Você também pode gostar
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- MATLAB-to-Julia Translator KrasilnikovaDocumento8 páginasMATLAB-to-Julia Translator KrasilnikovarbernalMxAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- Neural Networks For Dengue Prediction: A Systematic ReviewDocumento16 páginasNeural Networks For Dengue Prediction: A Systematic ReviewrbernalMxAinda não há avaliações
- Dengue Risk LogisticaDocumento12 páginasDengue Risk LogisticarbernalMxAinda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Optimization in Machine LearningDocumento26 páginasOptimization in Machine LearningrbernalMxAinda não há avaliações
- Notes On Clifford AlgebrasDocumento62 páginasNotes On Clifford AlgebrasrbernalMxAinda não há avaliações
- NN MusicDocumento34 páginasNN MusicrbernalMxAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- NN MusicDocumento34 páginasNN MusicrbernalMxAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- ZuazuaDocumento311 páginasZuazuarbernalMxAinda não há avaliações
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Normal and Anomalous Diffusion: A Tutorial: Loukas Vlahos, Heinz IslikerDocumento40 páginasNormal and Anomalous Diffusion: A Tutorial: Loukas Vlahos, Heinz IslikerrbernalMxAinda não há avaliações
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Diplom PerezDocumento63 páginasDiplom PerezrbernalMxAinda não há avaliações
- Guiding The Self-Organization of Random Boolean NetworksDocumento16 páginasGuiding The Self-Organization of Random Boolean NetworksrbernalMxAinda não há avaliações
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- ShiHai MorseControlDocumento16 páginasShiHai MorseControlrbernalMxAinda não há avaliações
- Osssc Peo & Ja Number System Practice: Class LinkDocumento21 páginasOsssc Peo & Ja Number System Practice: Class Linksunita raniAinda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
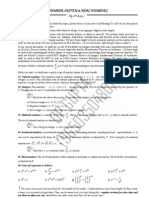
- Real Numbers & Number SystemDocumento4 páginasReal Numbers & Number SystemOP GuptaAinda não há avaliações
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Quarter 1-Module 16: MathematicsDocumento15 páginasQuarter 1-Module 16: MathematicsJaneAinda não há avaliações
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- mst210 - Unit 12 - E1i1 PDFDocumento57 páginasmst210 - Unit 12 - E1i1 PDFValdrin EjupiAinda não há avaliações
- Csir Net Functional AnalysisDocumento91 páginasCsir Net Functional Analysissourav ganguly100% (1)
- Lie Algebras ScriptDocumento274 páginasLie Algebras ScriptJustAinda não há avaliações
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Assignment Unit 6 LESSON 1 - LESSON 7 Quiz Review-1Documento7 páginasAssignment Unit 6 LESSON 1 - LESSON 7 Quiz Review-1Haley VogtAinda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Calculus BookDocumento4 páginasCalculus BookMuhammad Noman Khalid0% (1)
- The Law of Cosines: Find Each Measurement Indicated. Round Your Answers To The Nearest TenthDocumento4 páginasThe Law of Cosines: Find Each Measurement Indicated. Round Your Answers To The Nearest TenthDinesCidAinda não há avaliações
- Applying Rational Equations Learning Objective(s)Documento5 páginasApplying Rational Equations Learning Objective(s)Aisa EdzaAinda não há avaliações
- Basic Calculus ModuleDocumento2 páginasBasic Calculus ModuleIrishSarioAloAinda não há avaliações
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Exercise 1.1: CLASS - 10th Chapter - 1 (Real Numbers)Documento24 páginasExercise 1.1: CLASS - 10th Chapter - 1 (Real Numbers)Payal ShuklaAinda não há avaliações
- O Maths J 2017 2 1Documento30 páginasO Maths J 2017 2 1EvansAinda não há avaliações
- HW 1Documento3 páginasHW 1johanpenuela100% (1)
- Maths ShortcutsDocumento190 páginasMaths ShortcutsFateh Singh100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Junior Secondary Mathematics175 - 126707893120100225Documento266 páginasJunior Secondary Mathematics175 - 126707893120100225palkybdAinda não há avaliações
- Vinay Kumar - Differential Calculus For JEE Main and Advanced PDFDocumento918 páginasVinay Kumar - Differential Calculus For JEE Main and Advanced PDFRodrigo Osorio Guerra63% (8)
- Mandelbrot Julia SetsDocumento13 páginasMandelbrot Julia SetsJacobMauckAinda não há avaliações
- Algebra 2 Honors Final REVIEW June 2018Documento28 páginasAlgebra 2 Honors Final REVIEW June 2018Tanvi SinghAinda não há avaliações
- Jom Tanya Sifu :15 Days Programme Part 1Documento15 páginasJom Tanya Sifu :15 Days Programme Part 1Hayati Aini AhmadAinda não há avaliações
- Expressions Guided NotesDocumento5 páginasExpressions Guided Notesapi-554365948Ainda não há avaliações
- MAC 1105 College AlgebraDocumento4 páginasMAC 1105 College AlgebraCornerstoneFYEAinda não há avaliações
- 06 Jacobi Gauss SeidelDocumento65 páginas06 Jacobi Gauss SeidelKim Harly100% (1)
- Lecture1: Introduction To Scalar and Vector Fields, GradientDocumento10 páginasLecture1: Introduction To Scalar and Vector Fields, GradientAkanksha ThakurAinda não há avaliações
- Levenberg-Marquardt MatlabDocumento21 páginasLevenberg-Marquardt MatlabGuillermoAinda não há avaliações
- HW#1Documento2 páginasHW#1ajeet kumar yadavAinda não há avaliações
- Kvpy Set A1Documento1 páginaKvpy Set A1Himansu MookherjeeAinda não há avaliações
- Exponential Fourier Series: Scope and Background ReadingDocumento16 páginasExponential Fourier Series: Scope and Background Readingzanjabila abilAinda não há avaliações
- Alg Lesson 4-1Documento4 páginasAlg Lesson 4-1Camilo MartinezAinda não há avaliações
- Source Code: 13.write A Program To Show Addition, Subtraction and Multiplication of Two MatricesDocumento8 páginasSource Code: 13.write A Program To Show Addition, Subtraction and Multiplication of Two MatricesRAHUL DASAinda não há avaliações