Você também pode gostar
- Clock Encoder CuadraturaDocumento4 páginasClock Encoder CuadraturaSergio ValderramaAinda não há avaliações
- Practica No2 E4Documento7 páginasPractica No2 E4mariovasAinda não há avaliações
- Arreglos de AntenasDocumento18 páginasArreglos de AntenasTatiana Marz AlvarezAinda não há avaliações
- Proyecto Comunicaciones 2 2s 2014Documento9 páginasProyecto Comunicaciones 2 2s 2014Alex EstradaAinda não há avaliações
- Practica No1 E4Documento4 páginasPractica No1 E4mariovasAinda não há avaliações
- Direccionamiento m4Documento5 páginasDireccionamiento m4mariovasAinda não há avaliações
- Barrera infrarroja manualDocumento12 páginasBarrera infrarroja manualRuben Figueroa LAinda não há avaliações
- Proyecto E6 - 2s 2014 PDFDocumento3 páginasProyecto E6 - 2s 2014 PDFmariovasAinda não há avaliações
- Electr PotenciaDocumento12 páginasElectr PotenciamariovasAinda não há avaliações
- Examen Modulo4 Final PDFDocumento16 páginasExamen Modulo4 Final PDFmariovasAinda não há avaliações
- Series de Funciones y FourierDocumento41 páginasSeries de Funciones y FourierManuel A. SánchezAinda não há avaliações
- Tarea Preparatoria2doparcialDocumento2 páginasTarea Preparatoria2doparcialmariovasAinda não há avaliações
- CCNA 4.0 LABS. MODULO 2 ERouting - ILM - v40Documento367 páginasCCNA 4.0 LABS. MODULO 2 ERouting - ILM - v40loadmasther100% (4)
- Capitulo 6 Microprocesador Z80Documento14 páginasCapitulo 6 Microprocesador Z80mariovasAinda não há avaliações
- Manual Boole DeustoDocumento21 páginasManual Boole DeustoCharles WilsonAinda não há avaliações
- SBDZ Fuente PDFDocumento1 páginaSBDZ Fuente PDFNelson JaraAinda não há avaliações
- Tarea Preparatoria2doparcialDocumento2 páginasTarea Preparatoria2doparcialmariovasAinda não há avaliações
- Proyecto E1Documento1 páginaProyecto E1mariovasAinda não há avaliações
- 555Documento8 páginas555mariovasAinda não há avaliações
- Tutorial de Statistix-Primera ParteDocumento18 páginasTutorial de Statistix-Primera ParteErii ArAinda não há avaliações
- Manual de AntivirusDocumento48 páginasManual de AntivirusMoises Cruz CardenasAinda não há avaliações
- 3.1 Informe Movimiento de Participantes Convenio 04-0020-Aii-06 PDFDocumento1 página3.1 Informe Movimiento de Participantes Convenio 04-0020-Aii-06 PDFEnrique LunaAinda não há avaliações
- Evaluacion 2 - AC - Deloitte-CyberAcademy - Paso A Paso Desafio 1Documento10 páginasEvaluacion 2 - AC - Deloitte-CyberAcademy - Paso A Paso Desafio 1Daniel Eduardo Letelier MunozAinda não há avaliações
- Actividad Modelos de ProgramaciónDocumento15 páginasActividad Modelos de ProgramaciónPaola VelaAinda não há avaliações
- Examen FINALDocumento28 páginasExamen FINALRoberto Rojo Del PradoAinda não há avaliações
- Como Quitar Protección de Escritura en Tu USBDocumento41 páginasComo Quitar Protección de Escritura en Tu USBAlexAinda não há avaliações
- Fo-Qu-03 Listado Maestro Documentos ManufacturaDocumento3 páginasFo-Qu-03 Listado Maestro Documentos ManufacturaalixAinda não há avaliações
- El Uso de Las Tic en La Vida CotidianaDocumento5 páginasEl Uso de Las Tic en La Vida Cotidianajp Ramírez NavaAinda não há avaliações
- UCHP GuíaDocumento22 páginasUCHP GuíaAnthony PozoAinda não há avaliações
- ITGSM13 - Carlos Manuel FernandezDocumento46 páginasITGSM13 - Carlos Manuel Fernandezbonilla03Ainda não há avaliações
- Diseño digital con VHDL en el Instituto Tecnológico de MinatitlánDocumento23 páginasDiseño digital con VHDL en el Instituto Tecnológico de MinatitlánmaricelaAinda não há avaliações
- Historia y aplicaciones PLCDocumento8 páginasHistoria y aplicaciones PLCDiego MesaAinda não há avaliações
- Sistema Scada SiemensDocumento12 páginasSistema Scada SiemenswilsonAinda não há avaliações
- Gestor Agrícola App GuíaDocumento31 páginasGestor Agrícola App GuíaDarwin JucAinda não há avaliações
- Guia para Elaborar El Poryecto de InvestigaciónDocumento23 páginasGuia para Elaborar El Poryecto de InvestigaciónLolaAinda não há avaliações
- 1 - Exp - Planificador Matematicas Ediciones CastilloDocumento10 páginas1 - Exp - Planificador Matematicas Ediciones Castillodiway360100% (1)
- Títulos y Subtítulos Con Estilo APADocumento13 páginasTítulos y Subtítulos Con Estilo APAMartin Vera EspadasAinda não há avaliações
- SoftwareDocumento4 páginasSoftwareRosa GonzálezAinda não há avaliações
- Mejoramiento y ampliación de los servicios profesionales en la Universidad Nacional Intercultural de la Selva CentralDocumento1 páginaMejoramiento y ampliación de los servicios profesionales en la Universidad Nacional Intercultural de la Selva Centralozelwill5388Ainda não há avaliações
- Actividades Taller. AUTOGESTIVODocumento6 páginasActividades Taller. AUTOGESTIVOBlanca Rosa Vargas de la Paz100% (1)
- INTRODUCCIÓN Objetivos y Conclusiones y RecomendacionesDocumento7 páginasINTRODUCCIÓN Objetivos y Conclusiones y RecomendacionesLeonardo Bazan VasquezAinda não há avaliações
- Lecture 5 Substation Automation Systems - En.esDocumento20 páginasLecture 5 Substation Automation Systems - En.esGianfranco Efrain AurisAinda não há avaliações
- GSSolutionsGuide SpanishDocumento19 páginasGSSolutionsGuide Spanishjose luis facundo flores aguileraAinda não há avaliações
- Unidad 6 Paso 7Documento27 páginasUnidad 6 Paso 7Carlos Motta100% (1)
- Transmission Line ArresterDocumento8 páginasTransmission Line ArresterJose Luis Ortega100% (1)
- Excepc I OnesDocumento23 páginasExcepc I OnesVinicio JairAinda não há avaliações
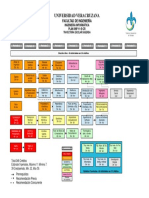
- Trayectoria escolar Ingeniería InformáticaDocumento1 páginaTrayectoria escolar Ingeniería InformáticaDiana UscangaAinda não há avaliações
- Politicas Aplicadas en Las Maquinas Virtuales2Documento11 páginasPoliticas Aplicadas en Las Maquinas Virtuales2Adrian YesirAinda não há avaliações
- 17 Espera Hasta Que Se Activa Un Grupo de Entradas Digitales PDFDocumento3 páginas17 Espera Hasta Que Se Activa Un Grupo de Entradas Digitales PDFOmaira DulceyAinda não há avaliações