Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Building Thermal EnvelopeDocumento246 páginasBuilding Thermal Envelopevinicius carriãoAinda não há avaliações
- Cooling Tower CalculationDocumento4 páginasCooling Tower CalculationAnonymous 7CnrWpzZf1Ainda não há avaliações
- PartDocumento27 páginasPartaqibazizkhanAinda não há avaliações
- Spacecraft Design and Mission OperationsDocumento10 páginasSpacecraft Design and Mission OperationsDavid GaleaAinda não há avaliações
- Mep Method StatementDocumento2 páginasMep Method StatementIm Chinith50% (2)
- Heat Pump Combi Unit Pkom: Comfort VentilationDocumento16 páginasHeat Pump Combi Unit Pkom: Comfort Ventilationsbattina100% (1)
- Fiche Technique Unité Roof TopDocumento29 páginasFiche Technique Unité Roof TopKirill NôstaliônAinda não há avaliações
- Bush MisleadDocumento23 páginasBush MisleadDavid GaleaAinda não há avaliações
- Australia Letter To Ministers For Japan WhalingDocumento1 páginaAustralia Letter To Ministers For Japan WhalingDavid GaleaAinda não há avaliações
- Analytical Thinking TrainingDocumento58 páginasAnalytical Thinking Trainingcyberhansraj100% (2)
- 01 Australian Bioenergy RoadmapDocumento44 páginas01 Australian Bioenergy RoadmapDavid GaleaAinda não há avaliações
- Constructivism in Science Teacher TrainingDocumento10 páginasConstructivism in Science Teacher TrainingDavid GaleaAinda não há avaliações
- SpaceCraft Data Systems Hardware PracticesDocumento6 páginasSpaceCraft Data Systems Hardware PracticesDavid GaleaAinda não há avaliações
- Spacecraft Design Structure OpsDocumento24 páginasSpacecraft Design Structure OpsDavid GaleaAinda não há avaliações
- Design and Fabrication of Indexing Drill Jig For Cylindrical Work PiecesDocumento52 páginasDesign and Fabrication of Indexing Drill Jig For Cylindrical Work PiecesRama KrishnaAinda não há avaliações
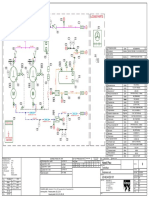
- Anexo 4.2 Diagrama Del Conexionado de La Central FigorificaDocumento1 páginaAnexo 4.2 Diagrama Del Conexionado de La Central FigorificaGustavo HidalgoAinda não há avaliações
- Numerical investigation on uneven heat transfer processes inside a piston galleryDocumento12 páginasNumerical investigation on uneven heat transfer processes inside a piston gallerymirage_et_rafale9572Ainda não há avaliações
- Heat 4e Chap03 LectureDocumento51 páginasHeat 4e Chap03 LectureAbhijit Kushwaha100% (1)
- RECUPERATOR DE CALDURA-Tangra-EVB-PP-04-V-Fisa - Tehnica PDFDocumento12 páginasRECUPERATOR DE CALDURA-Tangra-EVB-PP-04-V-Fisa - Tehnica PDFDana LoreAinda não há avaliações
- UL Standards@@ For Airxchange WheelsDocumento1 páginaUL Standards@@ For Airxchange Wheelsseyyed jamal mirjaliliAinda não há avaliações
- Heat Transfer and Exergy Analysis of A Spiral Heat ExchangerDocumento16 páginasHeat Transfer and Exergy Analysis of A Spiral Heat ExchangerManuela AguirreAinda não há avaliações
- Optional Lecture 3: Wall Boiling Models: 16.0 ReleaseDocumento56 páginasOptional Lecture 3: Wall Boiling Models: 16.0 ReleasemAinda não há avaliações
- Luwa DetailsDocumento1 páginaLuwa DetailsZaka Zaheeri100% (1)
- Pnacj953 PDFDocumento395 páginasPnacj953 PDFSwaroop KumarAinda não há avaliações
- Efficient Regenerative Steam CycleDocumento9 páginasEfficient Regenerative Steam CycleJon Vincent BallesteroAinda não há avaliações
- TC/TG/TRG Minutes Cover SheetDocumento10 páginasTC/TG/TRG Minutes Cover SheetJasmine TuasonAinda não há avaliações
- Advances in High-Performance CoolingDocumento15 páginasAdvances in High-Performance Coolingygrao100% (1)
- AIC Tech Praval PDFDocumento21 páginasAIC Tech Praval PDFgetashishvaidAinda não há avaliações
- Heat Transfer WorksheetDocumento2 páginasHeat Transfer WorksheetjcsdyobiAinda não há avaliações
- Summary of Your Configuration"Duo Ec2 Ventilclima 14.11.2019"Documento6 páginasSummary of Your Configuration"Duo Ec2 Ventilclima 14.11.2019"daniel ventilclimainstalAinda não há avaliações
- Main Paper Rabas1981Documento22 páginasMain Paper Rabas1981Ankit LonareAinda não há avaliações
- CBSE Class 7 Science - HeatDocumento5 páginasCBSE Class 7 Science - Heatsiba padhyAinda não há avaliações
- ClimatologyDocumento61 páginasClimatologyVrushali ThokalAinda não há avaliações
- IISST Thermodynamics AssignmentDocumento2 páginasIISST Thermodynamics Assignmentkiruba karanAinda não há avaliações
- Film Boiling CondensationDocumento5 páginasFilm Boiling CondensationMohamad Fahmi Abd Rased100% (3)
- BasicGeko - Date Tehnice-VCVDocumento54 páginasBasicGeko - Date Tehnice-VCVLupu AlinAinda não há avaliações
- 42-Single Effect Evaporator-21-May-2021Material I 21-May-2021 Single Effect EvaporatorDocumento8 páginas42-Single Effect Evaporator-21-May-2021Material I 21-May-2021 Single Effect EvaporatorAbhishek KarpeAinda não há avaliações
- Design Methodology Bubbling Fluidized-Bed: For Small-ScaleDocumento19 páginasDesign Methodology Bubbling Fluidized-Bed: For Small-ScaleDanielle BarkerAinda não há avaliações