Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1091)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Several Terms Redirect Here. For Other Uses, See,, and - This Article Is About Jinn in Islam. For Other Uses, See andDocumento2 páginasSeveral Terms Redirect Here. For Other Uses, See,, and - This Article Is About Jinn in Islam. For Other Uses, See andEduard Loberez ReyesAinda não há avaliações
- Peter Vas - Sensor Less Vector and Direct Torque ControlDocumento376 páginasPeter Vas - Sensor Less Vector and Direct Torque Controlveranvv83% (6)
- Is 456 - 2016 4th Amendment Plain and Reinforced Concrete - Code of Practice - Civil4MDocumento3 páginasIs 456 - 2016 4th Amendment Plain and Reinforced Concrete - Code of Practice - Civil4Mvasudeo_ee0% (1)
- Periods of Nursing HistoryDocumento38 páginasPeriods of Nursing HistoryJeny Pearl Hijosa0% (1)
- Ayurveda Secrets of Healing Maya Tiwari.07172 2seasonal CleansingDocumento5 páginasAyurveda Secrets of Healing Maya Tiwari.07172 2seasonal CleansingkidiyoorAinda não há avaliações
- Low Voltage Ride ThroughDocumento6 páginasLow Voltage Ride ThroughMona ValikhaniAinda não há avaliações
- The Research On Intelligent Management System of Li-Ion Power Battery String of Electric VehicleDocumento3 páginasThe Research On Intelligent Management System of Li-Ion Power Battery String of Electric VehicleMona ValikhaniAinda não há avaliações
- Automotive Battery Management SystemsDocumento6 páginasAutomotive Battery Management SystemsMona ValikhaniAinda não há avaliações
- Active Power Control Strategies of DFIG Wind TurbinesDocumento6 páginasActive Power Control Strategies of DFIG Wind TurbinesMona ValikhaniAinda não há avaliações
- Wardruna-Yggdrasil Bio EngDocumento3 páginasWardruna-Yggdrasil Bio EngCristian RamirezAinda não há avaliações
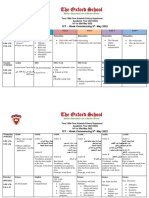
- Term 3 Mid-Term Assessment ScheduleDocumento9 páginasTerm 3 Mid-Term Assessment ScheduleRabia MoeedAinda não há avaliações
- Shear Force and Bending MomentssDocumento32 páginasShear Force and Bending Momentssمحمد شمسAinda não há avaliações
- AS and A Level GraphsDocumento16 páginasAS and A Level GraphsManibalanAinda não há avaliações
- 5 Methods: Mark Bevir Jason BlakelyDocumento21 páginas5 Methods: Mark Bevir Jason BlakelyGiulio PalmaAinda não há avaliações
- Spa IpoDocumento2 páginasSpa IpoJeff E. DatingalingAinda não há avaliações
- Bob Trish Duggan FoundationDocumento19 páginasBob Trish Duggan FoundationWilfried HandlAinda não há avaliações
- Sonnet 39 ArticleDocumento2 páginasSonnet 39 ArticlelalyitaAinda não há avaliações
- Continue: Struggle For Pakistan I H Qureshi PDFDocumento3 páginasContinue: Struggle For Pakistan I H Qureshi PDFDESI Mp350% (2)
- ST Unit2Documento75 páginasST Unit2Abhinav AbzAinda não há avaliações
- What Is The Importance of Research in Language Development?Documento2 páginasWhat Is The Importance of Research in Language Development?Kyle Joshua VerdidaAinda não há avaliações
- Applied LingDocumento11 páginasApplied Lingحسام جدوAinda não há avaliações
- Synthesis of Bicyclo (2.2.l) Heptene Diels-Alder AdductDocumento2 páginasSynthesis of Bicyclo (2.2.l) Heptene Diels-Alder AdductJacqueline FSAinda não há avaliações
- Karrnathi Undead P2Documento2 páginasKarrnathi Undead P2Monjis MonjasAinda não há avaliações
- A Short History of The IsmailisDocumento30 páginasA Short History of The IsmailisAbbas100% (1)
- Mind Map The Process of WritingDocumento1 páginaMind Map The Process of WritingBIBB-0622 NISHA JONGAinda não há avaliações
- Quezon City University 673 Quirino Highway, San Bartolome, Novaliches Quezon City College of Engineering Industrial Engineering DepartmentDocumento10 páginasQuezon City University 673 Quirino Highway, San Bartolome, Novaliches Quezon City College of Engineering Industrial Engineering DepartmentKavin Dela CruzAinda não há avaliações
- QRG DRS3 PDFDocumento5 páginasQRG DRS3 PDFJohn Clark SinguilloAinda não há avaliações
- Restitution of Conjugal RightsDocumento3 páginasRestitution of Conjugal Rightsvalerian fernandesAinda não há avaliações
- Daad-Courses-2019-09-08 6Documento91 páginasDaad-Courses-2019-09-08 6Kaushik RajAinda não há avaliações
- Cs6109 - Compiler Design: Lab AssignmentDocumento8 páginasCs6109 - Compiler Design: Lab AssignmentvezhaventhanAinda não há avaliações
- Chapter 11Documento25 páginasChapter 11Marjorie PuzoAinda não há avaliações
- Karling Aguilera-Fort ResumeDocumento4 páginasKarling Aguilera-Fort Resumeapi-3198760590% (1)
- 2a Group 12 Suggested AnswersDocumento2 páginas2a Group 12 Suggested AnswersRalph John Alipio ValdezAinda não há avaliações
- The Court Cards: Hans Christian AndersenDocumento4 páginasThe Court Cards: Hans Christian Andersenbresail4Ainda não há avaliações
- Application For Counter Claim of The Defendant Under Order 8 RuleDocumento2 páginasApplication For Counter Claim of The Defendant Under Order 8 RuleP SHIVA KUMAR MUDALIARAinda não há avaliações