
0
C a las 2 : 00A.M. y un m aximo de 32
0
C a las 2 : 00P.M. Suponiendo que el
termino exponencial (que implica la temperatura inicial T
0
) se ha extinguido, cu al es
la temperatura mnima dentro del edicio, si la constante de tiempo es 1 hora? Y si la
constante de tiempo es 5 horas? Cual es la maxima temperatura dentro del edicio si
la constante de tiempo es 1 hora? Y si es 5 horas?
Solucion. Como M(t) vara como una onda senoidal en un periodo de 24 horas, con un
mnimo 16
0
C a las 2 : 00A.M., y un m aximo de 32
0
C a las 2 : 00P.M., t = 12. Es decir
M(t) = M
0
Bcos(wt)
donde B es una constante positiva, M
0
es la temperatura exterior promedio,
M(t) =
32 + 16
2
= 24
0
C y w =
2
24
=
12
radianes
hora
.
Adem as U(t) = 0 porque no hay calefacci on ni aire acondicionado. H(t) = H
0
= 0 no
hay raz on de calentamiento dentro del edicio. De la ecuaci on (3.18) tenemos
dT
dt
= K
_
M
0
Bcos(wt) T(t)
+ H
0
dT
dt
+ KT = K
_
M
0
Bcos(wt)
+ H
0
(3.19)
110CAP
ITULO3. APLICACIONES DE LAS ECUACIONES DIFERENCIALES DE PRIMER ORDEN
hacemos B
0
= M
0
+
H
0
K
, reemplazando en (3.19) tenemos que:
dT
dt
+ KT = K
_
B
0
Bcos(wt)
donde KB
0
representa el valor promedio diario de KB
0
KBcos(wt), es decir:
KB
0
=
1
24
_
24
0
_
KB
0
KBcos(wt)
_
dt
la solucion de la ecuaci on es:
T(t) = e
Kt
__
e
Kt
_
KB
0
KBcos(wt)
dt + c
_
T(t) = B
0
B
_
cos(wt) +
w
K
sin(wt)
_
1 +
_
w
t
_
2
+ ce
Kt
para t = 0 y T
0
= 16
0
C reemplazando en la ultima ecuacion se tiene:
16 = B
0
B
1 +
_
w
t
_
2
+ c
por lo tanto
c = 16 B
0
+
B
1 +
_
w
t
_
2
es decir
T(t) = B
0
B
_
cos(wt) +
w
K
sin(wt)
_
1 +
_
w
t
_
2
+
_
16 B
0
+
B
1 +
_
w
t
_
2
_
e
Kt
como H
0
= 0, B
0
= M
0
es decir, cuando no hay razon de calentamiento adicional dentro
del edicio
_
H
0
= 0
_
la temperatura promedio interior B
0
es igual a la temperatura
promedio exterior M
0
. Por lo tanto B
0
= 24
0
C. Como el termino exponencial se ha
extinguido, entonces c = 0. Reemplazando tenemos:
T(t) = 24
B
_
cos(wt) +
w
k
sin(wt)
_
1 +
_
w
t
_
2
3.6. CALENTAMIENTO Y ENFRIAMIENTO DE EDIFICIOS 111
para hallar el valor de B tomamos
M(t) = M
0
Bcos(wt)
M(t) = 24 Bcos
_
12
t
_
para t = 0 y M(t) = 16 se tiene B = 8. Por lo tanto:
T(t) = 24
8
_
cos(wt) +
w
K
sin(wt)
_
1 +
_
w
t
_
2
para hallar la temperatura mnima para t = 0,
1
K
= 1, se tiene K = 1 y tomamos w =
2
24
que es aproximadamente
1
4
reemplazando en la ultima ecuacion obtenemos:
T(0) = 24
8
1 +
_
1
4
_
2
= 16,4
0
C
para
1
K
= 5, se tiene K =
1
5
. La temperatura mnima es
T(0) = 24
8
1 +
_
5
4
_
2
= 20,8
0
C.
para hallar la temperatura maxima t = 12,
1
K
= 1, se tiene K = 1
T(12) = 24 +
8
1 +
_
1
4
_
2
= 31,5
0
C
para
1
K
= 5, se tiene K =
1
5
la temperatura m axima es
T(12) = 24 +
8
1 +
_
5
4
_
2
= 27,1
0
C
Ejemplo 3.15. Durante el verano, la temperatura dentro de una camioneta llega a 55
0
C,
mientras que en el exterior es constante e igual a 35
0
C. Cuando la conductora entra a la
camioneta, enciende el aire acondicionado con el termostato en 16
0
C. Si la constante de
tiempo para la camioneta es
1
K
= 2 horas y para la camioneta con el aire acondicionado
es
1
K
1
=
1
3
hora , en que momento llegar a la temperatura dentro de la camioneta a los
27
0
C?
112CAP
ITULO3. APLICACIONES DE LAS ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Solucion.
1
K
1
es la constante de tiempo con calefaccion y aire acondicionado donde
K
1
= K + Ku. En la camioneta se instala un termostato que se utiliza para compa-
rar la temperatura real dentro de la camioneta con una temperatura deseada T
D
. Si la
temperatura real es menor que la temperatura deseada, el calefactor comienza a funcio-
nar y en caso contrario se desconecta. Si la temperatura real es mayor que la temperatura
deseada, el aire acondicionado comienza a enfriar y en caso contrario se desconecta. Si la
cantidad de calentamiento es proporcional a la diferencia de temperatura; es decir;
U(t) = K
u
_
T
D
T(t)
(3.20)
donde K
u
es la constante de proporcionalidad (positiva).
Se tiene M(t) = 35
0
C, T(t) = 55
0
C, H(t) = 0, T
D
= 16
0
C,
1
K
= 2 entonces K =
1
2
,
1
K
1
=
1
3
, entonces K
1
= 3. Como U(t) = K
u
_
T
D
T(t)
de la ecuaci on (3.15) se tiene
dT
dt
= K
_
M(t) T(t)
+ K
u
_
T
D
T(t)
dT
dt
+ T
_
K + K
u
= KM(t) + K
u
T
D
(3.21)
vemos que para este ejemplo, la cantidad p(t) = K es igual a K + K
u
, por lo tanto
K
1
= K + K
u
3 =
1
2
+ K
u
K
u
=
5
2
reemplazando en (3.21) tenemos:
dT
dt
+ 3T =
1
2
35 +
5
2
16
dT
dt
+ 3T =
115
2
la cual es una ecuacion diferencial lineal. Su factor integrante es: (t) = e
3t
, por lo tanto
la solucion es:
T = e
3t
__
e
3t
115
2
dt + c
_
T = e
3t
_
e
3t
115
6
dt + c
_
T =
115
6
+ ce
3t
3.6. CALENTAMIENTO Y ENFRIAMIENTO DE EDIFICIOS 113
como T(0) = 55, tenemos
55 =
115
6
+ c
c =
215
6
T(t) =
115
6
+
215
6
e
3t
para hallar en que momento la temperatura llegara a 27
0
C reemplazamos en la ultima
ecuaci on y despejamos t.
27 =
115
6
+
215
6
e
3t
t = 0,5068 horas
t = 30,4 minutos.
3.6.0.4. Ejercicios
1. Un objeto de masa 8 Kg recibe una velocidad inicial hacia abajo de 20 m/s y luego se
le permite caer bajo la inuencia de la gravedad. Suponga que la fuerza en Newtons
debida a la resistencia del aire es 16v, donde v es la velocidad del objeto en m/s.
Determine la ecuacion de movimiento del objeto. Si el objeto est a inicialmente a
100 m sobre el suelo, determine el momento en que el objeto golpear a el suelo.
2. Un objeto con masa de 2 Kg se lanza desde el reposo de una plataforma a 30 m sobre
el agua y se deja caer bajo la inuencia de la gravedad. Despues de que el objeto
golpea el agua, comienza a hundirse, con la gravedad jal andolo hacia abajo y una
fuerza de otaci on empuj andolo hacia arriba. Suponga que la fuerza de gravedad
es constante, que no hay cambios en el momento del objeto al golpear el agua,
que la fuerza de otacion es 1/2 del peso (peso = mg), y que la fuerza debida
a la resistencia del aire o del agua es proporcional a la velocidad del objeto, con
constante de proporcionalidad b
1
= N s/m en el aire y b
2
= N s/m en el agua.
Determine la ecuacion de movimiento del objeto. Cual es la velocidad del objeto
minuto despues de ser arrojado?.
3. Un paracaidista cuya masa es de 100 Kg se arroja de un helicoptero que vuela a
3000 m sobre el suelo y cae bajo la inuencia de la gravedad. Suponga que la fuerza
debida a la resistencia del aire es proporcional a la velocidad del paracaidista, con
114CAP
ITULO3. APLICACIONES DE LAS ECUACIONES DIFERENCIALES DE PRIMER ORDEN
la constante de proporcionalidad b
3
= N-s/m cuando el paracadas est a cerrado y
b
4
= N-s/m cuando se abre. Si el paracadas no se abre hasta 30 segundos despues
de que el paracaidista sale del helicoptero, despues de cu antos segundos llegara el
al suelo? Si el paracadas no se abre hasta 1 minuto despues de que el paracaidista
sale del helic optero, despues de cuantos segundos llegar a el al suelo?
4. Un objeto con masa de 100 Kg se lanza desde el reposo de una lancha hacia el
agua y se deja hundir. Aunque la gravedad jala el objeto hacia abajo, una fuerza
de otacion de 1/40 veces el peso del objeto lo empuja hacia arriba (peso = mg). Si
suponemos que la resistencia del agua ejerce sobre el objeto una fuerza proporcional
a la velocidad del objeto, con constante de proporcionalidad 10 N-s/m. Determine
la ecuaci on de movimiento del objeto. Despues de cuantos segundos ocurrira que
la velocidad del objeto es igual a 70 m/s?
5. Un objeto de masa mse libera desde el reposo y cae bajo la inuencia de la gravedad.
Si la magnitud de la fuerza debida a la resistencia del aire es bv
n
, donde b y n son
constantes positivas, determine la velocidad lmite del objeto (suponiendo que este
lmite existe). (Sugerencia: Justique que la existencia de una velocidad lmite
(nita) implica
dv
dt
0 cuando t +).
6. Cuando la velocidad v de un objeto es muy grande, la magnitud de la fuerza debida
a la resistencia del aire es proporcional a v
2
y la fuerza act ua en direccion opuesta
al movimiento del objeto. Un proyectil con masa de 3Kg se lanza desde el suelo,
hacia arriba y con una velocidad inicial de 500 m/s. Si la magnitud de la fuerza
debida a la resistencia del aire es (0,1)v
2
, en que momento alcanzar a el proyectil
su maxima altura sobre el suelo? Cual es esa m axima altura?.
7. Si un objeto cae desde un aeroplano la velocidad hacia abajo despues de x seg es
aproximadamente y
=
g
k
(1 e
kx
) en donde g = 9,8
m
seg
2
y k = 0, 2seg
1
. y(x) es la
distancia que a cado, por lo tanto y(0) = 0. Si este objeto cae desde una altura de
5000 mts. Cuanto le tomar a llegar a la tierra?. Calcule esto.
8. Encuentre las trayectorias ortogonales a la familia:
a) y = x 1 + c
1
e
x
.
b) y =
1
x+c
1
.
c) y = x
k
, para x > 0, c > 0.
d) xy = c.
9. Determine el valor de a para que las familias de curvas y
3
= C
1
x y x
2
+ ay
2
= C
2
sean ortogonales.
3.6. CALENTAMIENTO Y ENFRIAMIENTO DE EDIFICIOS 115
10. Era el medioda en un fro da de diciembre en Tampa: 16
0
C. El detective Taylor
lleg o a la escena del crimen para hallar al sargento sobre el cadaver. El sargento dijo
que haba varios sospechosos. Si supiera el momento exacto de la muerte, podran
reducir la lista de sospechosos. El detective Taylor sac o un term ometro y midi o la
temperatura del cuerpo: 34, 5
0
C. Luego sali o a comer. Al regresar, a la 1 : 00P.M.,
hall o que la temperatura del cuerpo era de 33, 7
0
C. En que momento ocurri o el
asesinato? [Sugerencia: la temperatura normal del cuerpo es de 37
0
C.]
11. En una fresca ma nana de s abado, mientras las personas trabajan en el interior,
el calefactor mantiene la temperatura interior del edicio en 21
0
C. A medioda,
el aparato se apaga y los empleados se van a casa. La temperatura exterior es
constante e igual a 12
0
C durante el resto de la tarde. Si la constante de tiempo
para el edicio es de 3 horas, en que momento llegara la temperatura del edicio
a 16
0
C? Si algunas ventanas se dejan abiertas y la constante de tiempo se reduce
a 2 horas, en que momento llegar a la temperatura interior a 16
0
C?.
12. Una cochera sin calefacci on ni aire acondicionado tiene una constante de tiempo de
2 horas. Si la temperatura exterior vara como una onda senoidal con un mnimo
de 50
0
F a las 2 : 00A.M.. y un m aximo de 80
0
F a las 2 : 00P.M., determine los
instantes en que el edicio alcanza su temperatura maxima y mnima, suponiendo
que el termino exponencial se extingue.
13. Un lunes temprano por la ma nana, la temperatura en la sala de lectura ha des-
cendido hasta 40
0
F, igual a la temperatura exterior. A las 7 : 00a.m., el conserje
enciende el calefactor con el termostato puesto en 70
0
F. La constante de tiempo
para el edicio es 1/K = 2 horas y la constante de tiempo para el edicio junto
con su sistema de calentamiento es 1/K1 = 1/2 hora. Suponiendo que la tempera-
tura exterior permanece constante, cual ser a la temperatura dentro de la sala de
lectura a las 8 : 00a.m.? En que momento llegara la temperatura dentro de la sala
a 65
0
F?.
116CAP
ITULO3. APLICACIONES DE LAS ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Captulo 4
Ecuaciones Diferenciales Lineales de
Orden Superior
En este captulo presentamos metodos de soluci on de ecuaciones diferenciales lineales de
orden mayor o igual que dos.
Como vimos anteriormente una ecuacion diferencial de orden n lineal es una ecuaci on de
la forma:
a
n
(x)
d
n
y
dx
n
+ a
n1
(x)
d
n1
y
dx
n1
+ + a
1
(x)
dy
dx
+ a
0
(x)y = g(x)
Si g(x) = 0 se dice que es homogenea.
Si g(x) = 0 se dice que es no homogenea.
Si las funciones a
i
(x) para i = 1, 2, , n son constantes, es decir, a
i
(x) = a
i
R
para 0 i n, entonces se dice que la ecuacion lineal es de coecientes constantes.
4.1. Teora preliminar
Teorema 4.1. Existencia y unicidad de soluciones para ecuaciones lineales
de orden n.
Dada la ecuacion diferencial lineal de orden n:
a
n
(x)
d
n
y
dx
n
+ a
n1
(x)
d
n1
y
dx
n1
+ + a
1
(x)
dy
dx
+ a
0
(x)y = g(x)
117
118CAP
ITULO4. ECUACIONES DIFERENCIALES LINEALES DE ORDENSUPERIOR
Suponga que g(x), a
i
(x), con i = 0, 1, 2, , n, son funciones continuas en un intervalo
(a, b), que contiene al punto x
0
. Entonces, para cualquier eleccion de los valores iniciales
y
0
, y
1
, , y
n1
, existe una unica solucion y(x) en todo el intervalo (a, b) del problema
con valor inicial
y(x
0
) = y
0
, y
(x
0
) = y
1
, , y
n1
(x
0
) = y
n1
.
Nota. Desde el punto de vista geometrico, la unicidad en el teorema permite arma que
si dos curvas soluci on que pasan por el mismo punto deben ser identicas en todo intervalo
(a, b).
4.1.1. Operadores Diferenciales Lineales
Sea la ecuaci on
d
2
y
dx
2
+ p(x)P
dy
dx
+ q(x)y = g(x).
La expresion del lado izquierdo de la ecuacion, por conveniencia la escribimos como:
y
(x) + p(x)y
(x) + q(x)y(x). (4.1)
Dada cualquier funci on y con segunda derivada continua en un intervalo I, la ecuacion
(4.1) genera una nueva funcion que denotamos por L[y]. Esto es
L[y] := y
+ py
+ qy (4.2)
lo que hemos hecho es asociar a tal funci on y la funcion L[y], que signica una trans-
formaci on que asocia a cada elemento de su dominio un unico elemento en su imagen.
As, L se puede interpretar como una funcion denida en un conjunto de funciones. Su
dominio es la coleccion de funciones con segundas derivadas continuas; su imagen consta
de todas las funciones continuas y la regla de correspondencia esta dada por (4.2). Tales
transformaciones las llamaremos operadores. Como L implica la derivaci on, decimos que
L es un operador diferencial.
4.1.1.1. Linealidad Del Operador Diferencial
Lema 4.2. sea L[y] := y
+p(x)y
+q(x)y. Si y, y
1
, y y
2
son cualesquiera funciones dos
veces diferenciables en el intervalo I y si c es constante, entonces
(i.) L[y
1
+ y
2
] = L[y
1
] + L[y
2
]
(ii.) L[cy] = cL[y]
4.1. TEOR
IA PRELIMINAR 119
Demostracion. 1. Probemos (i.)
L[y
1
+ y
2
] = (y
1
+ y
2
)
+ p(y
1
+ y
2
)
+ q(y
1
+ y
2
)
= y
1
+ y
2
+ p(y
1
+ y
2
) + q(y
1
+ y
2
)
=
_
y
1
+ py
1
+ qy
1
_
+
_
y
2
+ py
2
+ qy
2
_
= L[y
1
] + L[y
2
]
2. Ahora probemos (ii.)
L[cy] = (cy)
+ p(cy)
+ q(cy)
= cy
+ pcy
+ qcy
= c(y
+ py
+ qy)
= cL[y]
Teorema 4.3. [Combinaciones Lineales de Soluciones]: Sean y
1
y y
2
soluciones
de la ecuacion homogenea
y
+ py
+ qy = 0, (4.3)
entonces cualquier combinacion lineal c
1
y
1
+c
2
y
2
de y
1
y y
2
, donde c
1
y c
2
son constantes,
tambien es una solucion de (4.3).
Demostracion. Si L[y] := y
+ py
+ qy, entonces L[y
1
] = 0 y L[y
2
] = 0, ya que y
1
y y
2
son soluciones de (4.3). Como L es lineal tenemos:
L[c
1
y
1
+ c
2
y
2
] =L[c
1
y
1
] + L[c
2
y
2
]
=c
1
L[y
1
] + c
2
L[y
2
]
=c
1
0 + c
2
0
=0.
As c
1
y
1
+ c
2
y
2
es una soluci on de la ecuaci on (4.3).
4.1.2. Soluciones fundamentales de ecuaciones homogeneas
Teorema 4.4. Sean y
1
y y
2
dos soluciones en (a, b) de
y
+ p(x)y
+ q(x)y = 0. (4.4)
120CAP
ITULO4. ECUACIONES DIFERENCIALES LINEALES DE ORDENSUPERIOR
Donde p y q son continuas en un intervalo (a, b). Suponga que en cierto punto x
0
en
(a, b), estas soluciones satisfacen
y
1
(x
0
)y
2
(x
0
) y
1
(x
0
)y
2
(x
0
) = 0.
Entonces toda solucion de la ecuacion (3.4) en (a, b) se puede expresar como
y(x) = c
1
y
1
(x) + c
12
y
2
(x).
Donde c
1
y c
2
son constantes.
4.1.2.1. Dependencia lineal
Denici on 4.5. El conjunto de funciones {f
1
, f
2
, , f
n
} es linealmente dependiente en
I un intervalo si existen constantes c
1
, c
2
, , c
n
, no todas iguales a 0, tales que
c
1
f
1
+ c
2
f
2
+ + c
n
f
n
0,
es decir
c
1
f
1
(x) + c
2
f
2
(x) + + c
n
f
n
(x) = 0
para toda x en el intervalo.
Si todas las constantes son igual a cero, se dice que {f
1
, f
2
, , f
n
} es linealmente inde-
pendiente.
4.1.2.2. El wronskiano
Denici on 4.6. Dadas las funciones f
1
(x), f
2
(x), , f
n
(x) se dene su Wronskiano
como el determinante:
W(f
1
, f
2
, , f
n
) =
f
1
f
2
f
n
f
1
f
2
f
n
.
.
.
.
.
.
.
.
.
.
.
.
f
n1
1
f
n1
2
f
n1
n
.
El wronskiano es una herramienta muy util para determinar si un conjunto de funciones
es linealmente independiente o dependiente.
Proposicion 4.7. Un conjunto de funciones {f
1
, f
2
, , f
n
} de la ecuacion diferencial
lineal de orden n homogenea
4.1. TEOR
IA PRELIMINAR 121
a
n
(x)
d
n
y
dx
n
+ a
n1
(x)
d
n1
y
dx
n1
+ + a
1
(x)
dy
dx
+ a
0
(x)y = 0
es linealmente independiente en un intervalo I si y s olo si el wronskiano W(f
1
, f
2
, , f
n
)
no es identicamente cero en el intervalo I.
4.1.2.3. Conjunto fundamental de soluciones
Denici on 4.8. Un conjunto de soluciones y
1
, y
2
, , y
n
de
a
n
(x)
d
n
y
dx
n
+ a
n1
(x)
d
n1
y
dx
n1
+ + a
1
(x)
dy
dx
+ a
0
(x)y = 0,
en I es un conjunto fundamental de soluciones si
W(f
1
, f
2
, , f
n
) = 0.
El hecho de tener un conjunto fundamental de soluciones es importante por lo siguiente
Proposicion 4.9. Si y
1
, y
2
, , y
n
en un conjunto fundamental de soluciones de
a
n
(x)
d
n
y
dx
n
+ a
n1
(x)
d
n1
y
dx
n1
+ + a
1
(x)
dy
dx
+ a
0
(x)y = 0.
Y y es cualquier otra solucion de esta ecuacion, entonces existen constantes c
1
, c
2
, , c
n
tales que
y = c
1
y
1
+ c
2
y
2
+ + c
n
y
n
Es decir, un conjunto fundamental es realmente una base para el conjunto de todas las
soluciones de una ecuacion lineal homogenea de orden n. De ah, que
y = c
1
y
1
+ c
2
y
2
+ + c
n
y
n
reciba el nombre de solucion general de tal ecuacion.
Corolario 4.10. Sean y
1
, y
2
, . . . , y
n
soluciones en I de
a
n
(x)
d
n
y
dx
n
+ a
n1
(x)
d
n1
y
dx
n1
+ + a
1
(x)
dy
dx
+ a
0
(x)y = 0,
entonces las siguientes armaciones son equivalentes:
122CAP
ITULO4. ECUACIONES DIFERENCIALES LINEALES DE ORDENSUPERIOR
I. {y
1
, y
2
, , y
n
} es un conjunto fundamental de soluciones en I.
II. y
1
, y
2
, , y
n
son linealmente independientes en I.
III. El wronskiano W(f
1
, f
2
, , f
n
) = 0 en I.
Ejemplo 4.11. Determine si y
1
(x) = e
x
cos(2x), y
2
(x) = e
x
sin(2x) son linealmente
dependientes en el intervalo (0, 1).
Solucion. Para determinar si son linealmente independientes hallamos el Wronskiano de
y
1
y y
2
W(y
1
, y
2
) =
e
x
cos(2x) e
x
sin(2x)
e
x
cos 2x 2e
x
sin(2x) e
x
sin(2x) + 2e
x
cos(2x)
= 2e
2x
.
Donde 2e
2x
es diferente de cero para todos los reales incluyendo el intervalo (0, 1), por
lo tanto es linealmente independiente.
Ejemplo 4.12. Dada la ecuaci on diferencial y
2y
+ 5y = 0
(a.) Determine si y
1
(x) = e
x
cos(2x) y y
1
(x) = e
x
sin(2x) son soluciones linealmente
independientes de la ecuaci on dada.
(b.) Determine una soluci on general de la ecuacion diferencial.
(c.) Determine la soluci on que satisface las condiciones iniciales y(0) = 2, y
(0) = 0.
Solucion: (a.) Hallamos el wronskiano de y
1
y y
2
W(y
1
, y
2
) =
e
x
cos(2x) e
x
sin(2x)
e
x
cos(2x) 2e
x
sin(2x) e
x
sin(2x) + 2e
x
cos(2x)
= 2e
2x
.
Como 2e
2x
es diferente de cero para todos los reales, entonces y
1
, y
2
son linealmente
independientes.
4.2. REDUCCI
ON DE ORDEN. 123
(b.) Para determinar una soluci on general de la ecuaci on diferencial, en primer lugar
sustituimos y
1
y y
2
en y
2y
+5y = 0 para determinar si son soluciones particulares
de la ecuaci on y obtenemos las identidades
3e
x
cos(2x) 4e
x
sin(2x) 2e
x
cos(2x) + 4e
x
sin(2x) + 5e
x
cos(2x) =0
4e
x
cos(2x) 3e
x
sin(2x) 4e
x
cos(2x) 2e
x
sin(2x) + 5e
x
sin(2x) =0.
Como el resultado es 0, y
1
y y
2
son soluciones de la ecuacion diferencial, y lineal-
mente independientes en todos los reales. (Ninguna es m ultiplo escalar de la otra
en R). Por lo tanto por el Corolario 4.10, {e
x
cos(2x), e
x
sin(2x)} es un conjunto
fundamental de soluciones en R, de modo que una soluci on general es
y(x) = c
1
e
x
cos(2x) + c
2
e
x
sin(2x).
(c.) Con las condiciones iniciales y(0) = 2, y
(0) = 0 podemos determinar una solucion
particular, sustituyendo en la ecuaci on diferencial y en su derivada tenemos:
2 =c
1
0 =c
1
+ 2c
2
.
De donde, c
1
= 2 y c
2
= 1. Por lo tanto la solucion que satisface las condiciones
iniciales es:
y(x) = 2e
x
cos(2x) 1e
x
sin(2x).
4.2. Reduccion de Orden.
Este metodo se usa para hallar una segunda solucion de una ecuacion L(y) = 0 cuando
se conoce una soluci on y
1
= g(x) de esta.
Dada la ecuaci on diferencial homogenea de orden n:
a
n
(x)
d
n
y
dx
n
+ a
n1
(x)
d
n1
y
dx
n1
+ + a
1
(x)
dy
dx
+ a
0
(x)y = 0 (4.5)
124CAP
ITULO4. ECUACIONES DIFERENCIALES LINEALES DE ORDENSUPERIOR
y una soluci on no trivial y
1
= g(x), el cambio de variable y = g(x)u transforma la
ecuaci on diferencial dada en una ecuaci on lineal de orden n 1 en la variable w =
du
dx
.
Veamos este caso para n = 2.
Sea
a
2
(x)
d
2
y
dx
2
+ a
1
(x)
dy
dx
+ a
0
(x)y = 0 (4.6)
y una soluci on no nula y
1
= g(x). Tenemos y
2
= g(x)u la segunda soluci on entonces:
y
=g
u + gu
=gu
+ 2g
+ g
u
Sustituyendo en la ecuacion (4.6):
a
2
(x)[gu
+ 2g
+ g
u] + a
1
(x)[g
u + gu
] + a
0
(x)[gu] = 0
[a
2
(x)g
+ a
1
(x)g
+ a
0
(x)g]u + a
2
(x)gu
+ 2a
2
(x)g
+ a
1
(x)gu
= 0.
Podemos ver que el primer corchete toma el valor cero por ser g(x) soluci on de la ecuacion
homogenea, entonces nos queda:
a
2
(x)gu
+ 2a
2
(x)g
+ a
1
(x)gu
= 0.
Ahora llamamos w = u
, la ecuaci on queda:
a
2
(x)gw
+ 2a
2
(x)g
w + a
1
(x)gw = 0.
Luego, al separar las variables e integrar, tenemos
w
w
=
_
2a
2
(x)g
a
2
(x)g
+
a
1
(x)
a
2
(x)
_
_
dw
w
=
_
2g
g
dx
_
a
1
(x)
a
2
(x)
dx
ln |w| =ln(g
2
)
_
a
1
(x)
a
2
(x)
dx
w =g
2
e
a
1
(x)
a
2
(x)
dx.
Reemplazando u
en lugar de w en la ultima ecuacion e integrando obtenemos
4.3. ECUACIONES LINEALES HOMOG
ENEAS CONCOEFICIENTES CONSTANTES125
u(x) =
_
e
a
1
(x)
a
2
(x)
dx
[g(x)]
2
dx.
Esta formula nos da la segunda soluci on linealmente independiente la cual es
y
2
(x) = g(x)
_
e
a
1
(x)
a
2
(x)
dx
[g(x)]
2
dx.
Ejemplo 4.13. Dada la ecuaci on diferencial tx
(t +1)x
+x = 0, t > 0 y una soluci on
no trivial x
1
(t) = e
t
. Determine una segunda soluci on linealmente independiente.
Solucion: En este caso a
2
(t) = t y a
1
(t) = (t + 1) de modo que
_
(t + 1)
t
dt =
_
1 +
1
t
dt = t + ln(t).
Donde hemos considerado que la constante de integraci on se anula. La f ormula para
reducci on de orden implica que
u(t) =
_
e
t+ln(t)
(e
t
)
2
dt =
_
e
t+ln(t)
e
2t
dt = (t + 1)e
t
x
2
(t) =e
t
_
e
t+ln(t)
e
2t
dt = e
t
[e
t
(t + 1)] = (t + 1).
4.3. Ecuaciones lineales homogeneas con coecien-
tes constantes
Vamos a resolver ecuaciones de la forma:
a
n
y
n
+ a
n1
y
n1
+ + a
1
y
+ a
0
y = 0 con a
0
, a
1
, , a
n
R (4.7)
Sabemos que la solucion de una ecuaci on de la forma y
+ay = 0 es: y = ce
ax
, entonces
podemos generalizar el resultado para la ecuacion (4.7) , para resolver esta ecuacion es
necesario determinar n soluciones linealmente independientes.
Suponemos una soluci on de la forma y = e
mx
. El problema se reduce a encontrar los
valores del exponente m que hace que las funciones y = e
mx
sean soluci on de la ecuaci on.
As,
126CAP
ITULO4. ECUACIONES DIFERENCIALES LINEALES DE ORDENSUPERIOR
y = e
mx
, y
= me
mx
, y
= m
2
e
mx
, y
n
= m
n
e
mx
.
Sustituyendo en la ecuacion:
a
n
m
n
e
mx
+ a
n1
m
n1
e
mx
+ + a
1
me
mx
+ a
0
e
mx
= 0
[a
n
m
n
+ a
n1
m
n1
+ + a
1
me
mx
+ a
0
]e
mx
= 0
a
n
m
n
+ a
n1
m
n1
+ + a
1
me
mx
+ a
0
= 0.
Esta ultima ecuaci on es la ecuacion auxiliar (asociada a la ecuaci on diferencial). Los
exponentes buscados son las races del polinomio caracterstico
p(m) = a
n
m
n
+ a
n1
m
n1
+ + a
1
m + a
0
del cual podemos tener varios casos:
El polinomio caracterstico tiene n races reales simples y distintas: m
1
, m
2
, , m
n
.
Por lo tanto, tenemos n soluciones fundamentales de la ecuaci on:
y
1
(x) = e
m
1
x
, y
2
(x) = e
m
2
x
, . . . y
n
(x) = e
mnx
.
Puede vericarse que el Wronskiano es no nulo para todo x R, y por la denicion
(4.8)s epuede concluir que es un conjunto fundamental de soluciones y la soluci on
general de la ecuaci on es:
y(x) = C
1
e
m
1
x
+ C
2
e
m
2
x
+ + C
n
e
mnx
.
Las races del polinomio son reales pero algunas con multiplicidad mayor que uno.
Supongamos que tenemos la ecuaci on ay
+by
+cy = 0 dos races iguales, entonces
y
1
= e
mx
es una solucion, para encontrar la otra utilizamos el metodo de reduccion
de orden, con la formula , y
2
(x) = y
1
(x)
_
e
p(x)dx
[y
1
(x)]
2
dx en este caso p(x) =
b
a
y
m =
b
2a
ya que b
2
4ac = 0 sustituyendo en la ecuaci on obtenemos:
y
2
(x) = e
mx
_
e
b
a
dx
_
e
b
2a
x
_
2
dx
resolviendo la integral obtenemos y
2
= xe
mx
estas dos soluciones son linealmente
independientes y la soluci on general de la ecuacion es:
4.3. ECUACIONES LINEALES HOMOG
ENEAS CONCOEFICIENTES CONSTANTES127
y(x) = C
1
e
mx
+ C
2
xe
mx
y para la ecuaci on (4.7) si la multiplicidad de la raz es n se obtienen, n soluciones
linealmente independientes es decir:
y(x) = C
1
e
mx
+ C
2
xe
mx
+ + C
n
x
n1
e
mx
.
El polinomio tiene un par de races complejas conjugadas :
m
1
=a + ib
m
2
=a ib
Las soluciones fundamentales son y
1
(x) = e
(a+ib)x
, y
2
(x) = e
(aib)x
. Puede tomarse
la expresion de estas exponenciales seg un la f ormula de Euler:
e
(a+ib)x
= e
ax
e
ibx
= e
ax
[cos(bx) + i sin(bx)].
De esta forma podemos escribir las soluciones de la siguiente manera:
C
1
e
x
[cos(bx) + i sin(bx)] + C
2
e
x
[cos(bx) + i sin(bx)]
= C
1
e
x
[cos(bx) + i sin(bx)] + C
2
e
x
[cos(bx) i sin(bx)]
= e
x
[(C
1
+ C
2
) cos(bx) + (iC
1
iC
2
) sin(bx)]
= e
x
[K
1
cos(bx) + K
2
sin(bx)]
Si la multiplicidad de la raz compleja es r la solucion general es:
y =e
x
[K
1
cos(bx) + K
2
sin(bx) + x(K
3
cos(bx) + K
4
sin(bx))
+ + x
r1
(K
2r1
cos(bx) + K
2r
sin(bx))].
Ejemplo 4.14. Determine la soluci on general de la ecuaci on diferencial:
(a.) y
6y
+ 6y = 0.
(b.) 4y
+ 20y
+ 25y = 0.
128CAP
ITULO4. ECUACIONES DIFERENCIALES LINEALES DE ORDENSUPERIOR
(c.) y
+ y
+ 3y = 0.
Solucion: (a.) Si tratamos de hallar la soluci on de la forma y = e
mx
, entonces esto nos
conduce a hallar las races de la ecuacion auxiliar
m
3
6m
2
m + 6 = 0 (4.8)
factorizando obtenemos (m 6)(m 1)(m + 1) = 0. Por lo tanto las races de
la ecuacion auxiliar son 6,1 y -1, de modo que tres soluciones fundamentales de
la ecuacion son e
6x
, e
x
y e
x
y como sabemos que es un conjunto fundamental de
soluciones. La soluci on general es entonces:
y = c
1
e
6x
+ c
2
e
x
+ c
3
e
x
.
b) Si tratamos de hallar la soluci on de la forma y = e
mx
, esto conduce a hallar las
races de la ecuacion auxiliar
4m
2
+ 20m + 25 = 0 (4.9)
factorizando obtenemos (2m + 5)(2m + 5). Por lo tanto tiene una raz
5
2
con
multiplicidad dos, de modo que se tiene dos soluciones fundamentales las cuales
son e
5
2
x
y xe
5
2
x
. La soluci on general es:
y = c
1
e
5
2
x
+ c
2
xe
5
2
x
.
(c.) La ecuacion auxiliar es
m
3
m
2
+ m + 3 = 0 (4.10)
factorizando obtenemos (m + 1)(m
2
2m + 3) = 0. Por lo tanto las races de la
ecuaci on auxiliar son:
m
1
=1
m
2
=
2
4 12
2
=
2
8
2
= 1 i
2.
En este caso = 1, =
2, y as la soluci on general es
y = c
1
e
x
+ c
2
e
x
cos(
2x) + c
23
e
x
sin(
2x).
4.4. ECUACIONES LINEALES NO HOMOG
ENEAS 129
4.4. Ecuaciones lineales no homogeneas
Para obtener la soluci on de una ecuaci on diferencial lineal no homogenea de la forma:
a
2
(x)y
+ a
1
(x)y
+ a
0
(x)y = g(x) donde g(x) = 0
se siguen los siguientes dos pasos
1. Encontrar la soluci on general y
h
de la ecuaci on homogenea
a
2
(x)y
+ a
1
(x)y
+ a
0
(x)y = 0 y despues
2. Encontrar una soluci on particular y
p
de la ecuaci on no homogenea
a
2
(x)y
+ a
1
(x)y
+ a
0
(x)y = g(x)
as, la soluci on general y de la ecuaci on viene dada por
y
h
+ y
p
.
Teorema 4.15. [Principio de Superposicion.] Sea y
1
una solucion de la ecuacion
diferencial L[y](x) = g
1
(x) y sea y
2
una solucion de la ecuacion diferencial L[y](x) =
g
2
(x), donde L es un operador diferencial lineal, entonces pra cualquier constante c
1
y
c
2
, la funcion c
1
y
1
+ c
2
y
2
es una solucion de la ecuacion diferencial
L[y](x) = c
1
g
1
(x) + c
2
g
2
(x).
A continuaci on daremos unos metodos para hallar una soluci on particular de la ecuaci on
lineal no homogenea.
4.4.0.4. Metodo de Coecientes Indeterminados
Vamos a considerara una solucion particular de una ecuaci on diferencial no homogenea
con coecientes constantes para un tipo especial de la g(x). En la tabla 1 damos los tipos
de g(x) que se van a considerar.
Donde el entero no negativo s es el menor entero tal que ning un termino de la soluci on
y
p
sea solucion de la ecuaci on homogenea.
130CAP
ITULO4. ECUACIONES DIFERENCIALES LINEALES DE ORDENSUPERIOR
g(x)
y
p
(x)
1. p
n
(x) = a
n
x
n
+ + a
1
x
1
+ a
0
x
s
p
n
(x) = x
s
(A
n
x
n
+ + A
1
x
1
+ A
0
)
2. ae
x
x
s
Ae
x
3. a cos x + bsenx x
s
(Acos x + Bsenx)
4. p
n
(x)e
x
x
s
(A
n
x
n
+ + A
1
x
1
+ A
0
)e
x
5. p
n
(x) cos x + q
m
(x)senx, don-
de, q
m
(x) = b
m
x
m
+ +b
1
x+b
0
.
x
s
{P
N
(x) cos x + Q
N
(x)senx}, don-
de Q
N
(x) = B
N
x
N
+ + B
1
x + B
0
y
N = max(m, n).
6. ae
x
cos x + be
x
senx x
s
(Ae
x
cos x + Be
x
senx)
7. P
n
(x)e
x
(x) cos x +
q
m
(x)e
x
(x)senx,
x
s
{e
x
(P
N
(x) cos x + Q
N
(x)senx)},
y N = max(m, n).
Ejemplo 4.16. Determinar una solucion general de la ecuaci on:
a) y
4y
+ 4y = xe
2x
b) y
+ 5y
+ 6y = senx cos 2x
Solucion: a) Primero resolvemos la ecuaci on homogenea y
4y
+4y = 0 y obtenemos
como solucion
y
h
= c
1
e
2x
+ c
2
xe
2x
.
Observe que g(x) = xe
2x
es del tipo 4, es decir y
p
= x
s
(Ax +B)e
2x
donde s = 2 ya
que el y
p
es una soluci on de la homogenea por lo tanto se repite dos veces, as
y
p
= x
2
(Ax + B)e
2x
,
para determinar A y B derivamos dos veces y remplazamos en la ecuacion diferen-
cial:
(6Ax + 6Ax
2
+ 6Ax
2
+ 4Ax
3
+ 2B + 4Bx + 4Bx + 4Bx
2
12Ax
2
8Ax
3
8Bx 8Bx
2
+ 4Ax
3
+ 4Bx
2
)e
2x
= xe
2x
Simplicando tenemos:
(4Ax
3
8Ax
3
+ 4Ax
3
) + (12Ax
2
12Ax
2
8Bx
2
+ 4Bx
2
+ 4Bx
2
) + (6Ax 8Bx + 8Bx) + 2B = x
4.4. ECUACIONES LINEALES NO HOMOG
ENEAS 131
y concluimos que:
A =
1
6
y B = 0.
Por lo tanto y
p
=
1
6
x
3
e
2x
, es decir la solucion general es
y = c
1
e
2x
+ c
2
xe
2x
+
1
6
x
3
e
2x
.
b) Primero resolvemos la ecuacion homogenea y
+ 5y
+ 6y = 0 y obtenemos como
soluci on
y
h
= c
1
e
3x
+ c
2
e
2x
.
En este caso g(x) = sin(x) cos(2x) que no es de las formas dadas en la Tabla
1, pero es la suma de dos de tales terminos. Entonces utilizamos el principio de
superposicion, y consideramos por separado las ecuaciones
y
+ 5y
+ 6y =sin(x) (4.11)
y
+ 5y
+ 6y =cos(2x). (4.12)
Para resolver la ecuacion (4.11), g
1
(x) = sin(x) es decir
y
p
1
= x
s
[Acos(x) + Bsin(x)]
donde s = 0 ya que y
p
1
no es una soluci on de la homogenea, por lo tanto y
p
=
Acos(x) +Bsin(x), para determinar A y B derivamos dos veces y remplazamos en
la ecuacion diferencial:
Acos(x) Bsin(x) 5Asin(x) + 5Bcos(x) + 6Acos(x) + 6Bsin(x) = sin(x).
Simplicando tenemos:
5Acos(x) + 5BAcos(x) 5Asin(x) + 5Bsin(x) = sin(x)
y concluimos que:
A =
1
10
y B =
1
10
.
132CAP
ITULO4. ECUACIONES DIFERENCIALES LINEALES DE ORDENSUPERIOR
Por lo tanto, y
p
1
=
1
10
cos(x) +
1
10
sin(x). Ahora resolvemos la ecuaci on (4.12) para
la cual g
2
(x) = cos(2x) es decir
y
p
2
= x
s
[C cos(2x) + Dsin(2x)]
donde s = 0 ya que el y
p
2
no es una solucion de la ecuaci on homogenea, por lo
tanto
y
p
2
= C cos(2x) + Dsin(2x),
para determinar C y D derivamos dos veces y reemplazamos en la ecuaci on dife-
rencial.
4C cos(2x)4Dsin(2x)10C sin(2x)+10Dcos(2x)+6C cos(2x)+6Dsin(2x) = cos(2x).
Simplicando tenemos:
2C cos(2x) + 2Dsin(2x) 10C sin(2x) + 10Dcos(2x) = cos(2x)
y concluimos que
C =
1
52
y D =
5
52
.
Por lo tanto y
p
2
=
1
52
cos(2x)
5
52
sin(2x), es decir la solucion general es
y = C
1
e
3x
+ C
2
e
2x
1
10
cos(x) +
1
10
sin(x)
1
52
cos(2x)
5
52
sin(2x).
4.5. Variacion de Parametros
Este metodo nos proporciona una solucion particular y
p
de la ecuaci on
a
2
(x)y
+ a
1
(x)y
+ a
0
(x)y = g(x) (4.13)
primero escribimos (4.13) en la forma y
+ P(x)y
+ Q(x)y = f(x) dividiendo toda
la ecuaci on por a
2
(x). Ahora encontramos la soluci on de la ecuaci on homogenea y
+
P(x)y
+ Q(x)y = 0 que es y
h
= c
1
y
1
+ c
2
y
2
.
El metodo consiste en proponer una solucion particular de la forma
y
p
= y
1
u
1
(x) + y
2
u
2
(x).
4.5. VARIACI
ON DE PAR
AMETROS 133
Derivando y
p
, y tomando la condicion de u
1
y
1
+ u
2
y
2
= 0 simplicando los c alculos
tenemos:
y
p
=y
1
u
1
+ y
2
u
2
y
p
=y
1
u
1
+ y
1
u
1
+ y
2
u
2
+ y
2
u
2
.
Sustituyendo en (4.13) obtenemos:
y
1
u
1
+y
1
u
1
+y
2
u
2
+y
2
u
2
+P(x)y
1
u
1
+P(x)y
2
u
2
+Q(x)y
1
u
1
+Q(x)y
2
u
2
= f(x) (4.14)
como y
1
y y
2
son soluciones de la ecuacion homogenea se sabe que
y
1
+ P(x)y
1
+ Q(x)y
1
= 0 (4.15)
y
y
2
+ P(x)y
2
+ Q(x)y
2
= 0 (4.16)
por lo tanto tenemos que:
u
1
(y
1
+ P(x)y
1
+ Q(x)y
1
) + u
2
(y
2
+ P(x)y
2
+ Q(x)y
2
) + y
1
u
1
+ y
2
u
2
= f(x)
sustituyendo en (4.15) y (4.16), la ecuacion (4.14) se reduce a
y
1
u
1
+ y
2
u
2
= f(x).
Para hallar u
1
y u
2
tomamos el sistema de ecuaciones
u
1
y
1
+ u
2
y
2
=0
u
1
y
1
+ u
2
y
2
=f(x)
resolviendo por la regla de Cramer tenemos
u
1
=
f(x)y
2
(x)
W[y
1
, y
2
](x)
, u
2
=
f(x)y
1
(x)
W[y
1
, y
2
](x)
donde W[y
1
, y
2
](x) en el denominador es el wronskiano de y
1
y y
2
. Note el wronskiano
nunca se anula ya que {y
1
, y
2
} es un conjunto fundamental de soluciones. Al integrar
estas ecuaciones obtenemos.
134CAP
ITULO4. ECUACIONES DIFERENCIALES LINEALES DE ORDENSUPERIOR
u
1
=
_
f(x)y
2
(x)
W[y
1
, y
2
](x)
dx, u
2
=
_
f(x)y
1
(x)
W[y
1
, y
2
](x)
dx.
Sustituyendo u
1
y u
2
en y
p
se obtiene una soluci on particular.
En forma general, si tenemos una ecuaci on diferencial de la forma
y
+ P
1
y
n1
+ + P
n
y = f(x).
Ahora encontramos la soluci on de la ecuaci on homogenea y
+ P
1
y
n1
+ + P
n
y = 0
que es
y
h
= c
1
y
1
+ c
2
y
2
+ + c
n
y
n
.
El metodo de variaci on de par ametros propone una solucion particular de la forma
y
p
= y
1
u
1
(x) + y
2
u
2
(x) + + y
n
u
n
(x).
Para hallar u
1
, u
2
, . . . , u
n
generalizamos el metodo propuesto anteriormente es decir:
u
k
=
_
f(x)W
k
(x)
W
k
[y
1
, . . . , y
2
k](x)
dx, k = 1, . . . , n
donde W
k
(x) = (1)
nk
W[y
1
, . . . , y
k1
, y
k+1
, . . . y
n
](x), k = 1, . . . , n.
Ejemplo 4.17. Determinar una solucion general de la ecuaci on:
a) y
+ y = tan
2
(x).
b) y
+ 4y
+ 4y = e
2x
ln(x).
Solucion: a) Primero resolvemos la ecuacion homogenea y
+y = 0 y obtenemos como
soluci on
y
h
= c
1
cos(x) + c
2
sin(x).
Ahora,
y
p
= u
1
(x) cos(x) + u
2
(x) sin(x)
de donde y
1
= cos(x) y y
2
= sin(x) y hallando el wronskiano tenemos.
W(y
1
, y
2
) =
cos(x) sin(x)
sin(x) cos(x)
= cos
2
(x) + sin
2
(x) = 1.
4.5. VARIACI
ON DE PAR
AMETROS 135
Por lo tanto,
u
1
=
_
tan
2
(x) sin(x)
1
dx, u
2
=
_
tan
2
(x) cos(x)
1
dx
u
1
=
(cos
2
(x) + 1)
cos(x)
, u
2
= ln | sec(x) + tan(x)| sin(x)
es decir
y
p
=
(cos
2
(x) + 1)
cos(x)
cos(x) + (ln | sec(x) + tan(x)| sin(x)) sin(x)
y
p
=sin(x)(ln | sec(x) + tan(x)|) 2
por lo tanto la solucion general de la ecuaci on es:
y = c
1
cos(x) + c
2
sin(x) + (ln | sec(x) + tan(x)|) sin(x) 2.
b) Resolvemos la ecuacion homogenea y
+ 4y
+ 4y = 0 y obtenemos como soluci on
y
h
= c
1
e
2x
+ c
2
xe
2x
.
Ahora
y
p
= u
1
(x)e
2x
+ u
2
(x)xe
2x
con y
1
= e
2x
y y
2
= xe
2x
, podemos hallar el wronskiano:
W(y
1
, y
2
) =
e
2x
xe
2x
2e
2x
e
2x
2xe
2x
= e
4x
2xe
4x
+ 2xe
4x
= e
4x
.
Por lo tanto,
u
1
=
_
e
2x
ln(x)xe
2x
e
4x
dx, u
2
=
_
e
2x
ln(x)e
2x
e
4x
dx
u
1
=
_
x ln(x)dx, u
2
=
_
ln(x)dx
u
1
=
2x
2
ln(x) + x
2
4
, u
2
= x ln |x| x
136CAP
ITULO4. ECUACIONES DIFERENCIALES LINEALES DE ORDENSUPERIOR
es decir:
y
p
=
2x
2
ln(x) + x
2
4
e
2x
+ (x ln |x| x)xe
2x
y
p
=
e
2x
x
2
(2 ln |x| 3)
4
por lo tanto la solucion general de la ecuaci on es:
y = c
1
e
2x
+ c
2
xe
2x
+
e
2x
x
2
(2 ln |x| 3)
4
.
4.6. Ecuaci on de Cauchy-Euler
Una ecuacion diferencial lineal de la forma:
a
n
(x)
d
n
y
dx
n
+ a
n1
(x)
d
n1
y
dx
n1
+ + a
1
(x)
dy
dx
+ a
0
(x)y = g(x)
con a
n
, a
n1
, , a
0
constantes es una ecuaci on de Cauchy-Euler. La caracterstica de
este tipo de ecuacion es que el grado de x
k
, k = 0, 1, , n coincide con el orden k de la
derivada
d
k
y
dx
k
.
Estaremos interesados en resolver ecuaciones de la forma:
a
n
(x)
d
n
y
dx
n
+ a
n1
(x)
d
n1
y
dx
n1
+ + a
1
(x)
dy
dx
+ a
0
(x)y = 0 con a
0
, a
1
, a
n
R. (4.17)
Suponemos que una soluci on es de la forma y = x
m
. El problema se reduce a encontrar los
valores del exponente m que hace que las funciones y = x
m
sean soluci on de la ecuaci on.
As,
y = x
m
= y
= mx
m1
, y
= m(m1)x
m2
,
sustituyendo en la ecuaci on:
a
n
x
n
x
mn
m(m1)(m2) [m(n 1)]+ a
1
xmx
m1
+ a
0
x
m
= 0
a
n
x
m
m(m1)(m2) [m(n 1)]+ a
1
mx
m
+ a
0
x
m
= 0
x
m
[a
n
m(m1)(m2) [m(n 1)]+ a
1
m + a
0
] = 0.
4.6. ECUACI
ON DE CAUCHY-EULER 137
Luego y = x
m
es una solucion de la ecuaci on diferencial siempre que m sea una solucion
de la ecuaci on (caracterstica):
De lo cual podemos tener varios casos:
Caso I. El polinomio caracterstico tiene n races reales simples y distintas: m
1
, m
2
, , m
n
.
Por lo tanto, tenemos n soluciones de la ecuaci on que ser an:
y
1
= x
m
1
, y
2
= x
m
2
, , y
n
= x
mn
.
Puede vericarse que el Wronskiano es no nulo para todo x R , por lo tanto por
la denicion (4.8) estas funciones forman un conjunto fundamental de soluciones y
la solucion general de la ecuaci on es:
y(x) = C
1
x
m
1
+ C
2
x
m
2
+ + C
n
x
mn
.
Caso II. Las races del polinomio son reales pero algunas con multiplicidad mayor que uno.
Supongamos que tenemos la ecuaci on ax
2
y
+bxy
+cy = 0, sustituyendo tenemos:
ax
2
m(m1)x
m2
+ bxmx
m1
+ cx
m
=0
am(m1)x
m
+ bmx
m
+ cx
m
=0
x
m
[am(m1) + bm + c] =0
am
2
m(b a) + c =0
dos races iguales entonces y
1
= x
m
1
es una soluci on, para encontrar la otra utili-
zamos el metodo de reducci on de orden, con la f ormula
y
2
(x) = y
1
(x)
_
e
p(x)dx
[y
1
(x)]
2
dx,
en este caso p(x) =
b
ax
y m
1
=
(ba)
2a
ya que (b a)
2
4ac = 0 sustituyendo en la
ecuaci on obtenemos:
y
2
(x) =x
m
1
_
e
b
ax
dx
_
x
(ba)
2a
_
2
dx
y
2
(x) =x
m
1
_
e
b
a
ln(x)
x
b
a
+1
dx
138CAP
ITULO4. ECUACIONES DIFERENCIALES LINEALES DE ORDENSUPERIOR
resolviendo la integral obtenemos que y
2
= ln(x)x
m
1
estas dos soluciones son lineal-
mente independientes y la soluci on general de la ecuacion es:
y(x) = C
1
x
m
1
+ C
2
x
m
1
ln(x),
y para la ecuacion (4.20) si la multiplicidad de la raz es n se extiende, obteniendose
n soluciones linealmente independientes la soluci on general es:
y(x) = C
1
x
m
1
+ C
2
x
m
1
ln(x) + C
3
x
m
1
[ln(x)]
2
+ C
n
[ln(x)]
n1
x
m
1
.
Caso III. El polinomio tiene un par de races complejas conjugadas :
m
1
=a + ib
m
2
=a ib.
Como y = x
m
es una soluci on de la ecuacion diferencial, y m
1
= a+ib, m
2
= aib
son soluciones de la ecuaci on caracterstica se tiene que , y
1
(x) = x
a+ib
, y
2
(x) =
x
aib
, son soluciones particulares de la ecuaci on diferencial.
Puede tomarse la expresi on de estas exponenciales seg un la f ormula de Euler:
x
a+ib
= x
a
x
ib
= x
a
e
ib ln(x)
= x
a
[cos(b ln(x)) + isen(b ln(x))].
De esta forma podemos escribir las soluciones de la siguiente manera:
C
1
x
a
[cos(b ln(x)) + isen(b ln(x))] + C
2
x
a
[cos(b ln(x)) + i sin(b ln(x))] =
= C
1
x
a
[cos(b ln(x)) + i sin(b ln(x))] + C
2
x
a
[cos(b ln(x)) i sin(b ln(x))]
= x
a
[(C
1
+ C
2
) cos(b ln(x)) + (iC
1
iC
2
) sin(b ln(x))]
= x
a
[K
1
cos(b ln(x)) + K
2
sin(b ln(x))]
Si la multiplicidad de la raz compleja es r la solucion general viene dada por:
y = x
a
[{K
1
cos(b ln(x)) + K
2
sin(b ln(x))} + ln(x){K
3
cos(b ln(x))+
K
4
sin(b ln(x))} + + (ln(x))
r1
{K
2r1
cos(b ln(x)) + K
2r
sin(b ln(x))}].
4.6. ECUACI
ON DE CAUCHY-EULER 139
Ejemplo 4.18. Determine la solucion general de la ecuaci on diferencial:
x
3
y
6y = 0.
Solucion: Si tratamos de hallar la soluci on de la forma y = x
m
, entonces esto nos conduce
a hallar las races de la ecuacion auxiliar
m(m1)(m2) 6 =0
m
3
3m
2
+ 2m6 =0.
Factorizando obtenemos (m 3)(m
2
+ 2) = 0. Por lo tanto las races de la ecuaci on
auxiliar son:
m = 3, m = i
2.
Por lo tanto, si en la parte imaginaria a = 0, b =
2, una solucion general de la ecuaci on
es
y = c
1
x
3
+ c
2
cos(
2 ln(x)) + c
3
sin(
2 ln(x)).
Ejemplo 4.19. Encontrar la solucion general de la ecuaci on
x
2
y
+ 3xy
+ y = x
1
.
Solucion. Se trata de una ecuaci on de Cauchy-Euler. Haciendo x = e
t
, suponiendo x > 0,
tenemos
t =ln(x)
dt
dx
=
1
x
dy
dx
=
dy
dt
dt
dx
=
dy
dt
1
x
d
2
y
dx
2
=
1
x
_
d
2
y
dt
2
dt
dx
_
1
x
2
_
dy
dt
_
=
1
x
2
_
d
2
y
dt
2
dy
dt
_
x
dy
dx
=x
dy
dt
(4.18)
x
2
d
2
y
dx
2
=
d
2
y
dt
2
dy
dt
. (4.19)
140CAP
ITULO4. ECUACIONES DIFERENCIALES LINEALES DE ORDENSUPERIOR
Sustituyendo (4.18) y (4.19) en la ecuacion x
2
y
+ 3xy
+ y = x
1
obtenemos:
d
2
y
dt
2
dy
dt
+ 3
dy
dt
+ y(t) = e
t
d
2
y
dt
2
+ 2
dy
dt
+ y(t) = e
t
,
la ultima ecuaci on es una lineal completa de segundo orden de coecientes constantes no
homogenea. Primero resolvemos la ecuaci on homogenea
y
+ 2y
+ y = 0
y obtenemos como soluci on
y
h
=c
1
e
t
+ c
2
te
t
y
p
=u
1
(t)e
t
+ u
2
(t)te
t
con y
1
= e
t
y y
2
= te
t
hallamos el wronskiano.
W(y
1
, y
2
) =
e
t
te
t
e
t
e
t
te
t
= e
2t
te
2t
+ te
2t
= e
2t
por lo tanto
u
1
=
_
e
t
te
t
e
2t
dt, u
2
=
_
e
t
e
t
e
2t
dt
u
1
=
_
t, u
2
=
_
dt
u
1
=
t
2
2
, u
2
= t
es decir:
y
p
=
t
2
2
e
t
+ t
2
e
t
y
p
=
t
2
e
t
2
.
As, la soluci on general de la ecuaci on es:
4.7. APLICACIONES A LA F
ISICA 141
y = c
1
e
t
+ c
2
te
t
+
t
2
e
t
2
y ahora sustituimos, x = e
t
y se obtiene la solucion general:
y = c
1
x
1
+ c
2
ln(x)x
1
+
ln
2
(x)x
1
2
.
4.7. Aplicaciones a la Fsica
Una de las aplicaciones de las ecuaciones diferenciales con coecientes constantes, es el
movimiento de una masa sujeta a un resorte, es un ejemplo de las vibraciones que ocurren
en sistemas mec anicos.
4.7.1. Movimiento Arm onico Simple
Una masa m sujeta a resorte exible, el cual esta suspendido de un soporte jo. (Figura
4.1)
Figura 4.1:
La ley de Hook dice que el resorte mismo ejerce una fuerza F de restitucion opuesta a
la direcci on del alargamiento que sucede con la masa m. Si x es el alargamiento total,
tenemos que F = kx, donde k es la constante de proporcionalidad que depende del
material que esta hecho el resorte (k es la rigidez y es positiva).
Usando la segunda ley de movimiento de Newton, fuerza igual a masa por aceleraci on,
la cual es una ecuaci on diferencial de segundo orden, pues la aceleracion es la segunda
derivada de la posici on x con respeto al tiempo, resulta que el desplazamiento x(t) del
resorte sigue la ecuaci on diferencial
d
2
x
dt
2
+
k
m
x = 0. (4.20)
142CAP
ITULO4. ECUACIONES DIFERENCIALES LINEALES DE ORDENSUPERIOR
Escribimos la ecuacion auxiliar asociada a (4.20) que es D
2
+
k
m
x = 0, que tiene las races
complejas conjugadas
_
k
m
i. Por lo tanto la solucion general de (4.20) es:
x(t) = c
1
cos
_
_
k
m
t
_
+ c
2
sin
_
_
k
m
t
_
. (4.21)
Tomamos A 0, haciendo c
1
= Asin() y c
2
= Acos(), sustituyendo en (4.21) obtene-
mos:
c
1
cos
_
_
k
m
t
_
+ c
2
sin
_
_
k
m
t
_
=Asin() cos
_
_
k
m
t
_
+ Acos()sen
_
_
k
m
t
_
=Asin
_
_
k
m
t +
_
.
Al hallar A y en terminos de c
1
y c
2
, tenemos A =
_
c
2
1
+ c
2
2
, tan() =
c
1
c
2
y w =
_
k
m
es decir nos queda x(t) = Asin( + wt). La constante A es la amplitud del movimiento
y es el angulo de fase. El movimiento es peri odico con periodo
2
w
y frecuencia natural
w
2
. El periodo se mide en unidades de tiempo, la frecuencia natural ciclos/segundo y la
frecuencia angular radianes/segundo.
La gura 4.2 muestra un movimiento arm onico simple de vibraciones libres no amorti-
guado.
Ejemplo 4.20. Una masa de 3 Kg esta unida a un resorte con rigidez k = 48
N
n
. La masa
se desplaza 1/2m a la izquierda del punto de equilibrio y recibe una velocidad de 2m/seg
hacia la derecha. La fuerza de amortiguamiento es despreciable. Determine la ecuacion
de movimiento de la masa junto con su amplitud, periodo y frecuencia. Cu anto tiempo
despues de su liberacion pasa la masa por su posicion de equilibrio?
Solucion: Tenemos un caso de vibraci on libre no amortiguada, la ecuaci on de movimiento
que usamos es (4.20). La frecuencia angular es:
w =
_
k
m
=
_
48
3
= 4
radianes
seg
,
sustituyendo en (4.21) obtenemos
x(t) = c
1
cos(4t) + c
2
sin(4t).
4.7. APLICACIONES A LA F
ISICA 143
Figura 4.2:
Ahora usamos las condiciones iniciales x(0) = 1/2m, x
(0) = 2m/seg para hallar c
1
y
c
2
, reemplazamos las condiciones iniciales en la ultima ecuaci on y obtenemos:
1
2
=c
1
2 =4c
2
de modo que
1
2
= c
1
y c
2
=
1
2
. Por lo tanto la ecuacion de movimiento de la masa es:
x(t) =
1
2
cos(4t) +
1
2
sin(4t).
Como A =
_
c
2
1
+ c
2
2
, tenemos que A =
_
_
1
2
_
2
+
_
1
2
_
2
, luego la amplitud es A =
2
2
m.
Para hallar el angulo fase tomamos tan() =
c
1
c
2
, reemplazando tenemos tan() =
1/2
1/2
=
1, de donde = arctan(1) =
4
radianes que es el angulo fase. Periodo
2
4
=
2
seg,
la frecuencia es
w
2
=
4
2
=
2
ciclos
seg
.
Por ultimo, para determinar el momento en que la masa pasa por su posici on de equilibrio,
144CAP
ITULO4. ECUACIONES DIFERENCIALES LINEALES DE ORDENSUPERIOR
hacemos x = 0 reemplazando en la ecuaci on tenemos:
x(t) =
1
2
cos(4t) +
1
2
sin(4t) =
2
2
sin(4t + )
0 =
2
2
sin(4t + ).
Ahora resolvemos la ecuaci on la cual se satisface si 4t + = n o t =
n+/4
4
, donde
n es un entero. Si tomamos que es la primera vez que la masa pasa por la posicion de
equilibrio obtenemos
t =
1 + /4
4
=
5
16
seg.
4.7.2. Movimiento Amortiguado
El desplazamiento de una masa sujeta a un resorte como se presenta en la parte inicial
del movimiento arm onico simple se amortigua por fuerzas externas como por fuerzas
internas. Por lo menos habra la fuerza de amortiguacion debida al medio que lo rodea.
Se ha determinado que las fuerzas de amortiguamiento son m ultiplos de
dx
dt
, es decir esta
fuerza es proporcional a la velocidad instant anea de la masa. Llamamos b a la constante
de proporcionalidad. La segunda ley de Newton dice que:
m
d
2
x
dt
2
+ b
dx
dt
+ kx = 0.
Dividiendo por m, 2 =
b
m
y haciendo w
2
=
k
m
tenemos que
d
2
x
dt
2
+ 2
dx
dt
+ w
2
x = 0,
tiene como races de la ecuacion auxiliar r
1,2
=
2
w
2
, estas muestran tres casos
posibles, en las que las races son diferentes, iguales y complejas.
Caso I:
2
w
2
> 0. Se tiene races reales distintas con w = y > w. Como vemos
el coeciente de amortiguamiento es grande comparado con la constante k del resorte, es
decir el sistema est a sobreamortiguado. La soluci on es:
x(t) =c
1
e
r
1
t
+ c
2
e
r
2
t
=c
1
e
+
2
w
2
t
+ c
2
e
2
w
2
t
.
4.7. APLICACIONES A LA F
ISICA 145
Caso II:
2
w
2
= 0. Las dos races r
1
y r
2
son iguales. Esto quiere decir que la
fuerza de amortiguamiento es igual a la causada por la elasticidad, y decimos que el
movimiento es crticamente amortiguado ya que una peque na disminucion de la fuerza
de amortiguamiento provocara un movimiento oscilatorio. La solucion el sistema es:
x(t) = c
1
e
t
+ c
2
te
t
.
Caso III:
2
w
2
< 0. En este caso decimos que el movimiento est a subamortiguado
porque es peque na comparada con k. El movimiento es oscilatorio, aunque con amplitud
cada vez menor, ya que x(t) 0 cuando t . Esto lo podemos ver de la ecuaci on
resultante del movimiento:
x(t) = e
t
_
c
1
cos
_
2
w
2
t
_
+ c
2
sin
_
2
w
2
t
_
_
.
Ejemplo 4.21. El movimiento de un sistema masa-resorte con amortiguamiento esta des-
crito por
y
(t) + by
(t) + 64y(t) = 0, y(0) = 1, y
(0) = 0.
Determine la ecuacion de movimiento y bosqueje la graca para 0, 10, 16 y 20.
Solucion. La ecuacion auxiliar esta dada por:
m
2
+ bm + 64 = 0
m =
b
b
2
256
2
=
b
2
b
2
256
2
.
Para b tomamos los siguientes casos:
(a.) b = 0. En este caso las raices de la ecuacion son complejas (puras) es decir:
m
1
=
16i
2
= 8i
m
2
= 8i
La ecuacion de movimiento (Subamortiguado) esta dada por
y(t) = c
1
cos(8t) + c
2
sin(8t).
146CAP
ITULO4. ECUACIONES DIFERENCIALES LINEALES DE ORDENSUPERIOR
Ahora usamos las condiciones iniciales y(0) = 1/2, y
(0) = 2 para hallar c
1
y c
2
,
reemplazamos las condiciones iniciales en la ultima ecuacion y obtenemos:
c
1
= 1
c
2
= 0.
Por lo tanto, la ecuaci on de movimiento de la masa es:
y(t) = cos(8t) = cos(8t + )
de donde A =
_
c
2
1
+ c
2
= 1 es el factor de amortiguamiento.
Para hallar el angulo , hacemos tan() =
c
1
c
2
el cual es indeterminado, ademas
es un angulo en el primer cuadrante, as =
2
.
Ejercicio 4.22. 1. En los problemas a) a d), cada familia de funciones es la solucion
general de la ecuaci on diferencial en el intervalo indicado. Determine un miembro
de la familia que sea soluci on del problema del valor inicial.
a) y = c
1
e
x
+ c
2
e
x
; (, ); y
y = 0, y(0) = 0, y
(0) = 1.
b) y = c
1
e
4x
+ c
2
e
x
; (, ); y
3y
4y = 0, y(0) = 1, y
(0) = 2.
c) y = c
1
x + c
2
x ln(x); (0, ); x
2
y
xy
+ y = 0, y(1) = 3, y
(1) = 1.
d) y = c
1
+ c
2
cos(x) + c
3
sin(x); (, ); y
+ y
= 0, y() = 0, y
() =
2, y
() = 1.
2. Si y = c
1
+ c
2
x
2
es una familia biparametrica de soluciones de xy
= 0 en el
intervalo (, ), demuestre que las constantes c
1
y c
2
no se pueden determinar de
tal manera que un miembro de la familia satisfaga las condiciones y(0) = 0, y
(0) =
1. Explique por que esto contradice al Teorema 3.1.
3. Determine a dos miembros de la familia de soluciones en el ejercicio anterior que
satisfagan las condiciones iniciales y(0) = 0, y
(0) = 0.
4. En los ejercicios a) y b) determine un intervalo con centro x = 0, para el cual el
problema de valor inicial tenga una solucion unica.
a) (x 2)y
+ 3y = x, y(0) = 0, y
(0) = 1.
b) y
+ (tan x)y = e
x
, y(0) = 1, y
(0) = 0.
4.7. APLICACIONES A LA F
ISICA 147
5. Use el teorema 3.1 para analizar la existencia y unicidad de una soluci on de la
ecuaci on diferencial que satisfaga las condiciones iniciales y(1) = y
0
, y
(1) = y
1
,
donde y
0
y y
1
son constantes reales.
a) (1 + x
2
)y
+ xy
y = tan(x).
b) e
x
y
x3
+ y = ln(x).
6. Determine si de aplica el teorema 3.1. En caso armativo, analice las conclusiones
que pueden extraerse. En caso negativo, explique por que.
a) y
+ yy
= x
2
1; y(0) = 1, y
(0) = 1.
b) (1 t)x
+ tx
2 = sent; x(0) = 1, x
(0) = 1.
7. Sabiendo que y = e
2x
es una solucion de (2x+1)y
4(x+1)y
+4y = 0 , encontrar
la otra soluci on linealmente independiente. Escribir la soluci on general.
8. Determine si las funciones y
1
y y
2
son linealmente independientes en el intervalo
(0, 1). Calcule ademas el wronskiano W[y
1
, y
2
](x):
a) y
1
(x) = e
x
cos(2x), y
2
(x) = e
x
sin(2x).
b) y
1
(x) = xe
2x
, y
2
(x) = e
2x
c) y
1
(x) = x
2
cos(ln x), , y
2
(x) = x
2
sin(ln(x))
d) y
1
(x) = 0, y
2
(x) = e
x
.
9. (a.) Verique si las funciones y
1
y y
2
son linealmente independientes de la ecuaci on
diferencial dada, (b.) determine una soluci on general de la ecuacion dada y (c.)
determine la soluci on que satisface las condiciones iniciales.
a) x
2
y
2y = 0; y
1
(x) = x
2
, y
2
(x) = x
1
; y(1) = 2; y
(1) = 7.
b) y
5y
+ 6y = 0; y
1
(x) = e
2x
, y
2
(x) = e
3x
; y(0) = 1; y
(0) = 4.
c) ty
(t+2)y
+2y = 0; y
1
(x) = e
t
, y
2
(x) = t
2
+2t+2; y(1) = 0; y
(1) =
1.
10. Sean y
1
(x) = x
3
y y
2
(x) = |x
3
|. Son y
1
y y
2
linealmente independientes en los
siguientes intervalos?
a) [0, ).
b) (, 0).
c) (, ).
148CAP
ITULO4. ECUACIONES DIFERENCIALES LINEALES DE ORDENSUPERIOR
d) Calcule el wronskiano W[y
1
, y
2
](x) en el intervalo (, ).
11. Encontrar las regiones donde el teorema de existencia y unicidad garantiza la uni-
cidad para problemas de Cauchy:
y
+ 3xy
+ x
3
y = e
x
; y(0) = 0, y
(0) = 0.
12. Determine un intervalo con centro en x = 0, para el cual el problema de valor inicial
tenga una solucion unica.
a) (x 2)y
+ 3y = x; y(0) = 0; y
(0) = 1.
b) y
+ (tan x)y = e
x
; y(0) = 1; y
(0) = 0.
13. Se da una ecuacion diferencial y una soluci on no trivial f. Determine una segunda
soluci on linealmente independiente.
a) x
2
y
xy
+ 2y = 0; f(x) = x sin(ln(x)).
b) y
25y = 0; f(x) = e
5x
.
c) x
2
y
+ 2xy
6y = 0; f(x) = x
2
.
d) xy
+ (1 2x)y
+ (x 1)y = 0; x > 0; f(x) = e
x
.
e) (1 2x x
2
)y
+ 2(1 + x)y
2y = 0; f(x) = x + 1.
14. En fsica matem atica, muchos problemas con simetra esferica implican el estudio
de la ecuaci on de Legendre,
(1 x
2
)y
2xy
+ ( + 1)y = 0; 1 < x < 1,
donde es un par ametro: Use la formula para reduccion de orden para obtener
una representaci on integral de una segunda soluci on linelamente independiente de
la ecuaci on de Legendre para el valor dado de y la soluci on correspondiente de
f(x).
a) = 1, f(x) = x.
b) = 2, f(x) = 3x
2
1.
c) = 3, f(x) = 5x
3
3x.
15. La ecuacion xy
+ (1 x)y
+ xy
y = 0, tiene a f(x) = x como soluci on. Use
la sustituci on y(x) = v(x)f(x) para reducir esta ecuacion de tercer orden a una
ecuaci on lineal homogenea de segundo orden en la variable w = v
.
4.7. APLICACIONES A LA F
ISICA 149
16. Forma normal. Muestre que la sustitucion y(x) = u(x)v(x), donde
v(x) = exp
_
1
2
_
p(x)dx
_
,
transforma la ecuacion diferencial
y
+ p(x)y
+ q(x)y = 0
en una ecuacion de la forma
u
+ f(x)u = 0.
La ultima ecuacion se llama forma normal de una ecuacion lineal de segundo orden
homogenea.
17. En mecanica cu antica, el estudio de la ecuaci on de Sch odinger para el atomo de
hidr ogeno conduce a considerar la ecuaci on de Laguerre: xy
+ (1 x)y
+y = 0,
donde es un par ametro. Use la f ormula para reduccion de orden para obtener
una representaci on integral de una segunda soluci on linealmente independiente de
la ecuacion de Laguerre para = 2, f(x) = x
2
4x + 2.
18. Resolver las siguientes ecuaciones diferenciales homogeneas:
a) 3y
+ 11y
7y = 0.
b) y
+ y
6y
+ y = 0.
c) y
+ y
+ 3y
5y = 0.
d) 4y
+ 4y
+ 6y = 0.
e) 4y
4y
+ 26y = 0.
f ) y
+ 2y
+ 2y = 0; y(0) = 2; y
(0) = 1.
g) y
3y
+ 3y
y = 0.
h) y
+ y
+ 3y = 0.
i ) y
+ 2y
5y
6y = 0; y(0) = 1, y
(0) = 0; y
(0) = 0.
j ) y
4y
+ 7y
6y = 0; y(0) = y
(0) = 0; y
(0) = 1.
k) y
+ 16y = 0; y(0) = 2; y
(0) = 2.
l ) y
(4)
+ y
+ 3y
= 0.
m) y
(4)
2y
+ y = 0.
n) y
+ y
+ 2y = 0, y(0) = y
(0) = 0.
n) y
2y
+ y = 0, y(0) = 1, y
(0) = 2.
150CAP
ITULO4. ECUACIONES DIFERENCIALES LINEALES DE ORDENSUPERIOR
o) y
2y
+ 2y = 0, y(0) = 1, y
() = 1.
19. Examine la ecuaci on de segundo orden con coecientes constantes y
+by
+cy = 0.
a) Si y(x) es una soluci on de la ecuacion describa que condiciones deben satisfacer
b y c para que lmx y(x) = 0.
20. Para ver el efecto de cambiar el par ametro b en el problema con valores iniciales
y
+ by
+ 4y = 0; y(0) = 1, y
(0) = 0,
resuelva el problema para b = 5,4 y 2 y bosqueje las soluciones.
21. En los ejercicios a) y b) dise ne una modicaci on del metodo analizado en la seccion
Ecuaciones de Cauchy-Eulerpara determinar una solucion general de la ecuacion
dada.
a) (x 2)
2
y
(x) 7(x 2)y
(x) + 7y(x) = 0, x > 2.
b) (x + 1)
2
y
(x) + 10(x + 1)y
(x) + 14y(x) = 0, x > 1.
22. Determine una soluci on general de la ecuaci on diferencial dada
a) x
2
y
+ 7xy
7y = 0.
b) y
1
x
y
+
5
x
2
y = 0.
c) x
2
y
3xy
+ 6y = 0.
d) x
2
y
3xy
2y = 0.
e) x
2
y
+ 5xy
+ 4y = 0.
f ) x
2
y
+ 3xy
+ 5y = 0.
g) x
2
y
+ 9xy
+ 17y = 0.
h) x
3
y
+ xy
y = 0.
i ) x
2
y
5xy
+ 8y = 0; y(2) = 32; y
(2) = 0.
23. Dado que y
1
(x) = cos(x) es una soluci on de
y
+ y = sin(x),
y y
2
(x) = e
2x
/3 es una soluci on de
y
+ y = e
2x
,
determine soluciones de las siguientes ecuaciones diferenciales:
4.7. APLICACIONES A LA F
ISICA 151
a) y
+ y = 5 sin(x).
b) y
+ y = sin(x) 3e
2x
.
c) y
+ y = 4 sin(x) + 18e
2x
.
24. dado que 1 + x, 1 + 2x y 1 + 3x
2
son soluciones de la ecuaci on diferencial y
+
p(x)y
+q(x)y = g(x), determine la soluci on de esta ecuacion que satisface y(1) = 1,
y
(1) = 0.
25. El procedimiento para reduccion de orden para ecuaciones homogeneas se puede
extender a la ecuaci on no homogenea
y
+ p(x)y
+ q(x)y = g(x).
a) Muestre que la sustitucion y = v(x)f(x), donde f(x) es una soluci on no trivial
conocida de la ecuaci on homogenea correspondiente, reduce la ecuaci on no
homogenea a la ecuacion lineal de primer orden
fw
+ (2f
+ pf)w = g,
donde w = v
.
b) Use el procedimiento de la parte (a) para hallar una soluci on general de
y
+ x
1
y
4x
2
y = 1 x
3
, x > 0,
dado que f(x) = x
2
es una soluci on de la ecuaci on homogenea correspondiente.
26. Determine una soluci on general de la ecuacion diferencial dada, por el metodo de
coecientes indeterminados.
a) y
2y = cos(x) sin(2x); y(0) =
7
20
; y
(0) =
1
5
.
b) y
4y
+ 4y = x
2
e
2x
e
2x
.
c) y
+ 2y
+ y = x
2
+ 1 e
x
; y(0) = 0; y
(0) = 2.
d) y
+ 6y
+ 13y = e
3x
cos(2x).
e) y
+ 8y
= 6x
2
+ 9x + 2
f ) y
+ y
+
1
4
y = e
x
(sin(3x) cos(3x)).
g) y
+ 5y
6y = 10e
2x
, y(0) = y
(0) = 1.
h) y
2y
4y
+ 8y = 6xe
2x
.
i ) y
(4)
y
= 4x + 2xe
x
.
152CAP
ITULO4. ECUACIONES DIFERENCIALES LINEALES DE ORDENSUPERIOR
j ) y
+ 8y = 2x 5 + 8e
2x
, y(0) = 5, y
(0) = 3, y
(0) = 4.
27. Metodo del anulador. El metodo del anulador permite justicar el metodo de
coecientes indeterminados. Sabemos que una ecuaci on diferencial se puede escribir
de la forma a
n
D
n
y +a
n1
D
n1
y + +a
1
Dy +a
0
y = g(x) en donde D
k
=
d
k
y
dx
k
, k =
1, 2, , n. Cuando nos convenga, representaremos tambien la ecuaci on de la forma
L(x) = g(x), donde L representa el operador diferencial lineal de orden n: L =
a
n
D
n
+ a
n1
D
n1
+ + a
1
D + a
0
. Se dice que L es un anulador si L(f(x)) = 0.
Ejemplo D
n
anula a cada una de las funciones 1, x, x
2
, , x
n1
, (D)
n
anula las
funciones e
x
, xe
x
, x
2
e
x
, , x
n1
e
x
, [D
2
2D+(
2
+
2
)]
n
anula las funciones
e
x
cos(x), xe
x
cos(x), x
2
e
x
cos(x), , x
n1
e
x
cos(x), e
x
sin(x),
xe
x
sin(x), x
2
e
x
sin(x), , x
n1
e
x
sin(x).
Para ilustrar considere la ecuaci on:
(D 1)(D + 1)[y] = y
y = e
3x
(4.22)
a) Muestre que al aplicar D 3 a ambos lados de la ecuaci on (4.22) tenemos
(D 3)(D 1)(D + 1)[y] = y
y = 0 (4.23)
(como (D 3)[e
3x
] = 0, decimos que D 3 anula a e
3x
).
b) Si y
p
satisface la ecuaci on diferencial (4.22) tambien satisface la ecuaci on
(4.23). Verique que
c
1
e
3x
+ c
2
e
x
+ c
3
e
x
(4.24)
es una soluci on general de (4.23) y concluya que existe una soluci on particular
de (4.22) de La forma (4.24).
c) Use el hecho de que c
2
e
x
+ c
3
e
x
es una soluci on de la ecuacion homogenea
(D1)(D+1)[y] = 0, y concluya que existe una solucion particular de (4.22)
de La forma y
p
= c
1
e
3x
.
d) Use el procedimiento anterior para mostrar que existe una solucion particular
(D 1)(D + 1)[y] = e
x
, de la forma y
p
= cxe
3x
.
28. Determine una soluci on general de la ecuaci on diferencial dada
a) x
2
y
+ 73xy
+ y = x
1
.
b)
1
2
y
+ 2y = tan(2x)
1
2
e
x
.
4.7. APLICACIONES A LA F
ISICA 153
c) (1+x
2
)y
+xy
y +1 = 0 sabiendo que y
1
(x) = x es una soluci on particular.
d) x
3
y
4x
2
y
+ 8xy
+8y = 4 ln(x).
29. La ecuaci on de Bessel de orden un medio,
x
2
y
+ xy
+ (x
2
1
4
)y = x
5
2
, x > 0
tiene dos soluciones linealmente independientes, y
1
(x) = x
1
2
cos(x), y
2
(x) =
x
1
2
sin(x).
Determine una solucion general de la ecuaci on no homogenea.
30. Use el metodo de variaci on de par ametros para mostrar que
y(x) = c
1
cos(x) + c
2
sin(x) +
_
b
a
f(s) sin(x s)ds
es una soluci on general de la ecuaci on diferencial y
+y = f(x), donde f(x) es una
funci on continua en (, ).
(Sugerencia: Use la identidad trigonometrica sin(xs) = sin(x) cos(s)sin(s) cos(x)
).
31. Determinar a para que y(x) = ax
3
sea solucion de la ecuaci on xy
= 3x
2
y
usar el resultado para escribir una soluci on general.
32. Resuelva cada una de las siguientes ecuaciones por variaci on de par ametros.
a) y
+ y = tan(x).
b) y
y = cosh(x).
c) y
4y =
e
2x
x
.
d) y
+ 3y
+ 2y = sin(e
x
).
e) y
+ y
= tan(x).
f ) x
2
y
2xy
+ 2y = x
4
e
x
.
154CAP
ITULO4. ECUACIONES DIFERENCIALES LINEALES DE ORDENSUPERIOR
Captulo 5
Introducci on a los sistemas de
ecuaciones diferenciales
En la etapa de la modelaci on matematica de resoluci on de una ecuaci on diferencial or-
dinaria o sistema de ecuaciones diferenciales ordinarias no siempre es posible lograr una
soluci on en forma cerrada, de manera que se hace necesario disponer de otros metodos
para estudiar la solubilidad y caracterizaci on matematica de la ecuacion o sistema de
ecuaciones diferenciales. En algunas ecuaciones se disponen de metodos y del analisis
numerico para encontrar una solucion aproximada. Otro metodo ampliamente utiliza-
do en investigaciones y aplicaciones es el metodo cualitativo mediante el cual se busca
establecer matem aticamente las caractersticas mas signicativas de la solucion. Con fre-
cuencia hay ecuaciones diferenciales que no podemos resolver pero podemos analizar su
comportamiento cualitativo.
5.1. Plano Fase
Se estudiar a el comportamiento de las soluciones de sistemas aut onomos de ecuaciones
diferenciales ordinarias de la forma:
_
dy
dx
= f(x, y)
dy
dx
= g(x, y).
(5.1)
El sistema es aut onomo si las funciones f(x, y), g(x, y) no dependen de t.
Supongamos que f y g son funciones continuas en una regon , del plano euclideano
R
2
, ser a llamada plano fase.
155
156CAP
ITULO5. INTRODUCCI
ONALOS SISTEMAS DE ECUACIONES DIFERENCIALES
De acuerdo a los teoremas de existencia y unicidad, el problema de valor inicial:
_
_
dy
dx
= f(x, y)
dy
dx
= g(x, y)
x(t
0
) = x
0
, y(t
0
) = y
0
(5.2)
donde t
0
R y (x
0
, y
0
) , tiene una unica soluci on x = x(t), y = y(t), denida en
cierto intervalo real (a, b) que contiene el punto t
0
.
Las ecuaciones x = x(t), y = y(t), describen una curva soluci on parametrizada (x(t), y(t))
en el plano fase, llamada trayectoria. Para cada punto en el plano fase existe una y
s olo una trayectoria que contiene al punto.
Un punto (x
0
, y
0
) del sistema (5,1) es crtico cuando
f(x
0
, y
0
) = g(x
0
, y
0
) = 0. (5.3)
Si (x
0
, y
0
) es un punto crtico del sistema (5.1), entonces las funciones constantes satis-
facen la ecuaci on x = x(t), y = y(t). Tal soluci on constante se denomina una solucion
de equilibrio del sistema. Observe que la trayectoria de una soluci on del equilibrio consta
un unico punto (x
0
, y
0
).
Si C =
_
x(t), y(t)
_
es una trayectoria de (5.1), decimos que la curva C tiende al punto
de equilibrio (x
0
, y
0
), cuando t (o t ), si
lm
t
x(t) = x
0
, lm
t
y(t) = y
0
cuando existen los lmites decimos que (x
0
, y
0
) es un punto crtico de (5.1) adem as, si
lm
t
y(t) y
0
x(t) x
0
existe o es igual a decimos que C entra al punto crtico (x
0
, y
0
) cuando t
o t . Esto signica que la recta que une (x
0
, y
0
) con el punto p(x, y) tienen una
direcci on determinada cuando t o t .
Podemos aplicar la regla de la cadena y tenemos
dy
dx
=
dy
dt
dx
dt
5.2. TIPOS DE PUNTOS CR
ITICOS 157
as consideramos la ecuacion diferencial de primer orden
dy
dx
=
f(x, y)
g(x, y)
. (5.4)
La pendiente dy/dx de una trayectoria en el plano fase est a dada por el lado derecho
de (5.4).As, al resolver la ecuaci on (5.4) estamos localizando las trayectorias del sistema
(5.1) en el plano fase. Las curvas soluci on de (5.4), que en este contexto se conocen como
curvas integrales, contienen a las trayectorias.
Como (5.4) es la ecuaci on del plano fase construimos un campo de pendientes, a este
le agregamos puntas de echa a los segmentos de recta, indicando la direccion de ujo
de soluciones al crecer t. Todos los segmentos del campo de direcciones trazados en
una regi on donde f(x, y) es positiva deben aumentar hacia la derecha (y por su puesto,
apuntar hacia la izquierda cuando f(x, y) es negativa). Si f(x, y) se anula, podemos usar
g(x, y) para decir si el ujo es hacia arriba (y(t) crece) o hacia abajo ( y(t) disminuye).
El retrato de fase es un bosquejo del plano fase y unas pocas trayectorias tpicas, junto
con sus puntos crticos.
5.2. Tipos de Puntos Crticos
Denici on 5.1 (Estabilidad). Intuitivamente un punto crtico del sistema (5.1) se
llama estable si todas las curvas solucion con valor inicial sucientemente proximo del
punto crtico permanecen cerca de el. En caso contrario, es decir, cuando existe por lo
menos una curva que iniciando cerca del punto de equilibrio se separe de el, se llama
punto crtico.
Formalmente un punto crtico del sistema (5.1) es estable si para todo > 0, existe un
> 0, tal que para todo punto (x, y) , si |x
0
a| < , |y
0
b| < entonces la soluci on
_
x(t), y(t)
_
de (5.2) satisface |x(t) a| < , |y(t) b| < .
Denici on 5.2. (Estabilidad Asint otica:) Un punto crtico del sistema (5.1) se llama
asint oticamente estable si es un punto crtico estable de (5.1) y para alg un > 0.
si |x
0
a| < , |y
0
b| < entonces x(t) a, y(t) b, cuando t
En las siguientes deniciones, sin perdida de generalidad, se asumir a que (0, 0) es un
punto crtico del sistema autonomo (5.1).
158CAP
ITULO5. INTRODUCCI
ONALOS SISTEMAS DE ECUACIONES DIFERENCIALES
Figura 5.1: Nodo Impropio Inestable, Punto Silla Inestable
Denici on 5.3. Nodos Propios. El retrato fase esta formado por rayos de recta
(semirrectas) que entran o salen del punto crtico. Estos puntos tambien son co-
nocidos como nodos estrella, por el aspecto de su retrato de fase. Cuando todas
las trayectorias entran al punto crtico se dice que este punto crtico es un sumide-
ro asint oticamente estable y cuando salen del se llama una fuente asintoticamente
inestable.
Nodos Impropios: Corresponden a puntos crticos cuyas trayectorias entran cuan-
do t o t . En el retrato de fase de este tipo de nodo existen cuatro
trayectorias en forma de semirrectas con extremos en el origen. Las dem as tra-
yectorias tienen el aspecto de ramas de parabola y al tender hacia el origen sus
pendientes tienden a la pendiente de una de las semirrectas.
Punto Silla: Es un punto con dos trayectorias que se aproximan a el, pero el resto
de trayectorias son no acotadas cuando t . Es un punto donde dos semirectas
entran con extremos en el origen cuando t y hay otras dos semirrectas que
salen del punto cuando t . Entre estas cuatro semirrectas hay cuatro regio-
nes, las cuales contienen una familia de trayectorias en forma de hiperbolas; estas
trayectorias no tienden hacia el punto cuando t , sino que son asintoticas a
alguna de las semirectas cuando t .
Centros: Es un punto crtico que est a rodeado por una familia de trayectorias
cerradas. Ninguna trayectoria tiende a el cuando t .
5.2. TIPOS DE PUNTOS CR
ITICOS 159
Figura 5.2: Centro Estable, Punto espiral asintoticamente estable
Focos: En el retrato fase se muestra que hacia el punto crtico tienden (o salen)
las trayectorias de una familia que gira en forma de espiral un n umero innito de
veces cuando t ). Notese que aunque las trayectorias tienden al origen, no
entran a el punto en una direccion determinada, es decir
lm
t
dy
dx
no existe.
Ejemplo 5.4. Bosquejar el campo de direcciones en el campo fase para los sistemas
(a.)
_
_
dx
dt
= 8y
dx
dt
= 18x
.
(b.)
_
_
dx
dt
= 2y
dx
dt
= 2x
.
(c.)
_
_
dx
dt
= 2x + y
dx
dt
= 5x 4y
.
160CAP
ITULO5. INTRODUCCI
ONALOS SISTEMAS DE ECUACIONES DIFERENCIALES
(d.))
_
_
dx
dt
= 5x 3y 2
dx
dt
= 4x 3y 1
.
E identicar sus puntos crticos.
Solucion: (a.) Los puntos crticos son 8y = 0, 18x = 0 es decir x = 0, y = 0 por lo
tanto (0, 0) es el punto crtico. El campo de direcciones para la ecuaci on
dy
dx
=
18x
8y
aparece en la Figura 5.3. Como f(x, y) = 8y, las trayectorias del semiplano supe-
rior (y > 0) uyen hacia la izquierda y viceversa. El punto crtico es asintoticamente
estable. Las trayectorias estan en crculos concentricos con centro (0, 0).
Al resolver separando variables obtenemos 9x
2
+ 4y
2
= c lo cual indica que sus
trayectorias son elipses que encierran el punto crtico.
Figura 5.3:
5.2. TIPOS DE PUNTOS CR
ITICOS 161
(b.) Los puntos crticos son 2y = 0, 2x = 0 es decir x = 0, y = 0, por lo tanto es el
punto crtico (0, 0). El campo de direcciones para la ecuacion
dy
dx
=
2x
2y
=
x
y
aparece en la Figura 5.4. Como f(x, y) = 2y, las trayectorias del semiplano superior
(y > 0) uyen hacia la derecha y viceversa. Al resolver separando variables obtene-
mos y
2
x
2
= k lo cual indica que sus trayectorias son hiperbolas, que encierran
el punto critico. El punto crtico es silla inestable.
Figura 5.4:
(c.) Los puntos crticos se hallan solucionando el sistema.
_
2x + y = 0
5x 4y = 0
de donde x = 0, y = 0, son el conjunto de puntos crticos, por lo tanto (0, 0) es el
punto crtico. El campo de direcciones para la ecuaci on
dy
dx
=
5x 4y
2x + y
162CAP
ITULO5. INTRODUCCI
ONALOS SISTEMAS DE ECUACIONES DIFERENCIALES
aparece en la Figura 5.5. Observe que las soluciones uyen hacia la derecha para
Como 5x4y > 0, es decir para todos los puntos debajo de la recta 5x4y = 0.
El punto critico espiral inestable.
Figura 5.5:
(d.) Los puntos crticos se hallan solucionando el sistema.
_
5x 3y 2 = 0
4x 3y 1 = 0
de donde x = 1, y = 1, son el conjunto de puntos crticos, por lo tanto (1, 1) es el
punto crtico. El campo de direcciones para la ecuaci on
dy
dx
=
4x 3y 1
5x 3y 2
aparece en la Figura 5.6 Observe que las soluciones uyen hacia la derecha para
Como 4x3y1 > 0, es decir para todos los puntos debajo de la recta 4x3y1 =
0. El punto crtico es silla inestable.
Adem as se dibujaron algunas trayectorias solucion del sistema de ecuaciones dife-
renciables.
5.2. TIPOS DE PUNTOS CR
ITICOS 163
Figura 5.6:
5.2.1. Notaci on matricial de los sistemas lineales
Teorema 5.5. Existencia y unicidad para sistemas lineales.
Sea un sistema de n ecuaciones diferenciales lineales de primer orden
x
1
=a
11
(t)x
1
+ a
12
(t)x
2
+ + a
1n
(t)x
n
+ g
1
(t)
x
2
=a
21
(t)x
1
+ a
22
(t)x
2
+ + a
2n
(t)x
n
+ g
2
(t)
.
.
. (5.5)
x
n
=a
n1
(t)x
1
+ a
n2
(t)x
2
+ + a
nn
(t)x
n
+ g
n
(t)
Con condiciones iniciales
x
1
(x
0
) = y
1
, x
2
(x
0
) = y
2
, . . . , x
n
(x
0
) = y
n
Si las funciones a
11
, a
12
, . . . , a
nn
y g
1
, g
2
, . . . , g
n
son continuas en el intervalo abierto I
que contiene al punto x
0
, entonces el sistema en (5.5) tiene una solucion unica en todo
el intervalo I que satisface las n condiciones iniciales
164CAP
ITULO5. INTRODUCCI
ONALOS SISTEMAS DE ECUACIONES DIFERENCIALES
Utilizando notaci on matricial en el sistema (5.5) se puede expresar como:
X
= A(t)X + g(t)
Donde
X =
_
_
x
1
x
2
.
.
.
x
n
_
_
, X
=
_
_
x
1
x
2
.
.
.
x
n
_
_
A(t) =
_
_
a
11
(t) a
12
(t) . . . a
1n
(t)
a
21
(t) a
22
(t) . . . a
2n
(t)
.
.
.
.
.
.
.
.
.
.
.
.
a
n1
(t) a
n2
(t) . . . a
nn
(t)
_
_
, g =
_
_
g
1
g
2
.
.
.
g
n
_
_
Una soluci on de la ecuaci on (5.5) en el intervalo abierto I es una funci on vectorial co-
lumna X(t) = [x
i
(t)] tal que las funciones componentes satisfacen el sistema en (5.5)
identicamente en I. Si todas las funciones a
ij
(t) y g
i
(t) son continuas en I, entonces el
teorema 5.8 garantiza la existencia de una solucion unica en que satisface las condiciones
iniciales x(x
0
) = y.
5.2.2. Soluci on de sistemas de ecuaciones diferenciales lineales
Para resolver la ecuacin (5.5), primero se resuelve la ecuaci on homogenea :
X
= A(t)X (5.6)
Una vez resuelta, con soluci on
h
, esta soluci on permite encontrar una soluci on particular
del sistema original
p
y as obtener la soluci on general de la ecuacion (5.5).
=
h
+
p
Teorema 5.6. Las soluciones x(t) de (5.6) tienen las siguientes propiedades:
a) x(t) = 0 es una solucion de (5.6) (solucion trivial).
b) Si x(t
0
) = 0 para alg un t
0
I, entonces x(t) 0 (es la solucion trivial).
5.2. TIPOS DE PUNTOS CR
ITICOS 165
c) Si x
1
, x
2
, . . . , x
m
son m soluciones de la ecuacion lineal homogenea (5.5) en el
intervalo abierto I c
1
, c
2
, . . . , c
m
son constantes, entonces la combinacion lineal
x(t) = c
1
x
1
(t) + c
2
x
2
(t) + + c
m
x
m
(t)
Es tambien una solucion de (5.6).
Demostracion. La parte a) es directa. Para la b) si x(t
0
) = 0, la soluci on trivial tambien
pasa por ese punto, luego por la unicidad esta solucion debe ser la trivial. La parte c) se
sigue de lo siguiente. Como X
= A(t)X, se tiene que:
X
(t) =c
1
x
1
(t) + c
2
x
2
(t) + + c
n
x
n
(t)
=c
1
A(t)x
1
(t) + c
2
A(t)x
2
(t) + + c
n
A(t)x
n
(t)
=A(t)(c
1
x
1
(t) + c
2
x
2
(t) + + c
n
x
n
(t))
=A(t)X
Denici on 5.7. Independencia: Las funciones x
1
, x
2
, . . . , x
n
son linealmente depen-
dientes en un intervalo I si existen constantes, c
1
, c
2
, . . . , c
n
, no todas iguales a 0, tales
que
c
1
x
1
(t) + c
2
x
2
(t) + + c
n
x
n
(t) = 0
para toda t en el intervalo.
En caso contrario se dice que x
1
, x
2
, . . . , x
n
es linealmente independiente.
Sin embargo, un criterio sencillo para decidir la independencia de soluciones de un sistema
homogeneo es el siguiente
Teorema 5.8. Teorema. Sean t
0
I un n umero cualquiera, y x
1
, x
2
, . . . , x
m
solucio-
nes de (5.6). Entonces x
1
, x
2
, . . . , x
m
son linealmente dependientes sobre I si y solo si
x
1
(t
0
), x
2
(t
0
), . . . , x
m
(t
0
) son vectores de R
n
linealmente dependientes.
Este teorema tambien nos dispone de un hecho crucial.
Teorema 5.9. Teorema. Ning un conjunto linealmente independiente de soluciones de
(5.6) puede tener mas de n elementos.
166CAP
ITULO5. INTRODUCCI
ONALOS SISTEMAS DE ECUACIONES DIFERENCIALES
Corolario. Si x
1
, x
2
, . . . , x
n
es un conjunto de n soluciones linealmente independientes
de (5.6), entonces cualquier otra soluci on x(t) de (5.6) es combinaci on lineal de estas
x(t) = c
1
x
1
(t) + c
2
x
2
(t) + + c
n
x
n
(t)
Es por esta razon que un conjunto linealmente independiente de soluciones de (5.6) se
conoce como un sistema fundamental de soluciones o bien una base lineal (m as acorde
con los aspectos lineales).
El wronskiano
Cuando se trata de determinar si un conjunto
1
,
2
, . . . ,
n
de funciones con derivadas
hasta de orden n1 en un intervalo I, es linealmente independiente, usualmente se utiliza
una herramienta muy sencilla denominada el Wronskiano.
Denici on 5.10. Dadas las funciones
1
,
2
, . . . ,
n
con derivadas hasta de orden n 1
en un intervalo I,se dene su Wronskiano como el determinante (funcion):
W(
1
,
2
, . . . ,
n
) = det(I
n
A) =
1
2
. . .
n
2
. . .
n
.
.
.
.
.
.
.
.
.
.
.
.
(n1)
1
(n1)
2
. . .
(n1)
n
Teorema 5.11. Sean
1
,
2
, . . . ,
n
n funciones continuas con derivadas hasta de orden
n 1 sobre un intervalo I. Si las funciones
1
,
2
, . . . ,
n
son linealmente dependientes
sobre I entonces W
_
1
,
2
, . . . ,
n
_
.
En el caso que nos interesa podemos decir algo mas.
Teorema 5.12. Un conjunto x
1
, x
2
, . . . , x
n
de n soluciones de (5.6) constituye un sistema
fundamental si y slo si su Wronskiano nunca se anula en . El Wronskiano ser siempre
distinto de cero sobre dicho intervalo o se anular indenticamente.
Teorema 5.13. Soluciones generales de sistemas Homogeneos: Sean x
1
, x
2
, . . . , x
n
n, soluciones linealmente independientes de la ecuacion (5.5) en el intervalo I, donde A(t)
es una funcion matricial nn, continua en I. Si x(t) es cualquier solucion de la ecuacion
(5.5) sobre I entonces existen c
1
, c
2
, . . . , c
n
tales que
x(t) = c
1
x
1
(t) + c
2
x
2
(t) + + c
n
x
n
(t)
Para toda t en I.
5.3. SISTEMAS LINEALES HOMOG
ENEOS CONCOEFICIENTES CONSTANTES167
Teorema 5.14. Soluciones Generales de Sistemas No Homogeneos: Sea x
p
,
una solucion particular del sistema no homogeneo,
X
= A(t)X + g(t) (5.7)
en el intervalo I, y sea {x
1
, x
2
, . . . , x
n
} un conjunto fundamental de soluciones en I para
el sistema homogeneo (5.6). Si x(t) es cualquier solucion de la ecuacion (5.5) sobre I
con c
1
, c
2
, . . . , c
n
constantes entonces toda solucion en I se puede expresar en la forma
x(t) = x
p
(t)c
1
x
1
(t) + c
2
x
2
(t) + + c
n
x
n
(t)
5.3. Sistemas Lineales Homogeneos con Coecientes
Constantes
En esta secci on se analiza un metodo para obtener una solucion general del sistema
homogeneo
X
= A(t)X (5.8)
donde A es una matriz de tamao n n. De la misma manera que las ecuaciones diferen-
ciales lineales de primer orden con coecientes constantes, se busca una solucion de la
forma
x = e
t
u (5.9)
donde el vector u y el escalar son constantes a determinar. La cual lo obtenemos
sustituyendo en (5.8) de la siguiente manera: Derivando (5.9) y sustituyendo en (5.8)
obtenemos:
e
t
u = A(t)e
t
u = e
t
A(t)u
como e
t
no es cero podemos cancelar y reagrupando terminos tenemos:
_
A(t) I
_
u = 0
donde I es la matriz identidad y I denota la matriz diagonal con a lo largo de
la diagonal principal. Por lo tanto para resolver el sistema de ecuaciones diferenciales se
necesita obtener la soluci on de un sistema algebraico. El cual precisamente es el problema
de determinaci on de vectores y valores propios de la matriz A. Por tanto el vector
168CAP
ITULO5. INTRODUCCI
ONALOS SISTEMAS DE ECUACIONES DIFERENCIALES
x = e
t
u
es una soluci on de (5.8) denida por los valores propios de A y los vectores propios
u de A asociados a . Como los valores propios son raices del polinomio caracterstico
tienen tres posibilidades:
1. Races reales distintas.
2. Races reales repetidas.
3. Races complejas.
Teorema 5.15. n Vectores Propios Linealmente Independientes.
Suponga que A es una matriz de tama no n n con n vectores propios linealmente inde-
pendientes u
1
, u
2
, . . . , u
n
. Sea
i
el valor propio correspondiente a u
i
. Entonces
_
e
1
t
u
1
, e
2
t
u
2
, . . . , e
nt
u
n
_
es un conjunto fundamental de soluciones en (, ) para el sistema (5.8), por lo tanto
la solucion general de (5.8) es
x(t) = c
1
e
1
t
u
1
+ c
2
e
2
t
u
2
+ + c
n
e
nt
u
n
donde c
1
, c
2
, . . . , c
n
son constantes.
Demostracion. Las funciones
_
e
1
t
u
1
, e
2
t
u
2
, . . . , e
nt
u
n
_
son soluciones del sistema ho-
mogeneo. El wroskiano es:
W(t) = det
_
e
1
t
u
1
, e
2
t
u
2
, . . . , e
nt
u
n
_
= e
1
+
2
++n
det
_
u
1
, u
2
, . . . , u
n
_
En la hip otesis del teorema se supone que los vectores propios son linealmente indepen-
dientes esto implica que det
_
u
1
, u
2
, . . . , u
n
_
= 0. Por lo tanto el el wroskiano nunca se
hace cero. Es decir que el conjunto
_
e
1
t
u
1
, e
2
t
u
2
, . . . , e
nt
u
n
_
es linealmente indepen-
diente, por lo tanto es un conjunto fundamental de soluciones y de hay podemos concluir
que una soluci on general esta dada por
x(t) = c
1
e
1
t
u
1
+ c
2
e
2
t
u
2
+ + c
n
e
nt
u
n
5.3. SISTEMAS LINEALES HOMOG
ENEOS CONCOEFICIENTES CONSTANTES169
En el siguiente ejemplo tomamos el primer caso. Races reales distintas. En el cual la
soluci on general para
1
,
2
, . . . ,
n
vectores propios distintos y reales es:
x(t) = c
1
e
1
t
u
1
+ c
2
e
2
t
u
2
+ + c
n
e
nt
u
n
Ejemplo 5.16. Determine la soluci on del sistema X
= A(t)X, con A =
_
2 1
1 2
_
Solucion. Suponiendo que x = e
t
u, tenemos que
X =
_
2 1
1 2
_ _
u
1
u
2
_
=
_
u
1
u
2
_
2 1
1 2
= 0
los valores propios de A son = 1 y = 3. Si tomamos = 1 en
2 1
1 2
=
_
u
11
u
21
_
= 0
obtenemos
1 1
1 1
=
_
u
11
u
21
_
= 0, de donde resulta el sistema
_
u
11
+ u
21
= 0
u
11
u
21
= 0
es
decir u
11
= u
21
, y la soluci on general es u
1
= u
11
_
1
1
_
, u
11
R en particular tomando
u
11
= 1 se puede decir que un vector propio asociado a
1
= 1 es u
1
=
_
1
1
_
. De la
misma manera para
2
= 3, se tiene el sistema
_
u
12
+ u
22
= 0
u
12
+ u
22
= 0
de donde u
12
= u
22
,
u
12
_
1
1
_
, u
12
R en particular si u
12
= 1 un vector asociado a
2
= 3 es u
2
=
_
1
1
_
.
Una forma mas sencilla de obtener los vectores propios es la siguiente
Como u
1
y u
2
son linealmente independientes, el teorema 5.14 implica que una soluci on
general es:
x(t) = c
1
e
t
_
1
1
_
+ c
2
e
3t
_
1
1
_
170CAP
ITULO5. INTRODUCCI
ONALOS SISTEMAS DE ECUACIONES DIFERENCIALES
5.3.1. Races Reales repetidas
Cuando la ecuacion caracterstica
|A I| = 0
tiene al menos una raz repetida. se presentan dos casos para solucionar el sistema.
1. La cantidad de vectores propios linealmente independientes asociados al valor pro-
pio repetido es igual a la cantidad de veces que se repite el valor propio. La solucion
general cuando
1
se repite nveces es:
x(t) = c
1
e
1
t
u
1
+ c
2
e
2
t
u
2
+ + c
n
e
nt
u
n
2. La cantidad de vectores propios linealmente independientes asociados al valor pro-
pio repetido es menor que la cantidad de veces que se repite el valor propio. La
soluci on general es:
x(t) = c
1
e
1
t
u
1
+ c
2
e
1
t
(tu
1
+ u
2
)
El vector u
2
se determina proponiendo una segunda solucion de la forma
x (t) = e
1
t
(tu
1
+ u
2
)
Derivando y remplazando en el sistema de ecuaciones diferenciales se busca u
2
5.3.2. Races complejas conjugadas
Sea = i
Para U =
_
1
+
1
i
2
+
2
i
_
denimos b
1
=
_
1
2
_
y b
2
=
_
1
2
_
, donde tenemos dos
soluciones de la forma
S
1
=et
_
b
1
cos t + b
2
sent
_
S
2
=et
_
b
1
cos t b
2
sent
_
La solucion general es:
x(t) = c
1
S
1
+ c
2
S
2
En sistemas nn la solucion general ser a una combinacion lineal de n soluciones simples,
donde cada una de ellas se encontrara en funci on de alguno de los tres casos vistos
anteriormente.
5.4. EL PLANO TRAZA DETERMINANTE 171
5.4. El Plano Traza Determinante
Sea el sistema
x
=ax + by
y
=cx + dy
Para resolver el sistema primero calculamos los valores propios de la matriz del sistema,
donde la traza de la matriz es T = a +d y el determinante de la matriz es D = ad bc,
la ecuacion caracterstica es:
2
T + D = 0
Los valores propios se obtienen con la formula de las races de una ecuaci on de segundo
grado:
=
T
T
2
4D
2
Con T =
1
+
2
y D =
1
2
.
El estudio de los valores propios sirve para clasicar el punto (0, 0) del plano fase y las
trayectorias del sistema.
1. Si D < 0 tenemos que T
2
4D > 0 por lo tanto los valores propios son reales,
adem as se tiene los valores propios son de signos contrarios ya que D =
1
2
< 0.
El origen es un punto silla.
2. Si D > 0 se pueden plantear varios casos:
2.1 Si T
2
4D > 0, los valores propios son reales del mismo signo ya que D > 0.
a. Si T > 0 los valores propios son positivos. El origen es un nodo inestable.
b. Si T < 0 los valores propios son negativos. El origen es un nodo estable.
2.2 Si T
2
4D < 0, los valores propios son complejos conjugados.
a. Si T > 0. La parte real de los valores propios es positiva. El origen es un
punto espiral inestable.
b. Si T = 0. La parte real de los valores propios se anula. El origen es un
punto centro.
c. Si T < 0. La parte real de los valores propios es negativa. El origen es un
punto espiral estable.
172CAP
ITULO5. INTRODUCCI
ONALOS SISTEMAS DE ECUACIONES DIFERENCIALES
2.3 Si T
2
4D = 0 la ecuaci on caracterstica tendr a T
2
4D < 0 un valor propio
de multiplicidad dos del signo de T.
a. Si T > 0. El valor propio es positivo. El origen es un nodo inestable. Si
hay dos vectores propios linealmente independientes asociados al doble
valor propio, entonces el origen es un punto fuente.
b. Si T < 0. El valor propio es negativo. El origen es un nodo estable. Si hay
dos vectores propios linealmente independientes asociados al doble valor
propio, entonces el origen es un punto sumidero.
3. Si D = 0. Esto signica que el rango de la matriz del sistema es la unidad y por
lo tanto, la segunda la es m ultiplo de la primera
_
c
d
=
d
b
= k
_
. Se puede observar
adem as, que el punto (0, 0) no es un punto crtico aislado del sistema, sino que
todos los puntos de la recta y =
ax
b
(suponiendo que b no es nulo) son puntos
crticos del sistema. Las trayectorias en el plano fase son las rectas y = kx + e,
siendo e una constante.
a. Si T > 0. Las trayectorias comienzan en los puntos crticos y terminan en el
innito.
b. Si T < 0. Las trayectorias terminan en los puntos crticos y provienen del
innito.
Los casos anteriores los podemos representar en un plano cuyo eje de abscisas sea la
traza de la matriz del sistema y el eje de ordenadas el determinante. La posicion del
punto (T, D) que representa al sistema y nos da informaci on del origen de coordenadas
en el plano fase y de las trayectorias del sistema. Es suciente con representar la par abola
D =
T
2
4
.
5.5. Metodo de Eliminaci on Para Sistemas
El metodo de eliminacion de Gauss que se usa para resolver sistemas algebraicos, se
puede adaptar para resolver sistemas de ecuaciones diferenciales lineales con coecientes
constantes. Para esto, primero escribimos el sistema con notaci on de operadores, es decir
D =
d
dt
, D
2
=
d
2
dt
2
, etc. Los operadores quedaran de la forma c
n
D
n
+ c
n1
D
n1
+ +
c
1
D + c
0
que se comporta como un polinomio de grado n, que se puede factorizar.
Para aplicar el metodo a un sistema lineal de dos ecuaciones diferenciales de segundo
orden de la forma
5.5. M
ETODO DE ELIMINACI
ON PARA SISTEMAS 173
Figura 5.7:
a
1
x
(t) + a
2
x
(y) + a
3
x(t) + a
4
y
(t) + a
5
y
(t) + a
6
y(t) =f
1
(t)
a
7
x
(t) + a
8
x
(y) + a
9
x(t) + a
10
y
(t) + a
11
y
(t) + a
12
y(t) =f
2
(t)
donde a
1
, a
2
, , a
12
son constantes, que en la notacion de operadores quedara:
(a
1
D
2
+ a
2
D + a
3
)[x] + (a
4
D
2
+ a
5
D + a
6
)[y] =f
1
(t)
(a
7
D
2
+ a
8
D + a
9
)[x] + (a
10
D
2
+ a
11
D + a
12
)[y] =f
2
(t)
174CAP
ITULO5. INTRODUCCI
ONALOS SISTEMAS DE ECUACIONES DIFERENCIALES
Ejemplo 5.17. Resolver los sistemas
a)
_
x + 2y = 0
x y = 0
b) Tanques Interconectados:
Dos grandes tanques, como muestra la gura 4.5 cada uno con 100 litros de liquido,
est an conectados entre s mediante tubos de modo que el liquido uye del tanque
A al tanque B a raz on de 3 litros/minuto y del B al A a razon de 1 litro/minuto.
El lquido dentro de cada tanque se mantiene bien revuelto. Una solucion salina
con una concentraci on de 2kg/litro de sal uye hacia el tanque A a raz on de 6
litros/minuto. La soluci on (diluida) sale del sistema del tanque A a 4 litros/minuto
y del tanque B a 2 litros/minuto. Si en un principio, el tanque A contiene agua
simple y el tanque B contiene 200kg de sal, determine la masa de sal en cada tanque
en el instante t 0.
Figura 5.8:
c) Sistemas Acoplados Masa-Resorte
Dos resortes y dos masas est an unidos en lnea recta sobre una supercie horizontal
sin fricci on, como se muestra en la gura. El sistema se pone en movimiento man-
teniendo la masa en su posicion de equilibrio y jalando la masa a la izquierda de
su posicion de equilibrio una distancia de 1 metro, para luego liberar ambas masas.
Exprese la ley de Newton para el sistema y determine las ecuaciones de movimiento
para las dos masas si m
1
= 1Kg, m
2
= 2Kg, K
1
= 4
N
m
y K
2
=
10
3
N
m
.
d) Circuitos Electricos:
5.5. M
ETODO DE ELIMINACI
ON PARA SISTEMAS 175
Determinar un sistema de ecuaciones diferenciales y condiciones iniciales para la
corriente de la red en la gura 5.17. Suponga que la corriente inicial se anula.
Determine la corriente en cada rama de la red.
Figura 5.9:
Para poder plantear el problema necesitamos unos principios los cuales son:
Ley de la corriente de Kirchho: La suma algebraica de las corrientes que
uyen en cualquier punto de uni on debe ser cero.
Ley de voltaje de Kirchho: La suma algebraica de cambios instant aneos del
potencial (cadas de voltaje) en torno de cualquier lazo cerrado debe ser cero.
Un circuito en serie RLC tiene su representaci on como aparece en la gura 4.7:
Adem as debemos tener en cuenta
De acuerdo con la ley de Ohm, la cada de voltaje E
R
a traves de un resistor
es proporcional a la corriente I que pasa por el resistor:
E
R
= RI
Se puede mostrar mediante las leyes de Faraday y Lenz que la cada de voltaje
E
L
a traves de un inductor es proporcional a la razon de cambio instant anea
de la corriente I:
E
L
= L
dL
dt
La cada de voltaje E
C
a traves de un capacitor es proporcional a la carga
electrica q que aparece en las capas del capacitador:
E
C
=
1
C
q
176CAP
ITULO5. INTRODUCCI
ONALOS SISTEMAS DE ECUACIONES DIFERENCIALES
donde E(t) indica el voltaje que se proporciona al circuito en el instante t, y la ley
del voltaje de Kirchho es:
E(t) = E
L
+ E
R
+ E
C
Sustituyendo obtenemos:
E(t) = L
dL
dt
+ RI +
1
C
q,
teniendo que I =
dq
dt
la anterior ecuacion la podemos expresar de la forma
E(t) = L
d
2
q
dt
2
+ R
dq
dt
+
1
C
q
Solucion: a) Para utilizar el metodo de eliminacion primero escribimos el sistema
en terminos de operadores:
_
D[x] + 2y = 0 (1)
D[x] D[y] = 0 (2)
notamos que podemos eliminar x, si la primera ecuacion la multiplicamos por 1
y este resultado lo sumamos a la segunda ecuacion obtenemos:
D[x] 2y =0
D[x] D[y] =0
0 (2 + D)[y] = 0 (3)
es decir de (3) nos queda 2yy
= 0, podemos notar que es una ecuaci on de primer
grado, la resolvemos por variables separables y su resultado es y(t) = e
2t
c
1
. Este
resultado lo sustituimos en algunas de las ecuaciones (1) y (2), si reemplazamos
en (1) queda D[x] + 2e
2t
c
1
= 0 es decir x
+ 2e
2t
c
1
= 0 que corresponde a una
ecuaci on diferencial de primer orden que se puede resolver por variables separables
y su soluci on es x(t) = e
2t
c
1
+ c
2
.
5.5. M
ETODO DE ELIMINACI
ON PARA SISTEMAS 177
Solucion: b) Para solucionar primero planteamos el sistema de ecuaciones. Notamos que
el volumen del lquido en cada tanque es constante e igual a 100 litros, debido al equilibrio
entre las razones de entrada y salida. Por lo tanto tenemos dos funciones inc ognitas de
t: la masa de sal x(t) en el tanque A y la masa de sal y(t) en el tanque B. Si centramos
nuestra atenci on en un tanque a la vez, podemos deducir dos ecuaciones que relacionen
estas incognitas.
Para formular las ecuaciones de este sistema, igualamos la raz on de cambio de sal en
cada tanque con la razon neta con la que se transere la sal a ese tanque. La concen-
traci on de sal en el tanque A es x(t)Kg/100lt, de modo que el tubo superior lleva sal al
tanque A a raz on de 6l/min 2Kg/l = 12Kg/min, tambien un tubo superior saca sal del
tanque a raz on de 3 lt/min x(t)Kg/100lt; de manera similar, el tubo inferior lleva sal al
tanque A a raz on de 1lt/min y(t)Kg/100lt y hay un tubo inferior que saca sal a raz on
de 4lt/min x(t)Kg/100lt (la concentraci on en el tanque B es y(t)Kg/100lt). Tenemos
entonces:
dx
dt
= Raz on de entrada - Razon de salida,
de modo que la razon de cambio de la masa de sal en el tanque A es
dx
dt
=12
Kg
min
+ 1
lt
min
y(t)Kg
100lt
4
lt
min
x(t)Kg
100lt
3
lt
min
x(t)Kg
100lt
dx
dt
=12 +
y(t)
100
4
x(t)
100
3
x(t)
100
La raz on de cambio de sal en el tanque B se determina mediante los mismos tubos
de conexion y por el tubo de drenado, que saca 2lt/min y(t)Kg/100lt:
dy
dt
=3
lt
min
x(t)Kg
100lt
1
lt
min
y(t)Kg
100lt
2
lt
min
y(t)Kg
100lt
dy
dt
=3
x(t)
100
y(t)
100
2
y(t)
100
As los tanques interconectados quedan descritos mediante un sistema de ecuaciones
diferenciales:
x
=12 +
y
100
4
x
100
3
x
100
y
=3
x
100
y
100
2
y
100
178CAP
ITULO5. INTRODUCCI
ONALOS SISTEMAS DE ECUACIONES DIFERENCIALES
Para utilizar el metodo de eliminaci on primero escribimos el sistema en terminos de
operadores:
_
_
_
D +
7
100
_
[x]
y
100
= 12 (5)
3x
100
+
_
D +
3
100
[y]
_
= 0 (6)
notamos que podemos eliminar x, si la primera ecuacion la multiplicamos por 3/100 y la
segunda por D + 7/100 estos resultados los sumamos y obtenemos:
_
_
_
D +
7
100
_
3
100
[x]
3y
10000
=
36
100
_
D +
7
100
_
3x
100
+
_
D +
7
100
__
D +
3
100
[y]
_
= 0
_
D
2
+
1
10
D +
21
10000
_
y
3
10000
y =
36
100
(7)
es decir de (7) nos queda y
+
1
10
y
+
18
10000
y =
36
100
, podemos notar que es una ecuaci on
de segundo grado no homogenea con coecientes constantes.
Primero resolvemos la homogenea y obtenemos:
y
h
= c
1
e
5+
7
100
t
+ c
1
2e
5
7
100
t
la solucion particular la resolvemos por coecientes constantes, y
p
= 200, por lo tanto la
soluci on general de la ecuacion es:
y(t) = c
1
e
5+
7
100
t
+ c
2
e
5
7
100
t
+ 200 (5.10)
Este resultado lo reemplazamos en (6) y nos da como resultado:
x(t) = c
1
e
5+
7
100
t
_
2 +
7
3
_
+ c
2
e
5
7
100
t
_
2
7
3
_
+ 200 (5.11)
las ecuaciones (4.5) y (4.6) contienen dos parametros indeterminados,c
1
y c
2
, que podemos
hallar utilizando las condiciones iniciales x(0) = 0 y y(0) = 200
5.5. M
ETODO DE ELIMINACI
ON PARA SISTEMAS 179
0 = x(0) =c
1
e
5+
7
100
0
_
2 +
7
3
_
+ c
2
e
5
7
100
0
_
2
7
3
_
+ 200
200 = y(0) =c
1
e
5+
7
100
0
+ c
2
e
5
7
100
0
+ 200
_
_
0 = c
1
_
2 +
7
3
_
+ c
2
_
2
7
3
_
200 = c
1
+ c
2
+ 200
(5.12)
resolviendo el sistema de ecuaciones (4.7) obtenemos que c
1
= 300/
7 y c
2
=
300/
7.
As las masas de sal en los tanques A y B en el instante t son, respectivamente,
y(t) =
300
7
e
5+
7
100
t
+
300
7
e
5
7
100
t
+ 200Kg
x(t) =
_
100
200
7
_
e
5+
7
100
t
_
100 +
200
7
_
e
5
7
100
t
+ 200Kg
Solucion. c) Para solucionar primero planteamos el sistema de ecuaciones.
En los sistemas acoplados masa resorte tenemos la ley de Hooke, arma que la fuer-
za que act ua sobre un objeto debido a un resorte tiene una magnitud proporcional al
desplazamiento del resorte a partir de su longitud natural y tiene direcci on opuesta a su
desplazamiento. Es decir si el resorte se estira o comprime, entonces trata de regresar a
su longitud original.
Como cada masa se puede mover libremente, aplicamos la segunda ley de Newton
a cada objeto. Sea x(t) el desplazamiento de la masa m
1
a partir de su posicion de
equilibrio, y y(t) el desplazamiento correspondiente a la masa m
2
. La masa m
1
tiene una
fuerza F
1
que act ua a la derecha debido al resorte. La masa m
2
tiene una fuerza F
2
que
act ua a la izquierda debido al segundo resorte y una fuerza F
3
que act ua a la izquierda
debido al primer resorte.
Aplicando la ley de Hooke:
F
1
= K
1
(y K), F
2
= K
1
(y K), F
3
= K
2
y
180CAP
ITULO5. INTRODUCCI
ONALOS SISTEMAS DE ECUACIONES DIFERENCIALES
yx es el desplazamiento neto del segundo resorte con respecto de su longitud original.
Al aplicar la segunda ley de Newton tenemos:
_
_
m
1
d
2
x
dt
2
= F
1
= K
1
(y x)
m
2
d
2
dt
2
= F
2
+ F
3
= K
1
(y x) K
2
y
sustituyendo los valores obtenemos:
_
_
d
2
x
dt
2
= 4(y x)
2
d
2
dt
2
= 4(y x)
10
3
y
Para utilizar el metodo de eliminaci on primero escribimos el sistema en terminos de
operadores:
_
_
_
(D
2
+ 4)x 4y
2x +
_
D
2
+
11
3
_
y = 0
notamos que podemos eliminar y, si la primera ecuaci on la multiplicamos por D
2
+
11/3 y la segunda por 4 estos resultados los sumamos y obtenemos:
_
_
(D
2
+ 4)
_
D
2
+
11
3
_
[x] 4
_
D
2
+
11
3
_
[y] = 0
8x + 4
_
D
2
+
11
3
_
[y] = 0
(D
2
+ 4)
_
D
2
+
11
3
_
[x] 8x = 0
(5.13)
es decir de (4.8) nos queda x
IV
+
23
3
x
+
20
3
x = 0, podemos notar que es una ecuaci on
de cuarto grado homogenea con coecientes constantes.
Primero resolvemos la homogenea y obtenemos:
x(t) = c
1
cos t + c
2
sent + c
3
cos
_
20
3
t + c
4
sen
_
20
3
t (5.14)
5.5. M
ETODO DE ELIMINACI
ON PARA SISTEMAS 181
Este resultado lo reemplazamos en
d
2
x
dt
2
= 4(y x) y nos da como resultado:
y(t) =
3
4
c
1
cos t +
3
4
c
2
sent
2
3
c
3
cos
_
20
3
t
2
3
c
4
sen
_
20
3
t (5.15)
las formulas (4.9) y (4.10) contienen cuatro parametros indeterminados, c
1
, c
2
, c
3
y c
4
,
que podemos hallar utilizando las condiciones iniciales x(0) = 1, x
(0) = 0, y(0) = 0
y y
(0) = 0.
x(0) =c
1
+ c
4
x
(0) =c
2
+
_
20
3
c
3
y(0) =c
1
3
4
2
3
c
4
y
(0) =c
2
3
4
2
3
_
20
3
c
3
resolviendo el sistema de ecuaciones:
_
_
1 = c
1
+ c
4
0 = c
2
+
_
20
3
c
3
0 = c
1
3
4
2
3
c
4
0 = c
2
3
4
2
3
_
20
3
c
3
obtenemos que c
1
= 8/17, c
2
= 0 c
3
= 0 y c
4
= 9/17.
As las masas de movimiento para la m
1
y m
2
en el instante t son, respectivamente,
x(t) =
8
17
cos t
9
17
cos
_
20
3
t
y(t) =
6
17
cos t +
6
17
cos
_
20
3
t
182CAP
ITULO5. INTRODUCCI
ONALOS SISTEMAS DE ECUACIONES DIFERENCIALES
Solucion: d) Para solucionar primero determinamos la carga y corrientes en la red electri-
ca, notamos inicialmente que la red tiene tres circuitos cerrados.
El primero a traves de la batera 10V, el resistor 10, y el inductor 20 H. El segundo
pasa por la batera 10 V, el resistor 10, otro resistor 5, el capacitador 1/30 F. El
tercero un inductor 20 H, el resistor 5 y el capacitador 1/30 F.
Sea I
1
la corriente que pasa por la batera y el resistor. I
2
la corriente que pasa
por el inductor y I
3
la corriente que pasa por el capacitador. Denotamos la carga en el
capacitador como q
3
, por lo tanto I
3
=
dq
3
dt
.
Tomando las ecuaciones sabemos que la cada del voltaje en un resistor RI, en un
inductor es LdL/dt y en un capacitador es q/C.
As aplicando la ley de voltaje de Kirchho para cada uno de los circuitos electricos
es:
Primero: Batera = Resistor + Inductor
10V = 10I
1
+ 20
dI
2
dt
Segundo: Batera = Resistor + Capacitador
10V = 10I
1
+ 5I
3
+ 30q
3
Tercero: Inductor + Resistencia + Capacitador = 0
20
dI
2
dt
+ 5I
3
+ 30q
3
= 0
El signo menos en la ultima ecuacion surge al considerar una trayectoria en sentido
de las manecillas del reloj, de modo que la corriente que pasa por el inductor es I
2
.
Luego tenemos un sistema de ecuaciones:
_
_
10 = 10I
1
+ 20
dI
2
dt
10 = 10I
1
+ 5I
3
+ 30q
3
10 = 20
dI
2
dt
+ 5I
3
+ 30q
3
notemos que la ultima ecuacion del sistema se obtiene de restar la primera y segunda,
por lo tanto solo tenemos dos ecuaciones para determinar I
1
, I
2
y q
3
.
5.5. M
ETODO DE ELIMINACI
ON PARA SISTEMAS 183
Si ahora aplicamos la ley de Kirchho al punto de uni on B en la red vemos que:
I
2
+ I
3
I
1
= 0 (5.16)
reemplazando I
3
=
dq
3
dt
en la ecuaci on (4.11), la ecuaci on 10 = 20
dI
2
dt
+ 5I
3
+ 30q
3
la
sustituimos por la (4.11) con el cambio hecho, luego el sistema de ecuaciones es:
_
_
10 = 10I
1
+ 20
dI
2
dt
10 = 10I
1
+ 5
dq
3
dt
+ 30q
3
10 = I
2
+
dq
3
dt
I
1
Para utilizar el metodo de eliminaci on primero escribimos el sistema en terminos de
operadores:
_
_
10 = 10I
1
+ 20D[I
2
]
10 = 10I
1
+ (5D + 30)[q
3
]
10 = I
2
I
1
D[q
3
]
despejando I
1
de la ecuaci on 10 = I
2
I
1
D[q
3
] y sustituyendo en las ecuaciones
10 = 10I
1
+ 20D[I
2
] y 10 = 10I
1
+ (5D + 30)[q
3
] obtenemos el siguiente sistema de
ecuaciones:
_
1 = (1 + 2D)I
1
2 + D[q
2
3]
2 = 2I
2
+ (3D + 6)[q
3
]
notamos que podemos eliminar I
2
, si la primera ecuacion la multiplicamos por, -2 y
la segunda por 1 + 2D estos resultados los sumamos y obtenemos:
_
_
(D
2
+ 4)
_
D
2
+
11
3
_
[x] 4
_
D
2
+
11
3
_
[y] = 0
8x + 4
_
D
2
+
11
3
_
[y] = 0
(D
2
+ 4)
_
D
2
+
11
3
_
[x] 8x = 0
(5.17)
es decir de (4.12) nos queda 6q
3
+13q
3
+6q
3
= 0, podemos notar que es una ecuaci on
de segundo grado homogenea con coecientes constantes.
184CAP
ITULO5. INTRODUCCI
ONALOS SISTEMAS DE ECUACIONES DIFERENCIALES
Primero resolvemos la homogenea y obtenemos:
q
3
(t) = c
1
e
3
2
t
+ c
2
e
2
3
t
(5.18)
Este resultado lo reemplazamos en la ecuacion 2 = 2I
2
+ (3D + 6)[q
3
] y nos da como
resultado:
I
2
(t)(t) =
3
4
c
1
e
3
2
t
2c
2
e
2
3
t
+ 1 (5.19)
como obtuvimos I
1
= I
2
+ Dq
3
reemplazando I
2
, tenemos:
I
1
(t)(t) =
9
4
c
1
e
3
2
t
8
3
c
2
e
2
3
t
+ 1 (5.20)
las formulas (4.13), (4.14) y (4.15) contienen dos par ametros indeterminados, c
1
y c
2
,
que podemos hallar utilizando las condiciones iniciales I
1
(0) = 0, I
2
(0) = 0 y I
3
(0) = 0.
I
2
(0) =
3
4
c
1
2c
2
+ 1
I
1
(0) =
9
4
c
1
8
3
c
2
+ 1
resolviendo el sistema de ecuaciones:
_
_
0 =
3
4
c
1
2c
2
+ 1
0 =
9
4
c
1
8
3
c
2
+ 1
obtenemos que c
1
= 4/15 y c
2
= 3/5.
As las corrientes I
1
y I
2
en el instante t est an dadas por:
I
1
(t)(t) =
3
5
e
3
2
t
8
5
e
2
3
t
+ 1
I
2
(t)(t) =
1
5
e
3
2
t
6
5
e
2
3
t
+ 1
Para hallar I
3
recuerde que I
3
=
dq
3
dt
por lo tanto derivando q
3
(t) = c
1
e
3
2
t
+ c
2
e
2
3
t
obtenemos I
3
(t) =
2
5
e
3
2
t
2
5
e
2
3
t
.
5.5. M
ETODO DE ELIMINACI
ON PARA SISTEMAS 185
Ejercicio 5.18. 1. Hay dos tanques, A y B, y 100 galones de salmuera en cada uno.
Al principio, el tanque A contiene 100 libras de sal disueltas y el B, 50 libras. El
sistema es cerrado, por que los lquidos bien agitados solo pasan de un tanque al
otro como vemos en la gura.
a) Use la informacion de la gura (4.7) para formar un modelo matem atico de
las libras de sal x
1
(t) y x
2
(t) en cualquier tiempo en los tranques A y B,
respectivamente.
b) Determine una relacion entre las variables x
1
(t) y x
2
(t), valida para cualquier
tiempo t. Explique por que esta relaci on tiene sentido. Emplee esta relaci on
como ayuda para hallar la cantidad de sal en el tanque b cuando t = 30 min.
Figura 5.10:
2. Con la informaci on de la gura (4.8) formule un modelo matematico para la canti-
dad de libras de sal, x
1
(t), x
2
(t) y x
3
(t) en cualquier tiempo t en los tanques A, B,
y C respectivamente.
Figura 5.11:
3. Dos resortes, dos masas dos amortiguadores se unen en lnea recta sobre una super-
cie horizontal sin fricci on como se muestra en la gura. El amortiguador proporciona
una fuerza de amortiguamiento sobre la masa m
2
, dada por F = by
. Deduzca el
sistema de ecuaciones para los desplazamientos x y y.
186CAP
ITULO5. INTRODUCCI
ONALOS SISTEMAS DE ECUACIONES DIFERENCIALES
4. Dos resortes, dos masas y un amortiguador se unen en lnea recta sobre una su-
percie horizontal sin friccion, como se muestra en la gura. El sistema se pone
en movimiento manteniendo la masa m
2
en su posici on de equilibrio y jalando la
masa m
1
a la izquierda de su posicion de equilibrio a una distancia de 2 m, para
luego liberar ambas masas. Determine las ecuaciones de movimiento para las dos
masas si m
1
= m
2
= 1Kg, K
1
= K
2
= 1N/m y b = 1N s/m. [Sugerencia: El
amortiguador act ua sobre m
1
y m
2
con una fuerza de magnitud b|y
|].
Captulo 6
Transformada de Laplace
En este captulo se estudiara un metodo de resolucion de ecuaciones diferenciales con valor
inicial en el origen, llamado metodo de la transformada de Laplace. La idea consiste, en
transformar un problema analtico en uno algebraico, donde all es f acil de resolver y luego
trasformar esta solucion al problema original (analtico). Este metodo fue inspirado por
Euler y utilizado extensivamente por Laplace, de ah que se conozca con el nombre de
trasformada de Laplace. Esta transformada hace parte de las llamadas transformadas
integrales que en su forma general se escriben como
T
_
f(x)
=
_
I
K(t, s)f(t)dt.
Donde I es un intervalo de la recta real y K(t, s) se conoce como el n ucleo de la transfor-
maci on y s es la variable de la transformada. El caso que vamos a considerar es cuando
I = [0, +) y K(t, s) = e
st
.
6.1. Transformada de Laplace
Denici on 6.1. Sea f(t) una funci on denida sobre [0, +) se dene la transformada
de Laplace de f, L(f) como
L(f)(s) = F(s) =
_
0
f(t)e
st
dt,
siempre que la integral impropia converge. N otese la transformada de Laplace aplicada
a una funci on es de nuevo una funci on, a saber, L(f) o F.
187
188 CAP
ITULO 6. TRANSFORMADA DE LAPLACE
Ejemplo 6.2. Halle la transformada de Laplace de la funci on constante denida por
f(t) = 1.
Solucion.
L(f)(s) =
_
0
1e
st
dt = lm
N
_
N
0
1e
st
dt
= lm
N
1
s
e
st
t=N
t=0
= lm
N
_
1
s
e
sN
+
1
s
_
=
1
s
, siempre que s > 0
Ejemplo 6.3. Determinar la transformada de Laplace de la funci on dada por f(t) = t
2
.
Solucion. Usamos la denici on de trasformada de Laplace:
L(t
2
)(s) =
_
0
t
2
e
st
dt
= lm
N
_
N
0
t
2
e
st
dt
= lm
N
_
t
2
e
st
s
2te
st
s
2
2e
st
s
3
_
N
0
= lm
N
_
N
2
e
sN
s
2Ne
sN
s
2
2e
sN
s
3
+
2
s
3
_
.
Como
N
2
e
sN
s
2Ne
sN
s
2
2e
sN
s
3
0 cuando s > 0 y N , obtenemos:
F(s) =
2
s
3
para s > 0.
Ejemplo 6.4. Determinar la transformada de Laplace de la funcion dada por f(t) =
cos(2t).
6.1. TRANSFORMADA DE LAPLACE 189
Solucion.
L(cos(2t))(s) =
_
0
cos(2t)e
st
dt
= lm
N
_
N
0
cos(2t)e
st
dt
= lm
N
_
2 sin(2t)e
st
s
2
+ 4
s cos(2t)te
st
s
2
+ 4
_
N
0
= lm
N
_
2sen(2N)e
sN
s
2
+ 4
s cos(2N)te
sN
s
2
+ 4
+
s
s
2
+ 4
_
como
2 sin(2N)e
sN
s
2
+4
s cos(2N)te
sN
s
2
+4
0 cuando s > 0 y N , obtenemos:
F(s) =
2
s
2
+ 4
, para s > 0.
Ejemplo 6.5. Determinar la transformada de Laplace de la funci on denida como
f(x) =
_
e
2t
, 0 < t < 3
1, t > 3
.
Solucion: Usamos la denici on de trasformada de Laplace:
L(f(t))(s) =
_
3
0
e
2t
e
st
dt +
_
3
1e
st
dt
=
_
3
0
e
2t
e
st
dt + lm
N
_
N
0
e
st
dt
=
_
e
t(2s)
2 s
_
3
0
+ lm
N
_
e
st
s
_
N
3
=
e
3(2s)
2 s
1
2 s
+ lm
N
e
sN
s
e
s3
s
como
e
Ns
s
0 cuando s > 0 y N , obtenemos:
F(s) =
1 e
3(2s)
s 2
e
s3
s
, para s > 2.
190 CAP
ITULO 6. TRANSFORMADA DE LAPLACE
Ejemplo 6.6. Determinar la transformada de Laplace de la funci on parte entera
[x] = mayor entero menor o igual que x.
Solucion: Usamos la denici on de trasformada de Laplace:
L
_
[t]
_
(s) =
_
0
[t]e
st
dt =
_
1
[t]e
st
dt
=
n=1
_
n+1
n
[t]e
st
dt =
n=1
_
n+1
n
ne
st
dt
=
n=1
n
_
1
s
e
st
_
t=n+1
t=n
=
1
s
n=1
n
_
e
sn
e
s(n+1)
_
=
1
s
n=1
ne
sn
(1 e
s
) =
1 e
s
s
n=1
n(e
s
)
n
=
1 e
s
s
e
s
_
1 e
s
_
2
=
1
s(e
s
1)
, si s > 0.
Por tanto,
L
_
[t]
_
(s) =
1
s(e
s
1)
.
Aqu se us o el valor de la serie
n=1
nx
n
=
x
_
1 x
2
_, si |x| < 1.
N otese c omo la transformada de Laplace suaviza una funci on como parte entera.
La siguiente propiedad justica el nombre de transformada.
6.1.1. Linealidad de la transformada
Teorema 6.7. Sean f
1
y f
2
funciones cuyas transformada de Laplace existen para s >
y sea k una constante. Entonces para s > .
1. L(f
1
+ f
2
) = L(f
1
) +L(f
2
).
6.1. TRANSFORMADA DE LAPLACE 191
2. L(kf(t)) = kL(f(t)).
La pregunta que sigue es que condiciones son sucientes para garantizar la existencia
de la transformada de Laplace de una funci on?, para ello presentamos las siguientes
deniciones que seran utiles para responder tal inquietud.
Denici on 6.8. Una funci on f es continua por partes (o a trozos) en un intervalo nito
[a, b] si f es continua en cada punto de [a, b] excepto quiza en un n umero nito de puntos
donde f tiene una discontinuidad de salto (los lmites laterales existen). Una funci on f
es continua por partes en [0, ) si f es continua por partes en [0, N] para todo N > 0.
Por supuesto, todas las funciones continuas son continuas a trozos.
Ejemplo 6.9. La funcion dada anteriormente denida como
f(x) =
_
e
2t
, 0 < t < 3
1, t > 3
,
es continua a trozos, pues en x = 3, que es el unico punto de discontinuidad, los lmites
laterales existen (y son nitos)
lm
t3
f(t) = lm
t3
e
2t
= e
6
y lm
t3
+
f(t) = lm
t3
+
1 = 1.
Denici on 6.10. Una funci on f(t) es de orden exponencial si existe constantes posi-
tivas T y M tales que:
|f(t)| Me
t
, para toda t T.
En otras palabras, f es de orden exponencial si |f| se puede acotar por encima por una
funci on de la forma Me
t
con M > 0 a partir de un n umero positivo T en adelante.
Ejemplo 6.11. Cualquier la funci on de la forma f(t) = Me
t
es de orden exponencial,
claramente con t > 0.
Ejemplo 6.12. Toda funcion f acotada con
f(t)
M es de orden exponencial, to-
mando = 0. En particular, las funciones sin(x) y cos(x) son de orden exponencial.
192 CAP
ITULO 6. TRANSFORMADA DE LAPLACE
Ejemplo 6.13. La funci on f denida como f(t) = t
n
es de orden exponencial. Se sabe
que para > 0
lm
t
t
n
e
t
= 0.
Esto signica que dado > 0 existe N > 0 tal que si T > N entonces
t
n
e
t
< , en
particular tomando = 1, existir a N
0
> 0 tal que
t
n
e
t
< 1 si, y s olo si
t
n
< e
t
siempre
que t > N
0
. Como consecuencia de esto, puede verse que toda funcion polin omica es de
orden exponencial.
Ejemplo 6.14. La funci on parte entera es de orden exponencial. Esto se debe al hecho
que
|t|
t + 1, para t > 0
pero la funci on del lado derecho es de orden exponencial (pues es un polinomio), luego
la parte entera es de orden exponencial.
Ejemplo 6.15. La funci on denida por f(t) = e
t
2
, no es de orden exponencial puesto
que para cualquier > 0, la funci on
e
t
2
e
t
= e
t
2
t
no es acotada.
Teorema 6.16. Si f es continua por partes en [0, ) y de orden exponencial , entonces
L(f(t))(s) existe para s > .
La siguiente proposicion nos da un criterio sencillo para decidir cu ando una funci on F
no puede ser una transformada de Laplace.
Proposicion. Si lm
s
F(s) = 0, entonces F no es la transformada de Laplace de ninguna
funci on de orden exponencial.
Ejemplo 6.17. Una funci on constante F(s) = c = 0 no puede ser la transformada de
Laplace de ninguna funci on de orden exponencial.
6.1. TRANSFORMADA DE LAPLACE 193
Ejemplo 6.18. La funcion denida por F(s) =
s
1s
no puede ser una transformada de
Laplace de ninguna funci on de orden exponencial, pues lm
s
F(s) = 1 = 0.
En la pr actica, estaremos trabajando siempre con funciones de orden exponencial.
La funci on gamma se dene como () =
_
0
t
1
e
t
dt para > 0 (pues siempre con-
verge para estos valores) y puede verse que
(n + 1) = n!.
Como un caso especial de la funcion gamma, obtenemos la transformada de Laplace
siguiente
L(t
1
)(s) =
_
0
t
1
e
st
dt =
()
s
, para > 0.
Por tanto,
L(t
)(s) =
( + 1)
s
+1
, para > 1.
En especial,
L(t
n
)(s) =
n!
s
n+1
.
Ejemplo 6.19. La funcion denida por
_
t
1
2
, si t > 0
0, si t = 0
.
No es continua a trozos, de hecho, la discontinuidad en 0 es innita, sin embargo, la
transformada de Laplace existe, pues
L(t
1
2
)(s) =
(
1
2
)
s
1
2
,
con un poco de cuidado se puede encontrar que (
1
2
) =
.
Ejemplo 6.20. Determinar la transformada de Laplace de . t
3
te
t
+ e
4t
cos(t).
194 CAP
ITULO 6. TRANSFORMADA DE LAPLACE
f(t) L(f(t)) = F(s)
1
1
s
, s > 0
e
at 1
sa
, s > a
t
n
e
at
, n = 1, 2,
n!
(sa)
n+1
, s > a
sen(bt)
b
s
2
+b
2
, s > 0
cos(bt)
s
s
2
+b
2
, s > 0
e
at
sen(bt)
b
(sa)
2
+b
2
, s > a
e
at
cos(bt)
s
(sa)
2
+b
2
, s > a
[t]
1
s(e
s
1)
, s > 1
Tabla 6.1: Algunas Transformaciones de Laplace
Solucion. Sabemos que la transformada de Laplace es una transformacion lineal, por lo
tanto tenemos:
L
_
t
3
te
t
+ e
4t
cos(t)
_
(s) = L(t
3
) L(te
t
) +L(e
4t
cos(t)).
Para hallar L(t
3
) utilizamos la formula del rengl on 3, en este caso n = 3 y L(t
3
) =
3!
s
3+1
=
6
s
4
. Para hallar L(te
t
) utilizamos la formula del renglon 4, en este caso n = 1, a = 1 y
L(te
t
) =
1!
(s1)
1+1
=
1
(s+1)
2
. Finalmente, para hallar L(e
4t
cos(t)) utilizamos la f ormula del
7 renglon de la tabla 1 con a = 4 y b = 1 en cuyo caso tenemos
L(e
4t
cos(t)) =
s 4
(s 4)
2
+ 1
6.1. TRANSFORMADA DE LAPLACE 195
con lo que
L
_
t
3
te
t
+ e
4t
cos(t)
_
(s) =L(t
3
) L(te
t
) +L(e
4t
cos(t)
=
6
s
4
1
(s + 1)
2
+
s 4
(s 4)
2
+ 1
.
Ejemplo 6.21. Determinar la transformada de Laplace de e
3t
sen(6t) t
3
+ e
t
Solucion. Dejamos al lector para que identique las f ormulas que hemos utilizado
L
_
e
3t
sin(6t) t
3
+ e
t
_
(s) =L(e
3t
sin(6t)) L(t
3
) +L(e
t
)
=
s 3
(s 3)
2
+ 36
6
s
4
+
1
(s 1)
.
Ejemplo 6.22. Hallar la transformada de Laplace de la funci on parte decimal denida
por f(t) = t [t], conocida com unmente como diente de sierra.
Solucion. Aplicando la linealidad de la transformada tenemos
L
_
t [t]
_
(s) =L(t) L([t])
=
1
s
2
1
s(e
s
1)
Ejemplo 6.23. Con los resultados que aparecen en la Tabla 1. calcular L
_
sin
2
(at)
_
(s).
Solucion. Por las identidades trigonometricas sabemos que sen
2
t =
1cos(2t)
2
, de tal forma
que
L
_
sen
2
(at)
_
(s) =L
_
1 cos(2at)
2
_
(s)
=
1
2
L(1)
1
2
L(cos(2at))
=
1
2
_
1
s
s
(s
2
+ 4a
2
)
_
=
2a
2
s(s
2
+ 4a
2
)
196 CAP
ITULO 6. TRANSFORMADA DE LAPLACE
6.1.2. Propiedades de la Transformada de Laplace
A. Transformada de una Derivada
Teorema 6.24. Sea f continua en [0, ) y f
continua por partes en [0, ), ambas
de orden exponencial . Entonces para s > existe la transformada de f
:
L(f
(t)) =F(s) =
_
0
f
(t)e
st
dt (6.1)
=sL(f(t)) y(0).
Ejemplo 6.25. Consideremos la funcion f(t) = sin
2
(at), y como ya vimos F(s) =
2a
2
s(s
2
+4a
2
)
, la funci on satisface las condiciones del teorema anterior, por tanto
L(f
(t))(s) =L(f(t)) y(0)
L(2a sin(at) cos(at)) =sL(sin
2
(at)) sin
2
(0)
L(2 sin(at) cos(at)) =
s
a
L(sin
2
(at))
L(sin(2at)) =
s
a
2a
2
s(s
2
+ 4a
2
)
L(sin(2at)) =
2a
(s
2
+ 4a
2
)
.
En particular
L(sin at) =
2a
(s
2
+ a
2
)
.
B. Formula de desplazamiento:
Teorema 6.26. Si la transformada de laplace L(f(t))s = F(s) existe para s > ,
entonces:
L(e
at
f(t))[s] = F(s a) para s > + a. (6.2)
Ejemplo 6.27. Como sabemos la funci on denida como f(t) = 1 tiene trans-
formada
1
s
. Por tanto, la funci on g denida como g(t) = e
at
1 tiene transformada
G(s) = F(s a) =
1
sa
, como se haba visto antes.
6.1. TRANSFORMADA DE LAPLACE 197
Ejemplo 6.28. Como sabemos la funci on denida como f(t) = cos(bt) tiene trans-
formada F(s) =
s
s
2
+b
2
. Por tanto, la funcion g denida como g(t) = e
at
cos(bt) tiene
transformada G(s) = F(s a) =
sa
(sa)
2
+b
2
, como se haba visto antes.
Ejemplo 6.29. Encontrar una funci on cuya transformada de Laplace es G(s) =
s
s
2
+s+1
.
Solucion.
G(s) =
s
s
2
+ s + 1
=
1
_
s +
1
2
_
+
3
4
.
Vemos que corresponde a un caso particular del ejemplo anterior a =
1
2
y b =
_
3
4
=
3
2
, luego una funci on puede ser g(t) = e
3
2
t
cos
_
3
2
t
_
.
C. Transformada de Productos del Tipo t
n
f(t)
Teorema 6.30. Sea f(t) continua por partes en [0, ) y de orden exponencial .
Entonces para s > .
L(t
n
f(t))[s] = (1)
n
d
n
F
ds
n
(s). (6.3)
Ejemplo 6.31. Calcular la transformada de la funci on denida por g(t) = t
2
[t]
donde [t] denota la parte entera de t.
Solucion. Aplicaremos el teorema anterior (con n = 2). Como sabemos, la funcion
parte entera tiene transformada L
_
[t]
_
(s) = F(s) =
1
s(e
s
1)
. Por tanto,
L
_
t
2
[t]
_
=(1)
2
F
(s)
=
e
2s
_
s
2
+ 2s + 2
_
+ s
_
s
2
2s 4
_
+ 2
s
3
(e
s
1)
3
.
198 CAP
ITULO 6. TRANSFORMADA DE LAPLACE
6.2. Transformada Inversa de Laplace
El siguiente teorema nos dice que la transformada de Laplace es inyectiva, lo que permite
hablar de la transformada inversa y como veremos es lineal. Este hecho es clave para
resolver algunos problemas de ecuaciones diferenciales con valor inicial en el origen, como
se haba mencionado al comienzo del captulo.
Teorema 6.32. Sean f y g funciones continuas sobre [0, ), de orden exponencial tales
que la transformada de Laplace existe para cada una y cuyas transformadas son iguales,
L(f) = L(g) entones f(t) = g(t) para todo t 0.
Denici on 6.33. Se dene la transformada inversa de Laplace como L
1
(F(s)), de modo
que :
L(f(t)) = F(s), entonces L
1
(F(s)) = f(t).
Como es natural, mientras conozcamos transformadas de muchas funciones, ser a m as
f acil encontrar la transformada inversa de alguna funci on.
Linealidad de la transformada Inversa
Teorema 6.34. Suponga que L
1
(F), L
1
(F
1
) y L
1
(F
2
) existen y son funciones conti-
nuas en [0, ) y sea k una constante, entonces.
(1.) L
1
(F
1
+ F
2
) = L
1
(F
1
) +L
1
(F
2
).
(2.) L
1
(kF(s)) = kL
1
(F(s)).
Metodo de las fracciones Parciales
A continuacion se da un metodo para hallar la transformada inversa de funciones racio-
nales de la forma:
F(s) =
Q(s)
P(s)
,
donde Q(s) y P(s) son polinomios en la variable s (con grado de P mayor que el de Q),
se acostumbra a hacer lo siguiente:
1) Descomponer F(s) en fracciones simples. Para ello:
6.2. TRANSFORMADA INVERSA DE LAPLACE 199
(a.) Encontrar la races de P(s). Tomamos una de sus races reales con multipli-
cidad m, y a ib a una de las races complejas y su conjugada. De esta forma
podemos expresar P(s) = (s )
m
[(s a)
2
+ b
2
]
(b.) Y as escribimos F(s) como:
F(s) =
Q(s)
P(s)
=
A
1
s
+ +
A
m
(s )
m
+
B(s a) + Cb
(s a)
2
+ b
2
+
(c.) Determinar los coecientes A
1
, A
m
, B
s
, C.
2) Para calcular la transformada inversa L
1
(F(s)) = f(t) obtenemos:
L
1
(F(s)) = L
1
_
A
1
s
+ +
A
m
(s )
m
+
B(s a) + Cb
(s a)
2
+ b
2
+
_
.
3) Como la transformada inversa es una transformaci on lineal, aplicamos esta lineali-
dad y tenemos:
L
1
(F(s)) = L
1
_
A
1
s
_
+ +L
1
_
A
m
(s )
m
_
+L
1
_
B(s a) + Cb
(s a)
2
+ b
2
_
+
Ejemplo 6.35. Hallar la transformada inversa de:
F(s) =
7s
2
+ 23s + 30
(s 2)(s
2
+ 2s + 5)
.
Solucion. Primero hallamos la descomposicion en fracciones parciales de F(s). Observa-
mos que el factor cuadr atico s
2
+2s+5 tiene una raz imaginaria, con su correspondiente
conjugada, que es 1 2i de donde podemos expresar este factor cuadr atico como:
s
2
+2s +5 = (s +1)
2
+2
2
, por lo tanto su desarrollo en fracciones parciales queda de la
forma:
7s
2
+ 23s + 30
(s 2)(s
2
+ 2s + 5)
=
A
(s 2)
+
B(s + 1) + 2C
(s + 1)
2
+ 4
(6.4)
Al multiplicar ambos lados por el com un denominador, obtenemos:
7s
2
+ 23s + 30 = A(s
2
+ 2s + 5) + B(s + 1)(s 2) + 2C(s 2) (6.5)
en la ecuaci on (6.5) hacemos s = 2, s = 1 y s = 0, en el primer caso,
200 CAP
ITULO 6. TRANSFORMADA DE LAPLACE
28 + 46 + 30 =A(4 + 4 + 5)
104 =A13
A =8
con s = 1 y A = 8 sustituyendo en (6.5) tenemos:
7 23 + 30 =8(1 2 + 5) + 2C(3)
14 =32 6C
C =3
y por ultimo si s = 0, C = 3 y sustituyendo en (6.5) tenemos:
30 =40 + B(2) + 6(2)
30 =40 12 2B
B =1
como B = 1, C = 3 y A = 8, sustituyendo en (6.4) se tiene:
7s
2
+ 23s + 30
(s 2)(s
2
+ 2s + 5)
=
8
(s 2)
+
1(s + 1) + 6
(s + 1)
2
+ 4
con esto podemos hallar la transformada inversa:
L
1
(
7s
2
+ 23s + 30
(s 2)(s
2
+ 2s + 5)
) =
=L
1
_
8
(s 2)
_
+L
1
_
1(s + 1)
(s + 1)
2
+ 4
_
+L
1
_
6
(s + 1)
2
+ 4
_
=8L
1
_
1
(s 2)
_
1L
1
_
(s + 1)
(s + 1)
2
+ 4
_
+ 3L
1
_
2
(s + 1)
2
+ 4
_
=8e
2t
e
t
cos(2t) + 3e
t
sin(2t)
Ejemplo 6.36. Hallar la transformada inversa de
F(s) =
1
(s 3)(s
2
+ 2s + 2)
.
6.2. TRANSFORMADA INVERSA DE LAPLACE 201
Solucion. Primero hallamos la descomposicion en fracciones parciales de F(s). Observa-
mos que el factor cuadr atico s
2
+2s+2 tiene una raz imaginaria, con su correspondiente
conjugada, que es 1 1i de donde podemos expresar este factor cuadr atico como:
s
2
+2s +2 = (s +1)
2
+1
2
, por lo tanto su desarrollo en fracciones parciales queda de la
forma:
1
(s 3)(s
2
+ 2s + 2)
=
A
(s 3)
+
B(s + 1) + C
(s + 1)
2
+ 1
. (6.6)
Al multiplicar ambos lados por el com un denominador, obtenemos:
1 = A(s
2
+ 2s + 2) + B(s + 1)(s 3) + C(s 3) (6.7)
en la ecuaci on (6.7) hacemos s = 3, s = 1 y s = 0, en el primer caso,
1 =A(9 + 6 + 2)
1 =A17
A =
1
17
con s = 1 y A =
1
17
, sustituyendo en (6.7) tenemos:
1 =
1
17
(1 2 + 2) +C(4)
1 =
1
17
4C
C =
4
17
y por ultimo si s = 0, C =
4
17
y A =
1
17
sustituyendo en (6.7) tenemos:
1 =
1
17
(2) + B(3)
4
17
(3)
1 =
1
17
4C
1 =
2
17
3B +
12
17
B =
1
17
202 CAP
ITULO 6. TRANSFORMADA DE LAPLACE
como B =
1
17
, C =
4
17
y A =
1
17
, sustituyendo en (6.6) se tiene:
1
(s 3)(s
2
+ 2s + 2)
=
1/17
(s 3)
+
1/17(s + 1) 4/17C
(s + 1)
2
+ 1
con esto podemos hallar la transformada inversa:
L
1
(
1
(s 3)(s
2
+ 2s + 2)
) =
=L
1
_
1
17(s 3)
_
+L
1
_
1(s + 1)
17
_
(s + 1)
2
+ 1
_
+L
1
_
4
17
_
(s + 1)
2
+ 4
_
=
1
17
L
1
_
1
(s 3)
_
1
17
L
1
_
(s + 1)
_
(s + 1)
2
+ 1
4
17
L
1
_
1
_
(s + 1)
2
+ 1
_
=
1
17
e
3t
1
17
e
t
cos(t)
4
17
e
t
sin(t)
Ejemplo 6.37. Vericar que si L(t
n
f(t)) = (1)
n d
n
F
ds
n
(s) su transformada inversa es:
L
1
_
d
n
F
ds
n
(s)
_
= (1)
n
t
n
f(t) (6.8)
donde f(t) = L
1
(F), usar esta ecuaci on para calcular la transformada inversa de:
F(s) = ln
_
s + 2
s 5
_
.
Solucion: Utilizando la ecuaci on (6.8), primero tenemos que derivar F(s) = ln
_
s+2
s5
_
, por
lo tanto tenemos:
dF
ds
=
7
(s + 2)(s 5)
(6.9)
como derivamos la primera vez el n en la ecuacion (6.8) es 1, por lo tanto sustituyendo
en la ecuaci on (6.8) tenemos:
L
1
_
dF
ds
_
=(t)f(t)
L
1
_
7
(s + 2)(s 5)
_
=(t)f(t)
6.3. APLICACIONES DE LA TRANSFORMADA DE LAPLACE 203
ahora hallamos la transformada inversa de (6.9), la cual la realizamos por fracciones
parciales, por lo tanto su desarrollo en fracciones parciales queda de la forma:
7
(s + 2)(s 5)
=
A
(s + 2)
+
B
(s 5)
. (6.10)
Al multiplicar ambos lados por el com un denominador, obtenemos:
7 = A(s 5) + B(s + 2) (6.11)
en la ecuacion (6.11) hacemos s = 5, en el primer caso, 7 = 7B y resulta B = 1. En
la ecuaci on (5.11) hacemos s = 2, en el primer caso, A = 1. Sustituyendo en (5.10) nos
queda:
7
(s + 2)(s 5)
=
1
(s + 2)
1
(s 5)
con lo cual podemos hallar la transformada inversa:
L
1
_
1
(s + 2)
1
(s 5)
_
=(t)f(t)
L
1
_
1
(s + 2)
_
L
1
_
1
(s 5)
_
=(t)f(t)
e
2t
e
5t
=(t)f(t)
despejando f(t) tenemos,
e
5t
t
e
2t
t
= f(t) y como f(t) = L
1
(F) entonces :
L
1
_
ln
_
s + 2
s 5
__
=
e
5t
t
e
2t
t
.
Nota. El lector habr a notado que nuestro interes siempre estuvo en fracciones propias.
Esto se justica por lo siguiente. Si F fuera una fracci on propia, lm
s
F(s) = 0, luego
F no sera la transformada de Laplace de ninguna funci on de orden exponencial (que son
las de nuestro interes).
6.3. Aplicaciones de la transformada de laplace
Aplicaremos la transformada de laplace para resolver ecuaciones y sistemas de ecua-
ciones diferenciales lineales con valores iniciales. Una de las ventajas es que se aborda
204 CAP
ITULO 6. TRANSFORMADA DE LAPLACE
directamente el problema de condicion inicial en el origen, resolviendo sin necesidad de
calcular la solucion general de la ecuaci on o el sistema. Otras ventajas es que puede facili-
tar la soluci on de ecuaciones con integrales. Aqu es donde podemos apreciar el verdadero
sentido de lo que se ha hecho hasta ahora. Se tomar a un problema analtico: resolver una
ecuaci on diferencial especial y convertirlo en uno algebraico, aplicando la transformada
de Laplace, lo resolvemos algebraicamente y por la transformada inversa queda resuelto
analticamente.
6.3.1. Soluci on de problemas con Valores Iniciales
Para resolver un problema con valor inicial, se siguen los siguientes pasos:
a) Suponiendo que las funciones cumplen las hip otesis de existencia de la transforma-
da, se considera la transformada de Laplace a ambos lados de la ecuaci on.
b) Use las propiedades de la transformada de laplace y las condiciones iniciales para
obtener una ecuaci on para la transformada de la solucion luego despeje la transfor-
mada.
c) Determine la transformada inversa de laplace de la solucion.
Ejemplo 6.38. Resolver el problema con valor inicial:
y
7y
+ 10y = 9 cos(t) + 7 sin(t); y(0) = 5, y
(0) = 4.
Solucion: Aplicamos la transformada de Laplace a ambos lados de la ecuacion, aplicamos
la propiedad de linealidad, y las propiedades de la transformada, tenemos:
L(y
7y
+ 10y) =L
_
9 cos(t) + 7 sin(t)
_
L(y
) 7L(y
) + 10L(y) =9L(cos(t)) + 7L
_
sin(t)
_
s
2
L(y) sy(0) y
(0) 7[sL(y) y(0)] + 10L(y) =9
s
s
2
+ 1
+ 7
1
s
2
+ 1
reemplazando las condiciones iniciales obtenemos:
s
2
L(y) s5 + 4 7[sL(y) 5] + 10L(y) = 9
s
s
2
+ 1
+ 7
1
s
2
+ 1
(6.12)
6.3. APLICACIONES DE LA TRANSFORMADA DE LAPLACE 205
despejando L(y) en (6.12) tenemos:
L(s
2
7s + 10) =
9s
s
2
+ 1
+
7
s
2
+ 1
+ 5s 39
L(y) =
9s + 7 + 5s
3
+ 5s 39s
2
39
(s
2
+ 1)(s
2
7s + 10)
L(y) =
5s
3
39s
2
+ 14s 32
(s
2
+ 1)(s
2
7s + 10)
(6.13)
ahora hallamos la transformada inversa de (6.13):
y = L
1
_
5s
3
39s
2
+ 14s 32
(s
2
+ 1)(s
2
7s + 10)
_
para ello primero descomponemos en fracciones parciales, por lo tanto su desarrollo en
fracciones parciales queda de la forma:
5s
3
39s
2
+ 14s 32
(s
2
+ 1)(s
2
7s + 10)
=
5s
3
39s
2
+ 14s 32
(s
2
+ 1)(s 5)(s 2)
5s
3
39s
2
+ 14s 32
(s
2
+ 1)(s
2
7s + 10)
=
As + B
s
2
+ 1
+
C
s 5
+
D
s 2
. (6.14)
Al multiplicar ambos lados por el com un denominador, obtenemos:
5s
3
39s
2
+14s 32 = (As +B)(s 5)(s 2)C(s
2
+1)(s 2) +D(s
2
+1)(s 5) (6.15)
en la ecuaci on (6.15) hacemos s = 2, en el primer caso,
40 + 156 + 28 32 =D5(3)
D =8
con s = 5 y D = 8 sustituyendo en (6.15) tenemos:
625 975 + 70 32 =78C
C =4
206 CAP
ITULO 6. TRANSFORMADA DE LAPLACE
si s = 0, C = 4 y D = 8 sustituyendo en (6.15) tenemos:
32 =10B + 8 40
B =0
y por ultimo si s = 1, B = 0, C = 4 y D = 8 sustituyendo en (6.15) tenemos:
52 =4A + 8 64
A =1
como B = 0, C = 4, D = 8 y A = 1, sustituyendo en (6.14) se tiene:
5s
3
39s
2
+ 14s 32
(s
2
+ 1)(s
2
7s + 10)
=
s
s
2
+ 1
+
4
s 5
+
8
s 2
con esto podemos hallar la transformada inversa:
L
1
_
s
s
2
+ 1
+
4
s 5
+
8
s 2
_
=
=L
1
_
s
s
2
+ 1
_
+L
1
_
4
s 5
_
+L
1
_
8
s 2
_
=L
1
_
s
s
2
+ 1
_
4L
1
_
1
s 5
_
+ 8L
1
_
1
s 2
_
=cos(t) 4e
5t
+ 8e
2t
es decir y(t) = cos(t) 4e
5t
+ 8e
2t
.
6.3.2. Solucion de Sistemas de Ecuaciones con Valores Iniciales
Para solucionar el metodo es:
a) Se aplica la transformada a cada una de las ecuaciones.
b) Se usan las propiedades de la transformada de Laplace, y las condiciones iniciales.
c) Se crea un sistema de ecuaciones.
6.3. APLICACIONES DE LA TRANSFORMADA DE LAPLACE 207
d) Se resuelve el sistema. metodo.
Ejemplo 6.39. Solucionar el sistema:
_
x
= y + sin(t) x(0) = 2
y
= x + 2 cos(t) y(0) = 0.
Solucion: Al calcular la transformada de Laplace a las dos ecuaciones tenemos:
_
L(x
) = L(y) +L
_
sin(t)
_
L(y
) = L(x) + 2L
_
cos(t)
_
.
(6.16)
Reemplazando las propiedades de la transformada de Laplace en (6.16) obtenemos:
_
sL(x) x(0) = L(y) +
1
s
2
+1
sL(y) y(0) = L(x) +
2s
s
2
+1
(6.17)
reemplazando las condiciones iniciales en (6.17) obtenemos:
_
sL(x) L(y) =
1
s
2
+1
+ 2
sL(y) L(x) =
2s
s
2
+1
(6.18)
el sistema de ecuaciones (6.18) lo podemos resolver por eliminaci on, multiplicando la
primera ecuaci on por s y sum andosela a la segunda ecuaci on, por lo tanto obtenemos:
s
2
L(x) sL(y) =
s
s
2
+ 1
+ 2s
L(x) + sL(y) =
2s
s
2
+ 1
s
2
L(x) L(x) =
3s
s
2
+ 1
+ 2s
esto se simplica como:
L(x) =
3s + 2s
3
+ 2s
(s
2
+ 1)(s
2
1)
calculamos la transformada inversa, para ello primero lo escribimos en la forma de frac-
ciones parciales
208 CAP
ITULO 6. TRANSFORMADA DE LAPLACE
L(x) =
3/2s
s
2
+ 1
+
7/4
s 1
+
7/4
s + 1
x(t) =
3
2
cos(t) +
7
4
e
t
+
7
4
e
t
(6.19)
para hallar y(t) la despejamos en la primera ecuaci on del sistema (5.16) en terminos de
x(t):
y(t) = x
(t) sin(t)
sustituyendo x(t) en la ecuaci on inicial para obtener:
y(t) =
1
2
sin(t) +
7
4
e
t
7
4
e
t
.
La solucion del sistema consta de la pareja de funciones x(t), y(t).
6.4. Transformada de Funciones Discontinuas y Pe-
ri odicas
Denici on 6.40. Funcion escalon unitaria: Se dene la funci on escal on como:
U(t) =
_
0 si t < 0
1 si t 0,
U(t a) =
_
0 si t < a
1 si t a.
Transformada de la funcion escal on unitaria
L
_
U(t a)
_
=
_
0
U(t a)e
st
dt = lm
N
e
st
s
N
a
= lm
N
e
sN
s
e
sa
s
=
e
sa
s
, si s > 0.
6.4. TRANSFORMADA DE FUNCIONES DISCONTINUAS Y PERI
ODICAS 209
Figura 6.1:
Propiedades:
Sea f(t) una funci on y su transformada L
_
f(t)
_
:
L
_
f(t)
_
= F(s) =
_
0
f(t)e
st
dt
multiplicamos la transformada L
_
f(t)
_
por e
at
:
e
at
L
_
f(t)
_
=F(s) = e
as
_
0
f(t)e
st
dt
=
_
0
f(t)e
s(a+t)
dt
si realizamos un cambio de variable x = a + t t = x a, dx = dt por lo tanto:
e
at
L
_
f(t)
_
=F(s) = e
as
_
0
f(t)e
st
dt
e
at
L
_
f(x a)
_
=
_
0
f(x a)e
s(x)
dx
=
_
a
0
0f(x a)e
s(x)
dx +
_
a
1f(x a)e
s(x)
dx
=
_
0
U(x a)f(x a)e
s(x)
dx = L
_
U(x a)f(x a)
_
.
210 CAP
ITULO 6. TRANSFORMADA DE LAPLACE
es decir:
L
_
U(t a)f(t a)
_
=e
as
L
_
f(t)
_
. (6.20)
L
1
_
e
as
L
_
f(t)
__
=U(t a)f(t a). (6.21)
L
_
g(t)U(t a)
(s) =e
as
L
_
g(t + a)
(s). (6.22)
L
1
_
e
as
L
_
g(t + a)
(s)
_
=L
1
_
e
as
F(s)
= g(t)U(t a). (6.23)
Ejemplo 6.41. Expresar la funcion dada mediante funciones escal on unitario y calcule
su transformada.
a)
g(t) =
_
_
0, 0 < t < 1
2, 1 < t < 2
1, 2 < t < 3
3, t > 3.
b)
Solucion: a) La gr aca de la funci on g(t) es:
6.4. TRANSFORMADA DE FUNCIONES DISCONTINUAS Y PERI
ODICAS 211
Para expresar una funcion utilizamos la propiedad que: si f(t) =
_
p si a < t < b, enton-
ces la funcion f(t) la podemos expresar en terminos de una escal on unitaria utilizando
la expresion f(t) = p
_
U(t a) U(t b)
por lo tanto
g(t) = 0
_
U(t)U(t 1)
+2
_
U(t 1)U(t 2)
+1
_
U(t 2)U(t 3)
+3 U(t 3).
Es decir g(t) = 2U(t 1) U(t 2) + 2U(t 3).
Para hallar la transformada de laplace, la calculamos en cada uno de los terminos, por
ser una transformacion lineal es decir:
L
_
2U(t 1) U(t 2) + 2U(t 3)
=2L
_
U(t 1)
L
_
U(t 2)
+ 2L
_
U(t 3)
=2
e
s
s
e
2s
s
+ 2
e
3s
s
, para s > 0.
b) La graca de la funci on que se representa por es:
g(t) =
_
_
0, t < 1
t 1, 1 < t < 2
t + 3, 2 < t < 3
0, t > 3.
g(t) = (t 1)
_
U(t 1) U(t 2)
+ (t + 3)
_
U(t 2) (t 3)
U(t 3).
212 CAP
ITULO 6. TRANSFORMADA DE LAPLACE
Es decir: g(t) = (t 1)U(t 1) 2(t 2)U(t 2) + (t 3)U(t 3).
Para hallar la transformada de Laplace, la calculamos en cada uno de los terminos, por
ser una transformacion lineal es decir:
L
_
(t 1)U(t 1) 2(t 2)U(t 2) + (t 3)U(t 3)
= L
_
(t 1)U(t 1)
2L
_
(t 2)U(t 2)
+L
_
(t 3)U(t 3)
,
para aplicar la ecuacion (6.22), hacemos g(t) = t 1 y a = 1 en la primera transformada;
entonces
g(t + a) = g(t 1 + 1) = t
la transformada de laplace de g(t) es:
L
_
g(t)
_
=
1
s
2
,
por la f ormula (6.22) tenemos
L
_
(t 1)U(t 1)
(s) = e
1s
1
s
2
en la segunda hacemos g(t) = t 2 y a = 2; entonces
g(t + a) = g(t 2 + 2) = t
la transformada de Laplace de g(t + a) es:
L
_
g(t)
_
=
1
s
2
por la f ormula (6.22) tenemos
L
_
(t 2)U(t 2)
(s) = e
2s
1
s
2
en la tercera hacemos g(t) = t 3 y a = 3; entonces
g(t + a) = g(t 3 + 3) = t
6.4. TRANSFORMADA DE FUNCIONES DISCONTINUAS Y PERI
ODICAS 213
la transformada de Laplace de g(t) es:
L
_
g(t + a)
_
= L(t) =
1
s
2
por la f ormula (6.22) tenemos
L
_
(t 3)U(t 3)
(s) = e
3s
1
s
2
nalmente podemos decir que la transformada es:
L
_
(t 1)U(t 1)
2L
_
(t 2)U(t 2)
+L
_
(t 3)U(t 3)
=
(e
1s
2e
2s
+ e
3s
)
_
1
s
2
_
.
Ejemplo 6.42. Determine la transformada inversa de:
a)
se
3s
s
2
+4s+5
.
b)
e
3s
(s5)
(s+1)(s+2)
.
Solucion: a) para utilizar la ecuacion (6.21) primero expresamos
se
3s
s
2
+ 4s + 5
como el producto e
as
F(s). Para esto hacemos e
as
= e
3s
y
F(s) =
s
s
2
+ 4s + 5
.
As, a = 3 y
f(t) = L
1
_
s
s
2
+ 4s + 5
_
= e
2t
cos(t) 2e
2t
sin(t).
Por lo tanto tenemos que :
L
1
_
se
3s
s
2
+ 4s + 5
_
=f(t 3)U(t 3)
=U(t 3)
_
e
2(t3)
cos(t 3) 2e
2(t3)
s(t 3)
.
214 CAP
ITULO 6. TRANSFORMADA DE LAPLACE
b) para utilizar la ecuacion (6.21) primero expresamos
e
3s
(s 5)
(s + 1)(s + 2)
como el producto e
as
F(s). Para esto hacemos e
as
= e
3s
y
F(s) =
(s 5)
(s + 1)(s + 2)
.
As, a = 3 y
f(t) = L
1
_
(s 5)
(s + 1)(s + 2)
_
= 6e
t
+ 7e
2t
.
Por lo tanto tenemos que :
L
1
_
(s 5)
(s + 1)(s + 2)
_
=f(t 3)U(t 3)
=U(t 3)
_
6e
t+3
+ 7e
2t+6
.
Denici on 6.43. Funcion Periodica: Una funcion f(t) es peri odica con periodo
T si
Una funci on f(t) es periodica con periodo T si f(t + T) = f(t) para todo t en el
dominio de f.
Transformada de una funcion peri odica:
Si f tiene periodo T y es continua por partes en [0, T], entonces.
L{f}(s) =
F
T
(s)
1 e
sT
=
_
T
0
e
st
f(t)dt
1 e
sT
.
Ejemplo 6.44. a) Determine la transformada de la gr aca:
6.4. TRANSFORMADA DE FUNCIONES DISCONTINUAS Y PERI
ODICAS 215
b) Resuelva el problema con valores iniciales mediante la transformada de Laplace
y
+ y = t (t 4)U(t 2); y(0) = 0, y
(0) = 1.
Solucion: a) Primero escribimos la funcion que representa la gr aca:
f(t) =
_
1
a
t
, 0 < t < a
1
a
t+2
, a < t < 2a
donde f(t) tiene periodo T = 2a, por lo tanto
L =
_
a
0
1
a
te
st
dt +
_
2a
a
_
1
a
te
+
2
_
dt
1 e
s2a
=
_
1 e
2as
_
2
as
2
_
1 e
2as
_ =
_
1 e
as
_
as
2
_
1 + e
as
_.
b) Considerar la transformada de Laplace a ambos lados de y
+y = t(t4)U(t2),
obtenemos:
L(y
) +L(y) =L(t) L[(t 4)U(t 2)]
s
2
L(y) sy(0) y
(0) +L(y) =
1
s
2
L[(t 4)U(t 2)] (6.24)
primero hallamos L[(t 4)U(t 2)], para ello utilizamos la ecuaci on (6.21) donde:
216 CAP
ITULO 6. TRANSFORMADA DE LAPLACE
g(t) =t 4, a = 2
g(t + 2) =t 2
L[g(t + 2)] =[t 2] = L(t) 2L(1) =
1
s
2
2
s
por lo tanto L[(t 4)U(t 2)] = e
2s
_
1
s
2
2
s
_
.
En la ecuaci on (6.24) reemplazamos las condiciones iniciales y L[(t 4)U(t 2)],
tenemos:
s
2
L(y) 1 +L(y) =
1
s
2
e
2s
_
1
s
2
2
s
_
L(y)(s
2
+ 1) =
1
s
2
+ 1 e
2s
_
1
s
2
2
s
_
L
1
_
1
s
2
e
2s
_
1
s
2
2
s
__
y = t + [4 t 2 cos(t 2) + sin(t 2)]U(t 2).
6.5. La funcion Delta de Dirac
En circuitos electricos, sistemas mecanicos y otras aplicaciones que est an sometidos a
unas fuerzas de gran magnitud, que solamente act ua durante un intervalo de tiempo
muy corto. Tales fuerzas son una tension electrica en el caso de un circuito electrico, una
descarga electrica, el golpe de un martillo, el golpe a una pelota de tenis, etc. La funcion
impulso unitario puede servir como un modelo para tales fuerzas.
Denici on 6.45. Impulso Unitario
La funcion
: [0, ) dada por:
=
_
_
0, si 0 t t
0
1
2
, si t
0
< t t
0
+
0, si t > t
0
+
6.5. LA FUNCI
ON DELTA DE DIRAC 217
con > 0 y t
0
> 0.
La funcion impulso unitario satisface la siguiente:
_
0
(t t
0
)dt = 1.
Denici on 6.46. Funcion Delta Dirac
lm
0
(t t
0
) = (t t
0
)
Propiedades de la funci on Delta Dirac:
(1.)
(t t
0
)
_
, si t = t
0
0, si t = t
0
.
(2.)
_
(t t
0
)dt = 1.
Transformada de la Funcion delta Dirac
Para t
0
> 0, L
_
s(t t
0
)
= e
st
0
.
Ejemplo 6.47. Resolver el problema de valor inicial:
a) y
+ 3y
+ 2y = (t), y(0) = 0, y
(0) = 0.
b) y
+ 2y
+ y = (t ), y(0) = 1, y
(0) = 0.
Solucion. a) Aplicamos la transformada de Laplace a ambos lados de la ecuaci on, uti-
lizando la propiedad de linealidad, y las propiedades de la transformada, tenemos:
L
_
y
+ 3y
+ 2y
_
= L
_
(t)
_
L
_
y
_
+L
_
3y
_
+L
_
2y
_
= L
_
(t)
_
s
2
L(y) sy(0) y
(0) + 3
_
sL(y) y(0)
+ 2L(y) = 1
reemplazando las condiciones iniciales obtenemos:
s
2
L(y) + 3
_
sL(y)
+ 2L(y) = 1.
218 CAP
ITULO 6. TRANSFORMADA DE LAPLACE
Despejando L(y) obtenemos
L(y)
_
s
2
+ 3s + 2
_
= 1
L(y) =
1
s
2
+ 3s + 2
.
Hallando la transformada inversa tenemos:
y =L
1
_
1
s
2
+ 3s + 2
_
= L
1
_
1
(s + 2)(s + 1)
_
y =L
1
_
1
s + 2
_
+L
1
_
1
s + 1
_
= e
2t
+ e
t
.
b) Aplicamos la transformada de Laplace a ambos lados de la ecuaci on, utilizando la
propiedad de linealidad, y las propiedades de la transformada, tenemos:
L
_
y
+ 2y
+ y
_
= L
_
(t )
_
L
_
y
_
+ 2L
_
y
_
+L
_
y
_
= L
_
(t )
_
s
2
L(y) sy(0) y
(0) + 2
_
sL(y) y(0)
+L(y) = e
s
reemplazando las condiciones iniciales obtenemos:
s
2
L(y) s + 2
_
sL(y) 1
+L(y) = e
s
.
Despejando L(y) obtenemos
L(y)
_
s
2
+ 2s + 1
_
= e
s
+ s + 2
L(y) =
e
s
+ s + 2
s
2
+ 2s + 1
.
Hallando la transformada inversa tenemos:
y = L
1
_
e
s
s
2
+ 2s + 1
_
. .
1
+L
1
_
s
s
2
+ 2s + 1
_
. .
2
+2 L
1
_
1
s
2
+ 2s + 1
_
. .
3
6.6. CONVOLUCI
ON 219
Para resolver el termino 1 utilizamos la ecuaci on (6.21) primero expresamos
e
s
s
2
+2s+1
como el producto e
as
F(s). Para esto hacemos e
as
= e
s
y F(s) =
1
(s+1)
2
. As a =
y f(t) = L
1
_
1
(s+1)
2
_
= e
t
t. Por lo tanto tenemos que:
L
1
_
e
s
s
2
+ 2s + 1
_
=f(t )U(t )
=U(t )
_
e
(t)
(t )
.
Utilizando fracciones parciales para el segundo y tercer termino tenemos.
y =U(t )
_
e
(t)
(t )
+L
1
_
s
s
2
+ 2s + 1
_
+ 2L
1
_
1
s
2
+ 2s + 1
_
y =U(t )
_
e
(t)
(t )
+L
1
_
1
s + 1
_
L
1
_
1
(s + 1)
2
_
+ 2L
1
_
1
(s + 1)
2
_
y =U(t )
_
e
(t)
(t )
+ e
t
e
t
t + 2e
t
t
y =U(t )
_
e
(t)
(t )
+ e
t
+ e
t
.
6.6. Convolucion
Denici on 6.48. Sean f(t) y g(t) funciones continuas por partes en [0, ]. La Convo-
luci on de f(t) y g(t), que se denota f g se dene como
f g =
_
t
0
f(t v)g(v)dv
Propiedades de la Convoluci on de las funciones:
1. f g = g f.
2. f (g + h) = (f g) + (f h).
3. (f g) h = f (g h).
4. f 0 = 0
220 CAP
ITULO 6. TRANSFORMADA DE LAPLACE
Teorema 6.49 (Teorema de Convoluci on). Sean f(t) y g(t) funciones continuas por
partes en [0, ) y de orden exponencial a. Sea F(s) = L{f}(s) y G(s) = L{g}(s)
Entonces
L{f g}(s) =F(s)G(s) (6.25)
o equivalente L
1
{F(s)G(s)}(t) =(f g)(t) (6.26)
Ejemplo 6.50. Resolver la ecuacion integro diferencial:
y
(t) + y(t)
_
t
0
y(v) sin(t v)dv = sin(t), y(0) = 1.
Solucion: Para escribir la ecuaci on de otra manera primero expresamos la integral en
terminos de convolucion es decir:
_
t
0
y(v) sin(t v)dv = y(t) sin(t)
de tal manera que la ecuacion la podemos escribir como:
y
(t) + y(t) y(t) sin t = sin(t)
ahora aplicamos transformada de Laplace a ambos lados y reemplazamos con cada una
de las f ormulas y con la ecuaci on (5.25) obteniendo:
L{y
(t)} +L{y(t)} L{y
(t) sin(t)} = L{sin(t)}
sL{y(t)} y(0) +L{y(t)} L{y(t)}L{sin(t)} = L{sin(t)}
sL{y(t)} 1 +L{y(t)} L{y(t)}
1
s
2
+ 1
=
1
s
2
+ 1
L{y(t)}
_
s + 1
1
s
2
+ 1
_
= 1
1
s
2
+ 1
L{y(t)} =
s
s
2
+ s + 1
=
s
s
2
+ s + 1/4 + 3/4
=
s
_
s + 1/2
_
2
+ 3/4
utilizando transformada inversa obtenemos:
6.7. EJERCICIOS 221
y(t) = L
1
_
s
_
s + 1/2
_
2
+ 3/4
_
y(t) = e
t/2
cos
_
t
3/2
_
3
3
e
t/2
sin
_
t
3/2
_
.
6.7. Ejercicios
1. Use la denici on de transformada para determinar la transformada de Laplace de
la funcion dada.
a) f(t) = e
t
sin(2t).
b) f(t) = te
3t
.
c) f(t) = [t]e
at
.
d)
f(t) =
_
0, 0 < t < 2
t, t > 2.
e)
f(t) =
_
sin(t), 0 < t <
0, t > .
f )
f(t) =
_
e
2t
, 0 < t < 3
1, t > 3.
g)
222 CAP
ITULO 6. TRANSFORMADA DE LAPLACE
2. Encuentre la transformada inversa de laplace.
a)
2s4
s
2
4s+13
.
b)
s
2
4s+3
(s
2
4s+5)
2
.
c)
s+5
s
2
+6s+18
.
d)
s+1
s
2
9
.
e)
s
3
+2s
2
s3
(s+1)
4
.
f )
3
s1
+
4s+1
s
2
+9
.
g)
7+(s+4)(183s)
(s3)(s1)(s+4)
.
h)
3s
2
+2s+1
(s
2
+1)(s
2
+2s+2)
.
i )
3s+2)
(s2)(s
2
+2s+5)
.
j )
s+1
(4s
2
+1)(s
2
+1)
.
k)
3s+2
(s
2
+4)(s
2
+9)
.
l )
2s1
(4s
2
+1)(9s
2
+1)
.
m)
17s15
(s
2
2s+5)(s
2
+2s+10)
.
n)
2s+1
(s
2
+1)(s1)(s3)
.
n)
e
s
s(s+1)
.
o)
e
2s
s
2
(s1)
.
p)
e
s/2
s
2
+4
.
3. Exprese cada funcion en terminos de la funci on escal on unitario. Halle la transfor-
mada de Laplace de la funcion respectiva.
a)
f(t) =
_
2, 0 t3
2, t 3.
b)
f(t) =
_
0, 0 t3/2
sin(t), t 3/2.
6.7. EJERCICIOS 223
c)
f(t) =
_
_
1, 0 t < 4
0, 4 t < 5
1, t 5.
d)
e)
4. Encuentre la transformada de laplace.
a) (t 1)u(t 1).
b) e
2t
u(t 2).
c) (3t + 1)u(t 1).
5. Use la transformada de Laplace para resolver el problema de valor inicial respectivo.
a) y
+ 6y = e
4t
, y(0) = 2.
b) y
+ 2y
+ y = 6 sin(t) 4 cos(t), y(0) = 1, y
(0) = 1.
c) y
+ y = sen2t, y(0) = 0, y
(0) = 1.
d) y
+ 3y
+ 2y = e
t
, y(0) = 0, y
(0) = 1.
e) y
+ 4y = 8 sin(2t) + 9 cos(t), y(0) = 1, y
(0) = 0.
224 CAP
ITULO 6. TRANSFORMADA DE LAPLACE
f ) y
5y
+ 6y = 10e
t
cos(t), y(0) = 2, y
(0) = 1.
g) y
+ 4y
+ 13y = 10e
t
36e
t
, y(0) = 0, y
(0) = 16.
h) y
+ 4y = g(t), y(0) = 1, y
(0) = 0, donde
g(t) =
_
t, t < 2
5, t > 2.
i ) y
+ y
y = 0, y(0) = 1, y
(0) = 1, y
(0) = 3.
j ) y
+ y
+ 3y
5y = 16e
t
, y(0) = 0, y
(0) = 2, y
(0) = 1.
k) y
+ 3ty
6y = 1, y(0) = 0, y
(0) = 0.
l ) ty
ty
+ y = 2, y(0) = 2, y
(0) = 1.
m) y
+ ty
6y = 0, y(0) = 0, y
(0) = 3.
n) y
+ 4y = sin(t)u(t 2), y(0) = 1, y
(0) = 0.
n) y
+ 4y = f(t), y(0) = 0, y
(0) = 1, donde:
f(t) =
_
1, 0 t < 1
0, t 1.
o) y
+ y = f(t), y(0) = 0, y
(0) = 1, donde:
f(t) =
_
_
0, 0 t <
1, t < 2
0, t 2.
p) y
+ t4y
+ 3y = 1 u(t 2) u(t 4) + u(t 6), y(0) = 0, y
(0) = 1.
6. Sea L
1
_
d
n
F
ds
n
_
(t) = (t)
n
f(t) donde f(t) = L
1
(F). Use esta ecuacion para cal-
cular L
1
(F).
a) F(s) = ln
_
s+2
s5
_
.
b) F(s) = ln
_
s4
s3
_
.
c) F(s) = ln
_
s
2
+29
s
2
+1
_
.
6.7. EJERCICIOS 225
d) F(s) = arctan
_
1
s
_
.
7. Use L
_
t
n
f(t)
_
= (1)
n d
n
F
ds
n
(s) para mostrar que:
a) L
_
t
2
y
(t)
_
(s) = sY
(s) + 2Y
(s), donde Y (s) = L
_
y
_
(s).
b) L
_
t
2
y
(t)
_
(s) = s
2
Y
(s) + 24sY
(s) + 2Y (s), donde Y (s) = L
_
y
_
(s).
8. Determinar L{f}, donde la funci on peri odica queda descrita mediante su graca.
a)
226 CAP
ITULO 6. TRANSFORMADA DE LAPLACE
Captulo 7
Soluci on de Ecuaciones Diferenciales
Mediante Series
7.1. Series de Potencias
Denici on 7.1. Una serie de potencias en x a es una serie innita de la forma:
c
0
+ c
1
(x a) + c
2
(x a)
2
+ =
n=0
c
n
(x a)
n
Adem as decimos que esta centrada en a.
Denici on 7.2. Convergencia: Una serie de potencias
n=0
c
n
(x a)
n
es convergente
en un valor determinado si su sucesion de sumas parciales converge, es decir si existe
lm
N
S
N
(x) = lm
N
n=0
c
n
(x a)
n
.
Si el limite no existe se dice que la serie diverge.
Denici on 7.3. Intervalo de Convergencia: Toda serie de potencias tiene un intervalo
de convergencia. El intervalo de convergencia es conjunto de los n umeros reales x para
los cuales la serie converge.
Denici on 7.4. Radio de Convergencia: Si R > 0, una serie de potencias
n=0
c
n
(xa)
n
converge para |xa| < R y diverge para |xa| > R. Si la serie s olo converge en su centro
a, entonces R = 0. Si converge para todo x, se escribe R = . Sabemos que |x a| < R
equivale a a R < x < a + R.
227
228CAP
ITULO7. SOLUCI
ONDE ECUACIONES DIFERENCIALES MEDIANTE SERIES
7.1.0.1. Una serie de potencias dene una funcion:
Sea la funci on f(x) =
n=0
c
n
(xa)
n
cuyo dominio es el intervalo de convergencia de
la serie. Si el radio de convergencia es R > 0, f es continua diferenciable e integrable en
el intervalo (a R, a +R). Adem as, f
(x) y
_
f(x) se pueden determinar por derivacion
e integraci on termino a termino. Vemos que:
y
(x) =
n=1
c
n
nx
n1
, y
(x) =
n=2
c
n
n(n 1)x
n2
.
Denici on 7.5. Funcion Analtica: Una funci on f es analtica en un punto a si se puede
expresar como una serie de potencias en x a con un radio de convergencia positivo o
innito. De c alculo sabemos que por series de Taylor podemos expresar algunas funciones
en terminos de series tales como:
e
x
= 1 +
x
1!
+
x
2
2!
+ . senx = x
x
3
3!
+
x
5
5!
, cos x = 1
x
2
2!
+
x
4
4!
x
6
6!
+
para |x| < . Estas series de Taylor centradas en 0 se llaman series de Maclaurin, y
demuestran que e
x
, senx, y cos x son analticas en x = 0.
7.2. Soluciones en Series de Potencias
Sea la ecuaci on diferencial de segundo orden homogenea:
a
2
(x)y
+ a
1
(x)y
(x) + a
0
(x)y = 0 (7.1)
la cual la podemos escribir de la forma:
y
+ P(x)y
(x) + Q(x)y = 0 (7.2)
Denici on 7.6. Se dice que un punto x
0
es punto ordinario de la ecuaci on (6.) si tanto
P(x) como Q(x) tomados en (6.22), son analticos en x
0
. Se dice que un punto que no es
ordinario es punto singular de la ecuacion.
7.2. SOLUCIONES EN SERIES DE POTENCIAS 229
Teorema 7.7. Existencia de Soluciones Con Series de Potencias
Si x = x
0
es un punto ordinario de la ecuacion (6.1), siempre podemos determinar
dos soluciones linealmente independientes en forma de una serie de potencias centrada
en x
0
; esto es, y =
n=0
c
n
(x x
0
)
n
. Una solucion en serie converge al menos en un
intervalo por |x x
0
| < R, donde R es la distancia de x
0
al punto singular mas cercano.
Ejemplo 7.8. Determinar dos soluciones en forma de serie de potencias, de la ecuaci on
diferencial, respecto al punto ordinario x = 0.
a. y
2xy
+ y = 0
b. y
+ senxy = 0
Solucion: a. Como no hay puntos singulares nitos, el teorema garantiza dos solucio-
nes en series de potencias centradas en 0, convergentes para |x| < . Al sustituir
y =
n=0
c
n
x
n
, y
(x) =
n=1
c
n
nx
n1
, y y
(x) =
n=2
c
n
n(n 1)x
n2
, en la
ecuaci on diferencial, se obtiene
y
2xy
+ y =
n=2
c
n
n(n 1)x
n2
2x
n=1
c
n
nx
n1
+
n=0
c
n
x
n
= 0
y
2xy
+ y =
n=2
c
n
n(n 1)x
n2
2
n=1
c
n
nx
n
+
n=0
c
n
x
n
= 0
para sumar dos series, es necesario que ambos ndices de suma comiencen con el
mismo n umero y que las potencias de comiencen con la misma potencia, para lograr
esta hacemos lo siguiente; para la primera serie hacemos k = n2, para la segunda
k = n y para la tercera tomamos k = n, que son los exponentes de x por lo tanto
el lado derecho se convierte en:
k=0
(k + 2)(k + 1)c
k+2
x
k
. .
k=n2
2
k=1
c
k
kx
k
. .
k=n
+
k=0
c
k
x
k
. .
k=n
la primera serie comienza en 0 y la segunda en 1. Si se escribe el primer termino
de la primera serie fuera de la notaci on sigma, y lo mismo hacemos con la tercera
serie obtenemos:
230CAP
ITULO7. SOLUCI
ONDE ECUACIONES DIFERENCIALES MEDIANTE SERIES
2 1 c
2
+
k=1
(k + 2)(k + 1)c
k+2
x
k
2
k=1
c
k
kx
k
+ c
0
+
k=1
c
k
x
k
= 0
podemos expresar esto como:
2 1 c
2
+ c
0
+
k=1
_
(k + 2)(k + 1)c
k+2
2c
k
k + c
k
x
k
= 0 (7.3)
como la ecuaci on (6.3) es igual a cero es necesario que el coeciente de cada potencia
de x sea igual a cero, esto es, que 2c
2
+c
0
= 0 ( es el coeciente de x
0
), y tenemos:
c
2
=
c
0
2
para k = 1, c
3
=
c
1
3!
para k = 2, c
4
=
3c
2
43
, pero como conocemos c
2
sustituimos y obtenemos
c
4
=
3c
0
4!
para k = 3, c
5
=
5c
3
45
, pero como conocemos c
3
sustituimos y obtenemos
c
5
=
c
1
5!
para k = 4, c
6
=
7c
4
56
, pero como conocemos c
4
sustituimos y obtenemos
c
6
=
21c
0
6!
para k = 5, c
7
=
9c
5
67
, pero como conocemos c
5
sustituimos y obtenemos
c
7
=
45c
1
7!
Y as sucesivamente. Por tanto,
7.2. SOLUCIONES EN SERIES DE POTENCIAS 231
y =c
0
+ c
1
x
c
0
2!
x
2
+
c
1
3!
x
3
3c
0
4!
x
4
+
5c
1
5!
x
5
21c
0
6!
x
6
+
45c
1
7!
x
7
+
=c
0
_
1
x
2
2!
3x
4
4!
21x
6
6!
_
+ c
1
_
x +
x
3
3!
+
5x
5
5!
+
45x
7
7!
+
_
b. senx es una funci on analtica en el punto ordinario x = 0. Si usamos la serie de
Maclaurin para senx junto con y =
n=0
c
n
x
n
, y
(x) =
n=1
c
n
nx
n1
, y
(x) =
n=2
c
n
n(n 1)x
n2
y senx =
n=0
x
2n+1
(2n+1)!
(1),
n
, sustituyendo en la ecuaci on
diferencial, se obtiene
y
+ senxy = y
(x) =
=
n=2
c
n
n(n 1)x
n2
+
_
senx =
n=0
x
2n+1
(2n + 1)!
(1),
n
__
n=0
c
n
x
n
_
= 0
= c
2
2 + 6c
3
x + 12c
4
x
2
+ 20c
5
x
3
+ 30c
6
x
4
+ +
+
_
x
x
3
3!
+
x
5
5!
x
7
7!
+
_
_
c
0
+ c
1
x + c
2
x
2
+
_
= 0
= 2c
2
+ x(6c
3
+ c
0
) + x
2
(12c
4
+ c
1
) + x
3
_
20c
5
+ c
2
c
0
3!
_
+
+ x
4
_
30c
6
+ c
3
c
1
3!
_
+ = 0
Por consiguiente,
2c
2
= 0, 6c
3
+c
0
= 0, 20c
5
+c
2
+
c
0
3!
= 0, 30c
6
+c
3
+
c
1
3!
= 0 y as sucesivamente.
Esto da como resultado c
2
= 0, c
3
=
c
0
6
, c
4
=
c
1
12
, c
5
=
c
0
120
, . Al agrupar
terminos llegamos a la soluci on general
y =c
0
+ c
1
x
c
0
6
x
3
c
1
12
x
4
+
c
1
0
120
x
5
+
=c
0
_
1
x
3
6
+
x
5
120
+
_
+ c
1
_
x
x
4
12
+
_
Ejercicio 7.9. 1. Determine los puntos singulares de la ecuaci on diferencial dada.
232CAP
ITULO7. SOLUCI
ONDE ECUACIONES DIFERENCIALES MEDIANTE SERIES
a) (x + 1)y
x
2
y
+ 3y = 0
b) (x
2
+ x)y
+ 3y
6xy = 0
c) (senx)y
+ (cos x)y = 0
2. Determine al menos los primeros cuatro terminos no nulos en un desarrollo en serie
de potencias en torno de x = 0 para una soluci on general de la ecuacion diferencial
dada.
a) y
+ (x 1)y
+ y = 0
b) y
2y
+ y = 0
c) (2x 3)y
xy
+ y = 0
3. Determine un desarrollo en series de potencias en torno dex = 0 para una solu-
ci on general de la ecuacion diferencial dada. Su respuesta debe incluir una formula
general para los coecientes.
a) y
2xy = 0
b) y
xy
+ 4y = 0
c) y
x
2
y
xy = 0
d) (x
2
+ 1)y
xy
+ y = 0
4. Determine al menos los primeros cuatro terminos no nulos en un desarrollo en serie
de potencias en torno de x = 0 para una soluci on general de la ecuacion diferencial
dada.
a) y
+ (senx)y = 0; y(0) = 1
b) y
e
x
y = 0; y(0) = 1
c) (x
2
+ 1)y
e
x
y
+ y = 0; y(0) = 1, y
(0) = 1
d) y
xy = senx
e) y
2xy
+ 3y = x
2
f ) (1 + x
2
)y
xy
+ y = e
x
g) y
+ (senx)y = cos x
Luz Marina
Bibliografa
[1] Blanchard P., Devaney R. and Hall G. Ecuaciones Diferenciales. Thomson
[2] Lomen and Lovelock. Dierential equations. Wiley.
[3] Zill D. A rst course in dierential equations with modeling applications. Brooks and
Cole.
233
234 BIBLIOGRAF
IA
LIBROS Y AYUDAS ADICIONALES EN LA WEB.
1. http://www.math.niu.edu/
~
rusin/known-math/index/12FXX.html
2. http://www.maths.tcd.ie/%7Edwilkins/Courses/311/
3. http://www.math.niu.edu/
~
beachy/aaol/galois.html
4. http://www.sussex.ac.uk/Users/gavinw/Courses/GaloisTheory/
5. http://www.maths.gla.ac.uk/
~
ajb/dvi-ps/Galois.pdf
Indice alfabetico
Mec anica de Newton, 102
anulador
metodo, 152
ecuaci on diferencial
de primer orden, 81
aplicaciones
crecimiento de poblaciones, 84
ley de enfriamiento, 81
metodo del carbono 14, 85
mezclas, 95
campos de direcciones, 18
carbono 14, 86
coecientes indeterminados, 129
conjunto de soluciones, 121
fundamental, 121
dependencia lineal, 120
derivadas parciales, 46
ecuaci on diferencial
de Lagrange, 73
de Ricatti, 71
ecuaci on diferencial
con coecientes lineales, 64
de Bernoulli, 68
de Cauchy-Euler, 136
de orden n , 117
de orden superior, 117
de primer orden
exacta, 46
separable, 41
exacta
criterio para, 46
soluci on, 46
homogenea, 62
criterio, 63
lineal
con coecientes constantes, 117
de primer orden, 58
homogenea, 117
no homogenea, 117, 129
Euler
metodo de aproximaci on, 30
factor integrante, 53
metodos para hallar, 54
familia de curvas, 100
Gauss
metodo de eliminaci on, 172
independencia lineal, 121
is otopo radioactivo, 86, 93
Laguerre
ecuaci on, 149
ley de enfriamiento, 81
Newton I., 81
operador diferencial, 152, 172
plano fase, 155
curva en, 156
poblaci on, 92
235
236
INDICE ALFAB
ETICO
polinomio caracterstico, 126, 137
reduccion de orden
reducci on de orden, 123
regla de Cramer, 133
resorte, 174
Sch odinger
ecuaci on, 149
sistemas
acoplados masa-resorte, 174
de ecuaciones diferenciales, 155
metodo de eliminaci on, 172
Sistemas Lineales Homogeneos con Coe-
cientes Constantes, 167
soluci on
por sustituciones, 62
sudario de Turin, 93
tanques
interconectados, 174
trayectorias ortogonales, 100
variables separables
reducci on a, 75
variacion de parametros, 132
wronskiano, 120, 126, 133
Você também pode gostar
- Práctica Docente - Trabajo Práctico 1 - Gómez - Reales - Vázquez - Villagra PDFDocumento39 páginasPráctica Docente - Trabajo Práctico 1 - Gómez - Reales - Vázquez - Villagra PDFLucas VillagraAinda não há avaliações
- Limites en Varias VariablesDocumento6 páginasLimites en Varias VariablesBoris PenaylilloAinda não há avaliações
- Examen Final Química ING - V1Documento8 páginasExamen Final Química ING - V1The Kings Of HistoryAinda não há avaliações
- Capitulo 2 Funciones de Varias Variables Parte 1Documento10 páginasCapitulo 2 Funciones de Varias Variables Parte 1omaroso1Ainda não há avaliações
- Calculo IntDocumento27 páginasCalculo IntJose Manuel Arenas CruzAinda não há avaliações
- Práctica Docente - Trabajo Práctico 1 - Gómez - Reales - Vázquez - VillagraDocumento39 páginasPráctica Docente - Trabajo Práctico 1 - Gómez - Reales - Vázquez - VillagraLucas VillagraAinda não há avaliações
- EXA-2018-2S-QUÍMICA GENERAL-7-1Par PDFDocumento5 páginasEXA-2018-2S-QUÍMICA GENERAL-7-1Par PDFNicole Ponce AguiñoAinda não há avaliações
- Ecuaciones Diferenciales Unidad 4Documento28 páginasEcuaciones Diferenciales Unidad 4Jason Clemente0% (1)
- Amii 2015 Monllor PDFDocumento239 páginasAmii 2015 Monllor PDFGeraAinda não há avaliações
- AM II - Guía de Trabajos Practicos PDFDocumento45 páginasAM II - Guía de Trabajos Practicos PDFNahuel PassanoAinda não há avaliações
- Apuntes de Clase Calculo Varias Variables - Borrador 1Documento186 páginasApuntes de Clase Calculo Varias Variables - Borrador 1Celia MendietaAinda não há avaliações
- 1S-2016 Física PrimeraEvaluacion08H30 V1Documento8 páginas1S-2016 Física PrimeraEvaluacion08H30 V1Kevin Bryan AAinda não há avaliações
- ApuntesEDOProf LidiaOrtega PDFDocumento250 páginasApuntesEDOProf LidiaOrtega PDFantonio009gAinda não há avaliações
- Ecuaciones Diferenciales HomogéneasDocumento13 páginasEcuaciones Diferenciales Homogéneasaquarius123123123100% (1)
- Matemáticas Primero 11 Ene-5 FebDocumento6 páginasMatemáticas Primero 11 Ene-5 FebNORMA RANGELAinda não há avaliações
- Derivadas Parciales y Regla de La CadenaDocumento10 páginasDerivadas Parciales y Regla de La CadenaJmance_Ainda não há avaliações
- Cortes, Secciones y RoturasDocumento6 páginasCortes, Secciones y RoturasWilliam RodriguezAinda não há avaliações
- Ecuacion Cubica y CuarticaDocumento4 páginasEcuacion Cubica y CuarticaKevin Caceres RiosAinda não há avaliações
- Divergencia Rotacional y PropiedadesDocumento114 páginasDivergencia Rotacional y PropiedadesHenry PuquioAinda não há avaliações
- Trayectorias OrtogonalesDocumento5 páginasTrayectorias OrtogonalesJAngelRiosAinda não há avaliações
- Raíces de EcuacionesDocumento28 páginasRaíces de Ecuacionesdiegoferro90100% (1)
- Notas de Analisis Matematico Basico en Varias VariablesDocumento117 páginasNotas de Analisis Matematico Basico en Varias VariablesAlexander BenegasAinda não há avaliações
- Programa de Analisis Matematico I UBPDocumento3 páginasPrograma de Analisis Matematico I UBPGaston Federico RamirezAinda não há avaliações
- Ejercicios Resueltos EcuacionesDocumento18 páginasEjercicios Resueltos EcuacionesUTSAinda não há avaliações
- Derivación Parcial ImplícitaDocumento14 páginasDerivación Parcial Implícitajazmin guerrero0% (2)
- Calculo VectorialDocumento44 páginasCalculo VectorialgsalinasknoAinda não há avaliações
- Proyecto Final Física IIDocumento19 páginasProyecto Final Física IIStephanie100% (1)
- Graciela Chemello Evaluacion Del y para El AprendizajeDocumento24 páginasGraciela Chemello Evaluacion Del y para El Aprendizajema_jocorneli100% (1)
- Ej Diferenciabilidad de Una Funcion de Dos VaribalesDocumento1 páginaEj Diferenciabilidad de Una Funcion de Dos VaribalesAndrea Jiménez NúñezAinda não há avaliações
- Ecuaciones ExactasDocumento6 páginasEcuaciones ExactasDiacono10Ainda não há avaliações
- Teorema de StokesDocumento6 páginasTeorema de StokesJesus ArroyoAinda não há avaliações
- CALCULO 3 Extremos Condicionados (Minimos y Maximos)Documento9 páginasCALCULO 3 Extremos Condicionados (Minimos y Maximos)Angel Fer TGAinda não há avaliações
- Teoría Máximos y Mínimos y EjerciciosDocumento3 páginasTeoría Máximos y Mínimos y Ejerciciossebastian lopezAinda não há avaliações
- Matematica 3Documento58 páginasMatematica 3Milton Omar Garcia Salcedo100% (1)
- ExamenDocumento13 páginasExamenKaren Bravo VillaAinda não há avaliações
- Ecuaciones Diferenciales 2Documento28 páginasEcuaciones Diferenciales 2Nlievanoe NlievanoeAinda não há avaliações
- Capitulo 6 - Regla de La Cadena - Derivacion ImplicitaDocumento5 páginasCapitulo 6 - Regla de La Cadena - Derivacion ImplicitaJuan FernandezAinda não há avaliações
- Combinación Lineal de VectoresDocumento11 páginasCombinación Lineal de VectoresAriela HMAinda não há avaliações
- Eigenvalores Imaginarios. Teoria Culitativa de Ecuaciones DiferenciablesDocumento79 páginasEigenvalores Imaginarios. Teoria Culitativa de Ecuaciones DiferenciablesjhersonAinda não há avaliações
- Matriz Jacobinana y JacobianoDocumento3 páginasMatriz Jacobinana y JacobianoLuis Nina PonceAinda não há avaliações
- Diver Grad RotDocumento8 páginasDiver Grad RotJhon Jairo CevallosAinda não há avaliações
- Examen de Admision Resuelto Espol Fisica 2016 PDFDocumento14 páginasExamen de Admision Resuelto Espol Fisica 2016 PDFTábata VillegasAinda não há avaliações
- Informe Geometría en El PlanoDocumento11 páginasInforme Geometría en El PlanoRicardo Mejías ConstanzoAinda não há avaliações
- Tensor de CurvaturaDocumento7 páginasTensor de CurvaturaJavier Garcia RajoyAinda não há avaliações
- Cauchy BiografíaDocumento10 páginasCauchy BiografíaLore ArronaAinda não há avaliações
- Notas - de - Clase Multivariado Co VxMaxima PDFDocumento294 páginasNotas - de - Clase Multivariado Co VxMaxima PDFPablo LeonAinda não há avaliações
- Proyecto Integrador AlgebraDocumento13 páginasProyecto Integrador AlgebraEddyson PalaguachiAinda não há avaliações
- Metodo BiseccionDocumento5 páginasMetodo BiseccionVanny HRAinda não há avaliações
- Ecuaciones Diferenciales (Tema 1)Documento60 páginasEcuaciones Diferenciales (Tema 1)dayanitaC13Ainda não há avaliações
- Tema 2. Límites y ContinuidadDocumento16 páginasTema 2. Límites y ContinuidadAnggie Stephanie Lebrón100% (1)
- Resolución #328 - 2020 Prograna Analítico de Análisis Matemático IIDocumento6 páginasResolución #328 - 2020 Prograna Analítico de Análisis Matemático IILion CherryAinda não há avaliações
- Problemas de Cálculo Integral ResueltosDocumento12 páginasProblemas de Cálculo Integral ResueltosAndres GutierrezAinda não há avaliações
- Unidad IDocumento24 páginasUnidad Ijoab100% (1)
- DiferencialesDocumento20 páginasDiferencialesYaquiPérezVallejosAinda não há avaliações
- Notas para Calculo Avanzado - Pinasco, 2014 UBA PDFDocumento120 páginasNotas para Calculo Avanzado - Pinasco, 2014 UBA PDFrubenvicAinda não há avaliações
- Edodefinitiva PDFDocumento224 páginasEdodefinitiva PDFJuan Jose Isach MayoAinda não há avaliações
- APUNTEEDODocumento216 páginasAPUNTEEDOHermann Rivas GonzalezAinda não há avaliações
- ecuacionesDiferencialesPlan2016 PDFDocumento188 páginasecuacionesDiferencialesPlan2016 PDFManuel BarreraAinda não há avaliações
- Ecuaciones diferenciales ordinarias: Una introducciónNo EverandEcuaciones diferenciales ordinarias: Una introducciónAinda não há avaliações
- Álgebra lineal aplicada a las ciencias económicas 2edNo EverandÁlgebra lineal aplicada a las ciencias económicas 2edNota: 4 de 5 estrelas4/5 (1)
- Demostración de Ecuación de Onda A Partir de La Cuerda Vibrante 2Documento5 páginasDemostración de Ecuación de Onda A Partir de La Cuerda Vibrante 2Leonardo CoralAinda não há avaliações
- Plan de Area Matematica 2018Documento163 páginasPlan de Area Matematica 2018Yulieth GiraldoAinda não há avaliações
- TRADocumento23 páginasTRAJorleidis Valdez mirandaAinda não há avaliações
- Calc Dif ApDocumento141 páginasCalc Dif ApJulio Indili100% (5)
- 6 Pablo Pineda PDFDocumento8 páginas6 Pablo Pineda PDFCarlos Herrera MezaAinda não há avaliações
- UPM - Plan de Estudios Ingeniero AeronáuticoDocumento99 páginasUPM - Plan de Estudios Ingeniero Aeronáuticorobwtf100% (1)
- Introducción Al Cálculo Diferencial e IntegralDocumento10 páginasIntroducción Al Cálculo Diferencial e IntegralElias ValenciaAinda não há avaliações
- Movimiento Vibratorio AmortiguamientoDocumento5 páginasMovimiento Vibratorio AmortiguamientoOCLER BIERY DELGADO MORANAinda não há avaliações
- Unidad 6 Metodos Numericos 6Documento23 páginasUnidad 6 Metodos Numericos 6José FranciscoAinda não há avaliações
- Evaluacion Final - Escenario 8 - SEGUNDO BLOQUE-CIENCIAS BASICAS - CALCULO I - (GRUPO B06)Documento8 páginasEvaluacion Final - Escenario 8 - SEGUNDO BLOQUE-CIENCIAS BASICAS - CALCULO I - (GRUPO B06)Cypher Col0% (1)
- Apunte Fisica 2021Documento82 páginasApunte Fisica 2021Leonel CarbonettiAinda não há avaliações
- Formulario de Mecatronica 2023BDocumento24 páginasFormulario de Mecatronica 2023BEnrique TrejoAinda não há avaliações
- 3.14 Derivadas Sucesivas de Una Función.Documento9 páginas3.14 Derivadas Sucesivas de Una Función.Claudia Elisa Orihuela LagunaAinda não há avaliações
- Clase 8 2020Documento18 páginasClase 8 2020Andrés SoriaAinda não há avaliações
- Tarea 03 01 13 Caldif Un PDFDocumento1 páginaTarea 03 01 13 Caldif Un PDFDavid Leonardo Urrego BarriosAinda não há avaliações
- Libro de Ejercicios TEC PDFDocumento92 páginasLibro de Ejercicios TEC PDFJosealberto Hernandez100% (1)
- Valores Extremos de Funciones de Varias VariablesDocumento15 páginasValores Extremos de Funciones de Varias VariablesFrancis SergeyevichAinda não há avaliações
- Anastasi y Urbina Cap 3Documento37 páginasAnastasi y Urbina Cap 3Argenis Correa100% (1)
- Guia 2 MAT FINANDocumento7 páginasGuia 2 MAT FINANhamilton arizaAinda não há avaliações
- Derivadas de FuncionesDocumento31 páginasDerivadas de FuncionesRosa Rosiris Daza QuirozAinda não há avaliações
- PDC Matematica 6toDocumento15 páginasPDC Matematica 6tomatf1977Ainda não há avaliações
- 2023 I PAO CUV Ex1 RubricaDocumento6 páginas2023 I PAO CUV Ex1 RubricaThunder LeopardAinda não há avaliações
- Tabla de Derivadas e Integrales Versic3b3n b2Documento1 páginaTabla de Derivadas e Integrales Versic3b3n b2Roy Lander Sigueñas Fernández0% (1)
- Encuadre Calculo Diferencial 2022 - 080440Documento5 páginasEncuadre Calculo Diferencial 2022 - 080440Roberto AlvaroAinda não há avaliações
- CI 1.1 Antiderivada Mov RectDocumento5 páginasCI 1.1 Antiderivada Mov RectandreaAinda não há avaliações
- Serie de TaylorDocumento29 páginasSerie de TaylorRafael Campillo Rodríguez100% (3)
- Selcn PDFDocumento174 páginasSelcn PDFCharlyAinda não há avaliações
- Trabajo TopografiaDocumento5 páginasTrabajo TopografiaGenesis InojosaAinda não há avaliações
- Calculo DiferencialDocumento9 páginasCalculo DiferencialsofAinda não há avaliações
- Teorema de Fubini - Demostración PDFDocumento8 páginasTeorema de Fubini - Demostración PDFEdilson Sarmiento AlonsoAinda não há avaliações