Você também pode gostar
- Design of V.R.BridgeDocumento15 páginasDesign of V.R.BridgeNadeem HassoonAinda não há avaliações
- MRL CatalogueDocumento30 páginasMRL CatalogueNadeem HassoonAinda não há avaliações
- 45 - (Systems) (18) Miscellaneous Examples On Systems (2016) PDFDocumento185 páginas45 - (Systems) (18) Miscellaneous Examples On Systems (2016) PDFNadeem HassoonAinda não há avaliações
- 4 Building Code Requirements For Structural Concrete (Aci 318-14) and Commentary (Aci 318R-14)Documento1 página4 Building Code Requirements For Structural Concrete (Aci 318-14) and Commentary (Aci 318R-14)Nadeem HassoonAinda não há avaliações
- Managing Your Building Automation SystemDocumento85 páginasManaging Your Building Automation SystemNadeem HassoonAinda não há avaliações
- Architectural Lighting - September October 2016Documento68 páginasArchitectural Lighting - September October 2016Nadeem HassoonAinda não há avaliações
- Baement Waterproofing With Integrated Control and Injection Backup SystemDocumento128 páginasBaement Waterproofing With Integrated Control and Injection Backup SystemNadeem Hassoon100% (1)
- By Default Program Will Start With Korean Interface See "Interface - Language - Change - JPG" For Info How To Change Language For English or OtherDocumento1 páginaBy Default Program Will Start With Korean Interface See "Interface - Language - Change - JPG" For Info How To Change Language For English or OtherNadeem HassoonAinda não há avaliações
- HangerDocumento1.088 páginasHangerNadeem HassoonAinda não há avaliações
- مهم PDFDocumento1 páginaمهم PDFNadeem HassoonAinda não há avaliações
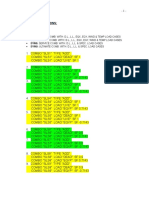
- Load CombinationsDocumento8 páginasLoad CombinationsNadeem HassoonAinda não há avaliações
- 3i Profile ArbicDocumento21 páginas3i Profile ArbicNadeem HassoonAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Midterm & Final ExamDocumento2 páginasMidterm & Final ExambcanturkyilmazAinda não há avaliações
- Thermal Methods of Analysis: Principles, Applications and ProblemsDocumento296 páginasThermal Methods of Analysis: Principles, Applications and ProblemsAthlur Sai KiranAinda não há avaliações
- Verification of Bernoulli's TheoremDocumento2 páginasVerification of Bernoulli's TheoremRamanaReddy Dareddy50% (2)
- Liquid Mass Diffusivity: - No Rigorous Theories - Diffusion As Molecules or Ions - Eyring Theory - Hydrodynamic TheoryDocumento27 páginasLiquid Mass Diffusivity: - No Rigorous Theories - Diffusion As Molecules or Ions - Eyring Theory - Hydrodynamic TheoryDiego KevinAinda não há avaliações
- Tugas Uts Termodinamika - Syarif KurrahmanDocumento3 páginasTugas Uts Termodinamika - Syarif KurrahmanSyarif KurrahmanAinda não há avaliações
- IO Summary - CPMDocumento4 páginasIO Summary - CPMapsinghformalAinda não há avaliações
- Sylomer Vibration PadsDocumento6 páginasSylomer Vibration PadsAnonymous IwqK1NlAinda não há avaliações
- Geotechnical Engineering - Ii (Foundation Engineering) : Standard Penetration TestDocumento14 páginasGeotechnical Engineering - Ii (Foundation Engineering) : Standard Penetration TestPascasio PascasioAinda não há avaliações
- Hognestad-A Study of Combined Bending and Axial Load in Reinforced Concrete MembersDocumento134 páginasHognestad-A Study of Combined Bending and Axial Load in Reinforced Concrete MembersJhonatan Sedano50% (2)
- CHE3161 - Semester1 - 2011 - SolutionsDocumento12 páginasCHE3161 - Semester1 - 2011 - Solutionsvenkiee50% (2)
- 1 - Design With Strut-And-tie Models - ExamplesDocumento5 páginas1 - Design With Strut-And-tie Models - ExamplespkrnAinda não há avaliações
- Added MassDocumento3 páginasAdded MassAli PungaAinda não há avaliações
- 01 - Heat Loss in Bare, Finned, & Lagged PipesDocumento17 páginas01 - Heat Loss in Bare, Finned, & Lagged PipesAllen Jerry AriesAinda não há avaliações
- Isentropic ProcessDocumento47 páginasIsentropic ProcessmahcilicacidAinda não há avaliações
- Vapor Pressure PDFDocumento8 páginasVapor Pressure PDFChri ShaAinda não há avaliações
- TOS VVI Objective Set 01Documento6 páginasTOS VVI Objective Set 01Rajesh Kumar SinghAinda não há avaliações
- Boiler Mountings and AccessoriesDocumento2 páginasBoiler Mountings and AccessoriesRabinAinda não há avaliações
- Drying of Solids LecturesDocumento32 páginasDrying of Solids LecturesHaider AliAinda não há avaliações
- Determination of Metracentric HeightDocumento5 páginasDetermination of Metracentric HeightArbel AcurilAinda não há avaliações
- Formulas, Constants, and ConversionsDocumento3 páginasFormulas, Constants, and ConversionsReymark NovecioAinda não há avaliações
- Hostel SECOND TERM EXAMINATIONDocumento6 páginasHostel SECOND TERM EXAMINATIONAlvan MmaduwubaAinda não há avaliações
- Complete GT Investigation Report Dt. 22.05.2013Documento26 páginasComplete GT Investigation Report Dt. 22.05.2013parvez100% (1)
- Standard and Actual Vapor Compression CycleDocumento19 páginasStandard and Actual Vapor Compression CycleJB LabraAinda não há avaliações
- Activity 5 Heats of Reactions AnswerDocumento6 páginasActivity 5 Heats of Reactions AnswerJohn Wilkins ToraynoAinda não há avaliações
- Evacuated TubeDocumento12 páginasEvacuated Tubeحسن كميت hassankomeit lAinda não há avaliações
- Crip LingDocumento24 páginasCrip LingMohamed NkAinda não há avaliações
- Pplied: ThermodynamicsDocumento86 páginasPplied: ThermodynamicsAlaa Shammaa100% (1)
- TD TBDocumento164 páginasTD TBsampath currentaffaairsAinda não há avaliações
- Gravity Wall (RCC) R0 (27!11!2017) 5m For TestingDocumento81 páginasGravity Wall (RCC) R0 (27!11!2017) 5m For TestingLandon MitchellAinda não há avaliações
- SAP2000 Analysis - Computers and Structures, IncDocumento6 páginasSAP2000 Analysis - Computers and Structures, IncshadabghazaliAinda não há avaliações