Você também pode gostar
- Adv Surface Design R20 EVALDocumento60 páginasAdv Surface Design R20 EVALa7254223Ainda não há avaliações
- References for vibration analysis and machine condition monitoringDocumento10 páginasReferences for vibration analysis and machine condition monitoringNikhil ThakurAinda não há avaliações
- Vas 5052 Vehicle Diagnostic Tool ManualDocumento32 páginasVas 5052 Vehicle Diagnostic Tool Manualautool100% (2)
- Autoturism 201310Documento2.316 páginasAutoturism 201310razvanjuv0% (1)
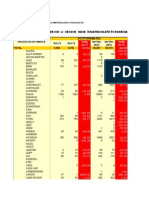
- Livrari Autoturisme Autohtone / Domestic Passenger Car SalesDocumento3 páginasLivrari Autoturisme Autohtone / Domestic Passenger Car SalesrazvanjuvAinda não há avaliações
- Date Statistice APIA 2010-2011Documento3 páginasDate Statistice APIA 2010-2011Razvan GanglerAinda não há avaliações
- Part Design With CatiaDocumento42 páginasPart Design With CatiaBirolC.YakupoğluAinda não há avaliações
- Introducere in Sisteme Micro-Electro-Mecanice (MEMS)Documento27 páginasIntroducere in Sisteme Micro-Electro-Mecanice (MEMS)razvanjuvAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Speed Control of Induction MotorsDocumento6 páginasSpeed Control of Induction Motorsthamilmaran alwarAinda não há avaliações
- Basic EE Week 5 Lesson - 1348765688Documento22 páginasBasic EE Week 5 Lesson - 1348765688Reinier FrancoAinda não há avaliações
- Transformer Bushing MonitoringDocumento8 páginasTransformer Bushing Monitoringabes1234100% (1)
- Control Dirección y PWM Motor DC NIDocumento21 páginasControl Dirección y PWM Motor DC NIEuler Deza FigueroaAinda não há avaliações
- Bernoulli's Theorem ExperimentDocumento4 páginasBernoulli's Theorem ExperimentT/ROX94% (18)
- Ch5 - Rotation SpectraDocumento13 páginasCh5 - Rotation SpectraRajkumar MuthumanickamAinda não há avaliações
- X Electricity PDFDocumento3 páginasX Electricity PDFLushila MinjAinda não há avaliações
- 01.4TB.062 Choosing Current Transformers For Relaying UseDocumento1 página01.4TB.062 Choosing Current Transformers For Relaying UseMark lord bongat100% (1)
- Text 1 PDFDocumento668 páginasText 1 PDFshruti choudhury0% (1)
- Induction Motor PresentationDocumento48 páginasInduction Motor PresentationMark Oliver Bernardo100% (2)
- Kinematics Engineering PaperDocumento8 páginasKinematics Engineering PaperAnonymous 9uu04elAinda não há avaliações
- Why X/R Ratio Matters for Short Circuit AnalysisDocumento3 páginasWhy X/R Ratio Matters for Short Circuit AnalysisDineesh SankaranarayananAinda não há avaliações
- HV Substation Overvoltage Computation Taking Into Account Frequency Dependent Transients On The Substation Grounding SystemDocumento6 páginasHV Substation Overvoltage Computation Taking Into Account Frequency Dependent Transients On The Substation Grounding Systemostojic007Ainda não há avaliações
- Et214 2005Documento17 páginasEt214 2005syamdev3150Ainda não há avaliações
- Ee Fe 2019 NotesDocumento9 páginasEe Fe 2019 Notesfem mece3381Ainda não há avaliações
- Boundary Layer CorrectionDocumento5 páginasBoundary Layer CorrectionmgskumarAinda não há avaliações
- HW1 SolutionsDocumento11 páginasHW1 SolutionsAlex LieuAinda não há avaliações
- EET417 Chapter 2 - Part1Documento24 páginasEET417 Chapter 2 - Part1vino drenAinda não há avaliações
- Experiment # 3 Conservation of EnergyDocumento5 páginasExperiment # 3 Conservation of EnergyellatsAinda não há avaliações
- 8P - Relative - Motion - WRT - Translating AxesDocumento19 páginas8P - Relative - Motion - WRT - Translating AxesIsaias ArroyoAinda não há avaliações
- CH 05Documento36 páginasCH 05Doubles SeducationAinda não há avaliações
- SolvedDocumento36 páginasSolvedJatin hemwani73% (30)
- Elecs Compilation 1Documento42 páginasElecs Compilation 1Raine LopezAinda não há avaliações
- A High-Performance SPWM Controller For Three-Phase UPS Systems Operating Under Highly Nonlinear LoadsDocumento5 páginasA High-Performance SPWM Controller For Three-Phase UPS Systems Operating Under Highly Nonlinear LoadsIJIERT-International Journal of Innovations in Engineering Research and TechnologyAinda não há avaliações
- RPH ElectricityDocumento7 páginasRPH ElectricityNajiha AlHabsyiAinda não há avaliações
- Class Xi Physics Annual Exam 2017 18Documento3 páginasClass Xi Physics Annual Exam 2017 18Anupam TiwariAinda não há avaliações
- Subject Name:Electrical Machines-IDocumento3 páginasSubject Name:Electrical Machines-IAkhil VemulaAinda não há avaliações
- Arcmon, FlyerDocumento2 páginasArcmon, Flyerمنذر الجلبيAinda não há avaliações
- Service Manual: ModelDocumento67 páginasService Manual: ModelSunthron SomchaiAinda não há avaliações