Você também pode gostar
- Manual Encoder AbsolutoDocumento18 páginasManual Encoder AbsolutooscarAinda não há avaliações
- Manual de Operacion de Central Electronica MB 2011Documento4 páginasManual de Operacion de Central Electronica MB 2011jgpeyAinda não há avaliações
- Probador de MosfetDocumento7 páginasProbador de MosfetAdrian Velasco PenagosAinda não há avaliações
- 05-Variador de Frecuencia RM5GDocumento40 páginas05-Variador de Frecuencia RM5GPablo HernandezAinda não há avaliações
- GEZE Bedienungsanleitung BHB ES 808449Documento24 páginasGEZE Bedienungsanleitung BHB ES 808449Joselyn CalelAinda não há avaliações
- Interruptor InalambricoDocumento3 páginasInterruptor InalambricoAnderson Agredo MesaAinda não há avaliações
- Display Barra y Matrices LEDDocumento1 páginaDisplay Barra y Matrices LEDsaulin1965Ainda não há avaliações
- Spanish Elite Rev GDocumento85 páginasSpanish Elite Rev GJose EspinaqueAinda não há avaliações
- Placa Ppa Facility 4T P22606 Modo AnalogicoDocumento6 páginasPlaca Ppa Facility 4T P22606 Modo AnalogicoSergio DizAinda não há avaliações
- Adaptar Magnetron A Horno Micro On DasDocumento7 páginasAdaptar Magnetron A Horno Micro On DasMaría Tejedor100% (2)
- Apuntes de Variadores de OmronDocumento33 páginasApuntes de Variadores de OmronNabil Mohamed AmarAinda não há avaliações
- Contactores MelcoDocumento44 páginasContactores MelcoRobert WrightAinda não há avaliações
- SLC 500 Manua de Instalacion y Operacion LibreDocumento240 páginasSLC 500 Manua de Instalacion y Operacion LibrecarlosAinda não há avaliações
- Sensores InductivosDocumento33 páginasSensores InductivosIgnacio Loyola Camacho100% (1)
- Manual de Usuario PICkit 2 CloneDocumento16 páginasManual de Usuario PICkit 2 CloneWilliams FernandezAinda não há avaliações
- 3e Atlas-AcelcoDocumento12 páginas3e Atlas-AcelcoHector martin ChieffoAinda não há avaliações
- Variadores BonfiglioliDocumento60 páginasVariadores BonfigliolilalyringoAinda não há avaliações
- CTA ManiobrasDocumento54 páginasCTA ManiobrasMarcos Pérez100% (1)
- Manual Termostato Coati 12655esp PDFDocumento16 páginasManual Termostato Coati 12655esp PDFasteriscoAinda não há avaliações
- Información de Producto: IP 3 59 R 2 A4000 - Interfase Autónoma de SeñalizaciónDocumento6 páginasInformación de Producto: IP 3 59 R 2 A4000 - Interfase Autónoma de Señalizaciónjuan bautista vezzosiAinda não há avaliações
- Manual Del Usuario CEA 32Documento45 páginasManual Del Usuario CEA 32Leo Dos RamosAinda não há avaliações
- Implementación de comunicación RS485 con PIC18F4550Documento29 páginasImplementación de comunicación RS485 con PIC18F4550Mario Andres Caceres NoceraAinda não há avaliações
- CONTROLADOR ELECTRONICO DE ASCENSOR CEA10 Versión 1Documento5 páginasCONTROLADOR ELECTRONICO DE ASCENSOR CEA10 Versión 1kleisyaragortAinda não há avaliações
- TugelaDocumento14 páginasTugelaAlberto ChoqueAinda não há avaliações
- Variador EmersonDocumento58 páginasVariador EmersonDavid Lemos Sanchez100% (1)
- W363 ES2 01 CQM1H Manual OperacionDocumento210 páginasW363 ES2 01 CQM1H Manual OperacionZEUS2405Ainda não há avaliações
- Ma DR F5-Inst-D-20120298 EsDocumento44 páginasMa DR F5-Inst-D-20120298 EsElputoAmo XDAinda não há avaliações
- MV Elevador de 4 PisosDocumento12 páginasMV Elevador de 4 PisosIvan AlanisAinda não há avaliações
- Pantalla LCD de CaracteresDocumento13 páginasPantalla LCD de CaracteresDavid Uno Dos100% (2)
- Vol 4Documento32 páginasVol 4SebastianAinda não há avaliações
- Esquemas Electricos Acabado (16 Setiembre) FinDocumento8 páginasEsquemas Electricos Acabado (16 Setiembre) Finmarco leonAinda não há avaliações
- Como Hacer El Auto Ajuste en El Operador de Puerta Del Dong Yang Tke Caja AzulDocumento1 páginaComo Hacer El Auto Ajuste en El Operador de Puerta Del Dong Yang Tke Caja AzulJms QuinteroAinda não há avaliações
- Instructivo RescateDocumento2 páginasInstructivo RescateGustavo Jorquera San MartínAinda não há avaliações
- Vol 2Documento40 páginasVol 2SebastianAinda não há avaliações
- Zetadyne PDFDocumento120 páginasZetadyne PDFSatheesh RamaAinda não há avaliações
- Manual Altivar 71Documento258 páginasManual Altivar 71Marlon Paul Oblitas MendozaAinda não há avaliações
- Yaskawa - Manual j7 (Es)Documento125 páginasYaskawa - Manual j7 (Es)jaiversAinda não há avaliações
- Entradas y Salidas de Un PLCDocumento6 páginasEntradas y Salidas de Un PLCJosue DomínguezAinda não há avaliações
- Memorias RomDocumento15 páginasMemorias RomGerardo GomezAinda não há avaliações
- Ups Orange KolffDocumento6 páginasUps Orange KolffGian Lucas Abad MontenegroAinda não há avaliações
- Controladores Lógico Programable: Simulación de circuitos de control, potencia y programación LadderDocumento14 páginasControladores Lógico Programable: Simulación de circuitos de control, potencia y programación Laddernohemy condo machaca100% (1)
- CFW500 AplicativoDocumento12 páginasCFW500 AplicativoPablo OlmedoAinda não há avaliações
- Simulador Omega CL309 A.en - Es PDFDocumento12 páginasSimulador Omega CL309 A.en - Es PDFKerly ZapataAinda não há avaliações
- DLP Uart-TxDocumento5 páginasDLP Uart-Txuly14Ainda não há avaliações
- Esquema de la Dinamo: Excitación Independiente y AutoexcitaciónDocumento6 páginasEsquema de la Dinamo: Excitación Independiente y AutoexcitaciónRodolfo CalvoAinda não há avaliações
- Uso Del Microcontrolador PIC16F877A para El Control Del Elevador de Un Edificio de 5 PlantasDocumento49 páginasUso Del Microcontrolador PIC16F877A para El Control Del Elevador de Un Edificio de 5 PlantasHALCOCERAinda não há avaliações
- Apunte-N°4 FiltrosDocumento6 páginasApunte-N°4 FiltrosFausto Aaron EchegoyenAinda não há avaliações
- Ascensor DidacticoDocumento6 páginasAscensor DidacticoLuis PrunaAinda não há avaliações
- Go30 Manual PDFDocumento11 páginasGo30 Manual PDFCarlosAinda não há avaliações
- Aplicaciones ElementalesDocumento9 páginasAplicaciones ElementalesPaul GálvezAinda não há avaliações
- Contactor TeoriaDocumento14 páginasContactor TeoriaYvala Zamora PercyAinda não há avaliações
- Configuracion Invt Che-100Documento1 páginaConfiguracion Invt Che-100Kevin Silva GuillenAinda não há avaliações
- Manual para Crear Bot en Telegram ESP32Documento2 páginasManual para Crear Bot en Telegram ESP32Yexalen RodriguezAinda não há avaliações
- Encoders ÓpticosDocumento13 páginasEncoders ÓpticosAlex Toapanta SotoAinda não há avaliações
- EncodersDocumento10 páginasEncodersFrancisco OrtizAinda não há avaliações
- 4-Sensores AngularesDocumento5 páginas4-Sensores AngularesCarlos Mario Jimenez HernandezAinda não há avaliações
- Informe Encoder Medidor de RPMDocumento8 páginasInforme Encoder Medidor de RPMDaniel Eduardo AnasiAinda não há avaliações
- Encoders ópticos y reglas magnéticas: principios y aplicacionesDocumento10 páginasEncoders ópticos y reglas magnéticas: principios y aplicaciones22guillo22Ainda não há avaliações
- Práctica #8Documento19 páginasPráctica #8Ruben RodriguezAinda não há avaliações
- Encoder SDocumento3 páginasEncoder SAlex ToledoAinda não há avaliações
- Monte Carlo Calculo de PiDocumento1 páginaMonte Carlo Calculo de PiFuerzaRoja25Ainda não há avaliações
- Programa Palindormo.cDocumento2 páginasPrograma Palindormo.cFuerzaRoja25Ainda não há avaliações
- Diccionario de PruebaDocumento2 páginasDiccionario de PruebaFuerzaRoja25Ainda não há avaliações
- Arch IvoDocumento2 páginasArch IvoFuerzaRoja25Ainda não há avaliações
- Guía de Uso PID para ArduinoDocumento28 páginasGuía de Uso PID para ArduinoWashington Quevedo100% (1)
- Programa Pila CDocumento1 páginaPrograma Pila CFuerzaRoja25Ainda não há avaliações
- Divider Abel-Hdl PDFDocumento1 páginaDivider Abel-Hdl PDFFuerzaRoja25Ainda não há avaliações
- 04 Generador TriangularDocumento6 páginas04 Generador TriangularArlés Gómez100% (1)
- Guia de Iniciacion en LabVIEWDocumento42 páginasGuia de Iniciacion en LabVIEWMiguel Leon BustosAinda não há avaliações
- Diseño de fuente de voltaje regulada con rectificador de onda completa y diodo Zener de 12V y 0.5ADocumento8 páginasDiseño de fuente de voltaje regulada con rectificador de onda completa y diodo Zener de 12V y 0.5AJhon Henry Arreaga CarpioAinda não há avaliações
- Divisor de Voltaje y Divisor de CorrienteDocumento7 páginasDivisor de Voltaje y Divisor de CorrienteJosé David Pérez BetancourtAinda não há avaliações
- Revista TeoriaDocumento10 páginasRevista TeoriaDianaPuertoAinda não há avaliações
- Precio FlukeDocumento16 páginasPrecio FlukeluisAinda não há avaliações
- Universidad Nacional Del Altiplano PunoDocumento18 páginasUniversidad Nacional Del Altiplano PunoLane ClaudioAinda não há avaliações
- Calculo de Autonomia. Site ChacasDocumento8 páginasCalculo de Autonomia. Site ChacasCristhian LlanosAinda não há avaliações
- Balotario de Comunicaciones ElectronicasDocumento11 páginasBalotario de Comunicaciones ElectronicasRichard GarciaAinda não há avaliações
- Informe de Pasantías LISTO PDFDocumento113 páginasInforme de Pasantías LISTO PDFHorteiliz75% (4)
- Isefa Contenidos 1.1Documento97 páginasIsefa Contenidos 1.1Jorge Alberto Mendoza PérezAinda não há avaliações
- Radiador PasivoDocumento20 páginasRadiador PasivoDavid BenavidesAinda não há avaliações
- Capítulo I - Física de La RadiaciónDocumento24 páginasCapítulo I - Física de La RadiaciónRafael Rguez. DíazAinda não há avaliações
- Descripción y Cálculo Mecánico de Redes en Media TensiónDocumento6 páginasDescripción y Cálculo Mecánico de Redes en Media TensiónAnonymous j4Z01fGzAinda não há avaliações
- Instalación Eléctrica de Un Complejo Hospitalario - Enrique - Lozano - Martinez PDFDocumento349 páginasInstalación Eléctrica de Un Complejo Hospitalario - Enrique - Lozano - Martinez PDFestttAinda não há avaliações
- Examen BalotarioDocumento3 páginasExamen BalotarioSamir Ricra MonteroAinda não há avaliações
- Prácticas ArduinoDocumento12 páginasPrácticas ArduinoMartín Banciella OzoresAinda não há avaliações
- P1 BioelectronicaDocumento7 páginasP1 BioelectronicaBarajas AlessoAinda não há avaliações
- Lab06 Transistor Bipolar TERMINADODocumento17 páginasLab06 Transistor Bipolar TERMINADOGonzalo William Pereyra BarretoAinda não há avaliações
- Unidad 1Documento39 páginasUnidad 1Brenda Esther IbarraAinda não há avaliações
- Contador 555Documento11 páginasContador 55515 Haros Gutierrez Jessica MayteAinda não há avaliações
- Tesis Comunicacion Laser - Comunicaciones y ElectronicaDocumento101 páginasTesis Comunicacion Laser - Comunicaciones y ElectronicaMar Lopez Cruz IvanAinda não há avaliações
- Expediente Luz Del Sur (Inicio de Obra) Revisión 01Documento36 páginasExpediente Luz Del Sur (Inicio de Obra) Revisión 01Erick Lasteros Manzaneda100% (1)
- Uii e y e Ind I12Documento14 páginasUii e y e Ind I12Raul VazquezAinda não há avaliações
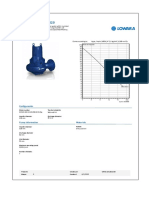
- Sumidero 1310S-50X.263.S62.220 PDFDocumento5 páginasSumidero 1310S-50X.263.S62.220 PDFSergio ZegarraAinda não há avaliações
- Ayudantia 18 FIS1533Documento1 páginaAyudantia 18 FIS1533Cristian Augusto Valdes PimentelAinda não há avaliações
- Tema 4 Motores Eléctricos y ElectrónicosDocumento19 páginasTema 4 Motores Eléctricos y ElectrónicosJoaquin Ayarde GutiérrezAinda não há avaliações
- Yahoo Mail - Verificaciones en Mantenimiento para Sistema Sapphire Del CPDA MaracaiboDocumento2 páginasYahoo Mail - Verificaciones en Mantenimiento para Sistema Sapphire Del CPDA MaracaibodannyAinda não há avaliações
- BFSK, MSK y GMSKDocumento6 páginasBFSK, MSK y GMSKCLaudia FernándezAinda não há avaliações
- Mantto Tablero ElectricoDocumento56 páginasMantto Tablero ElectricoJuan JoseAinda não há avaliações
- Electricista Industrial 201210Documento126 páginasElectricista Industrial 201210Joe Tguerra100% (2)
- 2.2.4.6 Video - Computer Disassembly PDFDocumento3 páginas2.2.4.6 Video - Computer Disassembly PDFNicolas RamosAinda não há avaliações