Você também pode gostar
- Example of GOOSE Configuration17Documento20 páginasExample of GOOSE Configuration17xploreAinda não há avaliações
- Ag2015-14 20150415Documento12 páginasAg2015-14 20150415Panu Mark IIAinda não há avaliações
- RNU1 User Manual ENUDocumento24 páginasRNU1 User Manual ENUeduar caiAinda não há avaliações
- Netsim: Introductory ExamplesDocumento52 páginasNetsim: Introductory ExamplesIAMATMA100% (1)
- Example GroundFault TransientDocumento23 páginasExample GroundFault TransienticovinyAinda não há avaliações
- AC/DC Current Clamp C-Probe 1: User ManualDocumento33 páginasAC/DC Current Clamp C-Probe 1: User ManualPanu Mark IIAinda não há avaliações
- 34888-Article Text-103509-1-10-20151229Documento13 páginas34888-Article Text-103509-1-10-20151229Panu Mark IIAinda não há avaliações
- What S New in Version 4.30: Primary Test ManagerDocumento26 páginasWhat S New in Version 4.30: Primary Test ManagerSujoy PaulAinda não há avaliações
- Auto ReclosingDocumento7 páginasAuto ReclosingtunghtdAinda não há avaliações
- The Universal Relay Test Set and Commissioning ToolDocumento12 páginasThe Universal Relay Test Set and Commissioning ToolPanu Mark IIAinda não há avaliações
- CM Line Catalog ENU PDFDocumento68 páginasCM Line Catalog ENU PDFCristian Alonso Bayona AcevedoAinda não há avaliações
- DIGSI5 Onlinehelp enUSDocumento1.072 páginasDIGSI5 Onlinehelp enUSPanu Mark IIAinda não há avaliações
- Udslf Iup 2009Documento24 páginasUdslf Iup 2009Panu Mark IIAinda não há avaliações
- From Ustria To Ambia: How A CMC 256plus Supports The Kafue Gorge Regional Training CentreDocumento3 páginasFrom Ustria To Ambia: How A CMC 256plus Supports The Kafue Gorge Regional Training CentrePanu Mark IIAinda não há avaliações
- A New Platform For Validaing Real-Time Large-Scale WAMPAC SystemsDocumento25 páginasA New Platform For Validaing Real-Time Large-Scale WAMPAC SystemsPanu Mark IIAinda não há avaliações
- Tunneling Horizontal IEC 61850 Traffic Through Audio Video Bridging Streams For Flexible Microgrid Control and ProtectionDocumento19 páginasTunneling Horizontal IEC 61850 Traffic Through Audio Video Bridging Streams For Flexible Microgrid Control and ProtectionsavijolaAinda não há avaliações
- XE216 512 TQ128 Datasheet - 1.16Documento81 páginasXE216 512 TQ128 Datasheet - 1.16Panu Mark IIAinda não há avaliações
- CM Line Catalog ENU PDFDocumento68 páginasCM Line Catalog ENU PDFCristian Alonso Bayona AcevedoAinda não há avaliações
- Advanced Windowed Interpolated FFT Algorithms For Harmonic Analysis of Electrical Power SystemDocumento6 páginasAdvanced Windowed Interpolated FFT Algorithms For Harmonic Analysis of Electrical Power SystemYatheesh KaggereAinda não há avaliações
- 7SJ80xx Manual A9 V990903 UsDocumento566 páginas7SJ80xx Manual A9 V990903 UsPanu Mark IIAinda não há avaliações
- What S New in Version 4.30: Primary Test ManagerDocumento26 páginasWhat S New in Version 4.30: Primary Test ManagerSujoy PaulAinda não há avaliações
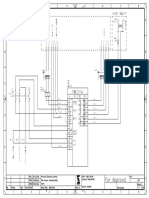
- Sync Relay SPO R1Documento1 páginaSync Relay SPO R1Panu Mark IIAinda não há avaliações
- Distributed IEC 61850 Testing in The Namib DesertDocumento3 páginasDistributed IEC 61850 Testing in The Namib DesertPanu Mark IIAinda não há avaliações
- Distributed IEC 61850 Testing in The Namib DesertDocumento3 páginasDistributed IEC 61850 Testing in The Namib DesertPanu Mark IIAinda não há avaliações
- Standard Network: How Many Do We Really Need?Documento7 páginasStandard Network: How Many Do We Really Need?Panu Mark IIAinda não há avaliações
- The Universal Relay Test Set and Commissioning ToolDocumento12 páginasThe Universal Relay Test Set and Commissioning ToolPanu Mark IIAinda não há avaliações
- Example of GOOSE Configuration17Documento20 páginasExample of GOOSE Configuration17xploreAinda não há avaliações
- 7PA22510 Datasheet enDocumento2 páginas7PA22510 Datasheet enPanu Mark IIAinda não há avaliações
- 7SJ80xx Manual A9 V990903 UsDocumento566 páginas7SJ80xx Manual A9 V990903 UsPanu Mark IIAinda não há avaliações
- Tcs 7PA26 - 27 - 30 - Catalog - SIP-2008 - en PDFDocumento7 páginasTcs 7PA26 - 27 - 30 - Catalog - SIP-2008 - en PDFBagus Permadi100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Distribution Planning Manual - EPD-M1Documento154 páginasDistribution Planning Manual - EPD-M1Ahmed FaroukAinda não há avaliações
- Safety Testing Oh Machines - IFADocumento55 páginasSafety Testing Oh Machines - IFAMarco LoiaAinda não há avaliações
- Is 2026, Part 3Documento44 páginasIs 2026, Part 3Himansu Sekhar Jena100% (1)
- Iec60335 2 21fDocumento84 páginasIec60335 2 21fCvetan StramskiAinda não há avaliações
- 3.2 Powercommand 3.3 Spec Sheet S-1570Documento11 páginas3.2 Powercommand 3.3 Spec Sheet S-1570akheel201Ainda não há avaliações
- UCI274HDocumento8 páginasUCI274H3efooAinda não há avaliações
- KSEC100Documento8 páginasKSEC100talaporriAinda não há avaliações
- Distance Protection 7SA522Documento40 páginasDistance Protection 7SA522MrC03Ainda não há avaliações
- Final - Report Hydroelectric Power PlantDocumento39 páginasFinal - Report Hydroelectric Power PlantnisarAinda não há avaliações
- Investigation of Microgrids With Both Inverter Interfaced and Direct AC-Connected Distributed Energy ResourcesDocumento9 páginasInvestigation of Microgrids With Both Inverter Interfaced and Direct AC-Connected Distributed Energy ResourcesAhmed WestministerAinda não há avaliações
- SR VaristorDocumento25 páginasSR VaristorrushbrAinda não há avaliações
- Canadian-Solar Datasheet Inverter 3ph 100-110KW-ROW ENDocumento2 páginasCanadian-Solar Datasheet Inverter 3ph 100-110KW-ROW ENgilsonAinda não há avaliações
- Energy Storage Needs in SpainDocumento56 páginasEnergy Storage Needs in SpainAhmed WestministerAinda não há avaliações
- Industrial Control Circuits PresentationDocumento24 páginasIndustrial Control Circuits PresentationAbrhaAinda não há avaliações
- 1MRK590002 BEN en Phased Out Products and Their ReplacementsDocumento4 páginas1MRK590002 BEN en Phased Out Products and Their Replacementsrenjithas2005Ainda não há avaliações
- WindDocumento10 páginasWindBehairy Ahmed0% (1)
- Acuum Ircuit Reaker: Phase II - Module No. STC-TRS-Conv.-02Documento18 páginasAcuum Ircuit Reaker: Phase II - Module No. STC-TRS-Conv.-02mikkumar5Ainda não há avaliações
- Buchholz RelayDocumento2 páginasBuchholz RelayHamayoun MurtazaAinda não há avaliações
- Transformer Test: Prepared By: Nishant AcharyaDocumento30 páginasTransformer Test: Prepared By: Nishant AcharyaVishal PatelAinda não há avaliações
- Vehicle Charging SystemDocumento28 páginasVehicle Charging SystemAin Mastura Burhanudin100% (1)
- GD300 16 Inverter For HVAC Operation Manual V2 0Documento136 páginasGD300 16 Inverter For HVAC Operation Manual V2 0Ngọc Thiện NguyễnAinda não há avaliações
- Huawei Emu: by Jefferson SimarmataDocumento17 páginasHuawei Emu: by Jefferson SimarmataRZAinda não há avaliações
- 2006 18 Spring Wiring Matters Power Factor Correction PFCDocumento3 páginas2006 18 Spring Wiring Matters Power Factor Correction PFCArsyad Harus SemangattAinda não há avaliações
- Assignment No 2Documento3 páginasAssignment No 2Ali NawazAinda não há avaliações
- Gazette Notice - Shedule of Tarrifs For The Supply of Electrical Energy by KPLC PDFDocumento7 páginasGazette Notice - Shedule of Tarrifs For The Supply of Electrical Energy by KPLC PDFgeraldmrkAinda não há avaliações
- 2 GENSET Rating ChartDocumento2 páginas2 GENSET Rating ChartAnbuAinda não há avaliações
- Load Flow - CompleteDocumento24 páginasLoad Flow - CompleteJohn Cristouv CortezAinda não há avaliações
- Semikron Datasheet SKKT 106 07897471Documento4 páginasSemikron Datasheet SKKT 106 07897471Ibrahim Al-AssraAinda não há avaliações
- Renewable Energy Act of 2008Documento14 páginasRenewable Energy Act of 2008Vangie MontalboAinda não há avaliações
- Alternating Current CircuitsDocumento4 páginasAlternating Current CircuitsCris Diane G. DatingginooAinda não há avaliações