Você também pode gostar
- Us 20140367201Documento16 páginasUs 20140367201Victor Von DoomAinda não há avaliações
- United States: (12) Patent Application Publication (10) Pub. No.: US 2014/0183875 A1Documento21 páginasUnited States: (12) Patent Application Publication (10) Pub. No.: US 2014/0183875 A1Victor Von DoomAinda não há avaliações
- Us 20140119487Documento16 páginasUs 20140119487Victor Von DoomAinda não há avaliações
- Original Filing - Assumed Name? PDFDocumento2 páginasOriginal Filing - Assumed Name? PDFLouis JoeAinda não há avaliações
- Us 20140119487Documento16 páginasUs 20140119487Victor Von DoomAinda não há avaliações
- Us 20140319933Documento21 páginasUs 20140319933Victor Von DoomAinda não há avaliações
- Us 20130261420Documento12 páginasUs 20130261420Victor Von DoomAinda não há avaliações
- EEG Data Analysis Methods and SystemsDocumento80 páginasEEG Data Analysis Methods and SystemsVictor Von DoomAinda não há avaliações
- Us 20140035435Documento41 páginasUs 20140035435Victor Von DoomAinda não há avaliações
- Us 20130093261Documento11 páginasUs 20130093261Victor Von DoomAinda não há avaliações
- Us 20130292944Documento11 páginasUs 20130292944Victor Von DoomAinda não há avaliações
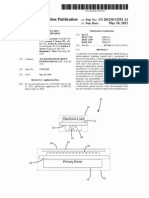
- A Gravito-Electric Power Generating Unit: (19) United StatesDocumento11 páginasA Gravito-Electric Power Generating Unit: (19) United StatesVictor Von DoomAinda não há avaliações
- Us 20120168676Documento3 páginasUs 20120168676Victor Von DoomAinda não há avaliações
- Us 20120112552Documento43 páginasUs 20120112552Victor Von DoomAinda não há avaliações
- Us 20130162463Documento12 páginasUs 20130162463Victor Von DoomAinda não há avaliações
- Us 20130261420Documento12 páginasUs 20130261420Victor Von DoomAinda não há avaliações
- Method and device for direct nuclear energy conversionDocumento54 páginasMethod and device for direct nuclear energy conversionVictor Von DoomAinda não há avaliações
- Us 454622Documento5 páginasUs 454622Victor Von DoomAinda não há avaliações
- Us 20040070299Documento3 páginasUs 20040070299Victor Von Doom100% (1)
- TEPZZ 6798 A - T: European Patent ApplicationDocumento28 páginasTEPZZ 6798 A - T: European Patent ApplicationVictor Von DoomAinda não há avaliações
- Us 4831627Documento5 páginasUs 4831627Victor Von DoomAinda não há avaliações
- Us 8564148Documento16 páginasUs 8564148Victor Von DoomAinda não há avaliações
- Us 20110316678Documento13 páginasUs 20110316678Victor Von DoomAinda não há avaliações
- Us 20120112552Documento43 páginasUs 20120112552Victor Von DoomAinda não há avaliações
- Us 593138Documento4 páginasUs 593138Victor Von DoomAinda não há avaliações
- Patent DE102006024610A1 - Ballistic Two-Dimensional Electron-Defect Electron-Energy System, Has ..Documento94 páginasPatent DE102006024610A1 - Ballistic Two-Dimensional Electron-Defect Electron-Energy System, Has ..Victor Von DoomAinda não há avaliações
- Us 20120090534Documento28 páginasUs 20120090534Victor Von DoomAinda não há avaliações
- Patent DE102004060871A1 - Force Field E.G. Nuclear Energy, Strengthening, Weakening and Canceling ..Documento12 páginasPatent DE102004060871A1 - Force Field E.G. Nuclear Energy, Strengthening, Weakening and Canceling ..Victor Von DoomAinda não há avaliações
- Patent CN102996383A - Micro Laser Engine - Google PatentsDocumento2 páginasPatent CN102996383A - Micro Laser Engine - Google PatentsVictor Von DoomAinda não há avaliações
- Patent CN201418837Y - Biological Quantum Balancing Cabin - Google PatentsDocumento3 páginasPatent CN201418837Y - Biological Quantum Balancing Cabin - Google PatentsVictor Von DoomAinda não há avaliações
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Tropical Pacific Invertebrata PDFDocumento305 páginasTropical Pacific Invertebrata PDFhanif amirusdiAinda não há avaliações
- Chapter 02 - Position On The EarthDocumento10 páginasChapter 02 - Position On The EarthIludiran Kola100% (1)
- The Masonic Lodge Floor ExplainedDocumento15 páginasThe Masonic Lodge Floor ExplainedAnonymous 8XzMa4pZAinda não há avaliações
- Scott Onstott - Taking Measure - Explorations in Number, Architecture and Consciousness PDFDocumento130 páginasScott Onstott - Taking Measure - Explorations in Number, Architecture and Consciousness PDFpep100% (1)
- FAO Fisheries & Aquaculture - FAO Major Fishing Areas - ATLANTIC, SOUTHWEST (Major Fishing Area 41) PDFDocumento4 páginasFAO Fisheries & Aquaculture - FAO Major Fishing Areas - ATLANTIC, SOUTHWEST (Major Fishing Area 41) PDFZoran TevdovskiAinda não há avaliações
- The Great Pyramids - Hidden Manifest (Eng)Documento47 páginasThe Great Pyramids - Hidden Manifest (Eng)Vio LotyAinda não há avaliações
- General NavigationDocumento163 páginasGeneral NavigationYahya Yıldırım95% (21)
- Grade 8 Geography Term 1Documento10 páginasGrade 8 Geography Term 1plaatjiesinazo15Ainda não há avaliações
- General Mathematics NotesDocumento25 páginasGeneral Mathematics NotesKatrina MaeAinda não há avaliações
- Questions 14-26: The Coriolis ForceDocumento5 páginasQuestions 14-26: The Coriolis ForceJorgeChahin100% (1)
- Satellite Orbit ParametersDocumento72 páginasSatellite Orbit Parametersshahabniazi100% (3)
- Chap 8 Elec BookDocumento21 páginasChap 8 Elec Bookapi-236985388Ainda não há avaliações
- WWW Quora Com What Is A Geostationary and Why Is It at 35 786 KMDocumento2 páginasWWW Quora Com What Is A Geostationary and Why Is It at 35 786 KMJournal ArtAinda não há avaliações
- Lesson Plan For COTDocumento5 páginasLesson Plan For COTKB Paano100% (2)
- How Latitude, Altitude, Distance from Ocean & Other Factors Affect ClimateDocumento13 páginasHow Latitude, Altitude, Distance from Ocean & Other Factors Affect Climatejoan marie Pelias100% (1)
- 6geography PDFDocumento81 páginas6geography PDFSaket Deshmukh100% (1)
- CBSE Class 6 Geography Notes Chapter 2 - Globe Latitudes and LongitudesDocumento3 páginasCBSE Class 6 Geography Notes Chapter 2 - Globe Latitudes and Longitudesdhivya sankarAinda não há avaliações
- Air DensityDocumento24 páginasAir DensityPraphulAinda não há avaliações
- Measurement of Distance and Direction PDFDocumento9 páginasMeasurement of Distance and Direction PDFShoaib hossain100% (1)
- Earth Science 104 Earth System Science I Laboratory Manual: Fall 2007Documento110 páginasEarth Science 104 Earth System Science I Laboratory Manual: Fall 2007Raja LaikopanAinda não há avaliações
- Earth at GlanceDocumento2 páginasEarth at GlanceJavaid Ali ShahAinda não há avaliações
- DT 14 - Air NavigationDocumento16 páginasDT 14 - Air NavigationMarcelo MartinsAinda não há avaliações
- Stigler 2016Documento108 páginasStigler 2016Nazanin GhasemiAinda não há avaliações
- (Biomes of The Earth) Peter D. Moore, Richard Garratt - Wetlands-Chelsea House Publications (2006)Documento241 páginas(Biomes of The Earth) Peter D. Moore, Richard Garratt - Wetlands-Chelsea House Publications (2006)Maria DindareanuAinda não há avaliações
- CH 11 World Locations and TimesDocumento34 páginasCH 11 World Locations and TimesHarry White100% (1)
- Foucault Pendulum-RH5001A53 Atish Kumar PHY 104Documento14 páginasFoucault Pendulum-RH5001A53 Atish Kumar PHY 104Atish KumarAinda não há avaliações
- Africa, Land of Contrasts RDocumento17 páginasAfrica, Land of Contrasts RlpaszkeAinda não há avaliações
- Glosario Polen PDFDocumento81 páginasGlosario Polen PDFjrodjuanAinda não há avaliações
- Science 7 Q4 SLM2Documento14 páginasScience 7 Q4 SLM2Seen Tuna-dough50% (2)
- Celestial Navigation BasicsDocumento30 páginasCelestial Navigation BasicsroselleAinda não há avaliações