Você também pode gostar
- Introduction to 6800/6802 Microprocessor Systems: Hardware, Software and ExperimentationNo EverandIntroduction to 6800/6802 Microprocessor Systems: Hardware, Software and ExperimentationAinda não há avaliações
- Interfacing and Programming 8279Documento3 páginasInterfacing and Programming 8279Seema Gaude0% (1)
- Interfacing Programs For 8085Documento37 páginasInterfacing Programs For 8085archankumarturagaAinda não há avaliações
- Classification of Embedded SystemDocumento2 páginasClassification of Embedded SystemrajeshAinda não há avaliações
- Microprocessors & Interfacing For GITAM University ECEDocumento118 páginasMicroprocessors & Interfacing For GITAM University ECEDr Sreenivasa Rao Ijjada100% (1)
- CISE414 - Unit 04 AVR Atmega PortsDocumento30 páginasCISE414 - Unit 04 AVR Atmega Portsمحمد حمدAinda não há avaliações
- Millman Halkias - Integrated ElectronicsDocumento28 páginasMillman Halkias - Integrated ElectronicsPranav SinhaAinda não há avaliações
- Microcontroller Systems (KON 309E) : Lecture Notes (WEEK 1)Documento8 páginasMicrocontroller Systems (KON 309E) : Lecture Notes (WEEK 1)Dursun DurmasınAinda não há avaliações
- 2 Complex Systems & Microprocessors Part I 2020Documento23 páginas2 Complex Systems & Microprocessors Part I 2020Rahul S.KumarAinda não há avaliações
- 14EE490 - MC Lab Manual 2019 PDFDocumento57 páginas14EE490 - MC Lab Manual 2019 PDFkavithaAinda não há avaliações
- 8086 Project TitlesDocumento15 páginas8086 Project TitlesBahiru Betela BekeleAinda não há avaliações
- Strain Guages: Bounded and Unbounded Strain GaugesDocumento5 páginasStrain Guages: Bounded and Unbounded Strain Gaugessania rahmanAinda não há avaliações
- 0 - MPMC Lab Manual A.Y. 2020-21 R-18Documento53 páginas0 - MPMC Lab Manual A.Y. 2020-21 R-18Karthik BoggarapuAinda não há avaliações
- Vlsi-Chip Input and Output CircuitsDocumento27 páginasVlsi-Chip Input and Output CircuitsSrilatha KolliAinda não há avaliações
- Experiment No 6: Implementation of Instruction Fetch Unit: Team Details: Terminal No: SL No Name Id No 1 2 3Documento6 páginasExperiment No 6: Implementation of Instruction Fetch Unit: Team Details: Terminal No: SL No Name Id No 1 2 3Shreenath VyasAinda não há avaliações
- Number Systems and Boolean LogicDocumento9 páginasNumber Systems and Boolean Logicapi-260685687Ainda não há avaliações
- DSP - Mod 6 PPT 1Documento37 páginasDSP - Mod 6 PPT 1oxygen oxygenAinda não há avaliações
- UNIT 1 - Introduction To EDA ToolsDocumento16 páginasUNIT 1 - Introduction To EDA ToolsMonali NiphadeAinda não há avaliações
- Tms 320 F 28379 DDocumento222 páginasTms 320 F 28379 DJuan Ku LosanoAinda não há avaliações
- RP Jain Adc DacDocumento27 páginasRP Jain Adc DacAnand SinghAinda não há avaliações
- Unit Iii I/O InterfacingDocumento32 páginasUnit Iii I/O InterfacingGajalakshmi AshokAinda não há avaliações
- 4X4 Keypad Based Password With ATmega32 (LCD Display)Documento6 páginas4X4 Keypad Based Password With ATmega32 (LCD Display)Emin KültürelAinda não há avaliações
- Trade-Off in Using DSP, FPGA and ASIC As Digital Hardware For SDRDocumento13 páginasTrade-Off in Using DSP, FPGA and ASIC As Digital Hardware For SDRKAMRAN12345786Ainda não há avaliações
- Microprocessor 8085 - Solution ManualDocumento35 páginasMicroprocessor 8085 - Solution Manualdutta_joyAinda não há avaliações
- EC6711 Embedded Lab Student Manual 19-20 Odd Sem PDFDocumento142 páginasEC6711 Embedded Lab Student Manual 19-20 Odd Sem PDFJayamani KrishnanAinda não há avaliações
- 8051 QuestionDocumento9 páginas8051 QuestionJai Singh MauryaAinda não há avaliações
- Implementation of Uart On An FpgaDocumento31 páginasImplementation of Uart On An FpgaNishanth KrishnappaAinda não há avaliações
- 4) PIC IO Port ProgrammingDocumento18 páginas4) PIC IO Port ProgrammingArryshah Dahmia100% (2)
- Frequency Locked Loop DC Motor Speed Control and Monitoring SystemDocumento98 páginasFrequency Locked Loop DC Motor Speed Control and Monitoring SystemCHILUKA CHANDRAKANTHAinda não há avaliações
- Lecture 4A SignalConditioning DCBRIDGE SVDocumento48 páginasLecture 4A SignalConditioning DCBRIDGE SVFazdrul AkiffAinda não há avaliações
- Lab ManualDocumento54 páginasLab ManualImmanuel VinothAinda não há avaliações
- Value Added CourseDocumento4 páginasValue Added CourseSuresh VaruvelAinda não há avaliações
- On DTHDocumento23 páginasOn DTHAkash Tyagi100% (2)
- II - Software Design For Low PowerDocumento11 páginasII - Software Design For Low Powermonishabe23Ainda não há avaliações
- GSM Based Automatic Irrigation System Using 8051 MicrocontrollerDocumento6 páginasGSM Based Automatic Irrigation System Using 8051 Microcontrolleramism24100% (1)
- Question Bank SensorsDocumento2 páginasQuestion Bank SensorsJasmine Kaur ButtarAinda não há avaliações
- DSP Lecture OneDocumento5 páginasDSP Lecture OnelyalashwanyAinda não há avaliações
- Hioki 3532 50 LCR MeterDocumento8 páginasHioki 3532 50 LCR MeterSourabh ChoudharyAinda não há avaliações
- X-Y Recorder - The Web's Where You Study In!Documento3 páginasX-Y Recorder - The Web's Where You Study In!Srihari KilaruAinda não há avaliações
- Training Report of Industrial Interaction in Cetpa Infotech PDFDocumento40 páginasTraining Report of Industrial Interaction in Cetpa Infotech PDFmjdj1230% (1)
- Chapter 12 - ADC TestingDocumento87 páginasChapter 12 - ADC TestingMonal Bhoyar100% (1)
- Ec6464-Electronics and MicroprocessorsDocumento17 páginasEc6464-Electronics and MicroprocessorsskarthikmtechAinda não há avaliações
- Ec - 501 - Microprocessor and Its ApplicationDocumento41 páginasEc - 501 - Microprocessor and Its ApplicationDr Nikita ShivhareAinda não há avaliações
- Embedded Systems Dr. Santanu Chaudhury Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 09 More On DSP ProcessorsDocumento37 páginasEmbedded Systems Dr. Santanu Chaudhury Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 09 More On DSP ProcessorsVarun BhanooAinda não há avaliações
- SMS Based Energy Meter MonitoringDocumento6 páginasSMS Based Energy Meter MonitoringNarayan Singh WaraichAinda não há avaliações
- Einfochips Interview QuestionsDocumento1 páginaEinfochips Interview Questionsshafi hasmani100% (1)
- Comparison of Pentium Processor With 80386 and 80486Documento23 páginasComparison of Pentium Processor With 80386 and 80486Tech_MX60% (5)
- Interfacing Analog To Digital Data ConvertersDocumento16 páginasInterfacing Analog To Digital Data ConvertersPrabin123Ainda não há avaliações
- 8255 Ppi ExamplesDocumento10 páginas8255 Ppi Examplesvenky258100% (1)
- Tutorial Sheet 9 DSP ArchitecturesDocumento9 páginasTutorial Sheet 9 DSP ArchitecturesDEERGH SINGH BUDHAURIA0% (1)
- Programmable Peripheral Interface Devices: Support ChipsDocumento25 páginasProgrammable Peripheral Interface Devices: Support ChipsMadhuAinda não há avaliações
- PCT 100 (Level)Documento10 páginasPCT 100 (Level)Danang Pradika PurnomoAinda não há avaliações
- Modul 4 PCT-100 Flow ControlDocumento10 páginasModul 4 PCT-100 Flow ControlBagas Ghosa HidajatAinda não há avaliações
- Lab 6 Engineering Measurement and Lab SampleDocumento11 páginasLab 6 Engineering Measurement and Lab Sampletk_atiqahAinda não há avaliações
- Bytronic SistemDocumento6 páginasBytronic SistemSedat IriçAinda não há avaliações
- Basics of MatlabDocumento69 páginasBasics of MatlabsoumenchaAinda não há avaliações
- Win8 Accessibility TutorialsDocumento55 páginasWin8 Accessibility TutorialssoumenchaAinda não há avaliações
- Matlab For Control SystemDocumento205 páginasMatlab For Control Systemsoumencha100% (1)
- Matlab Commands PDFDocumento17 páginasMatlab Commands PDFsoumenchaAinda não há avaliações
- Articles From General Knowledge Today: GK & Current Affairs: March 17, 18, 2014Documento3 páginasArticles From General Knowledge Today: GK & Current Affairs: March 17, 18, 2014soumenchaAinda não há avaliações
- Matlab Commands PDFDocumento17 páginasMatlab Commands PDFsoumenchaAinda não há avaliações
- Kav2014 enDocumento71 páginasKav2014 enАлексе СавоаяAinda não há avaliações
- Paper Presentation For MullanaDocumento6 páginasPaper Presentation For MullanasoumenchaAinda não há avaliações
- Basics of Matlab-1Documento69 páginasBasics of Matlab-1soumenchaAinda não há avaliações
- Research MethodologyDocumento27 páginasResearch Methodologysoumencha50% (2)
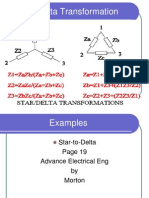
- Lect 13 Star-Delta TransformationDocumento22 páginasLect 13 Star-Delta TransformationsoumenchaAinda não há avaliações
- Lecture 8 - DC MachinesDocumento47 páginasLecture 8 - DC MachinesndmiraqAinda não há avaliações
- Electrical DC Machines DR Af-BatiDocumento102 páginasElectrical DC Machines DR Af-BatiBoneco De NeveAinda não há avaliações
- Travelling AllowanceDocumento10 páginasTravelling AllowancesoumenchaAinda não há avaliações
- UntitledDocumento3 páginasUntitledsoumenchaAinda não há avaliações
- Electrical Machine-1 Manual PDFDocumento40 páginasElectrical Machine-1 Manual PDFsoumencha80% (5)
- A NilDocumento4 páginasA NilsoumenchaAinda não há avaliações
- Equipment ListDocumento10 páginasEquipment ListsoumenchaAinda não há avaliações
- PHD Thesis of Savita KharabDocumento70 páginasPHD Thesis of Savita KharabsoumenchaAinda não há avaliações
- TPS Compiled Report: Sr. No Particulars Ground Floor 1st Floor 2nd Floor 3rd Floor Principal RoomDocumento4 páginasTPS Compiled Report: Sr. No Particulars Ground Floor 1st Floor 2nd Floor 3rd Floor Principal RoomsoumenchaAinda não há avaliações
- Kayaba B0240-18027 - 2Documento4 páginasKayaba B0240-18027 - 2TSPSRL Import ExportAinda não há avaliações
- Abutment (7m Hight)Documento8 páginasAbutment (7m Hight)Kamran AhmedAinda não há avaliações
- QP-72-01 Maintenance Policy & StrategiesDocumento12 páginasQP-72-01 Maintenance Policy & StrategiesSamsudin Ahmad100% (2)
- Experiment NoDocumento4 páginasExperiment Nodhanesh tandanAinda não há avaliações
- Design and Implementation of An Automatic Sorting MachineDocumento104 páginasDesign and Implementation of An Automatic Sorting Machineahmad100% (1)
- Forces Otion: Forces and Motion at An Amusement ParkDocumento30 páginasForces Otion: Forces and Motion at An Amusement ParkDave Khyl Josol BosqueAinda não há avaliações
- Surge Analysis and The Wave Plan MethodDocumento126 páginasSurge Analysis and The Wave Plan Methodmailmaverick8167Ainda não há avaliações
- 10 MM Manifold Mount Solenoid Valve: Product SpecificationsDocumento6 páginas10 MM Manifold Mount Solenoid Valve: Product Specificationshüseyin vururAinda não há avaliações
- Lecture 3 Kinematics and DynamicsDocumento53 páginasLecture 3 Kinematics and Dynamicsyurong FengAinda não há avaliações
- CAT Engine Specifications 2.0% O Rating: G3304 Gas Petroleum EngineDocumento4 páginasCAT Engine Specifications 2.0% O Rating: G3304 Gas Petroleum EngineDiogo Purizaca PeñaAinda não há avaliações
- AQA AS Physics A Chapter 11 Textbook AnswersDocumento3 páginasAQA AS Physics A Chapter 11 Textbook AnswerscathylisterAinda não há avaliações
- HJHDDocumento21 páginasHJHDpavlosmakridakis2525Ainda não há avaliações
- Helix Angle OptimizationDocumento10 páginasHelix Angle OptimizationkumarAinda não há avaliações
- DL 2291Documento2 páginasDL 2291Chetan MruthyunjayaAinda não há avaliações
- With Aerzen Turbos, Blowers and Compressors: Heat RecoveryDocumento8 páginasWith Aerzen Turbos, Blowers and Compressors: Heat RecoveryBülent BulutAinda não há avaliações
- Plate GirdersDocumento22 páginasPlate GirdersM Kishore KumarAinda não há avaliações
- Electrical Piping SystemDocumento16 páginasElectrical Piping SystembaharmarineAinda não há avaliações
- Parkercatalog MotorsMasterDocumento39 páginasParkercatalog MotorsMasterAgus YulfizarAinda não há avaliações
- Wheel Loaders VocabularyDocumento10 páginasWheel Loaders VocabularyLyanHyangAinda não há avaliações
- Presentation On Motors & VFD: Submitted To:-Submitted ByDocumento32 páginasPresentation On Motors & VFD: Submitted To:-Submitted Byparth dosiAinda não há avaliações
- Boiler Reference Manual: Section 2 Feedwater TreatmentDocumento53 páginasBoiler Reference Manual: Section 2 Feedwater TreatmentSaad Javed100% (2)
- Truss and Gridder RoofDocumento37 páginasTruss and Gridder RoofYashi GuptaAinda não há avaliações
- Mobil Rust PRV BulletinDocumento4 páginasMobil Rust PRV BulletinumbertiAinda não há avaliações
- Electric Actuated Butterfly Valves: FeaturesDocumento7 páginasElectric Actuated Butterfly Valves: FeaturesRicardo NapitupuluAinda não há avaliações
- White Outdoor Parts Manual 13CO616G190 LT 1650 Year 2002Documento17 páginasWhite Outdoor Parts Manual 13CO616G190 LT 1650 Year 2002Anonymous cPSmlINA30% (1)
- CHANGES in AISC's SEISMIC PROVISIONS: AISC 341-05 To AISC 341-10Documento68 páginasCHANGES in AISC's SEISMIC PROVISIONS: AISC 341-05 To AISC 341-10Anonymous 7MdZQn167% (3)
- Kobelco Crawler Crane Ck850 2f Operator Maintenance Manual S2gg24001ze09Documento20 páginasKobelco Crawler Crane Ck850 2f Operator Maintenance Manual S2gg24001ze09hazel100% (44)
- Connecting Rod Force Analysis and Weight OptimizationDocumento18 páginasConnecting Rod Force Analysis and Weight OptimizationSukhamMichaelAinda não há avaliações
- Pages From Asme Sec Ix 2017-3Documento1 páginaPages From Asme Sec Ix 2017-3Akhtar AnsariAinda não há avaliações
- MF5400 Workshop Manual 03-EngineDocumento42 páginasMF5400 Workshop Manual 03-EngineFerran Alfonso100% (3)