Você também pode gostar
- 2016 Phonics Screening Check Pupils Materials - Standard Sta167501eDocumento24 páginas2016 Phonics Screening Check Pupils Materials - Standard Sta167501enarumugai29Ainda não há avaliações
- Chapter 5 Simple MachinesDocumento3 páginasChapter 5 Simple Machinesnarumugai29Ainda não há avaliações
- Hinestroza Full 93 04Documento0 páginaHinestroza Full 93 04prakush_prakushAinda não há avaliações
- Nano Robotic TutorialDocumento23 páginasNano Robotic Tutorialnarumugai29Ainda não há avaliações
- Drug Discovery andDocumento4 páginasDrug Discovery andBiopetroAinda não há avaliações
- Nano01 Solids PrintDocumento13 páginasNano01 Solids Printnarumugai29Ainda não há avaliações
- Trends WebDocumento15 páginasTrends Webnarumugai29Ainda não há avaliações
- Cell Structure & Function GuideDocumento26 páginasCell Structure & Function Guideveeramani0% (1)
- Class 13 - Mathematical Modeling of Thermal SystemDocumento15 páginasClass 13 - Mathematical Modeling of Thermal Systemapi-2667661650% (2)
- Image ProcessingDocumento16 páginasImage Processingnarumugai29Ainda não há avaliações
- Planar Running RobotDocumento6 páginasPlanar Running Robotnarumugai29Ainda não há avaliações
- Eagletter PDFDocumento24 páginasEagletter PDFnarumugai29Ainda não há avaliações
- Mathematical Model PDFDocumento0 páginaMathematical Model PDFnarumugai29Ainda não há avaliações
- Mechatronics 2010 ETH Zurich Running Gait OptimizationDocumento8 páginasMechatronics 2010 ETH Zurich Running Gait Optimizationnarumugai29Ainda não há avaliações
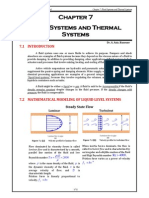
- Fluid Systems and Thermal Systems - 3 PDFDocumento11 páginasFluid Systems and Thermal Systems - 3 PDFnarumugai29Ainda não há avaliações
- Anna University PhD Admission DetailsDocumento35 páginasAnna University PhD Admission DetailsSelva RajAinda não há avaliações
- Research PHDDocumento3 páginasResearch PHDDhinu LalAinda não há avaliações
- Shiatsu Relieves Digestive ProblemsDocumento6 páginasShiatsu Relieves Digestive Problemsnarumugai29Ainda não há avaliações
- List of Engineering Colleges Affiliated To Anna University CoimbatoreDocumento7 páginasList of Engineering Colleges Affiliated To Anna University Coimbatorenarumugai29Ainda não há avaliações
- Annexure For PHD NITT PDFDocumento8 páginasAnnexure For PHD NITT PDFnarumugai29Ainda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- WB-Mech 120 Ch04 StaticDocumento49 páginasWB-Mech 120 Ch04 StaticmrezaianAinda não há avaliações
- Chapter 6 Momentum, Energy and Simple SystemsDocumento32 páginasChapter 6 Momentum, Energy and Simple SystemslachlanAinda não há avaliações
- Physics ProjectDocumento11 páginasPhysics ProjectArushi Sharma88% (8)
- DC Motor ModelingDocumento2 páginasDC Motor Modelingkakavietnam9Ainda não há avaliações
- Project:: KSRP Bhavan at Madiwala, BengaluruDocumento8 páginasProject:: KSRP Bhavan at Madiwala, BengaluruPraveen KumarAinda não há avaliações
- Active and Passive Components in Electronics: Types of Electronic ComponentsDocumento6 páginasActive and Passive Components in Electronics: Types of Electronic ComponentsHackerzillaAinda não há avaliações
- Laws of Motion-01Documento34 páginasLaws of Motion-01wixirepAinda não há avaliações
- Earthing System Maintenance GuideDocumento22 páginasEarthing System Maintenance GuideJuvencio Molina100% (1)
- Voltage Sag Mitigation in Electric Arc Furnace With D-STATCOMDocumento7 páginasVoltage Sag Mitigation in Electric Arc Furnace With D-STATCOMPudhur Kannan ManiAinda não há avaliações
- Design of 48 V Voltage Regulator Modules With A Novel Integrated MagneticsDocumento9 páginasDesign of 48 V Voltage Regulator Modules With A Novel Integrated Magneticsraza239Ainda não há avaliações
- Calculation of KvarDocumento9 páginasCalculation of KvartwadintwadAinda não há avaliações
- Ch5 - Rotation SpectraDocumento13 páginasCh5 - Rotation SpectraRajkumar MuthumanickamAinda não há avaliações
- A High-Performance SPWM Controller For Three-Phase UPS Systems Operating Under Highly Nonlinear LoadsDocumento5 páginasA High-Performance SPWM Controller For Three-Phase UPS Systems Operating Under Highly Nonlinear LoadsIJIERT-International Journal of Innovations in Engineering Research and TechnologyAinda não há avaliações
- Basic Hydraulics and Hydraulic PlumbingDocumento76 páginasBasic Hydraulics and Hydraulic PlumbingPlainNormalGuy2100% (1)
- 12: Aperture Antenna: Aperture AntennaDocumento26 páginas12: Aperture Antenna: Aperture Antennasuman uppalaAinda não há avaliações
- Introduction To ElectricityDocumento21 páginasIntroduction To Electricityjayson platinoAinda não há avaliações
- PHYS2265 Modern Physics PHYS2627 Introdu PDFDocumento6 páginasPHYS2265 Modern Physics PHYS2627 Introdu PDFpuceiroaleAinda não há avaliações
- CH 08 SolDocumento116 páginasCH 08 SolmahadevbAinda não há avaliações
- SPH4U June 2012 Exam ReviewDocumento8 páginasSPH4U June 2012 Exam ReviewDavid Fufu50% (2)
- Analysis and Design of Flight Vehicles Structures - BruhnDocumento817 páginasAnalysis and Design of Flight Vehicles Structures - BruhnSrinivasan MuthuvelAinda não há avaliações
- Sirius 3rb2 DatasheetDocumento25 páginasSirius 3rb2 DatasheetCesar IgamiAinda não há avaliações
- ELECTRICAL Engineering Interview Questions With Answers Free Download - EEEDocumento33 páginasELECTRICAL Engineering Interview Questions With Answers Free Download - EEEearhyathAinda não há avaliações
- DC Motor Torque/Speed Curves ExplainedDocumento6 páginasDC Motor Torque/Speed Curves Explainedvincemugnaio100% (1)
- Buckingham π Theorem Dimensional Analysis ProblemsDocumento1 páginaBuckingham π Theorem Dimensional Analysis ProblemsVivek ThakkarAinda não há avaliações
- NPHO Syllabus LatestDocumento3 páginasNPHO Syllabus LatestSanvir RulezzAinda não há avaliações
- Physics 11: Hooke's Law WorksheetDocumento4 páginasPhysics 11: Hooke's Law WorksheetMiguel RuizAinda não há avaliações
- Major Topic:: Grade 8 Physical ScienceDocumento46 páginasMajor Topic:: Grade 8 Physical ScienceClaudia FannyAinda não há avaliações
- Choke CoilDocumento3 páginasChoke CoilagamdeepAinda não há avaliações
- Speed Control of Induction MotorsDocumento6 páginasSpeed Control of Induction Motorsthamilmaran alwarAinda não há avaliações
- The Secrets of Electric Guitar Pickups: by Helmuth E. W. LemmeDocumento4 páginasThe Secrets of Electric Guitar Pickups: by Helmuth E. W. LemmeAlvaro Canaviri MamaniAinda não há avaliações