Você também pode gostar
- Thomson Electrac HD Linear Actuator Motion Control per CAN BusNo EverandThomson Electrac HD Linear Actuator Motion Control per CAN BusAinda não há avaliações
- General Introduction Manual: ©jephis Technology LTDDocumento5 páginasGeneral Introduction Manual: ©jephis Technology LTDaudioimagen100% (1)
- Car Memory Options: Anti Theft System (DWA) (Available Only On Vehicles With DWA Alarm System)Documento6 páginasCar Memory Options: Anti Theft System (DWA) (Available Only On Vehicles With DWA Alarm System)cphearnAinda não há avaliações
- BMW ABS DSC Pump Problems Troubleshooting YOUCANICDocumento22 páginasBMW ABS DSC Pump Problems Troubleshooting YOUCANICBriliana MalaikaAinda não há avaliações
- DPF BMW InfoDocumento3 páginasDPF BMW Infor0my81Ainda não há avaliações
- BMW ICOM diagnostic tool comparisonDocumento2 páginasBMW ICOM diagnostic tool comparisonThiagoAinda não há avaliações
- CARPROG BMW Key Programmer Manual PDFDocumento10 páginasCARPROG BMW Key Programmer Manual PDFTiberiu Si Alina Timoc100% (1)
- CARPROG BMW Key Programmer ManualDocumento10 páginasCARPROG BMW Key Programmer ManualFlorian LeordeanuAinda não há avaliações
- Honda Immobilizer Emulator Installation Instructions: Red KeyDocumento4 páginasHonda Immobilizer Emulator Installation Instructions: Red KeySergio Alexander Pérez ChotoAinda não há avaliações
- Diagnostic Scan Tool Can ObdiiDocumento48 páginasDiagnostic Scan Tool Can ObdiiJhony BhatAinda não há avaliações
- GM SeedkeyDocumento9 páginasGM Seedkeykamaleon doradoAinda não há avaliações
- ST810 - Advanced Diesel Technology Workbook PDFDocumento119 páginasST810 - Advanced Diesel Technology Workbook PDFVASEKAinda não há avaliações
- E38 Replacing The HeadlinerDocumento41 páginasE38 Replacing The Headlinerbelewjo100% (1)
- FMP User GuideDocumento24 páginasFMP User Guidekamaleon doradoAinda não há avaliações
- CARPROG GM Airbag Reset ManualDocumento8 páginasCARPROG GM Airbag Reset ManualkojcanAinda não há avaliações
- E60 BmcodesDocumento2 páginasE60 BmcodesShawqi SaeedAinda não há avaliações
- BMW Lifetime Maintenance Schedule v03.13Documento46 páginasBMW Lifetime Maintenance Schedule v03.13Dude McgraffAinda não há avaliações
- E90 Entertainment and CommunicationDocumento41 páginasE90 Entertainment and CommunicationStevan AritonovicAinda não há avaliações
- BMW Nav and TV Owners Manual - 1999Documento92 páginasBMW Nav and TV Owners Manual - 1999David ALVESAinda não há avaliações
- Install eCOM Part P Interface for DTS V8Documento5 páginasInstall eCOM Part P Interface for DTS V8Dylan DYAinda não há avaliações
- Maintenance Booklet SLK 55 AMG 2006Documento71 páginasMaintenance Booklet SLK 55 AMG 2006Stefano Tenzi100% (1)
- X431 PAD III Mercedes BMW TrainingDocumento82 páginasX431 PAD III Mercedes BMW Trainingtong Saetung100% (1)
- Tips and Tricks On BMW 330dDocumento4 páginasTips and Tricks On BMW 330dacezafirovAinda não há avaliações
- GM Sps ManualDocumento40 páginasGM Sps ManualABAinda não há avaliações
- 02b - E70 Gasoline EnginesDocumento27 páginas02b - E70 Gasoline EnginesLeonard 'Leo' NgAinda não há avaliações
- CANBUS InfoDocumento19 páginasCANBUS InfoBenito Camela100% (1)
- SI Failure of Bremi Ignition Coils E36 - 7, E39, E46, E53Documento2 páginasSI Failure of Bremi Ignition Coils E36 - 7, E39, E46, E53strexxAinda não há avaliações
- BMW: Bayerische Motoren Werke AGDocumento19 páginasBMW: Bayerische Motoren Werke AGAchal Srivastav100% (1)
- SBT Electrical Distribution Centre - E87, E90, E91, E92Documento2 páginasSBT Electrical Distribution Centre - E87, E90, E91, E92Engsolution LdaAinda não há avaliações
- OSS Install Guide 3 3Documento30 páginasOSS Install Guide 3 31piotr1Ainda não há avaliações
- BMW Multi Tool User Manual PDFDocumento29 páginasBMW Multi Tool User Manual PDFAnonymous DTd7Z2n100% (1)
- Adap e Fo Vehicle On Boa D Diagno Ic: Engine Control UnitDocumento5 páginasAdap e Fo Vehicle On Boa D Diagno Ic: Engine Control UnitVineeth Vinu100% (1)
- WDS Wiring Diagram SystemDocumento1 páginaWDS Wiring Diagram SystemAlexei BetosAinda não há avaliações
- Fvdi BMW Intro: Functions Included in The Base Package (FVDI Interface)Documento9 páginasFvdi BMW Intro: Functions Included in The Base Package (FVDI Interface)Juan BucaroAinda não há avaliações
- BMW Inpa Interpreter For Test ProceduresDocumento74 páginasBMW Inpa Interpreter For Test Procedurescorelem100% (1)
- Vehicle Coding Guide: Learn ZCS Structure, Storage & Module CodingDocumento14 páginasVehicle Coding Guide: Learn ZCS Structure, Storage & Module CodingJim SmithAinda não há avaliações
- E90 Install Guide1.0Documento39 páginasE90 Install Guide1.0Stratone MariusAinda não há avaliações
- Mercedes FunctionsDocumento9 páginasMercedes Functionsabo maremAinda não há avaliações
- Product Information.: Technical Training. F01/F02 LCI InfotainmentDocumento30 páginasProduct Information.: Technical Training. F01/F02 LCI InfotainmentmunkarobertAinda não há avaliações
- F01 Car Access System 4Documento34 páginasF01 Car Access System 4Phan VănAinda não há avaliações
- BMW MSD80 DiagnosticsDocumento26 páginasBMW MSD80 DiagnosticshoffspringAinda não há avaliações
- Mercedes-Benz Vehicle Communication Software Manual: August 2013Documento114 páginasMercedes-Benz Vehicle Communication Software Manual: August 2013Tonya GoresAinda não há avaliações
- Installation Instructions.: Parts and AccessoriesDocumento15 páginasInstallation Instructions.: Parts and AccessoriesDag EspedalenAinda não há avaliações
- US Domestic Vehicle Communication Software ManualDocumento814 páginasUS Domestic Vehicle Communication Software ManualScott Bobarino100% (1)
- Connector Usage & Canbus Guide: X-431 Scanner, Infinite and Cube Call 877-Launch9Documento12 páginasConnector Usage & Canbus Guide: X-431 Scanner, Infinite and Cube Call 877-Launch9Sandro CozaciucAinda não há avaliações
- Hidden MenuDocumento2 páginasHidden MenuSaputro SaputroAinda não há avaliações
- Accessport: User Guide Subaru Turbo ModelsDocumento29 páginasAccessport: User Guide Subaru Turbo ModelsbravadosAinda não há avaliações
- Automatic Transmission BMWDocumento15 páginasAutomatic Transmission BMWYokie Ariana Setiawan0% (1)
- 04 - BMW TPMS Wheels and TiresDocumento64 páginas04 - BMW TPMS Wheels and TiresabulAinda não há avaliações
- BMW Coding and Programming Technical ManualDocumento185 páginasBMW Coding and Programming Technical ManualLeon MemonAinda não há avaliações
- BMW Navigation and OBC ManualDocumento99 páginasBMW Navigation and OBC ManualStana SorinAinda não há avaliações
- Abrites Diagnostics For JLR User ManualDocumento19 páginasAbrites Diagnostics For JLR User ManualmisternikiAinda não há avaliações
- x431 Connector Usage and Canbus GuideDocumento15 páginasx431 Connector Usage and Canbus GuideEric SimardAinda não há avaliações
- Audi A4 Quattro 3.0 Liter 6-Cyl. 5V Fuel Injection & IgnitionDocumento259 páginasAudi A4 Quattro 3.0 Liter 6-Cyl. 5V Fuel Injection & IgnitionNPAinda não há avaliações
- Inpa Ediabas UserDocumento59 páginasInpa Ediabas UsergoogleheadAinda não há avaliações
- E65/66 Air Suspension System Components and Operation GuideDocumento17 páginasE65/66 Air Suspension System Components and Operation GuideSalisburAinda não há avaliações
- Fully Autonomous Vehicles: Visions of the future or still reality?No EverandFully Autonomous Vehicles: Visions of the future or still reality?Ainda não há avaliações
- Check Engine Light Evolution: How to Elegantly Hack Your Automotive Sales and Service ExperienceNo EverandCheck Engine Light Evolution: How to Elegantly Hack Your Automotive Sales and Service ExperienceAinda não há avaliações
- Hardware Hacker - IV PDFDocumento168 páginasHardware Hacker - IV PDFkalico67Ainda não há avaliações
- Tools of The Hardware Hacking TradeDocumento38 páginasTools of The Hardware Hacking TradeWane Stayblur100% (2)
- Hardware Hacker - I PDFDocumento124 páginasHardware Hacker - I PDFkalico67Ainda não há avaliações
- Hardware Hacker 2Documento157 páginasHardware Hacker 2mictester100% (1)
- Hackar1 PDFDocumento124 páginasHackar1 PDFkalico67Ainda não há avaliações
- Hardwarehacking SlidesDocumento65 páginasHardwarehacking Slideskalico67Ainda não há avaliações
- BlackHat DC 2011 Grand-WorkshopDocumento93 páginasBlackHat DC 2011 Grand-WorkshopcyberavAinda não há avaliações
- 101 Ways To Brick Your Hardware - SlidesDocumento45 páginas101 Ways To Brick Your Hardware - Slideskalico67Ainda não há avaliações
- Hackar1 PDFDocumento124 páginasHackar1 PDFkalico67Ainda não há avaliações
- Elect AutomobileDocumento222 páginasElect Automobilekalico67100% (1)
- Hacking The Xbox FreeDocumento291 páginasHacking The Xbox FreefibratoAinda não há avaliações
- Testing Electronic Components - Colin Mitchell PDFDocumento81 páginasTesting Electronic Components - Colin Mitchell PDFstallone2133% (3)
- Tutorial Book 0.4Documento154 páginasTutorial Book 0.4came_ln10Ainda não há avaliações
- CAN Communication For Vehicle Emission Control Systems - ArticleDocumento7 páginasCAN Communication For Vehicle Emission Control Systems - Articlekalico67Ainda não há avaliações
- The Mercedes 722.6 Not Just Another 5-SpeedDocumento10 páginasThe Mercedes 722.6 Not Just Another 5-Speedkalico67100% (1)
- v32 81Documento7 páginasv32 81kalico67Ainda não há avaliações
- Ferrites For Inductors and TransformersDocumento185 páginasFerrites For Inductors and Transformerskalico67Ainda não há avaliações
- 18 037 05Documento25 páginas18 037 05kalico67Ainda não há avaliações
- Nag 1Documento199 páginasNag 1Gigi Honda100% (2)
- Engineering Fundamentals of The Internal Combustion Engine - Willard W. PulkrabekDocumento425 páginasEngineering Fundamentals of The Internal Combustion Engine - Willard W. Pulkrabekmi2jaca100% (2)
- DOE Fundamentals Handbook, Mechanical Science, Volume 1 of 2Documento122 páginasDOE Fundamentals Handbook, Mechanical Science, Volume 1 of 2Bob VinesAinda não há avaliações
- Spring Design & CalculationDocumento40 páginasSpring Design & Calculationkalico67100% (9)
- Teacher's Handbook of Manual Training - Metal WorkDocumento154 páginasTeacher's Handbook of Manual Training - Metal Workkalico67100% (1)
- MCQ Lean AnswersDocumento16 páginasMCQ Lean Answersالمعتزبالله جاب الله0% (1)
- NC 601 User ManualDocumento64 páginasNC 601 User ManualgudmragAinda não há avaliações
- Assignment - JP Morgan Chase & Co.Documento32 páginasAssignment - JP Morgan Chase & Co.ShivamAinda não há avaliações
- Rr310803 Heat TransferDocumento8 páginasRr310803 Heat TransferSrinivasa Rao GAinda não há avaliações
- vb8 Portable Data Collector, Analyzer and Balancer Datasheet - 116M5343Documento9 páginasvb8 Portable Data Collector, Analyzer and Balancer Datasheet - 116M5343Camilo GutierrezAinda não há avaliações
- Carbide Burrs: High Performance Cutting ToolsDocumento30 páginasCarbide Burrs: High Performance Cutting ToolsVigneswaranAinda não há avaliações
- Carto 3 System OverviewDocumento8 páginasCarto 3 System Overviewdanang setiawanAinda não há avaliações
- The Kurt Rosenwinkel Forum (Chords)Documento7 páginasThe Kurt Rosenwinkel Forum (Chords)thrashtilldeath100% (1)
- Application of Electro PneumaticsDocumento2 páginasApplication of Electro PneumaticsMaribel C. MagbanuaAinda não há avaliações
- Audio Lingual MethodDocumento12 páginasAudio Lingual MethodKeviin Mariño VivasAinda não há avaliações
- Passengers' Perspective of Philippine Airlines Within Nueva EcijaDocumento15 páginasPassengers' Perspective of Philippine Airlines Within Nueva EcijaPoonam KilaniyaAinda não há avaliações
- Government Procurement Reform Act under RA 9184Documento50 páginasGovernment Procurement Reform Act under RA 9184Maricel Anober100% (1)
- Tiktok QuestionnaireDocumento4 páginasTiktok QuestionnaireRahman OluwaseyiAinda não há avaliações
- DplynetDocumento312 páginasDplynetPhạm TuânAinda não há avaliações
- UTI Asset Management Company LTD - Summer Internship Report On Mutual Fund Is The Better Investment PlanDocumento110 páginasUTI Asset Management Company LTD - Summer Internship Report On Mutual Fund Is The Better Investment PlanKrishna YadavAinda não há avaliações
- ABS Rule EarthingDocumento1 páginaABS Rule Earthing우승환Woo seung hwanAinda não há avaliações
- INTEGMED1Documento17 páginasINTEGMED1Nica RTAinda não há avaliações
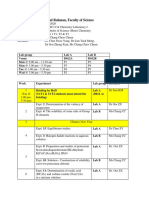
- UTAR Faculty of Science Chemistry Lab SessionsDocumento3 páginasUTAR Faculty of Science Chemistry Lab SessionsYong LiAinda não há avaliações
- Mufon Ufo Journal - May 1985Documento20 páginasMufon Ufo Journal - May 1985Carlos RodriguezAinda não há avaliações
- Arch DamsDocumento24 páginasArch DamsChalang AkramAinda não há avaliações
- ABC - The Good Doctor 1x01 (Pilot)Documento62 páginasABC - The Good Doctor 1x01 (Pilot)Vishnu SinhaAinda não há avaliações
- Documentation Tree PlantingDocumento12 páginasDocumentation Tree PlantingLloydDagsilAinda não há avaliações
- Models HL300 & HL400 ML-134351 ML-134348: 701 S. RIDGE AVENUE TROY, OHIO 45374-0001Documento24 páginasModels HL300 & HL400 ML-134351 ML-134348: 701 S. RIDGE AVENUE TROY, OHIO 45374-0001ZackyExlipzAinda não há avaliações
- Gri Standards Consolidated 2020 PDFDocumento575 páginasGri Standards Consolidated 2020 PDFFarwa KhalidAinda não há avaliações
- ARBITRATION Project File LLB-4th Sem PDFDocumento3 páginasARBITRATION Project File LLB-4th Sem PDFmeenakshi kaur0% (9)
- ProPath Selected As Medical Director For Baylor Scott & White Medical Center - SunnyvaleDocumento3 páginasProPath Selected As Medical Director For Baylor Scott & White Medical Center - SunnyvalePR.comAinda não há avaliações
- Introducere 1Documento11 páginasIntroducere 1Victor EnachiAinda não há avaliações
- Startup Due Diligence ChecklistDocumento2 páginasStartup Due Diligence ChecklistSarim Saleheen LariAinda não há avaliações
- Gmp-Man-5 0 2 PDFDocumento145 páginasGmp-Man-5 0 2 PDFMefnd MhmdAinda não há avaliações
- Williams-Sonoma (West Elm) v. Wayfair - ComplaintDocumento99 páginasWilliams-Sonoma (West Elm) v. Wayfair - ComplaintSarah BursteinAinda não há avaliações