Você também pode gostar
- WEG HGF Low and High Voltage High Performance Electric Motor Range Broa017 Brochure EnglishDocumento40 páginasWEG HGF Low and High Voltage High Performance Electric Motor Range Broa017 Brochure EnglishHatem AbdelrahmanAinda não há avaliações
- Understandingamp - Phaseinrotatingmachineryvibinst 07 20pgsDocumento20 páginasUnderstandingamp - Phaseinrotatingmachineryvibinst 07 20pgsHatem Abdelrahman100% (1)
- Dynamic Stresses Hydro Power Plant RKAggarwalDocumento22 páginasDynamic Stresses Hydro Power Plant RKAggarwalDheeraj DhimanAinda não há avaliações
- Practical Solutions To Machinery and Maintenance Vibration Problems Chapter 7, Misalignment Section 4, Machinery Soft FeetDocumento2 páginasPractical Solutions To Machinery and Maintenance Vibration Problems Chapter 7, Misalignment Section 4, Machinery Soft FeetHatem AbdelrahmanAinda não há avaliações
- The Magnetic Center Finding Using Vibrating Wire TechniqueDocumento6 páginasThe Magnetic Center Finding Using Vibrating Wire TechniqueHatem AbdelrahmanAinda não há avaliações
- Field Balancing Large Rotating MachineryDocumento26 páginasField Balancing Large Rotating MachineryShantanu SamajdarAinda não há avaliações
- EM10 - Electric Motor Vibrations - Eshleman - 06051 (2) TRYTRYDocumento46 páginasEM10 - Electric Motor Vibrations - Eshleman - 06051 (2) TRYTRYHatem Abdelrahman100% (2)
- Gei 100351Documento32 páginasGei 100351Hatem Abdelrahman100% (1)
- 19 KKKKKKKKKKKKKKKKKKDocumento4 páginas19 KKKKKKKKKKKKKKKKKKHatem Abdelrahman100% (1)
- Prec Maint March 2007Documento9 páginasPrec Maint March 2007Hatem AbdelrahmanAinda não há avaliações
- Fault Zone - : Air GapDocumento0 páginaFault Zone - : Air GapHatem AbdelrahmanAinda não há avaliações
- IBERDROLA's Center For Monitoring, Diagnostic and Simulation (CMDS) of Combined-Cycle Power PlantsDocumento4 páginasIBERDROLA's Center For Monitoring, Diagnostic and Simulation (CMDS) of Combined-Cycle Power PlantsHatem AbdelrahmanAinda não há avaliações
- Huang Xianghui 20050fdggggggggggggggggggggggggggggggggggggggggggggggg5 PHDDocumento130 páginasHuang Xianghui 20050fdggggggggggggggggggggggggggggggggggggggggggggggg5 PHDHatem AbdelrahmanAinda não há avaliações
- Icmtech435435 345435 43543Documento63 páginasIcmtech435435 345435 43543Hatem Abdelrahman100% (1)
- Kingsbury Leg ComponentsDocumento3 páginasKingsbury Leg ComponentsHatem Abdelrahman100% (1)
- Article 6hy JytjuytDocumento7 páginasArticle 6hy JytjuytHatem AbdelrahmanAinda não há avaliações
- V106 Relative Motion Record FormDocumento0 páginaV106 Relative Motion Record FormHatem Abdelrahman100% (1)
- Customer Application Centers: Global Accessibility To Our TechnologyDocumento1 páginaCustomer Application Centers: Global Accessibility To Our TechnologyHatem AbdelrahmanAinda não há avaliações
- EM10 - Electric Motor Vibrations - Eshleman - 06051 (2) TRYTRYDocumento46 páginasEM10 - Electric Motor Vibrations - Eshleman - 06051 (2) TRYTRYHatem Abdelrahman100% (2)
- Vibrations NotesDocumento43 páginasVibrations NotesNicolas LuchmunAinda não há avaliações
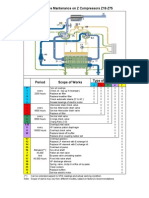
- Preventive Mantenance On Z Compressors Z18-Z75: Take All ReadingsDocumento1 páginaPreventive Mantenance On Z Compressors Z18-Z75: Take All ReadingsHatem AbdelrahmanAinda não há avaliações
- Best Practices: Asset Condition ManagementDocumento2 páginasBest Practices: Asset Condition ManagementHatem AbdelrahmanAinda não há avaliações
- 1q07 Beat Freq Back To BasicsDocumento3 páginas1q07 Beat Freq Back To BasicsHatem AbdelrahmanAinda não há avaliações
- Don't Get Soft: Cover Series: Installation Best PracticesDocumento6 páginasDon't Get Soft: Cover Series: Installation Best PracticesHatem Abdelrahman100% (1)
- Why Upgrades Are Important - : Some Lessons Learned With Older Monitoring SystemsDocumento2 páginasWhy Upgrades Are Important - : Some Lessons Learned With Older Monitoring SystemsHatem AbdelrahmanAinda não há avaliações
- 1q03 3500 22mDocumento4 páginas1q03 3500 22mscribdkhatnAinda não há avaliações
- Ontario Power Generation's Nanticoke Power PlantDocumento3 páginasOntario Power Generation's Nanticoke Power PlantHatem AbdelrahmanAinda não há avaliações
- 2 Q 01 HanifanDocumento2 páginas2 Q 01 HanifanHatem AbdelrahmanAinda não há avaliações
- Helping You ... : Fourth Quarter 1999 Vol. 20 No. 4Documento1 páginaHelping You ... : Fourth Quarter 1999 Vol. 20 No. 4Hatem AbdelrahmanAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (120)
- Sample Physics Lab ReportDocumento4 páginasSample Physics Lab ReportTaehyun ChangAinda não há avaliações
- Rhumb Line Calculations, BennetDocumento8 páginasRhumb Line Calculations, Bennetandresmejia68Ainda não há avaliações
- Ellipse orDocumento23 páginasEllipse orTEJA SINGHAinda não há avaliações
- Final Exam - Basic MathDocumento1 páginaFinal Exam - Basic MathSheila Marie AmigoAinda não há avaliações
- Exercio 3.9 SakuraiDocumento7 páginasExercio 3.9 SakuraiManoel Junior Junior JapaAinda não há avaliações
- Intro MUSSVDocumento4 páginasIntro MUSSVMohammad Naser HashemniaAinda não há avaliações
- 96-0237 Chinese Mill OperatorDocumento198 páginas96-0237 Chinese Mill Operatorapi-3775717100% (1)
- 32 2H Nov 2021 QPDocumento28 páginas32 2H Nov 2021 QPXoticMemes okAinda não há avaliações
- Eng SP CognatesDocumento29 páginasEng SP Cognatescuba_viajesAinda não há avaliações
- Polarization WavesDocumento37 páginasPolarization WavesNil TaiiayAinda não há avaliações
- MATH 352 Sample Project 1Documento10 páginasMATH 352 Sample Project 1Withoon ChinchalongpornAinda não há avaliações
- Week4 Day2 Chomsky HierarchyDocumento10 páginasWeek4 Day2 Chomsky HierarchysandyrachaAinda não há avaliações
- Polygon ClippingDocumento25 páginasPolygon ClippingSahil Gupta50% (2)
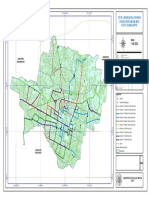
- Peta Jaringan Layanan Angkutan UmumDocumento1 páginaPeta Jaringan Layanan Angkutan UmumARFICOAinda não há avaliações
- CIVN3001-FINAL REPORT ... MDocumento20 páginasCIVN3001-FINAL REPORT ... MThabiso MotalingoaneAinda não há avaliações
- Torreti - Bachelard e FenomenotecnicaDocumento19 páginasTorreti - Bachelard e FenomenotecnicaGabriel Kafure da RochaAinda não há avaliações
- CTSH - Technical Bulletin 97-1Documento4 páginasCTSH - Technical Bulletin 97-1hesigu14Ainda não há avaliações
- Math Models of Physics ProblemsDocumento29 páginasMath Models of Physics ProblemsSsj KakarottAinda não há avaliações
- Python Programming Lab Manual: 1. Write A Program To Demonstrate Different Number Datatypes in PythonDocumento22 páginasPython Programming Lab Manual: 1. Write A Program To Demonstrate Different Number Datatypes in PythonNaresh Babu100% (1)
- CSEC MayJune2013 01234020.SPEC PDFDocumento36 páginasCSEC MayJune2013 01234020.SPEC PDFCarl Agape Davis0% (1)
- Engineering Drawing Form 4 - Figure of Equal AreaDocumento13 páginasEngineering Drawing Form 4 - Figure of Equal AreaDo The CuongAinda não há avaliações
- Tybsc - Physics Applied Component Computer Science 1Documento12 páginasTybsc - Physics Applied Component Computer Science 1shivAinda não há avaliações
- Answer:: Activity in StatisticsDocumento3 páginasAnswer:: Activity in StatisticsRovz GC BinAinda não há avaliações
- Quiz02: Top of FormDocumento4 páginasQuiz02: Top of FormJay WongAinda não há avaliações
- Simple Solutions TopicsDocumento3 páginasSimple Solutions Topicsapi-344050382Ainda não há avaliações
- NotesDocumento193 páginasNotesLemi TuroAinda não há avaliações
- المعاصر - ماث - 3 ع - ترم 2 - ذاكرولي PDFDocumento798 páginasالمعاصر - ماث - 3 ع - ترم 2 - ذاكرولي PDFTarekAinda não há avaliações
- Math Mid Sem 1 Kiit PaperDocumento1 páginaMath Mid Sem 1 Kiit PapersellyAinda não há avaliações
- Finding The Raw ScoreDocumento33 páginasFinding The Raw ScoreRaven Jade MasapaAinda não há avaliações
- 10 - 1 Simplifying Rational Expressions Trout 09Documento14 páginas10 - 1 Simplifying Rational Expressions Trout 09Vehid KurtićAinda não há avaliações