Escolar Documentos
Profissional Documentos
Cultura Documentos
Errorprueba
Enviado por
Jan ShumwayTítulo original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Errorprueba
Enviado por
Jan ShumwayDireitos autorais:
Formatos disponíveis
24 CAP
ITULO 1. ARITM
ETICA DE PRECISI
ON FINITA
1.8. Sensibilidad de un sistema de ecuaciones li-
neales
Los sistemas de ecuaciones lineales est an presentes en casi todas las areas de la
ciencia, tanto directamente en la discusi on de modelos fsicos como indirectamente en
la soluci on numerica de otros problemas matem aticos. Debido a esto es importante
conocer c omo el uso de aritmetica de precisi on nita puede afectar muchos de los
pasos computados al resolver un sistema de ecuaciones lineales.
Considere el sistema de ecuaciones lineales:
A
1
x =
_
7 10
5 7
__
x
1
x
2
_
=
_
1
0.7
_
= b
1
, (1.3)
el cual tiene como soluci on al vector x = (0 0.1)
T
. Suponga que el vector b
1
se
cambia por b
1
+b, donde b es el vector (10
2
10
2
)
T
. La soluci on del sistema
perturbado es x = (0.17 0.22)
T
. El cambio relativo medido en la norma dos, del
vector b
1
es
b
2
b
1
2
1.15 %.
Este cambio ocasiona un cambio relativo en el vector x, de
x
2
x
2
77 %.
Considere ahora el sistema,
A
2
x =
_
1 1
1 1.026
__
x
1
x
2
_
=
_
50
20
_
= b
2
. (1.4)
La soluci on al sistema lineal 1.4 es el vector (1204 1154)
T
. Si la matriz A
2
se
altera en
A
2
=
_
0 0
0 10
4
_
y los coecientes se redondean a tres dgitos signicativos, la soluci on al sistema
perturbado (A
2
+ A
2
)(x + x) = b
2
es el vector x = (1199 1149)
T
. El redondeo
introdujo un error relativo del 0.4 % en uno de los coecientes de A
2
y un error
relativo aproximado del 0.4 % tanto en x
1
como en x
2
.
1.8. SENSIBILIDAD DE UN SISTEMA DE ECUACIONES LINEALES 25
Geometricamente, estos sistemas representan dos lneas casi paralelas, as , al mover
un poco una de ellas se altera en forma dr astica su punto de intersecci on.
Los sistemas lineales cuyas soluciones son muy sensibles a cambios en sus datos se
denominan mal condicionados. Veamos cu al puede ser una forma de reconocer tales
sistemas.
Considere el sistema lineal de ecuaciones
Ax = b (1.5)
donde, la matriz de coecientes A R
nn
es no singular. Se desea determinar los
cambios relativos en el vector soluci on x, dado que se ha realizado alg un cambio en
b o en A.
En primer lugar, suponga que el vector b se cambia por el vector b + b, y que
la soluci on al sistema perturbado es el vector x + x, es decir,
A(x + x) = b + b. (1.6)
A partir de las ecuaciones (1.5), (1.6) y para cualquier norma p en R
n
, con su
correspondiente norma matricial inducida, se deducen las siguientes desigualdades,
1
x
A
b
y x A
1
b.
por lo tanto,
x
x
AA
1
b
b
(1.7)
En segundo lugar, si la matriz A se altera en A, se tiene
(A + A)(x + x) = b
Ax = A x
x A
1
Ax,
por lo tanto,
x
x
AA
1
A
A
(1.8)
Las desigualdades (1.7) y (1.8) permiten concluir que el cambio relativo en la solu-
ci on x est a acotado superiormente por el cambio relativo en los datos ( b o A),
multiplicado por el factor AA
1
, conocido como n umero de condicion de la
matriz A denotado por (A). El estudio de este n umero es determinante en el
an alisis de la sensibilidad de un sistema de ecuaciones lineales.
26 CAP
ITULO 1. ARITM
ETICA DE PRECISI
ON FINITA
Ejemplo 1.17. Para las matrices A
1
y A
2
de los sistemas (1.3) y (1.4), respecti-
vamente, se tiene que
1
(A
1
) = 289 y
1
(A
1
) = 0.107.
Ejemplo 1.18. Sea A = I
n
y
p
una norma p en R
n
.
p
(A) = I
n
p
I
1
n
p
= 1.
A continuaci on, se presentan algunas observaciones sobre el n umero de condicion
de una matriz que lo hacen una cantidad de gran importancia en el contexto de la
soluci on numerica de sistemas de ecuaciones lineales.
El n umero de condici on vara con la norma. Para una norma consistente
21
, siempre
est a acotado inferiormente por uno. En efecto, Sea A una matriz no singular y
una norma consistente. Luego,
1 = I
n
= AA
1
A A
1
= (A).
Si el n umero de condici on de una matriz est a pr oximo a uno (matriz bien condiciona-
da), cambios relativos peque nos en b o en A pueden producir cambios relativos
peque nos en la soluci on del sistema lineal. Pero, si dicho n umero es grande (matriz
mal condicionada), cambios relativos peque nos pueden producir cambios grandes en
la soluci on (ver desigualdades (1.7) y (1.8)).
La matriz de Hilbert denida en el Captulo 1, es un ejemplo tpico de una ma-
triz mal condicionada. Por ejemplo, (H
10
) = 1.6 10
13
. Esto implica que ni con
precisi on doble se consigue resolver sistemas de ecuaciones lineales cuya matriz de
coecientes sea esta matriz.
En la norma dos, (A) es la raz on entre la m axima y mnima longitud inducida por
A en la bola unitaria.
Por lo tanto,
2
(A) = A
2
A
1
2
=
m ax
x
2
=1
Ax
2
mn
x
2
=1
Ax
2
Puesto que la mnima longitud inducida por una matriz singular es cero (una matriz
singular B tiene el peor n umero de condici on). El n umero de condici on de una
matriz singular puede considerarse como innito. As , el n umero de condicion de
21
AB AB.
1.9. ESTABILIDAD DE UN ALGORITMO 27
una matriz no singular es una medida de la cercana de la matriz a la singularidad.
En efecto, se puede demostrar que si A es una matriz no singular de orden n y
norma matricial, entonces
1
(A)
= mn
B
_
AB
A
: B es una matriz singular
_
es decir, si (A) , la matriz A puede aproximarse por una matriz singular B.
El n umero (A) no se afecta al multiplicar la matriz por un escalar real no
nulo, es decir (A) = (A) (ver la secci on Ejercicios Resueltos, al nal de este
captulo).
Algunos metodos de factorizaci on limitan el cambio relativo en A a un m ultiplo
constante del epsilon de la m aquina. Luego, en precisi on nita, el error relativo en
la soluci on est a acotado por un m ultiplo constante de (A) . As, (A) es una
cantidad util para limitar la sensibilidad de la soluci on del sistema lineal a errores
en sus datos o a los efectos de aritmetica de precisi on nita.
Un problema en el c alculo de (A) es encontrar A
1
, no solo porque puede ser
no conable, sino raramente justicado. Una forma de estimar (A) es dada por
(A) = M INVER,
donde M es A o un factor de A que tenga n umero de condici on del mismo orden
que el de A, e inver es una estimaci on de M
1
(para m as detalles ver [?],
Captulo 3.)
1.9. Estabilidad de un Algoritmo
Un problema matem atico que tiene soluci on unica y para el cual cambios peque nos
en sus datos de entrada causan peque nos cambios en los resultados, se denomina un
problema bien colocado. La segunda condici on es llamada estabilidad del problema
con relacion a los datos.
En forma analoga, cuando se trata de un algoritmo su estabilidad (o inestabilidad)
da informaci on sobre su sensibilidad a los errores de redondeo acumulados en los
c alculos. As, los algoritmos en los cuales, el efecto acumulativo de tales errores es
limitado, generando un resultado util, se denominan algoritmos estables. Desafortu-
nadamente, hay situaciones en que la acumulaci on de errores es grande, generando
soluciones muy diferentes de las que se buscan. En este caso, los algoritmos se de-
nominan algoritmos inestables.
28 CAP
ITULO 1. ARITM
ETICA DE PRECISI
ON FINITA
Un problema matem atico puede estar bien colocado y en el c alculo de soluciones
aproximadas es posible que se utilicen algoritmos inestables.
Ejemplo 1.19. El problema matematico de resolver la ecuacion cuadratica real
ax
2
+ bx + c = 0 con a = 0 es cerrado. Sus dos races estan dadas por:
x =
b
b
2
4ac
2a
(1.9)
El calculo numerico de estas races es delicado ya que al usar las formulas dadas por
(1.9) es posible que su evaluacion no culmine satisfactoriamente o que el computo
nal diera considerablemente del valor verdadero. En efecto, es posible que se pre-
sente la siguiente situacion:el termino b
2
domina en la expresion b
2
4ac. En este
caso el numerador de (1.9) sera aproximadamente b |b|, lo cual, dependiendo
de la eleccion del signo conduce a la diferencia de dos n umeros casi identicos lo a su
vez implica la perdida de dgitos signicativos y ello inuira en la respuesta nal.
Una alternativa es calcular la mayor raz, en valor absoluto a partir de (1.9) y con
esta informacion usar la propiedad de las races de la ecuacion de segundo grado:
x
1
x
2
= c/a,
para obtener la otra raz.
Observe que con la alternativa anterior a un puede presentarse una situacion de
perdida de precision en el calculo de una raz cuando b
2
4ac. Para este caso,
no existe un forma algebraica de reescribir la diferencia b
2
4ac y evitar dicha
perdida. Se recomienda usar precision doble en el computo de esta diferencia.
A continuaci on se presenta un ejemplo de un algoritmo inestable.
Ejemplo 1.20. Se desea calcular numericamente la siguiente integral.
E
n
=
_
1
0
x
n
e
x1
dx, para n = N.
Integrando por partes, se tiene
_
1
0
x
n
e
x1
dx = x
n
e
x1
1
0
_
1
0
nx
n1
e
x1
dx,
por lo tanto,
E
1
= e
1
y E
n
= 1 nE
n1
. (1.10)
1.9. ESTABILIDAD DE UN ALGORITMO 29
Considere el problema de calcular E
n
para n = 9 en un computador caracterizado
con = 10 y t = 6. Usando (1.10) para computar aproximaciones a los nueve
valores sucesivos de E
n
, se obtiene
(E
1
) 0.367879 (E
4
) 0.170904 (E
7
) 0.110160
(E
2
) 0.264242 (E
5
) 0.145480 (E
8
) 0.118720
(E
3
) 0.207274 (E
6
) 0.127120 (E
9
) 0.06848.
El integrando x
9
e
x1
es positivo en el intervalo (0, 1), el valor computado para E
9
es negativo. Cual fue la causa del error?
Suponiendo que el unico error de redondeo en los calculos anteriores fue hecho en
E
1
, donde e
1
se redondeo a 6 dgitos signicativos y debido a que la formula de
recurrencia (2.7) que se obtuvo integrando por partes es exacta para aritmetica real ,
las restas y multiplicaciones introducen errores relativamente despreciables, se puede
explicar el error en E
9
de la siguiente forma:
El error en E
1
(4.412 10
7
) se multiplico por (2) en el calculo de E
2
, luego
el error en E
2
se multiplico por (3) en el calculo de E
3
y as sucesivamente.
De esta forma, el error en E
9
es exactamente el error en E
1
multiplicado por
(2)(3) (9) = 9!, es decir, 9! 4.412 10
7
0.1601. Esta enorme mag-
nicacion del error inicial es consecuencia del algoritmo que se escogio para llevar
a cabo la solucion del problema, por ello se dice que el algoritmo es inestable.
C omo escoger un algoritmo para este problema de tal forma quese evite la inesta-
bilidad? La respuesta se tiene reescribiendo la f ormula de recurrencia (1.10) de la
siguiente manera.
E
n+1
=
1 E
n
n
, n = N + m, N + (m1), . . . , N.
E
N+m
= c
0
.
En cada etapa de la computaci on, el error en E
n
decrece en un factor de 1/n. Es
decir, si empieza con un valor para alg un E
n
con n 1 y trabaja hacia atras,
cualquier error inicial o errores de redondeo, los cuales ocurren, estar an decreciendo
en cada paso. Para obtener un valor inicial c
0
observe que,
E
n
=
_
1
0
x
n
e
x1
dx
_
1
0
x
n
dx =
x
n+1
n + 1
1
0
=
1
n + 1
.
As, E
n
0 cuando n . Por ejemplo, si aproximamos E
20
por cero y usa-
mos este como valor inicial, se tiene un error inicial de a lo m as 1/21. Este error
30 CAP
ITULO 1. ARITM
ETICA DE PRECISI
ON FINITA
se multiplica por 1/20 al computar E
19
es decir, el error en E
19
es a lo m as
(1/20)(1/21) 0.0024. Para E
15
el error inicial se ha reducido a menos de 410
8
,
el cual es menor que el error de redondeo. Al efectuar los c alculos se obtiene,
(E
20
) 0.0000000 (E
16
) 0.0557190 (E
12
) 0.0717783
(E
19
) 0.0500000 (E
15
) 0.059176 (E
11
) 0.0773523
(E
18
) 0.0500000 (E
14
) 0.0627322 (E
10
) 0.0838771
(E
17
) 0.0527778 (E
13
) 0.0669477 (E
9
) 0.0916123.
(J)
En E
15
, el error inicial ha sido completamente amortiguado por el algoritmo y los
valores desde E
15
hasta E
9
son precisos en 6 dgitos con un error de redondeo
posiblemente en el ultimo dgito. El anterior es un ejemplo de un algoritmo estable.
1.10. EJERCICIOS RESUELTOS 31
1.10. Ejercicios Resueltos
1. Sean A y A matrices de orden n, con A no singular y b R
n
. Demuestre
que si AA
1
= r < 1 entonces el sistema perturbado
(A + A)y = b + b, b R
n
es no singular. Ademas, si A A y b b para alg un 0
entonces
x y
x
2 (A)
(1 r)
Demostracion. Basta demostrar que (A+A) es no singular. Una condici on
suciente para ello es, A
1
A < 1 (Ver Captulo 1, Secci on 1.7 Ejercicio
6). Utilizando una norma matricial consistente se tiene
A
1
A A
1
A = r < 1.
Consideremos ahora el sistema perturbado
(A + A)y = b + b,
haciendo y = x + x, donde x es tal que Ax = b, se tiene
(A + A)x = b Ax
utilizando la no singularidad de la matriz (A+A) y las desigualdades A
A y b b, despejamos el vector x y acotamos su norma,
x = (A + A)
1
(b Ax)
(A + A)
1
b Ax
Utilizando la segunda parte del Ejercicio 6 del Captulo 1, Secci on 1.9,
y x = x
A
1
(1 r)
(b + Ax)
A
1
(1 r)
(Ax + Ax)
2 (A)
(1 r)
x,
2. Demuestre que fl(1 m) = 1
t
cuando se usa aritmetica de truncamiento
en un computador en el cual t 1 L.
32 CAP
ITULO 1. ARITM
ETICA DE PRECISI
ON FINITA
Demostracion. De la Secci on 2.1, se sabe que m =
L1
. Utilizando ar-
itmetica de truncamiento se debe demostrar que el mayor n umero mas cercano
a 1 m y menor que este es 1
t
, es decir
si x 1
L1
entonces x 1
t
.
Supongamos que x > 1
t
, luego
0 <
t
L1
t
>
L1
t > L 1
t < 1 L
t 1 < L.
Esta desigualdad contradice el hecho que t 1 L.
3. Demuestre que si fl(x) = x(1 +
1
) y fl(y) = y(1 +
2
) donde |
1
| << 1 y
|
2
| << 1, entonces fl(x) fl(y) = (x y)(1 + ) donde es peque no a
menos que x o y sea mucho m as grande que x y.
Demostracion.
fl(x) fl(y) = x(1 +
1
) y (1 +
2
)
= (x y) + x
1
y
2
= (x y)
_
1 +
x
x y
y
x y
2
_
= (x y)(1 + ),
donde,
=
x
x y
1
y
x y
2
.
Si x y y son m as peque nos que x y y dado que |
1
| << 1 y |
2
| << 1,
se puede armar que || << 1.
4. Demuestre que para cualquier norma matricial consistente,
(AB) (A)(B)
(A) = (A),
donde es un real no nulo.
1.10. EJERCICIOS RESUELTOS 33
Demostracion. A continuaci on se usa la denici on de n umero de condici on de
una matriz con cualquier norma matricial consistente.
a) Sean A y B matrices de orden n.
(AB) = AB(AB)
1
= ABB
1
A
1
ABB
1
A
1
(A)(B).
b) Sea A una matriz de orden n y un escalar no nulo,
(A) = A(A)
1
= | | A |
1
| A
1
= |
1
| AA
1
= (A)
5. Considere el sistema de ecuaciones lineales
_
1 k
0 1
__
x
1
x
2
_
=
_
1
1
_
k 0,
cuya solucion es el vector x = (1k 1)
T
. Encuentre una cota para el error
relativo x
/x
en terminos del error relativo b
/b
, donde
b = (
1
2
)
T
,
1
= 0,
2
= 0.
Este ejercicio demuestra que el problema esta bien condicionado, a pesar de
que el n umero de condicion de la matriz es grande.
Demostracion. La matriz de coecientes del sistema es no singular. Su inversa
es
_
1 k
0 1
_
.
Sin dicultad en los c alculos, se encuentra el n umero de condici on de la matriz
de coecientes del sistema, el cual es
(A) = (1 + k)
2
.
34 CAP
ITULO 1. ARITM
ETICA DE PRECISI
ON FINITA
Observe que si el valor de k es grande, el n umero condici on de la matriz es
grande. Determinemos el cambio en la soluci on del sistema cuando el vector
b se altera en b + b. Resolviendo el sistema perturbado
_
1 k
0 1
__
x
1
x
2
_
=
_
1 +
1
1 +
2
_
,
se encuentra:
_
x
1
x
2
_
=
_
1 +
1
k k
2
1 +
2
_
=
_
1 k
1
_
. .
x
+
_
1
k
2
2
_
. .
x
.
Acotemos el error relativo en la soluci on en terminos del error relativo de b
b
= b
= m ax{|
1
|, |
2
|}.
Para el caso |
1
| |
2
|, k > 2, se tiene b
= |
1
|, y
x
= m ax{|
1
k
2
|, |
2
|}
= |
1
| m ax
_
1 k
_
|
1
|(k + 1)
= b
k + 1
k 1
x
=
k + 1
k 1
b
3
b
En forma similar, se obtiene la misma cota cuando se considera k < 2 y para
el caso |
1
| |
2
|, con k 0.
35
Ejercicios
2.1. Exprese los siguientes n umeros decimales en su forma binaria.
x = 127 x = 0.008 x = 0.1
2.2. Exprese los siguientes n umeros binarios a su forma decimal.
x = (10110011)
2
x = (00000001)
2
x = (01111100)
2
2.3. En caso de ocurrir un underow, cu al es el error relativo que se comete al
reemplazar la cantidad que produce el underow por cero?
2.4. Demuestre que
(AB) = AB + C, donde |C| nu|A||B| + O(u
2
).
2.5. En una m aquina que trabaja con aritmetica de redondeo, = 10,
t = 5, que n umeros reales x tienen la propiedad (1.0 + x) = 1.0?
2.6. Muestre que el sistema
_
10
4
1
0 1
__
x
y
_
=
_
2
3
_
est a mal condicionado, si el redondeo se hace a tres dgitos signicativos. Cual
es el error relativo aproximado que se induce en cada respuesta por redondeo?
2.7. Suponga que x es representado en un computador por fl(x), donde este
ultimo se obtiene por redondeo. Calcule cotas para los errores relativos de
w = 2fl(x) y w = fl(x) + fl(x).
2.8. De un ejemplo de un algoritmo inestable.
2.9. Encuentre una cota para el error relativo que se produce al multiplicar dos
n umeros en punto otante, en un computador con sistema binario.
36 CAP
ITULO 2. EJERCICIOS
2.10. Considere el algoritmo: { Dados x y y R
n
, el siguiente algoritmo computa
x
T
y y guarda el resultado en s }
s := 0
Para k = 1, . . . , n
s := s + x
k
y
k
.
Demuestre que si este algoritmo se aplica con y = x, entonces:
(x
T
x) = x
T
x (1 + )
donde || nu + O(u
2
).
2.11. De un ejemplo en el cual se ilustre que el producto de matrices en aritmetica
de precisi on nita no necesariamente tiene error relativo peque no.
2.12. Suponga la existencia de una funci on raz cuadrada, la cual satisface que
(
x) =
x(1 + ), || u. Construya un algoritmo para computar x
2
y el cual acote los errores de redondeo.
2.13 Escriba un programa para calcular el epsilon de la m aquina. Puede suponer
que el epsilon es una potencia de dos.
2.14. Demuestre que para toda matriz E R
mn
, m n, se satisface la desigual-
dad:
|E|
2
nE
2
.
2.15 En cada uno de los siguientes c alculos, ocurrir a un underow, en que casos es
razonable sustituir por cero la expresi on que causa el underow? Justique su
respuesta.
x :=
_
x
2
+ y
2
con x = 1, y = 10
50
.
x :=
_
x
2
+ y
2
con x = y = 10
50
.
v := (wx)/(yz) con w = 10
30
,
x = 10
60
, y = 10
40
, z = 10
50
.
2.16 Suponga que tiene un computador con base diez y dos dgitos de precisi on, el
cual trabaja con aritmetica de truncamiento.
Cu antos dgitos signicativos de la respuesta real obtiene cuando aprox-
ima 1/3 ? Cu al es el error absoluto y relativo de la respuesta obtenida?
37
Si el problema se cambia a aproximar 100/3 realice el an alisis de la parte
anterior. Que demuestra esto acerca de la utilidad del error relativo versus
el absoluto?
2.16 Sea A una matriz no singular y
p
una norma p. Demuestre que,
A
1
=
1
mn
xp=1
Ax
p
y K
p
(A) =
m ax
xp=1
Ax
p
mn
xp=1
Ax
p
2.17 Sean A y B matrices no singulares de orden n. Demuestre que
p
(AB)
p
(A)
p
(B) y
(A) =
1
(A
T
).
2.18 Compare el determinante y el n umero condici on de la matriz,
_
_
10
8
0 0
0 10
8
0
0 0 10
8
_
_
.
2.19 Demuestre que, si A es una matriz no singular tal que A
1
E
p
< 1 entonces
la matriz A + E es no singular y
(A + E)
1
A
1
p
E
p
A
1
2
p
1 A
1
E
p
2.20 Verique que la desigualdad
E
p
A
p
<
1
p
(A)
es una condici on suciente para que la matriz A+E sea no singular. Realice
una interpretaci on de este resultado teniendo en cuenta la teora vista para
sensibilidad de un sistema de ecuaciones lineales.
2.21 Demuestre que si
a) A es no singular
38 CAP
ITULO 2. EJERCICIOS
b)
A
A
<
1
(A)
c) Ax = b
d) (A + A) (x + x) = b + b,
entonces
x
x
(A)
_
A
A
+
b
b
_
1 (A)
A
A
2.22 Considere la matriz parametrizada A(t) = [ a
ij
(t) ] R
mn
, donde t es un
par ametro real. Suponga que las componentes de A(t) son todas funciones
diferenciables de la variable t y dena,
A
(t) =
d
dt
A(t) =
_
d
dt
a
ij
(t)
_
= a
ij
(t).
a) Si A(t) R
mn
y B(t) R
np
son matrices cuyas componentes son
todas funciones diferenciables de t demuestre que,
d
dt
( A(t) B(t) ) = A
(t) B(t) + A(t) B
(t).
b) Si A(t) es es una matriz parametrizada de orden n y no singular para
todo t, demuestre que,
d
dt
A(t)
1
= A(t)
1
A
(t) A(t)
1
.
2.23 Considere el sistema de ecuaciones lineales parametrizado respecto a la variable
real t,
A(t) x(t) = b(t),
donde, todas las componentes de A(t) R
nn
, x(t) R
n
y b(t) R
n
son
diferenciales en t y A(t) es no singular para todo t. Demuestre que,
x
(t) = A(t)
1
b
(t) A(t)
1
A
(t) x(t)
Seg un este resultado, de que depende la sensibilidad se un sistema no singular
a perturbaciones peque nas ?
39
2.24 Serie de Neumann. Sea A R
nn
. Considere la serie matricial innita,
I
n
+ A + A
2
+ =
k=1
A
k
.
Demuestre que si
lm
m
A
m
= O R
nn
entonces (I
n
A) es no singular y
(I
n
A)
1
= I
n
+ A + A
2
+ =
k=1
A
k
.
Esta serie proporciona una aproximaci on de (I
n
A)
1
cuando A tiene com-
ponentes de magnitud peque na. As, una aproximaci on de primer orden es la
matriz I
n
+ A.
2.25 Sean A una matriz no singular de orden n y suponga que A se perturba en
una matriz A. Use el ejercicio anterior para deducir una condicion suciente
para la existencia de (A+A)
1
y bajo esta condici on encuentre una aprox-
imaci on de primer orden para dicha inversa. Adem as, use esta aproximacion
para encontrar una cota superior para los errores absoluto y relativo en el
c alculo de A
1
,
E = A
1
(A + A)
1
E
r
=
A
1
(A + A)
1
A
1
.
Analice brevemente cada uno de estos resultados.
Você também pode gostar
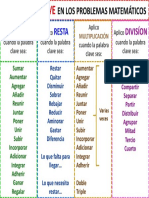
- Palabras Clave para La Resolución de Problemas MatemáticosDocumento1 páginaPalabras Clave para La Resolución de Problemas MatemáticosEdi Bermejo Robles85% (20)
- Manual de Geometria DescriptivaDocumento44 páginasManual de Geometria DescriptivaJosé Luis Arce Flores100% (3)
- 1Documento7 páginas1Daniel PeñaAinda não há avaliações
- Tromba PDFDocumento679 páginasTromba PDFDaniel SuarezAinda não há avaliações
- CARTA GANTT Matemáticas 1°Documento4 páginasCARTA GANTT Matemáticas 1°carolinaAinda não há avaliações
- Historia Del Calculo Infinitesimal Linea Del TiempoDocumento9 páginasHistoria Del Calculo Infinitesimal Linea Del Tiemposuper usuario67% (3)
- Guia para Visado EspañaDocumento16 páginasGuia para Visado EspañaAngieAinda não há avaliações
- Dialnet LaEvaluacion 3629230Documento8 páginasDialnet LaEvaluacion 3629230Admhin HernandezAinda não há avaliações
- InformaciónDocumento4 páginasInformaciónjruizc8Ainda não há avaliações
- (JulianDeZubiría 1999) LaPedagogíaTradicionalYLosModelosInstruccionalesDocumento10 páginas(JulianDeZubiría 1999) LaPedagogíaTradicionalYLosModelosInstruccionalesNicole TurnerAinda não há avaliações
- 76 Des Com Posicion QRDocumento9 páginas76 Des Com Posicion QRJan ShumwayAinda não há avaliações
- Manual Flash Cs5 HelpDocumento549 páginasManual Flash Cs5 Helpalpuchemay176828Ainda não há avaliações
- 398 638 2 PB PDFDocumento5 páginas398 638 2 PB PDFcarlosAinda não há avaliações
- InglesDocumento240 páginasInglesDeivid SierraAinda não há avaliações
- EsquemaDocumento1 páginaEsquemamitsuri .qAinda não há avaliações
- 2 Unid Mates Eso3Documento18 páginas2 Unid Mates Eso3pmaldonado9559100% (2)
- Proyecto de Aula Manitos para Cuidar La TierraDocumento11 páginasProyecto de Aula Manitos para Cuidar La TierraMaRia D' Js AntelizAinda não há avaliações
- Estatica Aplicada en La Ingenieria CivilDocumento22 páginasEstatica Aplicada en La Ingenieria CivilDavid Henry Bernilla Rodriguez50% (2)
- MatemáticasDocumento18 páginasMatemáticasJacob ChavezAinda não há avaliações
- Variación Denominativa y ConceptualDocumento5 páginasVariación Denominativa y ConceptualLydiaAinda não há avaliações
- Guia N°8 Matematica Iv° MedioDocumento6 páginasGuia N°8 Matematica Iv° MedioSebastian MondacaAinda não há avaliações
- Problema Del ViajanteDocumento114 páginasProblema Del ViajantepirincessAinda não há avaliações
- La Economía Del Virreinato Del Perú Bajo Los Habsburgo y La Denominada Crisis Del Siglo XviiDocumento23 páginasLa Economía Del Virreinato Del Perú Bajo Los Habsburgo y La Denominada Crisis Del Siglo Xviigdlo72Ainda não há avaliações
- NAYERLYDocumento10 páginasNAYERLYoscar100% (1)
- Sistema de Pronóstico de La Demanda de Productos PDFDocumento142 páginasSistema de Pronóstico de La Demanda de Productos PDFlucasAinda não há avaliações
- Derivadas PDFDocumento2 páginasDerivadas PDFGuadalupe GarciaAinda não há avaliações
- Expresiones AlgebraicasDocumento2 páginasExpresiones AlgebraicasJoel Fernandez RamosAinda não há avaliações
- FLOTACIONDocumento4 páginasFLOTACIONRosa María HerreraAinda não há avaliações
- Herradura y Sus SecretosDocumento23 páginasHerradura y Sus SecretosDaniel Medvedov - ELKENOS ABE100% (1)
- Asignación GPI 3Documento5 páginasAsignación GPI 3yorAinda não há avaliações
- Actividad de Puntos Evaluables - Escenario 2 - PRIMER BLOQUE-CIENCIAS BASICAS - CALCULO II - (GRUPO B09)Documento4 páginasActividad de Puntos Evaluables - Escenario 2 - PRIMER BLOQUE-CIENCIAS BASICAS - CALCULO II - (GRUPO B09)Marly ClavijoAinda não há avaliações
- PATDocumento2 páginasPATJORGE LUIS MUÑOZ LINARESAinda não há avaliações
- Practica 3 - Econometria - ResueltoDocumento5 páginasPractica 3 - Econometria - ResueltofacenunaAinda não há avaliações
- Lista de Precios SIEMENS 2018Documento207 páginasLista de Precios SIEMENS 2018JoanAndresAlvarezPazAinda não há avaliações
- Errores de RedondeoDocumento2 páginasErrores de RedondeoDeyner VargasAinda não há avaliações
- Teoria de Errores NuevoDocumento93 páginasTeoria de Errores NuevoWiwiDataAinda não há avaliações