Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Javelin DatasheetDocumento4 páginasJavelin DatasheetnekkammAinda não há avaliações
- Coax Connectors - RF TypesDocumento6 páginasCoax Connectors - RF TypesMicah WilsonAinda não há avaliações
- Ic 8855Documento36 páginasIc 8855Nick CarterAinda não há avaliações
- FM Principles: Modulation Index and Bandwidth RequirementsDocumento11 páginasFM Principles: Modulation Index and Bandwidth RequirementsMike FinezaAinda não há avaliações
- JCVHHTT-65B-R6: Electrical SpecificationsDocumento4 páginasJCVHHTT-65B-R6: Electrical SpecificationsNiko ZabalaAinda não há avaliações
- NDB Manuals (06 NDB) PDFDocumento121 páginasNDB Manuals (06 NDB) PDFLe HienAinda não há avaliações
- Modulation and What Is Amplitude Key ShiftDocumento2 páginasModulation and What Is Amplitude Key ShiftFaiqAinda não há avaliações
- 150Mbps Range 3km Outdoor Signal King SK 999WN USB Wireless Adaptor Antenna - EbayDocumento5 páginas150Mbps Range 3km Outdoor Signal King SK 999WN USB Wireless Adaptor Antenna - EbayDadang Ibnu SetyawanAinda não há avaliações
- TEMS Drive Test Investigation Using 16.1Documento30 páginasTEMS Drive Test Investigation Using 16.1Khusni Eka WardanaAinda não há avaliações
- IEEE 802.11bd NGV Ranging Types SummaryDocumento17 páginasIEEE 802.11bd NGV Ranging Types SummaryPriyanshuAinda não há avaliações
- BroadradioDocumento2 páginasBroadradioAli MohadesAinda não há avaliações
- Radar Applications: William L. Melvin, PH.D., and James A. Scheer, Georgia Institute of Technology, Atlanta, GADocumento16 páginasRadar Applications: William L. Melvin, PH.D., and James A. Scheer, Georgia Institute of Technology, Atlanta, GAAtilio NgigwaAinda não há avaliações
- LTE Timing Advance (Huawei)Documento6 páginasLTE Timing Advance (Huawei)Edwin IromaAinda não há avaliações
- Mobile Network Evolution To 5gDocumento57 páginasMobile Network Evolution To 5gAqib EhsanAinda não há avaliações
- LMS7002M DataSheet 2 2r0 PDFDocumento25 páginasLMS7002M DataSheet 2 2r0 PDFthagha mohamedAinda não há avaliações
- Wireless Power Transmission Using Magnetic Induction Effect: Guided By: Proposed byDocumento22 páginasWireless Power Transmission Using Magnetic Induction Effect: Guided By: Proposed byMelkey AnandAinda não há avaliações
- GSM Call Drop Problem Analysis - BenDocumento80 páginasGSM Call Drop Problem Analysis - BenbeniAinda não há avaliações
- RVV-33B-R3: General SpecificationsDocumento4 páginasRVV-33B-R3: General SpecificationsJulian Andres VictoriaAinda não há avaliações
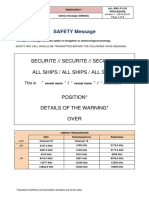
- All - Emy.p.2.03 Safety Message (GMDSS)Documento2 páginasAll - Emy.p.2.03 Safety Message (GMDSS)Robin TetreAinda não há avaliações
- LoraDocumento8 páginasLoraKike VillasurAinda não há avaliações
- Dual Staircase Shaped MSADocumento5 páginasDual Staircase Shaped MSAKumar SreeAinda não há avaliações
- IEEE A 2.4 GHZ Radio SolutionDocumento11 páginasIEEE A 2.4 GHZ Radio SolutionBerliantoAinda não há avaliações
- TV Program - DW Arabia - Radio Program: Nilesat 201Documento1 páginaTV Program - DW Arabia - Radio Program: Nilesat 201عمرو دراغمةAinda não há avaliações
- A Survey On Beyond 5G Network With The Advent of 6G Architecture and Emerging TechnologiesDocumento36 páginasA Survey On Beyond 5G Network With The Advent of 6G Architecture and Emerging TechnologiesEarthNandanAinda não há avaliações
- Mobility ManagementDocumento30 páginasMobility ManagementKushAinda não há avaliações
- The GSM Module (Recovered)Documento13 páginasThe GSM Module (Recovered)MJ MagalonaAinda não há avaliações
- Reliance JIO Case PresentationDocumento6 páginasReliance JIO Case PresentationKaushik ThackerAinda não há avaliações
- DO7-Radar Navigation - Operational Level Flashcards - Cram - Com2Documento22 páginasDO7-Radar Navigation - Operational Level Flashcards - Cram - Com2Petrache Bogdan50% (2)
- Risat 1Documento12 páginasRisat 1ramulu_492Ainda não há avaliações
- ZXRAN A9611 S35 Product DescriptionDocumento22 páginasZXRAN A9611 S35 Product DescriptionHimanshu GondAinda não há avaliações