Você também pode gostar
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionNo EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionAinda não há avaliações
- Motion Control With LabviewDocumento30 páginasMotion Control With Labviewsocat120013485Ainda não há avaliações
- CNC CAM Lecture Notes Chapter 3 InterpolatorDocumento32 páginasCNC CAM Lecture Notes Chapter 3 InterpolatorSutran ErwiyantoroAinda não há avaliações
- Real Time Operating System A Complete Guide - 2020 EditionNo EverandReal Time Operating System A Complete Guide - 2020 EditionAinda não há avaliações
- Industrial Automation Industrial Automation: Cad/Cam and CNCDocumento24 páginasIndustrial Automation Industrial Automation: Cad/Cam and CNCGuillermo RamirezAinda não há avaliações
- Design and Implementation of 3 Axis Linear Interpolation Controller in Fpga For CNC Machines and RoboticsDocumento11 páginasDesign and Implementation of 3 Axis Linear Interpolation Controller in Fpga For CNC Machines and RoboticsIAEME Publication100% (1)
- 080 Manipulator Trajectory PlanningDocumento23 páginas080 Manipulator Trajectory PlanningJohan RojasAinda não há avaliações
- SeminarDocumento29 páginasSeminarMohan UrsAinda não há avaliações
- Ch13Documento28 páginasCh13Faiza BadarAinda não há avaliações
- 67047-Ch14 BaruDocumento48 páginas67047-Ch14 BaruDanielAinda não há avaliações
- Robot Trajectory PlanningDocumento15 páginasRobot Trajectory PlanningKoteswara RaoAinda não há avaliações
- LTCC and HTCC PDFDocumento3 páginasLTCC and HTCC PDFPhan Xuân TuấnAinda não há avaliações
- Motion Control System Information PDFDocumento349 páginasMotion Control System Information PDFJose ValenciaAinda não há avaliações
- Computer Graphics Question BankDocumento7 páginasComputer Graphics Question Bankniranjani0408Ainda não há avaliações
- Part Iii Material Handling and Identification TechnologiesDocumento50 páginasPart Iii Material Handling and Identification TechnologiesTooling ganeshAinda não há avaliações
- Groover Ch7 Numerical ControlDocumento65 páginasGroover Ch7 Numerical Controlrony100% (1)
- Unit 6 - Automated Storage and Retrieval SystemsDocumento11 páginasUnit 6 - Automated Storage and Retrieval Systemssri7877Ainda não há avaliações
- Review of Control Systems in RoboticsDocumento10 páginasReview of Control Systems in Roboticsroyson316Ainda não há avaliações
- Computer Aided Metrology PrinciplesDocumento3 páginasComputer Aided Metrology PrinciplesramptechAinda não há avaliações
- CNC Look Ahead S ShapeDocumento13 páginasCNC Look Ahead S ShapeinsaninsideAinda não há avaliações
- Introduction to Mobile Robot Motion PlanningDocumento151 páginasIntroduction to Mobile Robot Motion Planningvarun_bluejayAinda não há avaliações
- Open Loop and Close Loop Control SystemDocumento10 páginasOpen Loop and Close Loop Control SystemAmrit SinghaAinda não há avaliações
- Elements of Industrial Automation Week 06 NotesDocumento9 páginasElements of Industrial Automation Week 06 NotesThanmay JSAinda não há avaliações
- SPM Chapter5Documento63 páginasSPM Chapter5KidusAinda não há avaliações
- DMS QB 2015 RDocumento8 páginasDMS QB 2015 RKeerthe VaasanAinda não há avaliações
- Mac OS X CPU SchedulingDocumento21 páginasMac OS X CPU Schedulingyeyow :v0% (2)
- Robot Motion Planning: Approaches and Research IssuesDocumento26 páginasRobot Motion Planning: Approaches and Research IssuesRahul KalaAinda não há avaliações
- CIM Guide: Computer Integrated Manufacturing Processes ExplainedDocumento32 páginasCIM Guide: Computer Integrated Manufacturing Processes ExplainedVarshaAinda não há avaliações
- Building Automation Sample PapersDocumento4 páginasBuilding Automation Sample Papersrashmi patilAinda não há avaliações
- FactoryflowDocumento54 páginasFactoryflowh_eijy2743Ainda não há avaliações
- OPC Based Distributed Real Time Simulation of Complex Continuous ProcessesDocumento25 páginasOPC Based Distributed Real Time Simulation of Complex Continuous Processessina20795Ainda não há avaliações
- Control Systems and Instrumentation Lab GuideDocumento3 páginasControl Systems and Instrumentation Lab GuideskrtamilAinda não há avaliações
- Intelligent VehicleDocumento16 páginasIntelligent VehicleSaurav SumanAinda não há avaliações
- Inter Intra Vehicle Wireless CommunicationDocumento20 páginasInter Intra Vehicle Wireless CommunicationSuhi TeoAinda não há avaliações
- Siemens S7 PLC Error TroubleshootingDocumento27 páginasSiemens S7 PLC Error TroubleshootingSofiane BenseghirAinda não há avaliações
- What Is Parallel ProcessingDocumento4 páginasWhat Is Parallel ProcessingHarryAinda não há avaliações
- Remote Media Immersion ReportDocumento17 páginasRemote Media Immersion ReportNivedita NautiyalAinda não há avaliações
- CBM Implementation for Underground CablesDocumento4 páginasCBM Implementation for Underground Cables__kami__Ainda não há avaliações
- Lecture 8 Robot Control StudentDocumento52 páginasLecture 8 Robot Control StudentMustafa BüyükAinda não há avaliações
- DMS UNIT I QB Answ KeyDocumento31 páginasDMS UNIT I QB Answ KeyRahul Valath100% (1)
- CH 9 - Discrete Control Using PLC's and PC'sDocumento22 páginasCH 9 - Discrete Control Using PLC's and PC'sTehseenakhtarAinda não há avaliações
- Assignment 2010Documento6 páginasAssignment 2010Rafael BarriosAinda não há avaliações
- ME 1402 - Mechatronics PDFDocumento6 páginasME 1402 - Mechatronics PDFnagarajanceAinda não há avaliações
- Robot Drive Systems & End EffectorsDocumento71 páginasRobot Drive Systems & End EffectorsbabuAinda não há avaliações
- Sliding Mode Control of DC MotorDocumento5 páginasSliding Mode Control of DC MotorPham Quoc ThienAinda não há avaliações
- Moradizadeh Hasan 200309484 MASC ISE Fall2014Documento129 páginasMoradizadeh Hasan 200309484 MASC ISE Fall2014whmidi7331Ainda não há avaliações
- Automation in Manufacturing 10ME757: Department of Mechanical Engineering, SIRMVIT (Ramesh C G & Hanamantraygouda M B)Documento193 páginasAutomation in Manufacturing 10ME757: Department of Mechanical Engineering, SIRMVIT (Ramesh C G & Hanamantraygouda M B)Wtf rajuAinda não há avaliações
- Me6702 Mechatronics Unit 4Documento23 páginasMe6702 Mechatronics Unit 4Niyas AhamedAinda não há avaliações
- Fundamentals of Mechatronics Short CourseDocumento3 páginasFundamentals of Mechatronics Short CourseAamir Hasan KhanAinda não há avaliações
- Nano Satellite: Seminar Report OnDocumento27 páginasNano Satellite: Seminar Report OnShishu Priya Darshi YadavAinda não há avaliações
- PID Controller With Feedforward Low Pass Filters For Permanent Magnet Stepper MotorsDocumento4 páginasPID Controller With Feedforward Low Pass Filters For Permanent Magnet Stepper Motorsprateek agarwalAinda não há avaliações
- What Is Servo Motor Servomotor: Rotary Actuator Linear ActuatorDocumento11 páginasWhat Is Servo Motor Servomotor: Rotary Actuator Linear ActuatorThe-kiros HadushAinda não há avaliações
- Physics KinematicsDocumento34 páginasPhysics KinematicsSammasterzAinda não há avaliações
- DS1104 R&D Controller Board: SpaceDocumento8 páginasDS1104 R&D Controller Board: SpaceViet NguyenAinda não há avaliações
- USM Machining Guide: Principles, Parameters, Applications & Case StudiesDocumento29 páginasUSM Machining Guide: Principles, Parameters, Applications & Case StudiesAnonymous ML4hh4MOyBAinda não há avaliações
- Traffic Light ControllerDocumento3 páginasTraffic Light ControllerSyed Muzahir AliAinda não há avaliações
- Computer Network Lecture NotesDocumento30 páginasComputer Network Lecture NotesAshish ThapaAinda não há avaliações
- Design & Implementation of Mamdani Fuzzy Inference System On An Automatic Train Braking SystemDocumento5 páginasDesign & Implementation of Mamdani Fuzzy Inference System On An Automatic Train Braking SystemijsretAinda não há avaliações
- Combining AHP and TOPSIS Approaches To Support Site SelectionDocumento8 páginasCombining AHP and TOPSIS Approaches To Support Site SelectionFouad ElhajjiAinda não há avaliações
- A Course On Wireless Sensor Networks (WSNS)Documento116 páginasA Course On Wireless Sensor Networks (WSNS)Fouad ElhajjiAinda não há avaliações
- Zigbee Based Wireless Sensor and Actuator Network For Service Robot Intelligent Space PDFDocumento8 páginasZigbee Based Wireless Sensor and Actuator Network For Service Robot Intelligent Space PDFFouad ElhajjiAinda não há avaliações
- Complex Networks Traffic Dynamics, Network Performance, and Network Structure PDFDocumento9 páginasComplex Networks Traffic Dynamics, Network Performance, and Network Structure PDFFouad ElhajjiAinda não há avaliações
- MCDM MethodsDocumento14 páginasMCDM MethodsFouad ElhajjiAinda não há avaliações
- Using Centrality-Based Power Control For Hot-Spot Mitigation in Wireless Networks PDFDocumento6 páginasUsing Centrality-Based Power Control For Hot-Spot Mitigation in Wireless Networks PDFFouad ElhajjiAinda não há avaliações
- Routing Techniques in Wireless Sensor NetworksDocumento107 páginasRouting Techniques in Wireless Sensor NetworksFouad ElhajjiAinda não há avaliações
- A Chain-Based Routing Protocol To Maximize The Lifetime of Wireless Sensor Networks PDFDocumento5 páginasA Chain-Based Routing Protocol To Maximize The Lifetime of Wireless Sensor Networks PDFFouad ElhajjiAinda não há avaliações
- Centrality-Based Power Control For Hot-Spot Mitigation in Multi-Hop Wireless Networks PDFDocumento12 páginasCentrality-Based Power Control For Hot-Spot Mitigation in Multi-Hop Wireless Networks PDFFouad ElhajjiAinda não há avaliações
- Motion Control Basics PDFDocumento8 páginasMotion Control Basics PDFFouad ElhajjiAinda não há avaliações
- University Hassan II Mohammedia – Casablanca National School of Business and Management Casablanca Japan VS American CultureDocumento25 páginasUniversity Hassan II Mohammedia – Casablanca National School of Business and Management Casablanca Japan VS American CultureFouad ElhajjiAinda não há avaliações
- Multi-Criteria Routing in Wireless Sensor-Based Pervasive Environments PDFDocumento14 páginasMulti-Criteria Routing in Wireless Sensor-Based Pervasive Environments PDFFouad ElhajjiAinda não há avaliações
- Amplificateur Push PullDocumento2 páginasAmplificateur Push PullFouad ElhajjiAinda não há avaliações
- Nema mg-1 2009Documento671 páginasNema mg-1 2009DinuAinda não há avaliações
- Three Phase Induction Motor ExperimentDocumento21 páginasThree Phase Induction Motor ExperimentKarthik GanjiAinda não há avaliações
- Modeling Vibration in an Induction MotorDocumento38 páginasModeling Vibration in an Induction MotorYasi YamuAinda não há avaliações
- Three Phase Induct Ioin Motor Test AhmedDocumento10 páginasThree Phase Induct Ioin Motor Test AhmedSinggih AgustianAinda não há avaliações
- FDY Equipment maintenance and attention on Hot Godet sectionDocumento21 páginasFDY Equipment maintenance and attention on Hot Godet sectionnajme mohammadiAinda não há avaliações
- S - Ind-Me-08-Eng-Eng-12-001 Rev000 300 Hrs Maintenance InstructionDocumento21 páginasS - Ind-Me-08-Eng-Eng-12-001 Rev000 300 Hrs Maintenance InstructionDeepakAinda não há avaliações
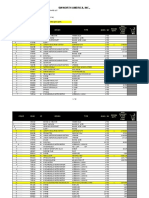
- SW North America, Inc.,: Recommended Spare PartsDocumento16 páginasSW North America, Inc.,: Recommended Spare Partsmeinandacahyani salsabilaAinda não há avaliações
- Thesis Omar JasimDocumento280 páginasThesis Omar JasimkfaliAinda não há avaliações
- Satya Seminar TopicDocumento18 páginasSatya Seminar TopicSatya raoAinda não há avaliações
- Selection of Induction Motors For Industrial Applications Part 1Documento5 páginasSelection of Induction Motors For Industrial Applications Part 1shadi22Ainda não há avaliações
- Smart Crop Protection System From Living Objects and Fire Using ArduinoDocumento5 páginasSmart Crop Protection System From Living Objects and Fire Using Arduinovaibhav tambe100% (1)
- Generator ProtectionDocumento41 páginasGenerator Protectionwaseem100% (1)
- Energy Efficiency Improvement of Electric Machines Without RareEarth MagnetsDocumento196 páginasEnergy Efficiency Improvement of Electric Machines Without RareEarth MagnetsKarla AlvarezAinda não há avaliações
- Generator Operation Manual QN1 SEC G 04 TP 004Documento187 páginasGenerator Operation Manual QN1 SEC G 04 TP 004Bui Vanluong100% (2)
- Cat IiDocumento72 páginasCat Iizeroseya100% (2)
- Industrial Power Systems Handbook PDFDocumento987 páginasIndustrial Power Systems Handbook PDFpadmajasivaAinda não há avaliações
- Proposal for a 2 MW Steam Turbine Generator SetDocumento30 páginasProposal for a 2 MW Steam Turbine Generator SetRacem LoukilAinda não há avaliações
- Rotating Rectifier - TestDocumento10 páginasRotating Rectifier - TestDjebali Mourad100% (1)
- Induction MotorDocumento18 páginasInduction MotorabusyamsiAinda não há avaliações
- 110 TOP Single Phase Induction Motors - Electrical Engineering Multiple Choice Questions and Answers - MCQs Preparation For Engineering Competitive ExamsDocumento42 páginas110 TOP Single Phase Induction Motors - Electrical Engineering Multiple Choice Questions and Answers - MCQs Preparation For Engineering Competitive Examsvijay_marathe01Ainda não há avaliações
- Pathfinder HandbookDocumento82 páginasPathfinder HandbookBill HerbenAinda não há avaliações
- Lsa 36 - 4-Pole - Single-Phase: AlternatorsDocumento15 páginasLsa 36 - 4-Pole - Single-Phase: AlternatorsJulio IllanesAinda não há avaliações
- Internship ReportDocumento59 páginasInternship ReportSHIRISH KAinda não há avaliações
- Wind Turbine ManualDocumento19 páginasWind Turbine Manualwizardgrt1Ainda não há avaliações
- Double Revolving Flux Theory ExplainedDocumento1 páginaDouble Revolving Flux Theory ExplainedSudipto PramanikAinda não há avaliações
- Generators and Transformers ExplainedDocumento31 páginasGenerators and Transformers Explainedibrahim fadelAinda não há avaliações
- Generator VibrationDocumento4 páginasGenerator VibrationsatyandaruAinda não há avaliações
- 6329 PBDocumento72 páginas6329 PBNguyen Van QuyenAinda não há avaliações
- Mid-I BitsDocumento12 páginasMid-I BitspragatinareshAinda não há avaliações
- KOD: JA 505 Kursus: Automotive Electronics Program: DAD5-S2Documento32 páginasKOD: JA 505 Kursus: Automotive Electronics Program: DAD5-S2Muhammad Zainul Abidin100% (1)