Escolar Documentos
Profissional Documentos
Cultura Documentos
Tesis Alcaide Final
Enviado por
Noe ApDireitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Tesis Alcaide Final
Enviado por
Noe ApDireitos autorais:
Formatos disponíveis
Instituto Tecnolgico de Morelia
DIVISIN DE ESTUDIOS DE POSGRADO E INVESTIGACIN
PROGRAMA DE GRADUADOS E INVESTIGACIN EN INGENIERA ELCTRICA
MODELADO DE ESQUEMAS DE
PROTECCIN DE LNEAS DE
TRANSMISIN UTILIZANDO
ONDAS VIAJERAS
T E S I S
Que para obtener el grado de
Maestro en Ciencias en Ingeniera Elctrica
Presenta
Boris Adrin Alcaide Moreno
Director de tesis
Dr. Jos Leonardo Guardado Zavala
Morelia, Michoacn, Mxico. Junio, 2008.
DEDICATORIA
Dedico este trabajo a Dios, a mis padres Imelda Moreno y Benjamn Alcaide quienes me
han brindado su apoyo incondicional a lo largo de mi vida, les agradezco inmensamente su
confianza.
A mis hermanos Jorge, Josefina y Benjamn.
A mis sobrinos Luis, Karime y Aylin.
AGRADECIMIENTOS
Me gustara expresar mi ms sincero agradecimiento al Dr. Jos Leonardo Guardado
Zavala, sin cuya valiosa colaboracin y apoyo tcnico no habra sido posible llevar a
trmino este trabajo.
A todos los profesores del programa de graduados de Ingeniera Elctrica del ITM que
contribuyeron en mi formacin.
A mis compaeros y amigos de la maestra quienes han hecho de estos dos aos una grata
experiencia.
Al Dr. Ernesto Vzquez Martnez por los consejos y asistencia para completar mi
investigacin.
Al apoyo financiero brindado por CONACYT que hizo posible la realizacin de mis
estudios de postgrado.
Y a todas aquellas personas que contribuyeron a lograr esta meta personal y profesional.
Gracias
Boris Adrin Alcaide Moreno
Junio 2008.
RESUMEN
Las lneas de transmisin de son diseadas para transferir grandes cantidades de potencia
de un lugar a otro. La mayora de las fallas que ocurren en un sistema elctrico de potencia
son en lneas de transmisin debido a que estn expuestas al medio ambiente. Para mejorar
la estabilidad de un sistema elctrico de potencia y evitar daos permanentes en equipo, es
importante liberar rpidamente las fallas que suceden en una lnea de transmisin
utilizando para ello un sistema de proteccin de alta velocidad. Los mtodos
convencionales de deteccin de fallas en lneas de transmisin de EHV estn
principalmente basados en tcnicas de medicin de impedancia, sin embargo, estos
relevadores necesitan al menos un ciclo de la frecuencia fundamental para llevar a cabo su
operacin.
Cuando sucede una falla en una lnea de transmisin se generan seales de alta frecuencia
conocidas como ondas viajeras, estas seales proveen informacin acerca del disturbio en
la lnea y se pueden utilizar para detectar fallas de manera rpida. Sin embargo, los
esquemas de proteccin basados en ondas viajeras tienen problemas de confiabilidad y no
han sido bien aceptados a pesar de su rpida capacidad de deteccin (menor a un cuarto de
ciclo) de fallas.
En este trabajo de tesis se desarrollan esquemas de proteccin basados en ondas viajeras.
Inicialmente, se analiza el fenmeno de propagacin de las ondas viajeras en lneas de
transmisin. Posteriormente, se desarrollan los modelos de los algoritmos para las distintas
tareas del esquema de proteccin como lo son: deteccin, discriminacin direccional,
clasificacin y localizacin de la falla utilizando MODELS de ATP - EMTP (Alternative
Transients Program). Posteriormente, se propone un mtodo de clasificacin basado en la
capacidad de deteccin de falla de los modos areos y de tierra de las distintas matrices de
transformacin y se analizan diversas tcnicas de localizacin de fallas. Por ltimo se hace
un anlisis del comportamiento del esquema de proteccin ante lneas de transmisin con
compensacin serie fija. Los resultados indican que a travs de estos esquemas se mejora la
velocidad de deteccin de fallas mientras se mantiene un nivel de confiabilidad aceptable.
ABSTRACT
Transmission lines are designed to transfer large amounts of power from one location to
another. The length exposed to the environment is a major reason for the occurrence of
faults in the lines. For the stability of the electrical network, and for the avoidance of
permanent damage of the equipment, it is important to clear faults on high voltage
transmission lines quickly with the aid of high speed protection system. The conventional
methods of fault detection are mainly based on impedance measurement techniques,
however, these relays need at least one fundamental frequency cycle for performing the
protection operation.
Fault generated transients or travelling wave signals provide the very first information
about a possible disturbance in the line and hence they can be used to detect faults very
quickly. However travelling wave based protection schemes have reliability issues and have
not been well accepted by relay engineers despite their fast fault detection capabilities.
In this thesis, Ultra High Speed distance protection schemes based on traveling wave
techniques were developed. First, the travelling wave phenomena on transmission lines
were analyzed. Then, computer algorithms with the different tasks of the protection
scheme: detection, directional discrimination, classification and location of the fault in
overhead transmission lines were developed. These models were developed in the
MODELS section of the ATP/EMTP program. Fault simulations were carried out in ATP
in a three-phase transmission line.
A method of classification based on the capacity of fault detection of air and earth modes of
the different modal transformation matrices were proposed. Then different fault location
techniques were analyzed. Finally an analysis of the behavior of the protection scheme is
made for transmission lines with fixed series compensation. The results indicate that the
fault detection speed is improved while maintaining a high reliability level.
viii
NDICE GENERAL
RESUMEN vi
ABSTRACT vii
NDICE GENERAL viii
ABREVIATURAS Y NOMENCLATURAS xiii
NDICE DE FIGURAS xv
NDICE DE TABLAS xxi
CAPTULO 1. INTRODUCCIN
1.1 Proteccin de Sistemas de Potencia.
1.1.1 Caractersticas funcionales de un sistema de proteccin.
1.1.2 Localizacin de fallas en lneas de transmisin.
1.2 Tcnicas de Deteccin y Localizacin de fallas en lneas de
transmisin.
1.3 Revisin Bibliogrfica.
1.4 Objetivos.
1.5 Justificacin.
1.6 Estructura de la tesis.
1
4
6
7
11
13
14
15
CAPTULO 2. LNEAS DE TRANSMISIN
2.1 Introduccin a los Sistemas Elctricos de Potencia.
2.1.1 Estructuras de lneas de transmisin.
2.1.2 Tipos de Conductores.
2.1.3 Hilos de guarda.
2.1.4 Transposiciones.
2.2 Teora de Lneas de Transmisin.
2.2.1 Ecuaciones de la Lnea de Transmisin.
17
18
19
20
21
22
ix
2.2.2 Transformacin modal
2.3 Propagacin de Ondas Viajeras en Lneas de Transmisin.
2.3.1 Ecuaciones de Onda Viajera.
2.3.2 Parmetros elctricos.
2.3.2.1 Clculo de los parmetros elctricos
2.3.2.2 Power_lineparam
2.3.3 Reflexin y Refraccin de Ondas Viajeras.
2.3.4 Ondas viajeras en terminaciones de la lnea.
2.3.4.1 Lnea terminada en corto circuito.
2.3.4.2 Lnea terminada en circuito abierto.
2.3.4.3 Lnea terminada en resistencia.
2.3.4.4 Otros tipos de terminaciones.
2.4 Conclusiones del captulo.
25
30
38
40
41
47
51
52
53
54
54
56
CAPTULO 3. DETECCIN Y DISCRIMINACIN DIRECCIONAL DE LA FALLA.
3.1 Introduccin.
3.2 Principio de operacin del esquema de proteccin de Ondas Viajeras.
3.2.1 Principio de superposicin (Seales incrementales)
3.2.2 Ondas Viajeras
3.2.3 Transformacin modal
3.3 Deteccin y discriminacin direccional de la falla.
3.3.1 Funciones de deteccin y discriminacin de falla de Michels.
3.4 Comportamiento de S
1
y S
2
ante diferentes tipos de falla y
transformaciones modales.
3.4.1 Transformacin de Karrenbauer
3.4.2 Transformacin de Clarke
3.4.3 Transformacin de Wedephol
3.5 Conclusiones del captulo.
57
60
60
63
66
70
70
80
80
84
87
91
x
CAPTULO 4. CLASIFICACIN DE LA FALLA.
4.1 Introduccin
4.2 Algoritmo de clasificacin de fallas
4.3 Resultados del algoritmo de clasificacin de fallas.
4.4 Conclusiones del captulo.
92
100
102
103
CAPTULO 5. LOCALIZACIN DE FALLAS MEDIANTE ALGORITMOS DE ONDA
VIAJERA.
5.1 Introduccin
5.2 Filtro de Secuencias
5.2.1 Extraccin de Ondas Viajeras
5.2.2 Localizacin de Fallas utilizando Filtro de Secuencia
5.2.3 Algoritmo
5.2.4 Resultados obtenidos
5.2.4.1 Bajo ngulo de insercin de la falla (pow 0)
5.2.4.2 Falla de alta impedancia
5.2.4.3 Fallas cercanas al relevador y en el bus remoto
5.3 Localizador tipo D con sincronizacin va GPS.
5.3.1 Resultados del localizador tipo D con sincronizacin va GPS
5.3.1.1 Fallas con bajo ngulo de insercin.
5.3.1.2 Fallas de alta impedancia
5.3.1.3 Fallas cercanas al relevador.
5.4 Localizador tipo D con muestras de corriente y sincronizacin
va GPS.
5.5 Algoritmo de correlacin
5.5.1 Principio de funcionamiento del algoritmo de correlacin
5.5.2 Resultados del algoritmo de correlacin.
5.5.2.1 Bajo ngulo de insercin de la falla (pow 0)
5.5.2.2 Falla de alta impedancia
104
106
106
109
111
114
115
116
116
116
118
121
122
123
124
126
128
130
133
133
xi
5.5.2.3 Fallas cercanas al relevador o al bus remoto
5.6 Funcin de correlacin auxiliar
5.6.1 Estrategia de la funcin de correlacin auxiliar
5.6.2 Resultados de la tcnica de correlacin auxiliar.
5.7 Reconocimiento de patrones
5.7.1 Distancia de Manhattan y distancia Euclidiana
5.7.2 Funcin compuesta
5.7.3 Resultados distancia de Manhattan, Euclidiana y funcin
Compuesta.
5.7.3.1 Bajo ngulo de insercin de la falla (pow 0)
5.7.3.2 Falla de alta impedancia
5.7.3.3 Fallas cercanas al relevador y al bus remoto
5.8 Conclusiones del captulo.
135
135
135
137
138
140
141
141
143
143
144
145
CAPTULO 6. EFECTOS DE LA COMPENSACIN SERIE FIJA EN ALGORITMOS DE
ONDAS VIAJERAS.
6.1 Introduccin.
6.2 Casos de estudio.
6.2.1 Localizador tipo D con sincronizacin va GPS.
6.2.2 Filtro de Secuencias.
6.2.3 Reconocimiento de Patrones (Funcin Compuesta).
6.3 Conclusiones del captulo.
146
149
151
152
153
155
CAPTULO 7. CONCLUSIONES, APORTACIONES Y TRABAJOS FUTUROS.
7.1 Introduccin
7.2 Conclusiones generales
7.2 Aportaciones realizadas
7.3 Recomendaciones para trabajos futuros
157
157
158
160
xii
APNDICES
A. Configuracin y Parmetros de la Lnea de Transmisin.
A.1 Calculo de los parmetros elctricos de la lnea de transmisin en
Matlab utilizando Power_lineparam.
B. Modelado de Lneas de Transmisin y fallas en Sistemas Elctricos de
Potencia en ATP/EMTP.
B.1 Introduccin.
B.2 Modelado de lneas de transmisin en ATP/EMTP.
B.3 Modelado de fallas en lneas de transmisin.
B.4 Models.
162
163
166
167
171
173
REFERENCIAS BIBLIOGRFICAS 174
xiii
ABREVIATURAS Y NOMENCLATURAS
EHV
UHV
ATP
SEP
PMU
TSC
FACTS
GPS
DFT
TW
ACSR
AAC
AAAC
T
R
ii
R
ik
L
ii
L
ik
P
ii
P
ik
GMR
Vp v u
Zc
v(t)
v(t)
i(t)
Extra Alto Voltaje
Ultra Alto Voltaje
Alternative Transient Program
Sistema Elctrico de Potencia
Unidad de Medicin de Fasores
Thyristor Switched Capacitor
Sistemas Flexibles de Transmisin de la energa elctrica en Corriente
Alterna
Sistema de Posicionamiento Global
Transformada Discreta de Fourier
Transformada Wavelet
Cable de Aluminio con Alma de Acero
Todos los conductores de Aluminio
Todos los conductores de Aleacin de Aluminio
Matriz de transformacin
Resistencia propia
Resistencia mutua
Inductancia propia
Inductancia mutua
Coeficiente de potencial propio
Coeficiente de potencial mutuo
Radio Medio Geometrico
Velocidad de propagacin de la onda viajera
Impedancia Caracterstica de la lnea de transmisin
Seal incremental de voltaje
Voltaje de post-falla
Seal incremental de corriente
xiv
i(t)
v(t)
i (t)
S
1
S
2
d
f
d
r
S, Q
D
S1S2
a
dE
dM
C
X
L
L
k
Xc
Corriente de post-falla
Voltaje de pre-falla
Corriente de pre-falla
Seal de Onda Viajera Progresiva
Seal de Onda Viajera Regresiva
Funcin de discriminacin Progresiva
Funcin de discriminacin Regresiva
Matrices de Transformacin
Distancia a la falla
Funcin de correlacin estndar
Funcin de correlacin auxiliar
Funcin distancia Euclidiana
Funcin distancia Manhattan
Funcin compuesta
Reactancia inductiva equivalente por unidad de longitud
Longitud de la lnea de transmisin
Grado de compensacin
Reactancia capacitiva equivalente por unidad de longitud
xv
NDICE DE FIGURAS
FIGURA DESCRIPCIN PAGINA
1.1
1.2
1.3
1.4
2.1
2.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
2.10
2.11
2.12
2.13
2.14
2.15
Zonas de proteccin.
Avance del principio de funcionamiento y tecnologas de
relevadores de proteccin.
Clasificacin de las tcnicas de localizacin.
Clasificacin de las tcnicas de localizacin.
Sistema elctrico de potencia.
Un circuito horizontal.
Tipo delta.
Doble circuito vertical.
Torre de transmisin con circuito horizontal.
Representacin de una lnea de transmisin trifsica con retorno
por tierra.
Circuito equivalente por unidad de longitud para una lnea de
transmisin trifsica.
Modelo de parmetros distribuidos de una lnea de transmisin.
(a) seccin de lnea (b) lnea de transmisin.
Modelo de parmetros distribuidos para una lnea con perdidas.
Imagen de los conductores.
Interface Grafica de Usuario (GUI) Power_lineparam
Descripcin de la geometra de la lnea y caracterstica de los
conductores.
Parmetros elctricos RLC de la lnea de transmisin.
Componentes simtricas RLC.
a) Lnea con diferente impedancia. b) Direccin de ondas de
corriente en una lnea con diferente impedancia.
3
7
7
8
17
18
18
18
19
21
22
30
35
39
42
43
46
46
48
xvi
3.1
3.2
3.3
3.4
3.5
3.6
3.7
3.8
3.9
3.10
3.11
3.12
3.13
3.14
3.15
3.16
3.17
3.18
3.19
3.20
Principio de superposicin aplicado a una red fallada.
Seal incremental de voltaje
Diagrama de Bewley Lattice de los frentes de onda generados por
una falla.
Seales de relevador S
1
(m)
y S
2
(m)
, falla AB. a) S
1,2
(0)
b) S
1,2
(1)
c) S
1,2
(2)
Seales de relevador S
1
(m)
y S
2
(m)
, falla AB-G. a) S
1,2
(0)
b) S
1,2
(1)
c) S
1,2
(2)
Seales de relevador S
1
(1)
y S
2
(1)
. a) POW=180 b) POW=270
Seales de relevador d
f
(1)
y d
r
(1)
. a) POW=180 b) POW=270
Criterio de deteccin de falla en lneas de transmisin utilizando
Ondas Viajeras.
Funciones de discriminacin d
f
y d
r
. a) Falla detrs del relevador
b) zoom del inciso a. c) falla detrs del relevador.
Sistema de prueba 1.
Seales d
f
y d
r
. a) dentro de la zona de proteccin c) delante de
la zona de proteccin.
Funciones de discriminacin d
f
y d
r
. a,b) dentro de la zona de
proteccin c,d) atrs de la zona de proteccin.
Sistema de prueba 1 simulado en ATP/EMTP.
Sistema de prueba 2.
Funciones de discriminacin d
f
y d
r
.
Funciones de discriminacin d
f
y d
r
.
Sistema de prueba 2 simulado en ATP/EMTP.
Falla A-G. a) Funciones S
1
y S
2
modo 1. b) Funciones S
1
y S
2
modo 2. c) Funciones d
f
y d
r
modo 1. d) Funciones d
f
y d
r
modo 2.
Falla B-G. a) Funciones S
1
y S
2
modo 1. b) Funciones S
1
y S
2
modo 2. c) Funciones d
f
y d
r
modo 1. d) Funciones d
f
y d
r
modo 2.
Falla C-G. a) Funciones S
1
y S
2
modo 1. b) Funciones S
1
y S
2
modo 2. c) Funciones d
f
y d
r
modo 1. d) Funciones d
f
y d
r
modo 2.
61
63
64
69
70
71
72
72
73
74
75
76
76
77
78
79
80
81
82
83
xvii
3.21
3.22
3.23
3.24
3.25
3.26
4.1
4.2
4.3
4.4
4.5
4.6
4.7
4.8
4.9
4.10
4.11
4.12
4.13
5.1
5.2
5.3
5.4
Falla B-G. a) Funciones S
1
y S
2
modo 1. b) Funciones S
1
y S
2
modo 2. c) Funciones d
f
y d
r
modo 1. d) Funciones d
f
y d
r
modo 2.
Falla BC. a) Funciones S
1
y S
2
modo 1. b) Funciones S
1
y S
2
modo
2. c) Funciones d
f
y d
r
modo 1. d) Funciones d
f
y d
r
modo 2.
Falla A-G. a) Funciones S
1
y S
2
modo 1. b) Funciones S
1
y S
2
modo 2. c) Funciones d
f
y d
r
modo 1. d) Funciones d
f
y d
r
modo 2.
Falla A-G. a) Funciones S
1
y S
2
modo 1. b) Funciones S
1
y S
2
modo 2. c) Funciones d
f
y d
r
modo 1. d) Funciones d
f
y d
r
modo 2.
Falla B-G. a) Funciones S
1
y S
2
modo 1. b) Funciones S
1
y S
2
modo 2. c) Funciones d
f
y d
r
modo 1. d) Funciones d
f
y d
r
modo 2.
Falla AC. a) Funciones S
1
y S
2
modo 1. b) Funciones S
1
y S
2
modo 2. c) Funciones d
f
y d
r
modo 1. d) Funciones d
f
y d
r
modo 2.
Modo [0] Falla A-G. a) Seales S
1
y S
2
b) Seales d
f
y d
r
Modo [0] Falla B-G. a) Seales S
1
y S
2
b) Seales d
f
y d
r
Modo [0] Falla C-G. a) Seales S
1
y S
2
b) Seales d
f
y d
r
Modo [0] Falla AB-G. a) Seales S
1
y S
2
b) Seales d
f
y d
r
Modo [0] Falla AC-G. a) Seales S
1
y S
2
b) Seales d
f
y d
r
Modo [0] Falla BC-G. a) Seales S
1
y S
2
b) Seales d
f
y d
r
Modo [0] Falla AB. a) Seales S
1
y S
2
b) Seales d
f
y d
r
Modo [0] Falla AC. a) Seales S
1
y S
2
b) Seales d
f
y d
r
Modo [0] Falla BC. a) Seales S
1
y S
2
b) Seales d
f
y d
r
Modo [0] Falla ABC. a) Seales S
1
y S
2.
b) Seales d
f
y d
r
Modo [0] Falla ABC-G. a) Seales S
1
y S
2
b) Seales d
f
y d
r
Seales Z1=(Ia+Ib)/3, Z2=(Ia+Ic)/3, Z3=(Ib+Ic)/3 e I
0
a) Falla
AB-G b) Falla AC-G c) Falla BC-G.
Sistema de prueba utilizado en la simulacin.
Diagrama de bloques del relevador de Ondas viajeras.
Seal de voltaje debida a Ondas Viajeras
Respuesta a la frecuencia del filtro de secuencias de tres muestras.
Salida del filtro de secuencias de tres muestras.
84
85
86
87
88
89
92
93
93
93
94
94
94
95
95
95
96
99
102
106
107
108
109
xviii
5.5
5.6
5.7
5.8
5.9
5.10
5.11
5.12
5.13
5.14
5.15
5.16
5.17
5.18
5.19
5.20
5.21
5.22
5.23
5.24
5.25
5.26
5.27
Propagacin de ondas viajeras en un sistema de potencia
Salida del filtro de secuencias en el relevador Ra
Diagrama de flujo del mtodo de Filtro de Secuencias.
Sistema de prueba 3.
Principio de operacin del sistema del localizar tipo D.
Modelos del localizador tipo D con GPS en ATP/EMTP.
Seales del Relevador 1. POW=120. a) Voltajes b) Corrientes.
Seales del Relevador 2. POW=120. a) Voltajes b) Corrientes.
a) Seales d
f1
y d
r1
T
1
= 0.0182 Seg b) Seales d
f2
y d
r2
T
2
=0.01845 Seg
Distancias obtenidas por los relevadores, Rel1=63.44km y
Rel2=136.56km
Voltajes medidos en el punto de falla.
Ondas viajeras vistas por el relevador 1. a) Seales S
1
y S
2
b) d
f
y d
r
.
Ondas viajeras vistas por el relevador 2. a) Seales S
1
y S
2
b) d
f
y d
r
.
Distancia a la falla calculada por el Relevador 1 y 2.
a) Seales d
f
y d
r
Relevador 1. b) Seales d
f
y d
r
Relevador 2.
c) Distancia a la falla calculada por el Relevador 1 y 2.
Sistema de potencia.
Modelo del relevador de onda viajera en ATP/EMTP.
Diagrama de Bewley lattice
Seales S
1
y S
2
para una falla AB-G a 80km del relevador.
A) Seales S
2
y S
1
(desplazada n muestras) B) Seales S
2
y S
1
(mxima correlacin) C) Funcin de correlacin.
Distancia a la falla calculada por ATP/EMTP. D
falla
= 78.599km
Modelo del relevador de O.V. en ATP/EMTP.
R
Falla
= 100 a) Funcin de Correlacin b) Resultado ATP.
D
Falla
= 40.213km
109
110
113
114
117
118
118
119
119
120
121
121
122
122
123
124
126
129
130
131
132
133
133
xix
5.28
5.29
5.30
5.31
5.32
5.33
5.34
5.35
5.44
6.1
6.2
6.3
6.4
6.5
6.6
6.7
6.8
R
Falla
= 200 a) Funcin de Correlacin b) Resultado ATP.
D
Falla
= 40.213km
R
Falla
= 500 a) Funcin de Correlacin b) Resultado ATP.
D
Falla
= 40.213km
R
Falla
= 600 a) Funcin de Correlacin b) Resultado ATP.
D
Falla
= 146.23km
Tiempos T
1
, T
2
y T
3
calculados por el algoritmo en ATP/EMTP.
Resultados D
e1
=126.12 y D
e2
=60.32
Salida de la funcin de correlacin en un tiempo
T
1
+(T
2
-T
3
)=0.02575.
Modelo del relevador de O.V de Reconocimiento de patrones en
ATP/EMTP.
Resultados de la simulacin en ATP/EMTP. a) R
falla
=500
b) R
falla
=600
Resultados de la simulacin en ATP/EMTP. a) R
falla
=1K
b) R
falla
=1.2K
Parmetros elctricos de la lnea de transmisin en
Power_lineparam
Sistema de Potencia con Compensacin Serie Fija.
Fallas AB-G a 150km del relevador. a) Seales S
1
y S
2
b) Seales
d
f
y d
r
Fallas AB-G a 150km, despus del capacitor. Compensacin al
25% a) Seales S
1
y S
2
b) Seales d
f
y d
r
Fallas AB-G a 150km, despus del capacitor. Compensacin al
50% a) Seales S
1
y S
2
b) Seales d
f
y d
r
Fallas AB-G a 150km, despus del capacitor. Compensacin al
75% a) Seales S
1
y S
2
b) Seales d
f
y d
r
Seales d
f
y d
r
a) Relevador 1 (T1=0.022675) b) Relevador 2
(T2=0.02235)
Resultado obtenido por el relevador en ATP/EMTP.
134
134
134
137
137
138
141
144
144
148
149
150
150
150
151
151
152
xx
6.9
6.10
6.11
6.12
6.13
6.14
6.15
6.16
A.1
A.2
A.3
B.1
B.2
B.3
B.4
B.5
B.6
B.7
B.8
B.9
B.10
Salida de voltaje y corriente del Filtro de Secuencias.
Distancia a la falla calculada en ATP/EMTP. D
falla
=196.81km.
Salida de la funcin de correlacin estndar.
Salida de la funcin de distancia Euclidiana.
Salida de la funcin Compuesta (Correlacin + Distancia
Euclidiana).
Distancia a la falla calculada en ATP/EMTP. D
falla
=195.58km
Seales S
1
y S
2
con y sin compensacin serie.
Funcin compuesta (correlacin + distancia Euclidiana).
Configuracin de la Lnea de transmisin.
Introduccin de los parmetros de la lnea en el GUI
Power_lineparam
Parmetros elctricos de la lnea de transmisin.
Subrutina LCC Lneas Constants
Pestaa Model
Pestaa Data
Parmetros de la Lnea de Transmisin (Model)
Parmetros de la Lnea de Transmisin (Data)
Falla simulada en ATP/EMTP.
Propiedades del Interruptor (switch) en ATP/EMTP.
Voltajes en fases A, B y C medidos en el punto de falla.
Diferentes tipos de fallas simuladas en ATP/EMTP.
Models en ATP/EMTP
153
153
154
154
154
155
156
156
162
164
164
167
168
169
170
171
171
172
172
172
173
xxi
NDICE DE TABLAS
TABLA DESCRIPCIN PAGINA
2.1
2.2
2.3
3.1
4.1
4.2
4.3
4.4
4.5
4.6
5.1
5.2
5.3
5.4
5.5
5.6
5.7
5.8
5.9
A.1
Conductores de aluminio ACSR.
Caractersticas de los Hilos de Guarda.
Terminaciones de circuitos simples que describen el valor de una
onda reflejada.
Resultados de los modos de tierra y areos ante diferentes fallas.
Comportamiento de las seales d
f
(0)
y d
r
(0)
.
Comportamiento de los modos areas y de tierra antes distintos
tipos de falla.
Caractersticas de las fallas en ndices modales.
Lgica de operacin del algoritmo clasificador de fallas.
Clasificacin de los resultados en ATP/EMTP
Resultados del algoritmo de clasificacin de fallas.
Resultados obtenidos usando la Transformacin de Karrenbauer
modo 1.
Resultados obtenidos usando la Transformacin de Karrenbauer
modo 2.
Resultados obtenidos usando la Transformacin de Karrenbauer
Modo 1 y Modo 2.
Distancias a la falla calculadas por el relevador 1.
Distancias a la falla calculadas por el relevador 2.
Resultados del algoritmo de correlacin.
Resultados de algoritmo de Distancia de Manhattan.
Resultados de algoritmo de Distancia Euclidiana.
Resultados de algoritmo de Funcin Compuesta.
Circuito en arreglo Horizontal, LT A3230 ATN-MNZ, 180 km
19
20
55
90
96
97
98
100
102
103
114
114
115
120
120
120
132
142
143
163
xxii
A.2
A.3
Caractersticas de conductores ACSR utilizados en las lneas de
transmisin.
Caractersticas de cables de guarda de acero galvanizado
163
163
P.G.I .I .E
- 1 -
CAPTULO 1
INTRODUCCIN.
1.1 PROTECCIN DE SISTEMAS DE POTENCIA.
La continuidad y la calidad del servicio son dos requisitos ntimamente ligados al
funcionamiento satisfactorio de los Sistemas Elctricos de Potencia (SEP) [1].
La continuidad en un SEP indica que la energa producida en los centros de generacin sea
suministrada de forma ininterrumpida a los centros de consumo. El requisito de calidad de la
energa se refiere a que la energa debe ser suministrada con ciertas caractersticas: magnitud,
frecuencia, contenido armnico, etc. entre rangos preestablecidos con el fin de garantizar que
los diferentes equipos conectados a la red operen adecuadamente para las condiciones que han
sido diseados.
Cuando se produce una falla, las magnitudes de las variables involucradas alcanzan valores
fuera de sus rangos normales de operacin y ciertas reas del sistema pueden pasar a operar
bajo condiciones desbalanceadas, con el riesgo de dao irreversible que ello conlleva para los
diferentes elementos que lo integran. En caso de no tomar ninguna medida, la falla se
propagara a travs de la red y sus efectos dainos se extenderan. Como consecuencia de todo
ello, importantes zonas de la red podran llegar a quedar fuera de servicio, incluso zonas
alejadas del punto en que se ha producido la falla. Por otra parte, tanto por razones tcnicas
Captulo 1. I ntroduccin
P.G.I .I .E
- 2 -
como econmicas e incluso propias de la red elctrica, es imposible evitar que se produzcan
fallas. El diseo de un sistema elctrico debe considerar la aleatoriedad propia de la ocurrencia
de fallas, por lo que es necesario integrarle equipos y dispositivos adecuados para su
tratamiento. Por esta razn, los SEP cuentan con un sistema de proteccin que tiene por
objetivo minimizar los efectos derivados de los diferentes tipos de falla que puedan originarse.
Los sistemas de proteccin se basan en relevadores de proteccin, los cuales monitorean el
sistema continuamente midiendo las corrientes y voltajes a travs de transformadores de
potencial y de corriente. Los relevadores operan cuando los parmetros medidos se desvan de
niveles pre-establecidos. Cada relevador responde a cambios en parmetros previamente
especificados para su funcionamiento. Algunos de los cambios a los que los relevadores
responden son:
Aumento de corriente en una o ms fases.
Direccin del flujo de corriente.
Cada de voltaje.
Reduccin en la impedancia.
Baja frecuencia de operacin.
Magnitud y direccin del flujo de potencia
Aumento de temperatura en equipos elctricos, etc.
La actuacin del sistema de proteccin va encaminada, por tanto, a mantener la calidad y
continuidad del servicio. Para ello, es necesario que la red sea planificada de manera que
permita ofrecer alternativas de operacin que posibiliten la adecuada alimentacin de todos los
puntos de consumo, aunque se produzcan fallas en elementos de generacin, transporte o
distribucin.
Los relevadores son instalados en varias configuraciones de manera que todos los
componentes del sistema de potencia queden de alguna manera protegidos. En el caso de la
proteccin de distancia esto se logra dividiendo el sistema elctrico en segmentos
Captulo 1. I ntroduccin
P.G.I .I .E
- 3 -
denominados zonas de proteccin. Las zonas de proteccin se pueden traslapar, de modo tal
que ninguna zona quede desprotegida. La regin de traslape debe ser pequea de manera que
la posibilidad de ocurrencia de una falla en la zona de traslape sea mnima, ya que una falla en
esta zona ocasiona la desconexin de un segmento mayor. La Figura 1.1 muestra un ejemplo
de zonas de proteccin para un sistema sencillo.
Aunque una falla puede aparecer en cualquiera de los elementos que compone el SEP,
diferentes estudios ponen en manifiesto que alrededor del 90% de las fallas se producen en las
lneas areas de transmisin, siendo las fallas del tipo de fase a tierra las ms comunes. Este
dato es fcilmente explicable por el hecho que estas lneas abarcan grandes extensiones de
terreno, se encuentran a la intemperie y estn sometidas a acciones exteriores que escapan de
cualquier tipo de control, mientras que otro tipo de elementos como generadores,
transformadores, etc., operan bajo condiciones ms controlables.
Figura 1.1. Zonas de proteccin.
Independientemente del punto en que se produzca la falla, la primera reaccin del circuito de
proteccin es la de desconectar el circuito bajo falla, para impedir que sta se propague y
disminuir el tiempo de permanencia bajo situaciones extremas de los equipos ms
directamente afectados. La desconexin del circuito bajo falla mediante interruptores
Captulo 1. I ntroduccin
P.G.I .I .E
- 4 -
automticos origina un transitorio que, asimismo, puede implicar una serie de alteraciones
como sobretensiones, cambio en la relacin generacin-consumo, posibles cambios de la
frecuencia, etc. Cuando estas consecuencias dan origen a condiciones inadmisibles para
determinados elementos, el sistema de proteccin debe actuar en segunda instancia
desconectando los circuitos que, aunque no estaban directamente afectados por la falla, se ven
alcanzados por sus efectos. Una segunda funcin de la proteccin es dar informacin sobre el
tipo y localizacin de la falla o rgimen anormal que ha ocurrido, con el objetivo de facilitar al
personal de servicio su rpida localizacin y eliminacin.
Los puntos anteriores generan dos aspectos importantes a considerar:
a) Las nuevas exigencias sobre las caractersticas funcionales de un sistema de
proteccin: sensibilidad, selectividad, rapidez fiabilidad, economa y simplicidad.
b) Mayor precisin en la localizacin de las fallas permanentes a fin de reducir los
tiempos de reparacin y nueva puesta en servicio.
1.1.1 Caractersticas Funcionales de un Sistema de Proteccin.
Sensibilidad; la proteccin debe saber distinguir inequvocamente las situaciones de
falla de aquellas que no lo son.
Selectividad; es la capacidad que debe tener la proteccin para, una vez detectada la
existencia de falla, discernir si la misma se ha producido dentro o fuera de su rea de
vigilancia y, en consecuencia, dar la seal de disparo a los interruptores automticos
que controla, cuando as sea necesario para liberar la falla.
Rapidez; tras haber sido detectada, una falla debe ser despejada lo ms rpidamente
posible. Cuanto menos tiempo se tarde en aislar la falla, menos se extendern sus
Captulo 1. I ntroduccin
P.G.I .I .E
- 5 -
efectos y menores daos y alteraciones se producirn al reducirse el tiempo de
permanencia bajo condiciones anormales en los diferentes elementos.
Una liberacin ptima de la falla no exige que todas las protecciones que la detectan
acten de forma inmediata. En funcin de esta caracterstica las protecciones se
clasifican en:
1. Protecciones instantneas; son aquellas que actan tan rpido como es posible
debido a que la falla se ha producido dentro del rea que vigilan directamente.
2. Protecciones de tiempo diferido; son aquellas en la que de manera intencionada
se introduce un tiempo de espera que retrasa su operacin, es decir, que retrasa el
inicio de la maniobra de apertura de interruptores una vez que ha sido tomada la
decisin de operar. Este retraso facilita, por ejemplo, la coordinacin entre
protecciones con el propsito de que acten solamente aquellas que permiten aislar
la falla desconectando la mnima parte posible del SEP.
Fiabilidad; una proteccin fiable es aquella que responde siempre correctamente. Esto
significa que la proteccin debe responder con seguridad y efectividad ante cualquier
situacin que se produzca.
Economa y simplicidad; la instalacin de una proteccin debe estar justificada tanto
por motivos tcnicos como econmicos. La proteccin de una lnea es importante, pero
mucho ms es impedir que los efectos de la falla alcancen a las instalaciones
alimentadas por la lnea o que estas queden fuera de servicio. Por tanto, la valoracin
econmica no debe restringirse solamente al elemento directamente protegido, sino
que debe tener en cuenta las consecuencias que implicaran el fallo o funcionamiento
anormal del elemento mencionado.
Captulo 1. I ntroduccin
P.G.I .I .E
- 6 -
1.1.2 Localizacin de Fallas en Lneas de Transmisin.
El desarrollo de los algoritmos de localizacin en lneas de transmisin requiere de un
conocimiento pleno de las caractersticas de la falla. Esto conlleva a la necesidad de un
conjunto de tareas:
i) Deteccin del evento. Debe existir alguna condicin o seal que genere el inicio del
algoritmo.
ii) Clasificacin de la falla. Esta es una etapa es vital en sistemas de transmisin,
especialmente si hay posibilidades de reconexiones monofsicas.
iii) Discriminacin direccional. La direccin de la falla debe ser determinada para evitar
errores en las rdenes de disparo, de acuerdo al esquema de proteccin, y es igual de
importante para la localizacin.
iv) Localizacin. Este punto es comn tanto para equipos que necesitan localizar la falla
como parte del esquema de proteccin (localizacin en lnea: ONLINE) o para esquemas
independientes de localizacin para labores de reparacin y mantenimiento (localizacin
fuera de lnea: OFFLINE).
Como se observa, las tres tareas iniciales son idnticas tanto para algoritmos en lnea,
como para los fuera de lnea. Por tanto, es claro que el desarrollo de tcnicas de anlisis y
de plataformas de hardware en el mbito de las protecciones tiene una repercusin directa
en cualquier avance en cuanto a filosofa, esquema o algoritmo en la localizacin de fallas
[2]. En la Figura 1.2 se indica en forma esquemtica el avance en cuanto a plataformas y
algoritmos en las protecciones elctricas [3]. De ah se puede concluir que las ltimas
tendencias estn marcadas, en cuanto a hardware, por el desarrollo de plataformas basadas
en Procesadores Digital de Seales y en cuanto a las tcnicas, aquellas basadas en
fenmenos transitorios.
Captulo 1. I ntroduccin
P.G.I .I .E
- 7 -
Figura 1.2 Avance del principio de funcionamiento y tecnologas de relevadores de proteccin.
1.2 TCNICAS DE DETECCION Y LOCALIZACIN DE FALLAS EN LNEAS DE
TRANSMISIN.
Con el avance de la tecnologa, se han seguido desarrollando distintas tcnicas de localizacin
de fallas que en general, podran ser agrupadas, segn la indicacin de Kawady en [4], en dos
grupos como se indica en la Figura 1.3.
Figura 1.3 Clasificacin de las tcnicas de localizacin [4].
Captulo 1. I ntroduccin
P.G.I .I .E
- 8 -
Adicional a esta clasificacin y en base a [5, 6 y 7], se debe incorporar un caso donde se
utiliza la informacin combinada tanto de alta como de baja frecuencia, con o sin la necesidad
adicional de la estimacin de fasores, por lo que se podra modificar la Figura 1.3,
obtenindose la Figura 1.4:
Figura 1.4. Clasificacin de las tcnicas de localizacin [5, 6 y 7].
Cabe indicar que el uso de datos de ms de un terminal tiene inconvenientes como la
necesidad de sistemas de telecomunicacin y sincronizacin para su correcta comparacin,
esto trae un costo adicional.
El problema con las tcnicas bsicas indicadas en la Figura 1.3 pueden resumirse de la
siguiente forma:
Mtodo de la estimacin de la impedancia:
- Asume variacin lineal de la impedancia con la distancia.
- La impedancia de falla, afecta notoriamente la estimacin.
- La condicin de carga.
Captulo 1. I ntroduccin
P.G.I .I .E
- 9 -
- El nivel de cortocircuito de la (s) fuente (s).
- La topologa de la red.
Mtodo de la onda viajera:
- Depende fuertemente del ngulo de insercin del voltaje, pues si este es
cercano a cero, no se origina una onda viajera.
- Cuando la falla es muy cercana a la barra, es prcticamente imposible estimar
la distancia.
Todos estos inconvenientes hacen que cada una de las tcnicas por separado no funcionen
correctamente en el 100% de los casos que pueden presentarse durante condiciones reales de
operacin. Por ello, la mezcla o combinacin de la informacin proveniente de la medicin de
las corrientes y voltajes puede ser de mayor utilidad en conjunto con tcnicas de anlisis ms
complejas, entre las que se pueden destacar las redes neuronales y la transformada wavelets,
que han generado la mayor cantidad de publicaciones en los ltimos aos. Existen otras
tcnicas intermedias como las indicadas en [8, 9] que utilizan para la localizacin de la falla la
estimacin fasorial por medio de PMU (Phasor Measurement Units) y que intercambian
informacin por medio de sincronizacin va GPS. Estas tcnicas arrojan estimaciones
bastante precisas, pero requieren un alto costo de inversin que se justificara solo en casos
puntuales.
En general las diversas tcnicas pueden clasificarse en tres grupos principales:
a) Anlisis en Baja Frecuencia:
Esquemas convencionales de estimacin fasorial de la impedancia y en funcin de ella,
calcular la distancia de la falla (planos R-X). Estos esquemas son acelerados con
algoritmos basados en ventanas adaptivas [10, 11, 12 y 13].
Uso de filtros de Kalman para la estimacin fasorial [14, 15].
Red Neuronal para el ajuste de curvas (estimacin paramtrica) [16, 17, 18, 19]
Captulo 1. I ntroduccin
P.G.I .I .E
- 10 -
Red neuronal de base radial o tipo Retropropagacin sin estimacin paramtrica [6].
Resoluciones matemticas complejas basadas en operadores dinmicos, para
minimizar los tiempos de clculo [20]
Uso de filtros de Walsh para la obtencin de las componentes fundamentales [21].
Uso de unidades de medicin fasorial en tiempo real (PMU) [22, 23]
Utilizacin de la transformada de Wavelets [24, 25, 26]
b) Anlisis en Alta Frecuencia
La mayora de los artculos revisados, utilizan el principio clsico de las ondas viajeras
descrito en [27], pero variando la tcnica para extraer la informacin relevante de las seales,
es decir, simplemente cambiando las herramientas.
Uso de filtros digitales multietapas [3, 28]
Uso de filtros anlogicos y sincronizacin utilizando GPS [29]
Uso de redes neuronales auto-organizativas [30]
Transformada Wavelets [31]
Uso de la Morfologa Matemtica (Procesamiento de seales) [32]
Redes Neuronales basadas en tcnicas estadsticas [33]
Uso de redes neuronales del tipo feedforward o de Base Radial [34]
c) Informacin Combinada:
Estimacin de la distribucin de voltaje en la lnea por medio de las ecuaciones de
onda en el dominio modal. [35, 36]
Solucin individual de tcnica de alta y baja frecuencia y organizacin de la
informacin arrojada por ambas, utilizando la transformada de Fourier [37, 38].
Utilizando Wavelets en su anlisis Multiresolucin [39]
Utilizando lgica difusa en conjunto con la transformada wavelets [40]
Utilizando redes neuronales en conjunto con la transformada wavelet [41]
Captulo 1. I ntroduccin
P.G.I .I .E
- 11 -
Adicionalmente, existen otros escenarios en los que las lneas de transmisin necesitan
anlisis especiales para su proteccin y localizacin de fallas entre ellos:
Lneas multiterminales. Estas configuraciones tienen problemas severos para su
proteccin y para la localizacin de fallas, debido a la presencia de otras
ramificaciones que podran inclusive realimentar la falla.
Lneas en paralelo. Tienen complicaciones por los acoplamientos mutuos.
Presencia de elementos de compensacin con control o sin control por medio de
electrnica de potencia (TSC, FACTS, Compensacin en serie).
Por otro lado, cada planteamiento tiene dificultades adicionales que deben tomarse en cuenta a
la hora de su desarrollo [2].
Seales a utilizar (corriente, voltaje o ambas).
Dominio de la fase, modal o ambos.
Tipo de matriz de transformacin modal a utilizar (Clark, Wedephol, Karrembauer, la
compleja de Fortescue, la exacta que diagonalice la lnea a proteger, etc).
Frecuencia de muestreo de la seal.
Trabajar con las componentes de alta, baja frecuencia o ambas.
Esquema de la ventana de muestreo a utilizar (adaptiva o fija).
Tcnicas matemticas a utilizar (DFT, TW, Ecuaciones diferenciales, etc)
Consideraciones reales de la comunicacin (Intranet, PMU, GPS, etc.).
1.3 REVISIN BIBLIOGRFICA
El estudio de esquemas de proteccin de Ondas Viajeras para lneas de transmisin inicio en
1950; sin embargo, su implementacin prctica estaba limitada por la lentitud de los
procesadores y el pequeo ancho de banda de los transductores de corriente y de potencial
existentes en esa poca.
Captulo 1. I ntroduccin
P.G.I .I .E
- 12 -
Entre las primeras propuestas se encuentra la de Takagi [42], quien en 1977, propuso un
algoritmo diferencial que detectaba fallas dentro de la lnea protegida en base a la medicin de
las ondas viajeras en ambos extremos de la lnea. Sin embargo, una de las desventajas
principales de este algoritmo es el requerir de un canal de comunicacin con un gran ancho de
banda que permita transmitir todos los voltajes y corrientes incrementales entre los terminales
de la lnea protegida.
En 1978, Dommel y Michels [43], obtienen un criterio de discriminacin entre fallas internas
y externas determinando la secuencia en la cual las seales de relevador S
1
y S
2
exceden un
determinado nivel.
En 1983, Crossley y Mclaren [44], presentaron una tcnica para medir de manera ultra rpida
la distancia a la falla, utilizando una tcnica de correlacin para detectar el segundo frente de
onda y distinguirlo de otras seales presentes en el sistema. No obstante, ante ciertos tipos de
fallas, la tcnica de correlacin puede dar resultados errneos.
Posteriormente, en 1988, Shehab y Mclaren [45] sugirieron una tcnica de doble correlacin,
con el propsito de distinguir entre reflexiones de la falla y reflexiones de puntos ms all de
la falla; adems, mejoraron la capacidad del algoritmo para detectar fallas cercanas al
relevador y fallas de alta impedancia.
En 1988, Michels [46], obtiene dos nuevas funciones de discriminacin que son
independientes del ngulo de insercin de la falla.
En 1998, Jie Liang y Elangovan [47], plantearon el uso de tcnicas de reconocimiento de
patrones para la proteccin de lneas de transmisin, su propuesta se basaba en tcnicas como
la del vecino ms cercano y la distancia de Manhattan. Adems propusieron una funcin
basada en la combinacin de la funcin de correlacin y la distancia de Manhattan con la
finalidad de mejorar el desempeo del algoritmo.
Captulo 1. I ntroduccin
P.G.I .I .E
- 13 -
En 2003, E. Martinez [33], propone un nuevo mtodo de discriminacin basado en el anlisis
de la componente principal del primer frente de onda viajera que llega al relevador.
Posteriormente en 2004, H. S. Sidhu [48], propone una tcnica digital que sirve tanto para
discriminacin como localizacin de la falla utilizando filtros de secuencia.
En 2006, Pathirana, V. y McLaren, P [49], plantean la solucin al problema de las fallas que
ocurren muy prximas al relevador o cercanas al cruce por cero de la seal de voltaje, a travs
de un algoritmo hibrido que utiliza un algoritmo de Ondas viajeras y un algoritmo de
Impedancia que funcionan en paralelo.
1.4 OBJETIVOS.
Los principales objetivos de este trabajo de tesis son:
1. Analizar los diferentes esquemas de proteccin de Lneas de Transmisin basados en
Ondas Viajeras, as como los diferentes algoritmos de localizacin de fallas propuestos
hasta la fecha.
2. Identificar los problemas asociados con estos algoritmos de proteccin tales como:
fallas cercanas al relevador, fallas cercanas al bus remoto, fallas que ocurren cerca del
cruce por cero de la onda de voltaje y fallas de alta impedancia.
3. Modelar y simular los esquemas de proteccin de Ondas Viajeras para verificar su
operacin y evaluar su respuesta. Se utiliza ATP-EMTP como herramienta de
simulacin debido a su capacidad para simular fallas en lneas de transmisin, la
incorporacin sencilla de modelos complejos de ciertos componentes y por su
lenguaje de programacin MODELS, que permite desarrollar los algoritmos de
proteccin y evaluarlos mediante simulacin.
Captulo 1. I ntroduccin
P.G.I .I .E
- 14 -
4. Analizar caractersticas de dichos esquemas de proteccin tales como: confiabilidad,
selectividad, sensibilidad y tiempo de operacin.
5. Evaluar la respuesta de los esquemas de proteccin basados en Ondas viajeras ante
lneas de transmisin compensadas.
1.5 JUSTIFICACIN
Este trabajo de tesis se orienta a la proteccin de sistemas de transmisin en alta tensin y se
justifica por la necesidad de reducir al mnimo el tiempo de indisponibilidad de las lneas de
transmisin debido a fallas. El crecimiento constante de la demanda en conjunto con las
nuevas estrategias de mercado para el suministro elctrico en todas sus etapas han llevado al
sistema de transmisin a crecer tanto en tamao como en complejidad, requirindose con
frecuencia trabajar cada vez ms cerca de los lmites crticos de estabilidad.
En esta perspectiva, la estabilidad de un sistema elctrico de potencia puede ser mejorada si se
libera la falla de forma muy rpida. Actualmente, los esquemas de proteccin ms utilizados
en lneas de transmisin se basan en relevadores de distancia, los cuales tienen el
inconveniente de que se tiempo de operacin es de un ciclo, para la proteccin del 80% de la
lnea.
Los algoritmos de proteccin de lneas de transmisin basados en seales transitorias de alta
frecuencia generadas durante la falla son conocidos como Algoritmos de proteccin de Ondas
Viajeras, y estos han mostrado buenos resultados sobre todo en lo que a tiempos de operacin
se refiere [42-49].
Existen en la literatura diferentes algoritmos que utilizan Ondas Viajeras para detectar y
localizar fallas de forma ultra rpida [42-49]. Sin embargo, como se mencion anteriormente,
los esquemas de proteccin basados en ondas viajeras pueden fallar al detectar fallas bajo
Captulo 1. I ntroduccin
P.G.I .I .E
- 15 -
ciertas condiciones [50]. Es por ello que se requiere que sean ms extensamente estudiados,
ya que pueden ser una alternativa ante los problemas de tiempo de operacin que presentan los
esquemas de proteccin basados en medicin de impedancia.
1.6 ESTRUCTURA DE LA TESIS
Esta tesis est organizada en siete captulos y dos apndices.
Captulo 1. I ntroduccin: contiene una introduccin general de la proteccin de
sistemas de potencia, los antecedentes de la proteccin de lneas de transmisin
mediante Ondas Viajeras y se sealan las ventajas de usar este tipo de esquemas.
Tambin se presenta un breve resumen de las propuestas ms relevantes acerca del
tema y por ltimo se describe la estructura general del trabajo de tesis.
Captulo 2. Lneas de Transmisin: se presentan los aspectos tericos de las lneas de
transmisin como son: las ecuaciones de la lnea de transmisin y los parmetros
elctricos de la lnea. Adems, se desarrollan las bases matemticas que describen la
propagacin de Ondas Viajeras en lneas de transmisin, as como los diferentes
coeficientes de reflexin y refraccin de Ondas viajeras ante distintos tipos de
terminacin de la lnea de transmisin.
Captulo 3. Deteccin y Discriminacin direccional de la falla: se describe el
principio de operacin de los esquemas de proteccin basados en Ondas Viajeras. Se
presentan los mtodos de deteccin y discriminacin direccional de la falla y se crean
modelos en ATP-EMTP, tambin se hace una evaluacin de sensibilidad y selectividad
de los mismos ante diferentes escenarios. Por ltimo, se evala la capacidad de los
modos de tierra y areos de las diferentes matrices de transformacin para detectar o
no cierto tipo de fallas.
Captulo 1. I ntroduccin
P.G.I .I .E
- 16 -
Captulo 4. Clasificacin de la falla: se propone un algoritmo que utiliza la capacidad
de los modos de tierra y areos de las diferentes matrices de transformacin para
detectar o no cierto tipo de fallas y la informacin de un anlisis de componentes
simtricas de la matriz de Karrenbauer para determinar las fases involucradas en la
falla.
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera: Se presenta
un estudio de confiabilidad y rapidez de los diferentes algoritmos de localizacin de
fallas en lneas de transmisin basados en Ondas Viajeras. Se estudian los problemas
asociados con dichos algoritmos de proteccin, tales como: fallas que ocurren cerca del
cruce por cero de la onda de voltaje, fallas de alta impedancia, fallas cercanas al
relevador y fallas cercanas al bus remoto.
Captulo 6. Efectos de la compensacin serie fija en algoritmos de Ondas Viajeras:
en este captulo se estudia el desempeo de los algoritmos de proteccin de Ondas
Viajeras ante lneas de transmisin con compensacin serie fija.
Captulo 7. Conclusiones, aportaciones y recomendaciones: se presentan las
conclusiones y aportaciones de este trabajo de investigacin, y se dan algunas
sugerencias sobre algunos temas que necesitan ser investigados ms a fondo para
mejorar la confiabilidad del relevador.
P.G.I .I .E
- 17 -
CAPTULO 2
L NEAS DE TRANSMI SI N.
2.1 INTRODUCCIN A LOS SISTEMAS ELCTRICOS DE POTENCIA
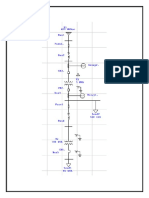
Un Sistema Elctrico de Potencia (Figura 2.1) consta generalmente de los siguientes
elementos [51]:
Figura 2.1. Sistema elctrico de potencia
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 18 -
1. Centrales generadoras.
2. Estaciones transformadoras elevadoras y reductoras
3. Lneas de transmisin.
4. Estaciones de maniobra o enlace.
5. Lneas o redes primarias de distribucin.
6. Bancos transformadores de servicio.
7. Lneas o redes secundarias.
La red de transmisin es la encargada de conectar los grandes centros de produccin,
geogrficamente muy dispersos, con los grandes ncleos de consumo, normalmente ubicados
cerca de ciudades y zonas industriales. Esta red debe transportar grandes cantidades de energa
a largas distancias y por ello debe funcionar a muy alta tensin. En Mxico, la red de
transmisin de 220 y 400kV.
2.1.1 Estructuras de las Lneas de Transmisin
Figura 2.2.Un circuito horizontal Figura 2.3. Tipo delta Figura 2.4. Doble circuito vertical
La red de transporte es un elemento clave en el equilibrio dinmico entre la produccin y el
consumo, y por ello adopta una configuracin mallada, permitiendo que todas las centrales
puedan servirse de respaldo entre ellas para cubrir eventuales fallas. Adems, se cuenta con
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 19 -
equipos de medicin, proteccin y control para que las fallas (cortocircuitos, descargas
atmosfricas, maniobras, fallas de equipos) no comprometan el correcto funcionamiento de
todo el sistema.
Figura 2.5. Torre de transmisin con circuito Horizontal.
2.1.2 Tipos de Conductores
Los conductores ms usuales para el transporte de energa son cables de cobre o
cables de aluminio (Tabla 2.1) con alma de acero (ACSR) y ltimamente los cables de
aluminio tipo alumoweld.
Tabla 2.1 Conductores de aluminio ACSR
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 20 -
Dependiendo de la energa a transportar, una lnea puede llevar uno o ms conductores
por fase, teniendo para esto que construirse estructuras ms robustas para poder
soportar la carga.
Los smbolos que identifican los diferentes tipos conductores de aluminio son:
AAC Todos los conductores de aluminio
AAAC Todos conductores de aleacin de aluminio
ACSR Conductores de aluminio con alma de acero
ACAR Conductores de aluminio con alma de aleacin
2.1.3 Hilos de Guarda
Para proteger una lnea contra descargas atmosfricas es necesario instalar cables de
guarda que protejan los conductores, por lo que estos cables se instalan siempre en la
parte superior de las estructuras. La Tabla 2.2 muestra los parmetros fsicos de los cables
comnmente utilizados para este propsito: el de acero galvanizado y el alumoweld.
Tabla 2.2 Caractersticas de los Hilos de Guarda.
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 21 -
2.1.4 Transposiciones
Una transposicin es una rotacin fsica de los conductores que se realiza a intervalos
regulares en la lnea de transmisin y tiene como objetivo fundamental mantener un sistema
balanceado, como se muestra a continuacin:
2.2 TEORA DE LNEAS DE TRANSMISIN.
2.2.1 Ecuaciones de la Lnea de Transmisin.
En la Figura 2.6 se muestra una lnea de transmisin trifsica compuesta de tres conductores
en paralelo con el plano de tierra. Los voltajes y corrientes son funciones de la magnitud de x
a lo largo de la lnea y del tiempo t [52].
Figura 2.6 Representacin de una lnea de transmisin trifsica con retorno por tierra.
S
A
L
I
D
A
1/6 de Lnea 1/3 de Lnea 1/3 de Lnea 1/6 de Lnea
L
L
E
G
A
D
A
A
A
A
A
B
B
B
B
C
C
C
C
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 22 -
Figura 2.7. Circuito equivalente por unidad de longitud para una lnea de transmisin trifsica.
El circuito equivalente aproximado de una lnea de transmisin de longitud diferencial se
muestra en la Figura 2.7. Se considera un modelo de lnea de parmetros uniformemente
distribuidos, en este modelo se incluyen variaciones dependientes de la frecuencia en los
parmetros de lnea y los efectos del retorno por tierra. Los conductores son descritos por sus
parmetros de secuencia positiva, mientras que los efectos del retorno por tierra son tomados
de los parmetros de secuencia cero.
Aplicando la ley de voltajes de Kirchhoff al lazo formado por cada conductor y tierra,
(
(
(
(
(
(
=
(
(
(
c
c
) , (
) , (
) , (
3
1
) , (
) , (
) , (
t x I
t x I
t x I
Z Z Z
Z Z Z
Z Z Z
t x V
t x V
t x V
x
c
b
a
s m m
m s m
m m s
c
b
a
(2.1)
donde
|
.
|
\
|
c
c
+ + |
.
|
\
|
c
c
+ =
t
L R
t
L R Z
s 1 1 0 0
2 (2.2)
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 23 -
|
.
|
\
|
c
c
+ |
.
|
\
|
c
c
+ =
t
L R
t
L R Z
m 1 1 0 0
(2.3)
De igual forma, aplicando las ley de corrientes de Kirchhoff a la unin de cada conductor con
el capacitor a tierra,
(
(
(
c
c
(
(
(
=
(
(
(
c
c
) , (
) , (
) , (
3
1
) , (
) , (
) , (
t x I
t x I
t x I
X
Y Y Y
Y Y Y
Y Y Y
t x V
t x V
t x V
t
c
b
a
s m m
m s m
m m s
c
b
a
(2.4)
donde
|
|
.
|
\
|
+ =
1 0
2 1
C C
Y
s
(2.5)
|
|
.
|
\
|
=
1 0
1 1
C C
Y
m
(2.6)
Aplicando la Transformada de Laplace a (2.1) y (2.4) se tiene:
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( ) (
(
(
(
(
(
+
+
+
=
(
(
(
) , (
) , (
) , (
2
2
2
3
1
) , (
) , (
) , (
1 0 1 0 1 0
1 0 1 0 1 0
1 0 1 0 1 0
s x I
s x I
s x I
Z Z Z Z Z Z
Z Z Z Z Z Z
Z Z Z Z Z Z
s x V
s x V
s x V
dx
d
c
b
a
c
b
a
(2.7)
y
(
(
(
(
(
(
(
(
(
(
(
|
|
.
|
\
|
+
|
|
.
|
\
|
|
|
.
|
\
|
|
|
.
|
\
|
|
|
.
|
\
|
+
|
|
.
|
\
|
|
|
.
|
\
|
|
|
.
|
\
|
|
|
.
|
\
|
+
=
(
(
(
) , (
) , (
) , (
2 1 1 1 1 1
1 1 2 1 1 1
1 1 1 1 2 1
3
1
) , (
) , (
) , (
1 0 1 0 1 0
1 0 1 0 1 0
1 0 1 0 1 0
s x I
s x I
s x I
dx
d
Y Y Y Y Y Y
Y Y Y Y Y Y
Y Y Y Y Y Y
s x V
s x V
s x V
c
b
a
c
b
a
(2.8)
Donde Z
0
= R
0
+ s L
0
, Z
1
= R
1
+ sL
1
, Y
0
= sC
0
y Y
1
= sC
1
.
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 24 -
Las relaciones (2.7) y (2.8) pueden expresarse en forma general como:
| | | || | I Z V
dx
d
p
3
1
=
(2.9)
| | | | | | I
dx
d
Z V
q
3
1
=
Eliminando la matriz de corrientes I de (2.9), se puede obtener la ecuacin diferencial de
segundo orden que involucra la matriz de voltajes:
| | | || | 0 V u V
dx
d
2
2
= (2.10)
Donde:
| |
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( ) (
(
(
(
(
(
+
+
+
=
) , (
) , (
) , (
2
2
2
3
1
1 1 0 0 1 1 0 0 1 1 0 0
1 1 0 0 1 1 0 0 1 1 0 0
1 1 0 0 1 1 0 0 1 1 0 0
s x I
s x I
s x I
Y Z Y Z Y Z Y Z Y Z Y Z
Y Z Y Z Y Z Y Z Y Z Y Z
Y Z Y Z Y Z Y Z Y Z Y Z
u
c
b
a
(2.11)
La ecuacin (2.10) no tiene una solucin simple porque el coeficiente de la matriz u no es
diagonal. Usando una transformacin de variables, el voltaje actual V puede ser transformado
en otro juego de componentes U.
| | | || | U T V =
(2.12)
| | | | | | V T U
1
=
Donde T es la matriz de transformacin. Ahora (2.10) puede ser escrita como
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 25 -
| | | || | 0
2
2
= U U
dx
d
t (2.13)
donde
| | | | | || | 0
1
= =
T u T t (2.14)
Con una adecuada seleccin de la matriz T, es posible hacer la matriz diagonal. Ahora (2.13)
puede ser resuelta si es un conjunto de ecuaciones diferenciales ordinarias con coeficientes
constantes.
Con la transformacin apropiada, las componentes de la lnea de transmisin (2.11) se
convierten en:
| | | | | || |
(
(
(
= =
1 1
1 1
0 0
1
0 0
0 0
0 0
Y Z
Y Z
Y Z
T u T t (2.15)
El sistema trifsico se representa con tres sistemas o modos independientes. Este mtodo es
conocido como transformacin modal.
2.2.2 Transformacin Modal.
Una lnea que consiste en n conductores y tierra tiene n modos de propagacin. Cada modo
tiene una relacin Voltaje-Corriente, con velocidad y atenuacin constante para cada
frecuencia considerada. Para analizar el comportamiento transitorio de un sistema trifsico, el
voltaje y la corriente son convertidos en cantidades modales. Las tcnicas de transformacin
modal convierten un sistema de n lneas interdependientes en n modos independientes.
Una matriz de transformacin como en (2.15) se utiliza para encontrar cantidades modales. La
transformacin de seales de voltaje y de corriente utiliza dos matrices de transformacin. La
ecuacin (2.16) muestra la relacin entre fases y cantidades modales.
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 26 -
| | | || | ) ( ) (
) (
t v S t v
m
=
(2.16)
| | | || | ) ( ) (
) (
t i Q t i
m
=
Donde S y Q son las matrices de transformacin modal de voltaje y corriente respectivamente.
v
(m)
(t) e i
(m)
(t) son las matrices de voltaje y corriente modales. La relacin inversa est dada
por (2.17).
| | | | | | ) ( ) (
1 ) (
t v S t v
m
=
(2.17)
| | | | | | ) ( ) (
1 ) (
t i Q t i
m
=
La relacin entre voltaje y corriente de un sistema de n lneas esta dado por:
| |
(
=
_ _
I Z
dx
V d
(2.18)
| |
(
=
_ _
V Y
dx
I d
(2.19)
donde las matrices tienen la dimensin correspondiente al nmero de nodos. Aplicando las
cantidades modales de voltaje a (2.18) se obtiene:
| || | { } | || |
) (
_
) ( m m
I Q Z V S
dx
d
(
=
| | { } | | | || | | || |
) ( ) ( ) (
_
1 ) ( m m m m
I Z I Q Z S V
dx
d
=
(
=
(2.20)
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 27 -
donde | | | | Q Z S Z
m
(
=
(
_
1
) (
_
. Similarmente de (2.19), es posible mostrar que
| | { } | || |
) ( ) ( ) ( m m m
V Y I
dx
d
= (2.21)
donde | | | | S Y Q Y
m
(
=
(
_
1
) (
_
Existen varios tipos de transformaciones [33]. Las ms comunes son las siguientes:
Transformacin de Karrenbauer:
| | | |
(
(
(
= =
2 1 1
1 2 1
1 1 1
Q S (2.22)
| | | |
(
(
(
= =
1 0 1
0 1 1
1 1 1
3
1
1 1
Q S (2.23)
Transformacin de Clarke:
| | | |
(
(
(
(
(
(
= =
2
3
2
1
1
2
3
2
1
1
1 1 1
Q S (2.24)
| | | |
(
(
(
(
= =
3
1
3
1
0
1 1 2
1 1 1
3
1
1 1
Q S (2.25)
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 28 -
Transformacin de Wedepohl:
| | | |
(
(
(
= =
1 1 1
2 0 1
1 1 1
Q S (2.26)
| | | |
(
(
(
(
(
(
= =
2
1
1
2
1
2
3
0
2
3
1 1 1
3
1
1 1
Q S (2.27)
Por otro lado, las cantidades modales evaluadas proporcionaran tres modos; dos modos areos
y un modo de tierra.
Modo de tierra [Modo 0]
Este es la componente de secuencia cero de los voltajes y corrientes de fase. Su velocidad y
atenuacin sern afectadas por la resistividad de la tierra y es dependiente de la frecuencia. La
velocidad a bajas frecuencias puede ser de aproximadamente el 75% de la velocidad de la luz.
Modos areos [Modo 1 y 2]
En estos modos la corriente en las tres fases tiende a cancelarse. De modo que la influencia de
la resistividad de tierra en estos modos es muy pequea. Por otra parte, los modos areos son
independientes de la frecuencia y la velocidad de propagacin es aproximadamente la
velocidad de la luz.
Para un sistema trifsico:
| | | | I Z V
p
C (
=
) (
_
(2.28)
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 29 -
Donde
) (
_
p
C
Z es la matriz de impedancia caracterstica. Usando transformacin modal se
obtiene:
| | | | | || | | || |
) ( ) ( ) (
) (
_
1 ) ( m m
c
m
p
C
m
I Z I Q Z S V =
(
=
(2.29)
donde
) (
_
m
C
Z es la matriz de impedancia caracterstica modal.
Para una seccin de lnea totalmente transpuesta (configuracin simtrica) [
) (
_
m
C
Z ] es
diagonal:
| |
(
(
(
=
2
1
0
) (
0 0
0 0
0 0
Z
Z
Z
Z
m
c
(2.30)
Donde Z
0
es la impedancia del modo de tierra y Z
1
y Z
2
son las impedancias de los modos
areos. En (2.30):
m s
Z Z Z
0 0 0
2 + =
m s
Z Z Z Z
0 0 2 1
= =
Donde:
Z
0s
= trmino de la impedancia propia de la matriz de impedancia
caracterstica de fase.
Z
0
m = trmino de la impedancia mutua de la matriz de impedancia
caracterstica de fase.
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 30 -
2.3 PROPAGACIN DE ONDAS VIAJERAS EN LNEAS DE TRANSMISIN.
2.3.1 Ecuaciones de Onda Viajera.
Cuando se incrementa la longitud de la lnea de transmisin, el voltaje y la corriente en un
instante dado puede variar considerablemente con la distancia a lo largo de la lnea. Cuando
las lneas son de longitud muy grande, los modelos de parmetros concentrados de lneas de
transmisin cortas no dan resultados validos. En tales circunstancias se utilizan modelos de
lneas de transmisin con parmetros distribuidos [52].
a) Lnea sin prdidas
La propagacin caracterstica de las seales en lneas de transmisin puede ser determinada a
travs de una solucin transitoria de las ecuaciones de onda. Primeramente se analizar una
lnea ideal, la cual no tiene resistencia serie y admitancia en derivacin. Suponga que en algn
instante el voltaje v y la corriente i son distribuidos a lo largo de una lnea de transmisin sin
perdidas, con inductancia L por unidad de longitud y capacitancia C por unidad de longitud,
como se muestra en la Figura 2.8.
Figura 2.8: Modelo de parmetros distribuidos de una lnea de transmisin. (a) seccin de lnea
(b) lnea de transmisin.
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 31 -
Las distribuciones sern para ambas funciones de distancia x y tiempo t. Las distribuciones de
voltaje y la corriente estn dadas por:
( ) t x V v , = ( ) t x I i , = (2.31)
Ahora, considrense dos puntos en la lnea de transmisin con distancias x y x+x. Entonces
el total de la corriente capacitiva sobre la seccin x es
( ) ( )
}
A +
c
c
= A +
x x
x
dx
t
v
C t x x I t x I , ,
Ahora, si se considera que x tienda a cero
t
v
C x dx
t
v
C
x x
x
x
c
c
A =
c
c
}
A +
A 0
lim
( ) ( )
t
v
C
x
t x x I t x I
x
c
c
=
A
A +
A
, ,
lim
0
(2.32)
t
v
C
t
i
c
c
=
c
c
De igual forma, la diferencia de voltaje entre dos puntos a distancias x y x+x est dada por la
cada inductiva sobre la seccin x:
( ) ( )
}
A +
c
c
= A +
x x
x
dx
t
i
L t x x V t x V , , (2.33)
Usando los mismos argumentos empleados para la corriente, es posible demostrar que:
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 32 -
t
i
L
t
v
c
c
=
c
c
(2.34)
derivando (2.32) con respecto al tiempo:
2
2 2
t
v
C
x t
i
c
c
=
c c
c
(2.35)
y derivando (2.34) con respecto a la distancia:
t x
i
L
x
v
c c
c
=
c
c
2
2
2
(2.36)
de (2.35) y (2.36) se obtiene:
t
v
LC
x
v
2
2
2
2
c
c
=
c
c
(2.37)
y con un proceso similar se obtiene:
t
i
LC
x
i
2
2
2
2
c
c
=
c
c
(2.38)
La solucin de las ecuaciones (2.37) y (2.38) se puede encontrar bajo un proceso similar. Para
este tipo de ecuaciones DAlembert propuso un mtodo de solucin. La ecuacin de onda de
(2.37) es de la forma:
2
2
2
2
2
x
v
a
t
v
c
c
=
c
c
(2.39)
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 33 -
Dnde LC a / 1 = . As, (2.39) es transformada primero introduciendo las nuevas variables
independientes:
at x r + = at x s = (2.40)
Entonces, el voltaje v y la corriente i se expresan como funciones de r y s. El lado izquierdo de
(2.34) se puede expander:
s
v
r
v
x
s
s
v
x
r
r
v
x
v
c
c
+
c
c
=
c
c
c
c
+
c
c
c
c
=
c
c
(2.41)
Elevando al cuadrado (2.41) se obtiene:
2
2 2
2
2
2
2
2
s
v
s r
v
r
v
x
v
c
c
+
c c
c
+
c
c
=
c
c
(2.42)
De manera similar:
|
.
|
\
|
c
c
c
c
=
c
c
c
c
+
c
c
c
c
=
c
c
s
v
r
v
a
t
s
s
v
t
r
r
v
t
v
(2.43)
El cuadrado de (2.43) es:
|
|
.
|
\
|
c
c
+
c c
c
c
c
=
c
c
2
2 2
2
2
2
2
2
2
s
v
s r
v
r
v
a
t
v
(2.44)
Substituyendo (2.42) y (2.44) en (2.39):
0
2
=
c c
c
s r
v
(2.45)
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 34 -
Ahora, (2.45) puede ser resuelta integrando sucesivamente dos veces. Integrando con respecto
a r.
( ) s
s
v
e =
c
c
(2.46)
donde (s) es una funcin arbitraria de s, independiente de r.
Integrando con respecto a s:
( ) ( ) ( ) ( ) r f s f r f ds s v
s
2 1 2
+ = + =
}
e (2.47)
donde f
2
(r) es una funcin arbitraria de r. Substituyendo r y s en (2.47):
( ) ( ) ( ) at x B at x A t x v + + = , (2.48)
Donde A y B son funciones arbitrarias. La ecuacin (2.48) es conocida como la solucin de
dAlembert de la ecuacin de onda. Aqu A(x-at) representa una onda viajando en la direccin
positiva de x, y B(x+at) representa una onda viajando en direccin negativa de x. stas ondas
son conocidas como Ondas Viajeras que se mueven a una velocidad a. Las seales de voltaje
y corriente son representadas por:
( ) ( ) ( ) at x f at x f t x v + =
2 1
, (2.49)
( ) ( ) ( ) at x f
Z
at x f
Z
t x i
c c
+ + =
2 1
1 1
, (2.50)
Donde f
1
y f
2
remplazan las funciones arbitrarias A y B en (2.48).
C
L
=
c
Z
es la impedancia
caracterstica de la lnea de transmisin.
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 35 -
b) Lnea con prdidas
El modelo de parmetros distribuidos de una lnea de transmisin con prdidas es representado
por un inductor de inductancia L por unidad de longitud en serie con una resistencia R por
unidad de longitud y un capacitor en derivacin con capacitancia C por unidad de longitud,
as como una conductancia G en paralelo por unidad de longitud.
La distribucin de voltaje v y corriente i ser en trminos de ambas funciones de distancia x y
tiempo t como en el caso de la lnea sin perdidas. El modelo de parmetros distribuidos de una
lnea con prdidas para una distancia incremental x se muestra en la Figura 2.9.
Ahora, el voltaje entre dos puntos sobre la seccin de lnea x est dado por:
Figura 2.9: Modelo de parmetros distribuidos para una lnea con prdidas.
( ) ( )
}
A +
|
.
|
\
|
c
c
+ = A +
x x
x
dx
t
i
L Ri t x x V t x V , , (2.51)
Simplificando como en el caso de la lnea sin perdidas
|
.
|
\
|
c
c
+ =
c
c
t
i
L Ri
x
v
(2.52)
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 36 -
La corriente se divide a travs del capacitor y la conductancia. Entonces la corriente de fuga
sobre la seccin x est dada por:
( ) ( )
}
A +
|
.
|
\
|
c
c
+ = A +
x x
x
dx
t
v
C Gv t x x I t x I , , (2.53)
y esto conduce a:
|
.
|
\
|
c
c
+ =
c
c
t
v
C Gv
x
i
(2.54)
La solucin de (2.52) y (2.54) en el dominio del tiempo es bastante complicada. Lo anterior se
simplifica si se considera una solucin de estado estable en el dominio de la frecuencia para la
frecuencia fundamental del voltaje de excitacin. Considerando una fuente definida como:
(
= =
jwt
e X wt X t X Re ) cos( ) ( (2.55)
La corriente y el voltaje distribuidos estn dados por:
( )
(
=
jwt
e x V t x V ) ( Re ,
^
(2.56)
( )
(
=
jwt
e x I t x I ) ( Re ,
^
(2.57)
Considerando solamente la parte real del voltaje y la corriente:
( ) i jwL R
x
v
+ =
c
c
(2.58)
y
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 37 -
( ) v jwC G
x
i
+ =
c
c
(2.59)
Derivando (2.58) y substituyendo (2.59) en esta ecuacin tenemos:
( )( ) v jwC G jwL R
x
v
+ + =
c
c
2
2
(2.60)
y
( )( ) i jwC G jwL R
x
i
+ + =
c
c
2
2
(2.61)
El coeficiente ( )( ) jwC G jwL R + + es conocido como constante de propagacin .
Entonces:
v
x
v
2
2
2
=
c
c
(2.62)
i
x
i
2
2
2
=
c
c
(2.63)
La solucin de (2.62) y (2.63) est dada por
x x
x
e V e V v
+
+ =
(2.64)
y
x
c
x
c
x
e
Z
V
e
Z
V
i
+
=
(2.65)
Donde:
( )
( ) jwC G
jwL R
Z
c
+
+
= (2.66)
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 38 -
2.3.2 Parmetros Elctricos.
La lnea de transmisin es el elemento ms comn de los que conforman las redes elctricas.
En su conjunto, estos elementos constituyen las arterias a travs de las cuales fluye la energa
elctrica desde centros de generacin hasta centros de consumo. Excepto en pocas situaciones,
la transmisin de energa elctrica es area, de modo que el aislante comn entre conductores
es el aire circundante a los conductores.
En base a lo anterior, es necesario desarrollar un modelo matemtico que represente el
comportamiento de la lnea de transmisin area de corriente alterna y trifsica. Este modelo
se caracteriza por cuatro parmetros principales:
Resistencia serie.
Inductancia serie.
Conductancia en derivacin.
Capacitancia en derivacin.
a) Impedancia Serie.
Este parmetro est compuesto por los efectos resistivo e inductivo de la lnea. El desarrollo
de esta parte del modelo considerar el efecto de retorno por tierra.
Para condiciones normales de diseo, la reactancia correspondiente a la inductancia,
X
L
= eL, es la parte dominante de la impedancia serie, la cual determina el efecto sobre la
capacidad de transmitir y la cada de tensin. Este dominio de la inductancia sobre la
resistencia se aprecia por medio de la relacin x/r >> 1 para lneas de transmisin de alta
tensin.
A) IMPEDANCIA SERIE
B) ADMITANCIA EN DERIVACIN
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 39 -
El efecto de retorno por tierra consiste en considerar que las corrientes en las lneas tienen una
trayectoria de retorno a travs de los neutros de los equipos conectados a tierra. La tierra se
simula por medio de un conductor ficticio de longitud infinita, situado debajo de la superficie
del terreno que tiene una resistividad uniforme y es paralelo a la lnea de transmisin.
b) Admitancia Paralelo
La admitancia en paralelo de lneas de transmisin est formada bsicamente por dos
parmetros: conductancia y capacitancia. Sin embargo, el primero de ellos se desprecia por las
razones que se describen a continuacin. Este parmetro resulta de la observacin de las
corrientes de fuga describiendo una trayectoria de las fases a tierra. Principalmente, estas
corrientes fluyen a travs del aislador hacia la torre, siendo funcin de la eficiencia del
aislador, la cual vara significativamente con el calor, humedad atmosfrica, contaminacin y
salinidad del ambiente, entre otros factores. Por esta razn, obtener un modelo matemtico
representativo de este fenmeno, resulta una tarea compleja. Por otro lado, es comn
despreciar el efecto de estas corrientes de fuga, debido a que representan un porcentaje muy
pequeo con respecto a las corrientes nominales de la lnea.
2.3.2.1 Clculo de los Parmetros Elctricos.
Utilizando el concepto de imagen del conductor, Figura 2.10, es posible calcular los trminos
propios y mutuos de las matrices R, L y C [53], para dos conductores acoplados i, k:
Trminos de la resistencia propia y mutua:
ii ii
R R R A + =
int
/km
(2.67)
ik ik
R R A = /km
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 40 -
Figura 2.10. Imagen de los conductores
Trminos de la inductancia propia y mutua:
ii
i
i
ii
L
r
h
L L A + + =
2
log
2
0
int
t
H/km
(2.68)
ik
ik
ik
ik
L
d
D
L A + = log
2
0
t
H/km
Trminos de coeficientes de potencial propio y mutuo:
i
i
ii
r
h
P
2
log
2
1
0
=
tc
km/F
ik
ik
ik
d
D
P log
2
1
0
=
tc
km/F (2.69)
| | | |
1
= P C F/km
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 41 -
donde:
0
: permeabilidad del espacio libre =
4
10 4
t H/km
0
: permisividad del espacio libre =
9
10 8542 . 8
F/km
r
i
: radio del conductor i en metros
d
ik
: distancia entre los conductores i y k en metros
D
ik
: distancia entre el conductor i y la imagen de k en metros
h
i
: Promedio de altura de conductor i sobre tierra, en metros.
R
int
, L
int
: resistencia e inductancia interna del conductor
R
ii
, R
ik
: Correccin de Carson de R debido a la resistividad del terreno.
L
ii
, L
ik
: Correccin de Carson de L debido a la resistividad del terreno.
La inductancia propia del conductor tambin puede calcularse a partir de parmetros que
usualmente se encuentran en tablas de conductores: Radio Medio Geomtrico (GMR).
ii
i
ii
L
GMR
h
L A + =
2
log
2
0
t
H/km (2.70)
Para un conductor slido (T/D=0.5), el GMR est dado por:
4 /
r
e r GMR
= (2.71)
donde:
r = radio del conductor.
r
= Permeabilidad relativa del material conductor.
2.3.2.2 Power_lineparam
El comando de MATLAB power_lineparam abre una Interface Grafica de Usuario (GUI) que
utiliza la caracterstica de los conductores y la geometra de la torre de una lnea de
transmisin area, para calcular las matrices de resistencia, inductancia y capacitancia.
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 42 -
Para un conjunto de N conductores, power_lineparam calcula tres matrices de NxN: las
matrices de resistencia e inductancia series [R] y [L] y la matriz de capacitancia en derivacin
[C]. La Figura 2.11 muestra la Interfase Grafica de Usuario (GUI) que aparece al teclear el
comando power_lineparam en la ventana de comandos de MATLAB.
Figura 2.11 Interfase grafica de Usuario (GUI) Power_lineparam
La Figura 2.12 describe la geometra de la lnea de transmisin y los parmetros fsicos del
conductor que se deben introducir en la GUI.
A continuacin se describen los diferentes parmetros de la Interfase Grafica de Usuario
Power_lineparam [53]:
a) General Parameters
Unit, se especifica si se quieren usar unidades mtricas (centmetros) o inglesas (pulgadas).
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 43 -
Figura 2.12 Descripcin de la geometra de la lnea y las caractersticas de los conductores.
Frecuency, hay que especificar la frecuencia en hertz a ser utilizada para evaluar los
parmetros RLC.
Ground Resistivity, se especifica la resistividad del terreno en ohms por metro.
Comments, se utiliza para hacer comentarios de la lnea de transmisin.
b) Line Geometry
Number of phase conductors (bundles), especifica el nmero de conductores por fase que van
a ser utilizados.
Number of ground wires (bundles), especifica el nmero de hilos de guarda a utilizar.
Conductor, especifica si se trata de conductor de fase con p
i
o de un hilo de guarda con g
i
.
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 44 -
X, Ytower, Ymin, se describen en la Figura 2.12.
Conductor (bundle) type, especifica el nmero de conductor a usar en la tabla que aparece en
Conductor and Bundle Characteristics.
c) Conductor and Bundle Characteristics
Number of conductor types or bundle types, especifica cuantos tipos de conductores o hilos de
guarda se van a utilizar.
Conductor internal inductance evaluated from, especifica una de las siguientes opciones: T/D
ratio, Geometric Mean Radius GMR o reactance Xa de acuerdo a los parmetros fsicos que se
tengan disponibles de los conductores.
Include conductor skin effect, se marca si se requiere que se incluya en los clculos el efecto
skin de los conductores.
Conductor (bundle) type, especifica el numero del conductor que se coloc en Line Geometry.
Conductor outside diameter, especifica el dimetro exterior del conductor o hilo de guarda.
Conductor T/D ratio, especifica la relacin T/D del conductor donde T es el espesor del
material conductor y D es el dimetro exterior. Este valor vara entre 0 y 0.5, donde 0.5
corresponde a un conductor slido. Para cables de aluminio ASCR T/D est entre 0.3 y 0.4.
Conductor GMR, especifica el Radio Medio Geomtrico del conductor o hilo de guarda.
Conductor DC resistance, especifica la resistencia del conductor o hilo de guarda.
Conductor relative permeability, especifica la permeabilidad relativa
r
del material
conductor, donde
r
= 1.0 para materiales no magnticos como el aluminio o el cobre.
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 45 -
Number of conductors per bundle, especifica el nmero de conductores paralelados.
Bundle diameter, especifica la separacin entre conductores paralelados.
Angle of conductor, especifica el ngulo en grados que determina la posicin del primer
conductor a la lnea horizontal paralela a la tierra.
Una vez introducida la geometra de la lnea y los parmetros fsicos de los conductores e hilos
de guarda se da clic en la opcin Compute RLC line parameters. Esta opcin abre una ventana
en la que se muestran las matrices RLC de la lnea de transmisin.
La Figura 2.13 muestra las matrices RLC de los parmetros de la lnea de transmisin
introducidos en la Figura 2.11.
Para circuitos trifsicos power_lineparam tambin calcula los valores de las componentes
simtricas RLC. La Figura 2.14 muestra las componentes simtricas RLC parmetros de la
lnea de transmisin de la Figura 2.11
Figura 2.13 Parmetros elctricos RLC de la lnea de transmisin
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 46 -
Figura 2.14 Componentes simtricas RLC.
A partir de estos valores es posible obtener la velocidad de propagacin v y la impedancia
caracterstica de la lnea de transmisin Zc.
Velocidad de propagacin modo 1
1 1
1
v
C L
= (2.72)
Impedancia caracterstica modo 1
1
1
c
Z
C
L
= (2.73)
El apndice A muestra la configuracin y parmetros de la lnea de transmisin utilizada, estos
se introducen en la GUI Power_lineparam que calcula matrices L y C. Con estas matrices se
calcula la impedancia caracterstica de la lnea Z
c
y la velocidad de propagacin Vp de las
Ondas Viajeras.
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 47 -
2.3.3 Reflexin y Refraccin de Ondas Viajeras.
Toda falla que ocurre en una lnea de transmisin origina ondas viajeras de alta frecuencia.
Estas ondas se propagan a travs de la lnea siendo continuamente atenuadas y distorsionadas
hasta que se disipan. Al encontrar una discontinuidad, parte de la onda pasar a otras secciones
del sistema y el resto es reflejada y regresa al punto de falla. En el caso de que la impedancia
de la falla sea diferente a la de la lnea, entonces se reflejar una onda de voltaje de polaridad
opuesta y una onda de corriente de igual polaridad a las ondas de voltaje incidentes
respectivas.
En general, un punto de discontinuidad se presenta cuando existe un cambio de impedancia en
la trayectoria de las ondas viajeras [54]. Estos puntos de discontinuidad pueden presentarse en
la terminacin de la lnea de transmisin bien en puntos intermedios y generalmente son
buses, transformadores, otras lneas con impedancias diferentes, fallas, circuitos abiertos,
compensadores, FACTS, etc.
Considrense dos lneas con impedancias Z
A
y Z
B
como se muestra en la Figura 2.15, con
Z
A
Z
B
.
a)
b)
Figura 2.15 a). Lnea con diferente impedancia. b). Direccin de ondas de corriente en una lnea con
diferente impedancia.
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 48 -
Considrese que V
1
es una onda viajera de voltaje que se desplaza por la lnea de impedancia
Z
A
hacia la lnea de impedancia Z
B
. Esta onda de voltaje tiene asociada una corriente I
1
descrita
por:
A
Z
V
I
1
1
= (2.74)
En el punto de unin de las dos lneas se originar un voltaje reflejado, el cual es una onda
Regresiva, que en este caso ser V
2,
con una corriente I
2
descrita por,
A
Z
V
I
2
2
= (2.75)
V
3
ser la onda Progresiva de voltaje que atravesar el punto de unin de las dos lneas por lo
que I
3
es:
B
Z
V
I
3
3
= (2.76)
En consecuencia, el voltaje y corriente en el punto de discontinuidad ser:
3 2 1
V V V = + (2.77)
3 2 1
I I I = +
B A A
Z
V
Z
V
Z
V
3 2 1
= (2.78)
Sustituyendo la ecuacin 2.78 en 2.77 y reacomodando:
|
|
.
|
\
|
|
|
.
|
\
|
= +
A
B
A
B
Z
Z
V
Z
Z
V V V
2 1 2 1
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 49 -
( ) ( )
B A B A
Z Z V Z Z V + =
2 1
Por consiguiente, reacomodando trminos:
1 2
V
Z Z
Z Z
V
B A
B A
+
=
1 2
V
Z Z
Z Z
V
B A
A B
(
= (2.79)
El trmino
(
B A
A B
Z Z
Z Z
representa un coeficiente de reflexin de la onda reflejada en direccin
Regresiva.
De manera similar para V
3
, que en este caso representa una onda en direccin Progresiva,
tenemos:
1 1 3
V
Z Z
Z Z
V V
B A
A B
+
+ =
1 3
2
V
Z Z
Z
V
B A
B
(
+
= (2.80)
Donde el trmino
(
+
B A
B
Z Z
Z 2
representa el coeficiente de refraccin.
Si en el anlisis anterior se considera que V
1
corresponde a un voltaje de onda viajera V,
entonces V
2
representa un voltaje en direccin Regresiva V
r
, y V
3
representa un voltaje en
direccin Progresiva V
f
. Con estas consideraciones se tiene:
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 50 -
V k V
a f
=
(2.81)
V k V
b r
=
Donde V es la onda viajera de voltaje y V
f
V
r
son sus componentes generadas por el punto de
discontinuidad, siendo V
f
una onda refractada mientras que V
r
es una onda reflejada. Los
subndices r y f corresponden a las siglas en ingles forward y reverse respectivamente.
Asimismo, k
a
es un coeficiente de refraccin y k
b
es un coeficiente de reflexin, donde sus
valores especficos dependern del tipo de discontinuidad. Este mismo procedimiento se sigue
con las componentes de corriente, por lo que las componentes de reflexin y refraccin sern
I
r
e I
f
.
En general, el voltaje en direccin Progresiva puede expresarse como,
f f
I Z V
0
= (2.82)
Z
0
es la impedancia caracterstica de la lnea. De igual forma, el voltaje en direccin
Regresiva se puede expresar como,
r r
I Z V
0
= (2.83)
Por otro lado, la corriente y el voltaje que inciden sobre una discontinuidad sern:
r f t
V V V + = (2.84)
y
r f t
I I I + = (2.85)
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 51 -
2.3.4 Ondas viajeras en Terminaciones de Lnea.
Considrese una lnea de transmisin con impedancia caracterstica Z
0.
De las ecuaciones 2.82
y 2.83 se tiene que:
f
f
I
V
Z =
0
(2.86)
y
r
r
I
V
Z =
0
(2.87)
Si el voltaje y la corriente que inciden sobre el punto de discontinuidad son V
t
e I
t
, la
impedancia de la carga en la terminacin de la lnea es Z
t
y est determinada por:
t
t
t
I
V
Z = (2.88)
Ahora, substituyendo las ecuaciones 2.54 y 2.55 en 2.58, se tiene que Z
t
puede expresarse
como:
r f
r f
t
I I
V V
Z
+
+
= (2.89)
Sustituyendo I
f
e I
r
de las ecuaciones 2.82 y 2.83 se tiene que:
r f
r f
V V
V V
Z
Zt
+
=
0
Reacomodando:
0
0
Z Z
Z Z
V
V
t
t
f
r
+
= (2.90)
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 52 -
Donde la relacin
f
r
V
V
es el coeficiente de reflexin del voltaje y est representado por, k
v
, y
esta dado por:
0
0
Z Z
Z Z
k
t
t
v
+
= (2.91)
Similarmente, para la corriente k
i
se tiene que:
t
t
i
Z Z
Z Z
k
+
=
0
0
(2.92)
2.3.4.1 Lnea Terminada en Corto Circuito.
Cuando la lnea termina en corto circuito, el voltaje en la terminal fallada es cero. Por lo tanto,
el voltaje en esta terminal es:
0 = +
r f
V V
f r
V V = (2.93)
Sustituyendo V
f
y V
r
en las ecuaciones 2.82 y 2.83 y re-arreglando:
r f
I I = (2.94)
Sustituyendo las ecuaciones 2.93 y 2.94 en la ecuacin 2.89:
0 =
t
Z (2.95)
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 53 -
Ahora, con este valor de Z
t
se puede concluir que las ecuaciones 2.91 y 2.92, que corresponden
a los coeficientes de refraccin y reflexin, se obtienen los coeficientes para el voltaje y
corriente de:
1 =
v
k (2.96)
1 =
i
k (2.97)
2.3.4.2 Lnea Terminada en Circuito Abierto.
Cuando la lnea termina en circuito abierto, la corriente que fluye a travs de la lnea de
transmisin es cero. En este caso, la ecuacin 2.85 queda:
0 = +
r f
I I
r f
I I = (2.98)
Sustituyendo las ecuaciones 2.82 y 2.83 en 2.98:
f r
V V = (2.99)
Ahora bien, sustituyendo la ecuacin 2.98 en la ecuacin 2.99:
=
t
Z (2.100)
Por lo tanto, al sustituir Z
t
en las ecuaciones 2.91 y 2.92, que corresponden a los coeficientes
de refraccin y reflexin, se obtienen los coeficientes para el voltaje y corriente:
1 + =
v
k (2.101)
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 54 -
1 =
i
k (2.102)
2.3.4.3 Lnea Terminada en Resistencia
Cuando la lnea termina en una resistencia R, entonces, Z
t
=R por lo que los coeficientes de
refraccin y reflexin para el voltaje y corriente son:
0
0
Z R
Z R
k
v
+
= (2.103)
R Z
R Z
k
i
+
=
0
0
(2.104)
2.3.4.4 Otros Tipos de Terminaciones.
La Tabla 2.3 presenta una tabulacin de terminaciones simples que fueron desarrolladas por
Bewley [27]. Se parte del hecho de que la forma de la onda incidente es de la forma Ae
at
.
Tabla 2.3. Terminaciones de circuitos simples que describen el valor de una onda reflejada.
f r
V V =
f r
V V =
f r
V
z R
Z R
V
+
=
Circuito
Abierto
Resistencia a
tierra.
Corto
Circuito
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 55 -
|
|
.
|
\
|
+
=
t at
r
a a
a
A V
|
c
|
| o
c
|
o
L
Z
= = | o ,
Capacitancia a
Tierra
|
|
.
|
\
|
+
=
t at
r
a a
a
A V
|
c
|
| o
c
|
o
CZ
1
= = | o
Circuito Paralelo
RL a Tierra
|
|
.
|
\
|
+
|
.
|
\
|
+
=
t at
r
a a
a
A
Z R
Z R
V
|
c
|
| o
c
|
o
( ) Z R L
ZR
= o y
( ) Z R L
ZR
+
= |
Circuito Paralelo
RC a Tierra
|
|
.
|
\
|
+
=
t at
r
a a
a
A V
|
c
|
| o
c
|
o
ZRC
Z R
= o y
ZRC
Z R+
= |
2.4 CONCLUSIONES DEL CAPTULO.
En este captulo se present una introduccin general a las lneas de transmisin, sus
estructuras, tipos de conductores e hilos de guarda utilizados. Posteriormente, se desarrollaron
las ecuaciones de la lnea de transmisin trifsica y su transformacin modal, la cual permite
reducir un grupo de ecuaciones acopladas a tres sistemas monofsicos desacoplados.
Enseguida se presentaron las ecuaciones que describen el fenmeno de propagacin de ondas
viajeras sin perdidas y con retorno por tierra, describindose la solucin propuesta por
DAlembert. Este procedimiento se extendi a una lnea con perdidas y en ambos casos se
dedujeron las ecuaciones que describen la impedancia caracterstica de la lnea Z
c
.
Inductancia a
Tierra
Captulo 2. Lneas de Transmisin
P.G.I .I .E
- 56 -
Ms adelante, se presentaron dos opciones para el clculo de los parmetros elctricos de la
lnea de transmisin, una analtica y otra utilizando el comando Power_lineparam de
MATLAB.
Por ltimo, se analiz el fenmeno de reflexin y refraccin de las Ondas Viajeras en las
lneas de transmisin, as como el comportamiento de las mismas ante diferentes tipos de
terminacin.
P.G.I .I .E
- 57 -
CAPTULO 3
DETECCIN Y DISCRIMINACIN
DIRECCIONAL DE LA FALLA.
3.1 INTRODUCCIN.
Algoritmos basados en la frecuencia fundamental.
Los primeros relevadores que se utilizaron en la proteccin de lneas de transmisin fueron
electromecnicos. Hacia 1902 se emplearon los primeros relevadores de sobrecorriente, pero
debido a los largos tiempos de operacin, stos no se pueden utilizar en la proteccin de
sistemas que requieren una rpida liberacin de fallas [52].
Despus de 1905, los esquemas de proteccin diferencial reemplazaron la proteccin de
sobrecorriente. Estos esquemas de proteccin comparan las corrientes en los extremos
opuestos de la lnea de transmisin y usan un canal de comunicacin para transmitir la
informacin requerida. Alrededor de 1909 se introdujo el concepto de discriminacin
direccional.
El desarrollo de relevadores de distancia basados en medicin de impedancia empez a
desarrollarse en 1923. Hasta 1940 todos los relevadores de distancia fueron del tipo
electromecnico. Estos relevadores alcanzaron una alta precisin, principalmente el relevador
de distancia tipo Mho. El principio del relevador tipo Mho fue ampliamente incorporado en la
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 58 -
mayora de los esquemas de proteccin de distancia e incluso en la actualidad es ampliamente
aplicado en los relevadores de distancia.
A principios de 1940 se empezaron a utilizar los relevadores estticos que utilizaban
dispositivos electrnicos. Los primeros relevadores estticos fueron diseados utilizando
vlvulas trmicas, pero tena desventajas frente a los relevadores electromecnicos debido a la
corta vida de las vlvulas trmicas. Las ventajas de estos relevadores era que los transistores
permitan desarrollar diferentes esquemas de proteccin de distancia. Utilizando circuitos con
transistores se desarrollaron varios conceptos nuevos durante este periodo, por ejemplo el
esquema de comparacin de fase.
El concepto de muestreo de seales y el desarrollo de las computadoras digitales (1960),
propici el desarrollo de esquemas de proteccin digitales [46]. Las tcnicas digitales
demostraron una gran flexibilidad de diseo, adems de mejorar la confiabilidad. En los
relevadores digitales de distancia, la impedancia aparente vista desde la posicin del relevador
se calcula a partir de las seales de voltaje y corriente muestreadas. La impedancia vista por el
relevador es proporcional a la distancia a la falla. La estimacin digital de la distancia a la falla
es exacta cuando las seales de voltaje y corriente son senoidales puras de 60hz. Sin embargo,
la presencia de fenmenos transitorios afecta la precisin con la que se estima la impedancia y
por tanto la distancia calculada a la falla puede ser incorrecta.
En 1975 McLaren y Redfern reconocieron la presencia de fenmenos transitorios en la forma
de onda. Ellos sugirieron el uso de Series de Fourier para extraer las componentes
fundamentales de voltaje y corriente. Las componentes a frecuencia fundamental se utilizan
por los relevadores para el clculo de la impedancia aparente.
Despus de esto se propusieron diferentes tcnicas para extraer la informacin de frecuencia
fundamental y estimar la impedancia de la lnea de transmisin, por ejemplo: filtros de
mnimos cuadrados (Least Square), filtros Kalman, filtros basados en la Transformada de
Fourier y Mtodos de Correlacin. Los relevadores modernos utilizan mtodos basados en la
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 59 -
Transformada Discreta de Fourier (DFT) o Transformada Rpida de Fourier (FFT), a fin de
extraer las componentes de frecuencia fundamental. En un ciclo, la DFT o la FFT son capaces
de extraer las componentes de frecuencia fundamental adecuadamente mientras eliminan los
harmnicos de alto orden. Todos los relevadores de distancia modernos se desarrollan
utilizando Procesadores Digitales de Seal (DSPs) de alta velocidad [52].
Algoritmos basados en seales transitorias.
Los algoritmos basados en la frecuencia fundamental utilizan filtros que atenan las seales
de alta frecuencia generadas por fenmenos transitorios originados por las fallas. El proceso
de filtrado trae consigo un retardo de tiempo que no puede ser eliminado de los algoritmos.
Los esfuerzos para incrementar la velocidad de los relevadores de distancia han demostrado
que al acelerar la velocidad del relevador se afecta la precisin de la medicin de impedancia.
Actualmente, el mtodo ms ampliamente utilizado para localizar fallas en lneas areas
consiste en determinar la reactancia aparente de la lnea durante el tiempo en el que la
corriente de falla fluye y convertir el resultado obtenido (en Ohms) en distancia basado en los
parmetros de la lnea. Sin embargo, est demostrado que este mtodo es propenso a errores
cuando el arco de falla es inestable, cuando la resistencia de falla es alta y la lnea es
alimentada por ambos extremos, y cuando existen circuitos paralelos sobre alguna parte de la
longitud de la lnea en falla. Adems, el mtodo es inadecuado para utilizarlo en lneas con
compensacin serie o lneas de Corriente Directa (HVDC).
La necesidad de mejorar los tiempos de eliminacin de las fallas motiv a muchos
investigadores a considerar seales transitorias de alta frecuencia para utilizarlas en los
relevadores. Con el desarrollo de la tecnologa digital se han investigado diferentes tcnicas de
proteccin basadas en seales transitorias de alta frecuencia. En particular, se han utilizado
seales incrementales para hacer una comparacin direccional y tcnicas de ondas viajeras
para determinar la distancia a la falla.
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 60 -
Los resultados obtenidos por los relevadores de onda viajera durante los aos 50s fueron
alentadores y los sistemas fueron clasificados en distintos tipos (A, B, C y D), de acuerdo a su
principio de funcionamiento. Sin embargo, los costos de instalacin, operacin y
mantenimiento de estos dispositivos fueron elevados y sus aplicaciones estaban limitadas. No
obstante, durante la dcada de 1960s muchas lneas de 275kV y 400kV fueron equipadas con
localizadores tipo C en el Reino Unido [55].
3.2 PRINCIPIO DE OPERACIN DEL ESQUEMA DE PROTECCIN CON ONDAS
VIAJERAS.
Las ondas viajeras originadas por una falla se propagan aproximadamente a la velocidad de la
luz en ambas direcciones de la lnea y se reflejan en discontinuidades, incluyendo el propio
punto de falla. Las repetidas reflexiones de estas seales producen transitorios de alta
frecuencia que se van atenuando con el tiempo. Las ondas viajeras estn compuestas de
frecuencias que van desde unos cuantos kilohertz hasta varios megahertz y tienen una
impedancia caracterstica que depende de los parmetros de la lnea. En lneas de transmisin
de extra alto voltaje, donde la longitud de la lnea y la capacitancia del sistema son grandes,
estos transitorios se vuelven significativos, especialmente cuando la resistencia de falla es
pequea.
3.2.1 Principio de Superposicin (Seales Incrementales).
Una red bajo condiciones de falla puede ser descrita utilizando el principio de superposicin
como se muestra en la Figura 3.1. Las seales de voltaje y corriente son medidas en la
posicin del relevador R.
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 61 -
Figura 3.1 Principio de superposicin aplicado a una red fallada.
Considrese una lnea con una falla a tierra en el punto F, Figura 3.1 (a). La insercin de una
falla en el sistema de potencia origina voltajes (v) y corrientes (i) de post-falla en la posicin
del relevador R, los cuales se desvan de sus valores de estado estable de pre-falla (v i).
Las componentes incrementales se pueden simular por medio de la apertura y cierre de una
fuente de voltaje ficticia en el punto de falla con un voltaje igual en magnitud y polaridad
opuesta al voltaje de pre-falla.
La superposicin de las seales de pre-falla en la Figura 3.1 (b) y las seales incrementales de
la Figura 3.1 (c) producen seales de post-falla.
( ) ( ) ( ) t v t v t v A + = '
(3.1)
( ) ( ) ( ) t i t i t i A + = '
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 62 -
donde
( ) t v A es la seal incremental de voltaje
( ) t v es el voltaje de post-falla
( ) t i A es la seal incremental de corriente
( ) t i es el voltaje de post-falla
Las seales incrementales ( ) t v A y ( ) t i A se pueden obtener restando los voltajes y corrientes
de estado estable (valores de pre-falla tomados exactamente un ciclo atrs) de los voltajes y
corrientes de post-falla:
( ) ( ) ( ) t v t v t v ' = A
(3.2)
( ) ( ) ( ) t i t i t i ' = A
Bajo condiciones de estado estable, las cantidades incrementales son casi cero, excepto por la
presencia de ruido. Cuando se presenta una falla ( ) t v A y ( ) t i A toman valores muy grandes,
ver Figura 3.2.
Las seales incrementales se utilizan en los esquemas de proteccin de Ultra Alta Velocidad
(UHS por sus siglas en ingles) basados en ondas viajeras.
(f ile GPS2.pl4; x-v ar t) v :X0038A
0 5 10 15 20 25 30 35
[ms]
-500
-375
-250
-125
0
125
250
375
500
[kV]
Voltaje de
Post-falla
Voltaje de
Pre-falla
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 63 -
Figura 3.2 Seal incremental de voltaje.
La magnitud del voltaje ( ) t v A depender de la amplitud del voltaje en el instante de falla, de
los valores de impedancia de las fuentes y la lnea y de la resistencia de falla. La magnitud de
la seal ( ) t v A es mxima para fallas que ocurren en el momento en que el voltaje es mximo,
mientras que ( ) t v A es casi cero para fallas que ocurren cuando el voltaje es cero. La magnitud
de corriente ( ) t i A contiene una componente de decaimiento exponencial cuya magnitud
depender del ngulo de insercin de la falla. La componente exponencial es mxima para
fallas que ocurren cuando el voltaje es cero, y es cero para fallas que ocurren cuando el voltaje
es mximo. La resistencia de falla reduce la magnitud de la magnitud de los incrementos de
voltaje y corriente [46].
3.2.2 Ondas Viajeras
Para ilustrar el fenmeno de ondas viajeras, se puede utilizar el diagrama de Bewley Lattice.
La Figura 3.3 muestra el diagrama de Lattice de un sistema monofsico.
Para una falla que ocurre delante del relevador, los frentes de onda que viajan del punto de
falla a la posicin del relevador R son conocidos como ondas viajeras regresivas. Estos frentes
de onda viajarn a travs de R y se reflejarn en el bus A. Las ondas reflejadas viajarn de
regreso al punto de falla. Por otra parte, los frentes de onda que viajan de la posicin del
relevador al punto de falla son conocidos como ondas viajeras progresivas. Cuando estas
(f ile GPS2.pl4; x-v ar t) m:DVA
0 5 10 15 20 25 30 35
[ms]
-500
-350
-200
-50
100
250
400
*10
3
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 64 -
ondas llegan a F, parte de estas ondas se reflejarn mientras que otra parte se propagarn hacia
el bus B.
La magnitud de las ondas reflejadas y refractadas depender de la impedancia de falla y la
impedancia de la lnea de transmisin. Las componentes reflejadas regresaran hacia la
posicin del relevador. Los frentes de onda que viajan hacia el bus B desde el punto de falla F
sern reflejados por el bus B y arribarn a F de nuevo. Parte de esta onda ser transmitida
hacia R y otra parte ser reflejada hacia el bus B. Estos frentes de onda continuarn
refractndose y reflejndose de esta manera hasta que se extinguen.
Figura 3.3 Diagrama de Bewley Lattice de los frentes de onda generados por una falla.
Las seales de voltaje y corriente en la lnea de transmisin pueden considerarse como la suma
de la onda viajera regresiva F
1
y la onda viajera progresiva F
2
.
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 65 -
La solucin de DAlembert [56] de las ecuaciones de onda, de voltaje v(x,t) y corriente i(x,t),
en una lnea de transmisin monofsica con parmetros distribuidos y sin perdidas, se expresa
como:
( ) ( ) ( ) ut x F ut x F t x v + =
2 1
, (3.3)
( ) ( ) ( ) | | ut x F ut x F
Z
t x i
C
=
2 1
1
, (3.4)
Donde x es la posicin a lo largo de la lnea, t es el tiempo, u es la velocidad de propagacin,
y Z
C
es la impedancia caracterstica de la lnea. Si L y C representan la inductancia serie y la
capacitancia paralelo por unidad de longitud respectivamente, entonces:
C
L
Z
C
=
LC
u
1
= (3.5)
Las funciones F
1
y F
2
dependen de las condiciones de frontera del caso que se este
analizando. F
1
es constante si (x-ut) es constante, y puede por consiguiente interpretarse como
una funcin que se desplaza en la direccin positiva de x a una velocidad u mientras que F
2
puede ser considerada como una funcin que se desplaza en la direccin negativa de x a
velocidad u. La relacin entre voltaje y corriente en F
1
es Z
C
y en F
2
es Z
C
. Esto es una
simple consecuencia de definir la corriente positiva para una onda que se mueve en la
direccin positiva de x.
Si el voltaje y la corriente son medidos en la posicin x, es posible separar la onda progresiva
F
1
y la onda regresiva F
2
. Al combinar (3.3) y (3.4) se tiene:
( ) ( ) ( ) ( ) t x i Z t x v ut x F t S
c
, , 2
1 1
+ = =
(3.6)
( ) ( ) ( ) ( ) t x i Z t x v ut x F t S
c
, , 2
2 2
= + =
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 66 -
S
1
representa los cambios en la seal en el punto del relevador debido a ondas que viajan del
relevador al punto de falla, mientras que S
2
representa cambios en la seal debido a ondas que
viajan del punto de falla al relevador.
Si la medicin de voltaje y corriente se realiza en el punto de localizacin del relevador (x=0),
entonces las seales S
1
y S
2
son:
( ) ( ) ( ) ( ) t i Z t v ut F t S
c
, 0 , 0 2
1 1
+ = =
(3.7)
( ) ( ) ( ) ( ) t i Z t v ut F t S
c
, 0 , 0 2
2 2
= =
Estas ecuaciones pueden expresarse como:
( ) ( ) ( ) t i Z t v t S
c
+ =
1
(3.8)
( ) ( ) ( ) t i Z t v t S
c
=
2
Utilizando seales incrementales de voltaje y corriente en las ecuaciones (3.8):
( ) ( ) ( ) t i Z t v t S
c
A + A =
1
(3.9)
( ) ( ) ( ) t i Z t v t S
c
A A =
2
3.2.3 Transformacin modal
El anlisis anterior es vlido para un sistema monofsico. En lneas de transmisin trifsicas
los acoplamientos mutuos entre conductores dificultan el anlisis de ondas viajeras. Para
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 67 -
simplificar los clculos es necesario descomponer las seales de fase en sus correspondientes
modos de propagacin, obtenindose dos modos areos y uno de tierra, cada uno con su propia
atenuacin y velocidad de propagacin.
La transformacin modal puede expresarse por:
( )
( ) ( ) t v S t v
f
m
A = A
1
(3.10)
( )
( ) ( ) t i Q t i
f
m
A = A
1
Donde ( ) t v
f
A , ( ) t i
f
A son los voltajes y corrientes incrementales de fase y
( )
( ) t v
m
A ,
( )
( ) t i
m
A
son sus correspondientes voltajes y corrientes modales. S y Q son las matrices de
transformacin, siendo las ms comunes las de componentes simtricas, Karrenbauer, Clarke
y Wedephol.
Transformacin de Karrenbauer:
( )
( )
( )
(
(
(
A
A
A
(
(
(
=
(
(
(
A
A
A
c
b
a
v
v
v
v
v
v
1 0 1
0 1 1
1 1 1
3
1
2
1
0
( )
( )
( )
(
(
(
A
A
A
(
(
(
=
(
(
(
A
A
A
c
b
a
i
i
i
i
i
i
1 0 1
0 1 1
1 1 1
3
1
2
1
0
(3.11)
Transformacin de Clarke:
( )
( )
( )
(
(
(
A
A
A
(
(
(
(
=
(
(
(
A
A
A
c
b
a
v
v
v
v
v
v
3
1
3
1
0
1 1 2
1 1 1
3
1
2
1
0
( )
( )
( )
(
(
(
A
A
A
(
(
(
(
=
(
(
(
A
A
A
c
b
a
i
i
i
i
i
i
3
1
3
1
0
1 1 2
1 1 1
3
1
2
1
0
(3.12)
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 68 -
Transformacin de Wedepohl:
( )
( )
( )
(
(
(
A
A
A
(
(
(
(
(
(
=
(
(
(
A
A
A
c
b
a
v
v
v
v
v
v
2
1
1
2
1
2
3
0
2
3
1 1 1
3
1
2
1
0
( )
( )
( )
(
(
(
A
A
A
(
(
(
(
(
(
=
(
(
(
A
A
A
c
b
a
i
i
i
i
i
i
2
1
1
2
1
2
3
0
2
3
1 1 1
3
1
2
1
0
(3.13)
Al utilizar una transformacin modal y sustituir la ecuacin (3.10) en (3.9) se tiene:
( ) ( ) ( ) ( ) m m
c
m m
i Z v S A + A =
1
(3.14)
S
1
(m)
y S
2
(m)
son conocidas como seales del relevador de onda viajera, donde m representa el
modo 0, 1 y 2 que se utiliz para obtener estas seales. S
1
(m)
y S
2
(m)
se utilizan para efectuar la
deteccin, discriminacin direccional de la falla y distancia a la misma desde la posicin del
relevador. En adelante slo se utilizar S
1
y S
2
para denotar las seales de onda viajera y en
casos especiales (donde se requiera) se especificar el modo areo o de tierra utilizado para
obtener dichas seales.
Al utilizar transformacin modal en las seales de onda viajera (Clarke, Karrenbauer y
Wedephol) se origina un modo de tierra [Modo 0] y dos modos areos [Modo 1 y 2]. El modo
de tierra es la componente de secuencia cero y su velocidad (3/4 de la velocidad de la luz) y
atenuacin son afectadas por la resistividad de la tierra y por el tipo de falla. Por otra parte, los
modos areos son independientes de la frecuencia y su velocidad de propagacin es
aproximadamente la velocidad de la luz.
( ) ( ) ( ) ( ) m m
c
m m
i Z v S A A =
2
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 69 -
Para propsitos de comparacin, en la Figura 3.4 se muestra el comportamiento del modo de
tierra (modo 0) y de los modos areos (modos 1 y 2) para una falla AB. Por otro lado, en la
Figura 3.5 se muestra el comportamiento de los modos de tierra y areos para una falla AB-G.
En ambos casos se utiliz la transformacin de Clarke.
Obsrvese que cuando las fallas no involucran tierra, las seales S
1
y S
2
para el modo 0 son de
magnitud muy pequea, ver Figura 3.4a. Por otra parte, para fallas que involucran tierra las
seales S
1
(0)
y S
2
(0)
alcanzan magnitudes considerables, ver Figura 3.5a, es por esta razn que
comnmente al modo 0 tambin se le conoce como modo de tierra. En las Figuras 3.4 y 3.5
tambin se observa que los modos areos se comportan de la misma manera para fallas que
involucran tierra que para fallas entre fases.
a) b)
c)
Figura 3.4 Seales de relevador S
1
(m)
y S
2
(m)
, falla AB. a) S
1,2
(0)
b) S
1,2
(1)
c) S
1,2
(2)
(f ile Sistema1.pl4; x-v ar t) m:DFA m:DRA
20 25 30 35 40 45 [ms]
-0.16
-0.12
-0.08
-0.04
0.00
0.04
0.08
0.12
0.16
(f ile Sistema1.pl4; x-v ar t) m:DFA m:DRA
20 25 30 35 40 45 [ms]
-5.00
-3.75
-2.50
-1.25
0.00
1.25
2.50
3.75
5.00
*10
6
(f ile Sistema1.pl4; x-v ar t) m:DFB m:DRB
20 25 30 35 40 45 [ms]
-900
-600
-300
0
300
600
900
*10
3
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 70 -
a) b)
c)
Figura 3.5 Seales de relevador S
1
(m)
y S
2
(m)
, falla AB-G. a) S
1,2
(0)
b) S
1,2
(1)
c) S
1,2
(2)
3.3 DETECCIN Y DISCRIMINACIN DIRECCIONAL DE LA FALLA.
3.3.1 Funciones de Deteccin y Discriminacin de Falla de Michels.
Las funciones de onda viajera S
1
y S
2
se calculan utilizando componentes incrementales de las
seales de voltaje y de corriente, que idealmente son de magnitud cero cuando el sistema de
potencia opera bajo condiciones de estado estable. Sin embargo, cuando una falla ocurre en el
sistema, las componentes incrementales de voltaje y corriente varan significativamente de sus
valores de estado estable, entonces S
1
y S
2
incrementan significativamente sus magnitudes. Un
cambio en las magnitudes de S
1
y S
2
puede indicar disturbios en la lnea. Dependiendo de la
localizacin de la falla y de la posicin del relevador, la secuencia en la cual las seales S
1
y S
2
rebasan cierta magnitud puede variar. Por lo tanto, la direccin de la falla puede determinarse
si se analiza la secuencia en la cual S
1
y S
2
exceden un cierto lmite [46].
(f ile Sistema1.pl4; x-v ar t) m:DFA m:DRA
20 25 30 35 40 45 [ms]
-900
-600
-300
0
300
600
900
*10
3
(f ile Sistema1.pl4; x-v ar t) m:DFA m:DRA
20 25 30 35 40 45 [ms]
-5.00
-3.75
-2.50
-1.25
0.00
1.25
2.50
3.75
5.00
*10
6
(f ile Sistema1.pl4; x-v ar t) m:DFB m:DRB
20 25 30 35 40 45 [ms]
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
*10
6
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 71 -
El comportamiento de las funciones S
1
y S
2
depende del ngulo de insercin de la falla. La
identificacin de la condicin de falla y su direccin se puede mejorar si se utilizan funciones
que sean independientes del ngulo de insercin de la falla. En 1978 Michels propuso dos
funciones de discriminacin que se calculan utilizando las funciones S
1
, S
2
y sus derivadas.
Estas funciones de discriminacin se basan en el principio de que aunque la funcin seno es
pequea al inicio, su derivada es bastante grande. Estas funciones de discriminacin se
definen como:
( ) ( )
2
) (
1
2
) (
1
1
)
`
+ =
m m
f
S
dt
d
S d
e
(3.15)
( ) ( )
2
) (
2
2
) (
2
1
)
`
+ =
m m
r
S
dt
d
S d
e
Las seales d
f
y d
r
son conocidas como funciones de discriminacin de Michels. Si se analiza
la Ecuacin 3.15 se puede deducir que las funciones d
f
y d
r
son de magnitud positiva. Las
Figuras 3.6 y 3.7 muestran el comportamiento de las seales de relevador S
1
y S
2
y las
funciones de discriminacin d
f
y d
r
para diferentes ngulos de insercin de la falla. Estas
seales se obtuvieron al simular una falla A-G a 80 km del relevador y se utiliz el modo 1 de
la transformacin de Wedephol.
a) b)
Figura 3.6. Seales de relevador S
1
(1)
y S
2
(1)
. a) POW=180 b) POW=270
(f ile Sistema1.pl4; x-v ar t) m:DFA m:DRA
15 20 25 30 35 40 45
[ms]
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
*10
6
(f ile Sistema1.pl4; x-v ar t) m:DFA m:DRA
15 20 25 30 35 40 45
[ms]
-1.2
-0.8
-0.4
0.0
0.4
0.8
1.2
*10
6
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 72 -
a) b)
Figura 3.7. Seales de relevador d
f
(1)
y d
r
(1)
. a) POW=180 b) POW=270
El criterio de deteccin de fallas en lneas de transmisin usando las funciones de
discriminacin de Michels es:
Cuando las seales d
f
y d
r
sobrepasan cierto valor de ajuste predeterminado, entonces se
tiene una condicin de falla.
La Figura 3.8 muestra las funciones de discriminacin d
f
y d
r
ante la presencia de falla, el
nivel de ajuste de falla se eligi a travs de un estudio en el que se analizaron distintos tipos de
fallas las cuales se simularon a diferentes distancias de la lnea de transmisin, bajo distintos
ngulos de insercin y valores de impedancia de la falla.
Figura 3.8 Criterio de deteccin de falla en lneas de transmisin
utilizando Ondas Viajeras.
(f ile Sistema1.pl4; x-v ar t) m:DF1 m:DR1
15 20 25 30 35 40 45
[ms]
0.0
0.4
0.8
1.2
1.6
2.0
*10
6
(f ile Sistema1.pl4; x-v ar t) m:DF1 m:DR1
15 20 25 30 35 40 45 50
[ms]
0
10
20
30
40
50
*10
6
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 73 -
Por otra parte, el criterio para determinar la direccin de la falla es el siguiente:
Si d
f
excede un cierto lmite antes que d
r
, entonces la falla es detrs del relevador, de lo
contrario la falla es delante del relevador.
La Figura 3.9 muestra el comportamiento de las funciones de discriminacin d
f
y d
r
para
fallas que ocurren delante de la posicin del relevador (Figura 3.9a y 3.9b) y para fallas que
ocurren detrs del relevador (Figura 3.9c)
a) b)
c)
Figura 3.9. Funciones de discriminacin d
f
y d
r
. a) Falla detrs del relevador b) zoom del inciso a.
c) Falla detrs del relevador
A continuacin se analiza la confiabilidad del mtodo de discriminacin de Michels ante
sistemas ms complejos. Las funciones d
f
y d
r
se obtienen mediante el modo 1 de la
transformacin de Clarke.
(f ile Sistema1.pl4; x-v ar t) m:DF1 m:DR1
25.0 25.4 25.8 26.2 26.6 27.0 [ms]
0
10
20
30
40
50
*10
6
(f ile Sistema1.pl4; x-v ar t) m:DF1 m:DR1
25.25 25.27 25.29 25.31 25.33 25.35 25.38
[ms]
0
10
20
30
40
50
*10
6
(f ile Sistema1.pl4; x-v ar t) m:DF1 m:DR1
25.0 25.5 26.0 26.5 27.0 27.5 28.0
[ms]
0
5
10
15
20
25
30
*10
6
d
f
d
r
d
f
d
r
d
r
d
f
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 74 -
Caso A. Protegiendo Lnea 1
La Figura 3.11 muestra las funciones de discriminacin d
f
y d
r
para una falla monofsica A-G
simulada en el sistema de prueba 1 de la Figura 3.10.
Figura 3.10 Sistema de prueba 1.
La Figura 3.11a muestra las funciones d
f
y d
r
para una falla a 80km delante de la posicin del
relevador (dentro de la zona de proteccin). En la Figura 3.11b se observa que para fallas que
ocurren delante de la posicin del relevador se asigna a la variable falla el valor de 1, lo cual
activa el algoritmo de localizacin. La Figura 3.11c muestra las seales d
f
y d
r
para una falla
que sucede a 280 km delante de la posicin relevador pero fuera de la zona de proteccin. Por
ltimo, en la Figura 3.11d se muestra la activacin del algoritmo de localizacin a travs de la
variable falla. Obsrvense los cambios en magnitud de d
f
y d
r
, as como el retraso en la
activacin del algoritmo de localizacin, debido a que las Ondas Viajeras tardan ms tiempo
en arribar a la posicin del relevador.
a) b)
(f ile Sistema1.pl4; x-v ar t) m:DF1 m:DR1
25.0 25.2 25.4 25.6 25.8 26.0 [ms]
0
10
20
30
40
50
60
70
*10
6
(f ile Sistema1.pl4; x-v ar t) m:FALLA
20 22 24 26 28 30 [ms]
0.0
0.2
0.4
0.6
0.8
1.0
d
f
d
r
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 75 -
c) d)
Figura 3.11 Seales d
f
y d
r
. a) dentro de la zona de proteccin c) delante de la zona de
proteccin.
Caso B. Protegiendo Lnea 2
El caso B analiza las seales d
f
y d
r
cuando el relevador protege la lnea 2 del sistema de
potencia de la Figura 3.10.
a) b)
c) d)
Figura 3.12 Funciones de discriminacin d
f
y d
r
. a,b) dentro de la zona de proteccin c,d)
atrs de la zona de proteccin.
(f ile Sistema1.pl4; x-v ar t) m:DF1 m:DR1
25.0 25.4 25.8 26.2 26.6 27.0 [ms]
0
5
10
15
20
25
*10
6
(f ile Sistema1.pl4; x-v ar t) m:FALLA
20 22 24 26 28 30 [ms]
0.0
0.2
0.4
0.6
0.8
1.0
(f ile Sistema1.pl4; x-v ar t) m:DF1 m:DR1
25.0 25.2 25.4 25.6 25.8 26.0 [ms]
0
10
20
30
40
50
*10
6
(f ile Sistema1.pl4; x-v ar t) m:FALLA
20 22 24 26 28 30 [ms]
0.0
0.2
0.4
0.6
0.8
1.0
(f ile Sistema1.pl4; x-v ar t) m:DF1 m:DR1
24 25 26 27 28 29 30 31
[ms]
0
5
10
15
20
25
30
35
40
*10
6
(f ile Sistema1.pl4; x-v ar t) m:FALLA
20 22 24 26 28 30 [ms]
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
d
f
d
r
d
f
d
r
d
f
d
r
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 76 -
En la Figura 3.12 se observa que para fallas que ocurren detrs de la posicin del relevador, la
variable falla permanece en cero, de esta forma se bloquea el algoritmo de localizacin y la
seal de disparo de los interruptores de potencia.
En la Figura 3.13 se muestra el sistema de potencia simulado en ATP/EMTP, la configuracin
y parmetros de la lnea de transmisin se describen en el apndice A.
Figura 3.13. Sistema de prueba 1 simulado en ATP/EMTP.
La Figura 3.14 muestra un sistema de potencia [33] utilizado para analizar el comportamiento
de los mtodos de deteccin y discriminacin direccional en sistemas ms interconectados.
Figura 3.14 Sistema de prueba 2.
Caso A. Protegiendo Lnea 1
El caso A analiza el comportamiento de las funciones de discriminacin d
f
y d
r
cuando el
relevador protege la lnea 1 del sistema de prueba 2 de la Figura 3.14.
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 77 -
La Figura 3.15a muestra las funciones de discriminacin d
f
y d
r
para una falla A-G a 80 kms
del relevador dentro de la lnea 1. Una vez que se detecta y se discrimina la direccin de la
falla se le asigna a la variable falla el valor 1, lo cual activa el algoritmo de localizacin.
Las Figuras 3.15a, 3.15b y 3.15c muestran fallas A-G a 80km de la lnea 2, 3 y 4
respectivamente. Obsrvese que para una falla a 80km de la lnea 3 la seal d
f
llega primero al
relevador que la seal d
r
, lo cual indica una falla detrs de la posicin del relevador, por lo que
se bloquea el algoritmo de localizacin y el disparo del interruptor.
a) Lnea 1. Falla = 1. b) Lnea 2. Falla = 1
c) Lnea 3. Falla = 0 d) Lnea 4. Falla = 1
Figura 3.15 Funciones de discriminacin d
f
y d
r
.
Cuando la falla es delante de la posicin del relevador se activa el algoritmo de localizacin y
si ste determina que la distancia a la falla es menor que la longitud de la lnea de transmisin
entonces se activa el interruptor, el cual libera la falla.
(f ile Sistema2.pl4; x-v ar t) m:DF1 m:DR1
24.6 24.8 25.0 25.2 25.4 25.6 25.8 26.0 26.2
[ms]
0
10
20
30
40
50
60
*10
6
(f ile Sistema2.pl4; x-v ar t) m:DF1 m:DR1
25.5 25.8 26.1 26.4 26.7 27.0 [ms]
0
3
6
9
12
15
*10
6
(f ile Sistema2.pl4; x-v ar t) m:DF1 m:DR1
24.5 25.0 25.5 26.0 26.5 27.0
[ms]
0
10
20
30
40
50
*10
6
(f ile Sistema2.pl4; x-v ar t) m:DF1 m:DR1
25.4 25.6 25.8 26.0 26.2 26.4 26.6 26.8
[ms]
0
3
6
9
12
15
*10
6
d
f
d
r
d
f
d
r
d
f
d
r
d
f
d
r
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 78 -
Caso B. Protegiendo Lnea 4
El caso B analiza el comportamiento de las funciones de discriminacin d
f
y d
r
cuando el
relevador protege la lnea 4 del sistema de prueba 2 de la Figura 3.14.
En la Figura 3.16a se observa que cuando se simula una falla dentro de la lnea protegida
(lnea 4) el algoritmo de discriminacin asigna a la variable falla el valor de 1, lo cual activa el
algoritmo de localizacin.
Las Figuras 3.16a, 3.16b y 3.16c muestran que cuando se simulan fallas en las lneas 1, 2 y 3
respectivamente, el algoritmo de discriminacin detecta las fallas detrs de la posicin del
relevador y por ende se bloquea el algoritmo de localizacin asignando el valor cero a la
variable falla.
a) Lnea 4. Falla = 1. b) Lnea 3. Falla = 0
c) Lnea 1. Falla = 0 d) Lnea 2. Falla = 0
Figura 3.16 Funciones de discriminacin d
f
y d
r
.
(f ile Sistema2.pl4; x-v ar t) m:DF1 m:DR1
25.1 25.2 25.3 25.4 25.5 25.6 25.7 25.8 25.9
[ms]
0
10
20
30
40
50
60
*10
6
(f ile Sistema2.pl4; x-v ar t) m:DF1 m:DR1
25.0 25.5 26.0 26.5 27.0 27.5 28.0
[ms]
0
5
10
15
20
25
*10
6
(f ile Sistema2.pl4; x-v ar t) m:DF1 m:DR1
25.0 25.5 26.0 26.5 27.0 27.5
[ms]
0
5
10
15
20
25
*10
6
(f ile Sistema2.pl4; x-v ar t) m:DF1 m:DR1
25.0 25.5 26.0 26.5 27.0 27.5
[ms]
0
5
10
15
20
25
*10
6
d
f
d
r
d
f
d
r
d
f
d
r
d
f
d
r
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 79 -
En la Figura 3.17 se muestra el sistema de prueba 2 simulado en ATP/EMTP.
Figura 3.17. Sistema de prueba 2 simulado en ATP/EMTP.
3.4 COMPORTAMIENTO DE S
1
Y S
2
ANTE DIFERENTES TIPOS DE FALLA Y
TRANSFORMACIONES MODALES.
En la seccin 3.2.3 se coment que para emplear las ecuaciones de onda viajera en sistemas
trifsicos se debe realizar una transformacin modal sobre las seales incrementales,
obtenindose un modo de tierra (modo 0) y dos modos areos (modo 1 y 2). El modo de tierra
no se puede utilizar en la deteccin, discriminacin o localizacin de fallas debido a que slo
se presenta para fallas que involucran tierra (Figuras 3.4 y 3.5). Lo anterior conlleva a
cuestionarse sobre qu modo areo utilizar: modo 1, modo 2 o ambos. A continuacin se
realiza un anlisis sobre el comportamiento de los modos areos 1 y 2 de las matrices de
transformacin de Karrenbauer, Clarke y Wedephol ante diferentes tipos de falla.
3.4.1 Transformacin de Karrenbauer
La Figura 3.18 presenta las seales del relevador S
1
y S
2
y las funciones de discriminacin d
f
y
d
r
para una falla A-G delante de la posicin del relevador, en ella se observa que la falla es
detectada por los dos modos areos de la matriz de transformacin de Karrenbauer.
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 80 -
a) b)
c) d)
Figura 3.18. Falla A-G. a) Funciones S
1
y S
2
modo 1. b) Funciones S
1
y S
2
modo 2.
c) Funciones d
f
y d
r
modo 1. d) Funciones d
f
y d
r
modo 2
El modo 2 de la matriz de transformacin de Karrenbauer est definido por la ecuacin 3.16:
( )
| | | | ( )
c a
c
b
a
v v
v
v
v
v A A =
(
(
(
A
A
A
= A
3
1
1 0 1
3
1
2
(3.16)
( )
| | | | ( )
c a
c
b
a
i i
i
i
i
i A A =
(
(
(
A
A
A
= A
3
1
1 0 1
3
1
2
Analizando la ecuacin anterior se puede concluir que al realizar la transformacin modal
sobre las seales incrementales de voltajes y corrientes, la seal incremental de la fase B no
tiene aportacin al formar el modo 2 de la matriz de Karrenbauer. La Figura 3.19 hace un
(f ile Sistema1.pl4; x-v ar t) m:DFA m:DRA
20 24 28 32 36 40 [ms]
-800
-600
-400
-200
0
200
400
600
800
*10
3
(f ile Sistema1.pl4; x-v ar t) m:DFB m:DRB
20 24 28 32 36 40 [ms]
-800
-600
-400
-200
0
200
400
600
800
*10
3
(f ile Sistema1.pl4; x-v ar t) m:DF1 m:DR1 m:NF
24.0 24.5 25.0 25.5 26.0 26.5 27.0 27.5 28.0
[ms]
0
5
10
15
20
25
30
35
*10
6
(f ile Sistema1.pl4; x-v ar t) m:DF2 m:DR2 m:NF
24.0 24.5 25.0 25.5 26.0 26.5 27.0 27.5 28.0
[ms]
0
5
10
15
20
25
30
35
*10
6
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 81 -
comparativo de la respuesta de las seales S
1
, S
2
,
d
f
y d
r
para los modos areos 1 y 2 de la
matriz de transformacin de Karrenbauer para una falla B-G. En la Figura 3.19b se observa
que la falla B-G no es detectada por el modo 2 y bsicamente lo que aparece en la grafica es
una condicin normal de estado estable. La Figura 3.19d muestra que las funciones de
discriminacin d
f
y d
r
obtenidas por modo areo 2 son de magnitud cero y nunca rebasan el
nivel de falla.
a) b)
c) d)
Figura 3.19. Falla B-G. a) Funciones S
1
y S
2
modo 1. b) Funciones S
1
y S
2
modo 2.
c) Funciones d
f
y d
r
modo 1. d) Funciones d
f
y d
r
modo 2
El modo 1 de la matriz de transformacin de Karrenbauer es el siguiente:
( )
| | | | ( )
b a
c
b
a
v v
v
v
v
v A A =
(
(
(
A
A
A
= A
3
1
0 1 1
3
1
1
(3.17)
(f ile Sistema1.pl4; x-v ar t) m:DFA m:DRA
15 20 25 30 35 40 [ms]
-1,2
-0,8
-0,4
0,0
0,4
0,8
1,2
*10
6
(f ile Sistema1.pl4; x-v ar t) m:DFB m:DRB
10 15 20 25 30 35 40
[ms]
-800
-600
-400
-200
0
200
400
600
800
(f ile Sistema1.pl4; x-v ar t) m:DF1 m:DR1 m:NF
19.0 19.5 20.0 20.5 21.0 21.5 22.0 22.5
[ms]
0
5
10
15
20
25
*10
6
(f ile Sistema1.pl4; x-v ar t) m:NF m:DF2 m:DR2
19.0 19.5 20.0 20.5 21.0 21.5 22.0 22.5
[ms]
0
5
10
15
20
25
*10
6
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 82 -
( )
| | | | ( )
b a
c
b
a
i i
i
i
i
i A A =
(
(
(
A
A
A
= A
3
1
0 1 1
3
1
1
En la ecuacin 3.17 se observa que las seales incrementales
( ) 1
v A y
( ) 1
i A se forman por las
contribuciones de las seales incrementales de las fases A y B. En la Figura 3.20a y 3.20c se
observa que la falla C-G no es detectada por el modo areo 1 de la transformacin de
Karrenbauer.
a) b)
c) d)
Figura 3.20. Falla C-G. a) Funciones S
1
y S
2
modo 1. b) Funciones S
1
y S
2
modo 2.
c) Funciones d
f
y d
r
modo 1. d) Funciones d
f
y d
r
modo 2
(f ile Sistema1.pl4; x-v ar t) m:DFA m:DRA
0 5 10 15 20 25 30 35 40
[ms]
-2000
-1500
-1000
-500
0
500
1000
(f ile Sistema1.pl4; x-v ar t) m:DFB m:DRB
15 20 25 30 35 40 [ms]
-900
-600
-300
0
300
600
900
*10
3
(f ile Sistema1.pl4; x-v ar t) m:DF1 m:DR1 m:NF
24.0 24.5 25.0 25.5 26.0 26.5 27.0
[ms]
0
4
8
12
16
20
*10
6
(f ile Sistema1.pl4; x-v ar t) m:NF m:DF2 m:DR2
24.0 24.5 25.0 25.5 26.0 26.5 27.0
[ms]
0
4
8
12
16
20
*10
6
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 83 -
3.4.2 Transformacin de Clarke
La Figura 3.21 muestra las seales S
1
y S
2
y las funciones de discriminacin d
f
y d
r
para los
modos 1 y 2 de la matriz de transformacin de Clarke. En esta figura se observa que ambos
modos areos detectan la presencia una falla B-G.
a) b)
c) d)
Figura 3.21. Falla B-G. a) Funciones S
1
y S
2
modo 1. b) Funciones S
1
y S
2
modo 2.
c) Funciones d
f
y d
r
modo 1. d) Funciones d
f
y d
r
modo 2
Al analizar la respuesta del modo 1 de la matriz de transformacin de Clarke ante los
diferentes tipos de fallas se encontr que las fallas de tipo BC no son detectadas.
La Ecuacin 3.18 representa el modo 1 de la matriz de transformacin de Clarke:
(f ile Sistema1.pl4; x-v ar t) m:DFA m:DRA
15 20 25 30 35 40 [ms]
-1,2
-0,8
-0,4
0,0
0,4
0,8
1,2
*10
6
(f ile Sistema1.pl4; x-v ar t) m:DFB m:DRB
15 20 25 30 35 40 [ms]
-700
-525
-350
-175
0
175
350
525
700
*10
3
(f ile Sistema1.pl4; x-v ar t) m:DF1 m:DR1 m:NF
19.0 19.5 20.0 20.5 21.0 21.5 22.0
[ms]
0
5
10
15
20
25
*10
6
(f ile Sistema1.pl4; x-v ar t) m:DF2 m:DR2 m:NF
19.0 19.5 20.0 20.5 21.0 21.5 22.0
[ms]
0
3
6
9
12
15
*10
6
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 84 -
( )
| | | | ( )
c b a
c
b
a
v v v
v
v
v
v A A A =
(
(
(
A
A
A
= A 2
3
1
1 1 2
3
1
1
(3.18)
( )
| | | | ( )
c b a
c
b
a
i i i
i
i
i
i A A A =
(
(
(
A
A
A
= A 2
3
1
1 1 2
3
1
1
La Figura 3.22 muestra el comportamiento del modo 1 y 2 de la matriz de transformacin de
Clarke para fallas de tipo BC.
a) b)
c) d)
Figura 3.22. Falla BC. a) Funciones S
1
y S
2
modo 1. b) Funciones S
1
y S
2
modo 2.
c) Funciones d
f
y d
r
modo 1. d) Funciones d
f
y d
r
modo 2
(f ile Sistema1.pl4; x-v ar t) m:DFA m:DRA
0 5 10 15 20 25 30 35 40
[ms]
-2000
-1500
-1000
-500
0
500
1000
1500
2000
(f ile Sistema1.pl4; x-v ar t) m:DFB m:DRB
15 20 25 30 35 40
[ms]
-2,0
-1,5
-1,0
-0,5
0,0
0,5
1,0
1,5
2,0
*10
6
(f ile Sistema1.pl4; x-v ar t) m:NF m:DF1 m:DR1
21.0 21.5 22.0 22.5 23.0 23.5 24.0
[ms]
0
5
10
15
20
25
30
*10
6
(f ile Sistema1.pl4; x-v ar t) m:DF2 m:DR2 m:NF
21.0 21.5 22.0 22.5 23.0 23.5 24.0
[ms]
0
5
10
15
20
25
30
35
40
*10
6
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 85 -
La Ecuacin 3.19 representa en modo 2 de la matriz de transformacin de Clarke.
( )
| | |
.
|
\
|
A A =
(
(
(
A
A
A
= A
c b
c
b
a
v v
v
v
v
v
3
1
3
1
3
1
3
1
3
1
0
3
1
2
(3.19)
( )
| |
|
.
|
\
|
A A =
(
(
(
A
A
A
= A
c b
c
b
a
i i
i
i
i
i
3
1
3
1
3
1
3
1
3
1
0
3
1
2
La Figura 3.23 muestra el comportamiento del modo areo 1 y 2 de la matriz de
transformacin de Clarke para una falla A-G. En la Figura 3.23b se observa que el modo areo
2 de esta matriz de transformacin modal no detecta fallas de tipo A-G.
a) b)
c) d)
Figura 3.23. Falla A-G. a) Funciones S
1
y S
2
modo 1. b) Funciones S
1
y S
2
modo 2.
c) Funciones d
f
y d
r
modo 1. d) Funciones d
f
y d
r
modo 2
(f ile Sistema1.pl4; x-v ar t) m:DFA m:DRA
20 24 28 32 36 40 [ms]
-1,6
-1,2
-0,8
-0,4
0,0
0,4
0,8
1,2
1,6
*10
6
(f ile Sistema1.pl4; x-v ar t) m:DFB m:DRB
10 15 20 25 30 35 40
[ms]
-1200
-900
-600
-300
0
300
600
(f ile Sistema1.pl4; x-v ar t) m:DF1 m:DR1 m:NF
24.0 24.5 25.0 25.5 26.0 26.5 27.0 27.5 28.0
[ms]
0
10
20
30
40
50
60
70
*10
6
(f ile Sistema1.pl4; x-v ar t) m:DF2 m:DR2 m:NF
24.0 24.5 25.0 25.5 26.0 26.5 27.0 27.5 28.0
[ms]
0
2
4
6
8
10
*10
6
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 86 -
3.4.3 Transformacin de Wedephol
La Figura 3.24 muestra las funciones S
1
y S
2
y las funciones de discriminacin d
f
y d
r
para los
modos 1 y 2 de la matriz de transformacin de Wedepohl para una falla de tipo A-G.
Obsrvese que ambos modos detectan la presencia de falla.
a) b)
c) d)
Figura 3.24. Falla A-G. a) Funciones S
1
y S
2
modo 1. b) Funciones S
1
y S
2
modo 2.
c) Funciones d
f
y d
r
modo 1. d) Funciones d
f
y d
r
modo 2
La Ecuacin 3.20 representa el modo 1 de la matriz de transformacin de Wedepohl. Al
analizar esta ecuacin podemos deducir que este modo tiene problemas para detectar fallas de
tipo B-G, debido al cero que aparece en la posicin de la componente incremental de la fase B.
( )
| |
|
.
|
\
|
A A =
(
(
(
A
A
A
= A
c a
c
b
a
v v
v
v
v
v
2
3
2
3
3
1
2
3
0
2
3
3
1
1
(f ile Sistema1.pl4; x-v ar t) m:DFA m:DRA
20 24 28 32 36 40 [ms]
-1,2
-0,8
-0,4
0,0
0,4
0,8
1,2
*10
6
(f ile Sistema1.pl4; x-v ar t) m:DFB m:DRB
20 24 28 32 36 40 [ms]
-400
-300
-200
-100
0
100
200
300
400
*10
3
(f ile Sistema1.pl4; x-v ar t) m:DF1 m:DR1 m:NF
24.0 24.5 25.0 25.5 26.0 26.5 27.0 27.5 28.0
[ms]
0
10
20
30
40
50
*10
6
(f ile Sistema1.pl4; x-v ar t) m:DF2 m:DR2 m:NF
24.0 24.5 25.0 25.5 26.0 26.5 27.0 27.5 28.0
[ms]
0
4
8
12
16
20
*10
6
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 87 -
(3.20)
( )
| |
|
.
|
\
|
A A =
(
(
(
A
A
A
= A
c a
c
b
a
i i
i
i
i
i
2
3
2
3
3
1
2
3
0
2
3
3
1
1
Las Figuras 3.25a y 3.25b muestran el comportamiento de las funciones S
1
y S
2
del modo
areo 1 y 2 respectivamente, de la transformacin de Wedephol para fallas de tipo B-G.
a) b)
c) d)
Figura 3.25. Falla B-G. a) Funciones S
1
y S
2
modo 1. b) Funciones S
1
y S
2
modo 2.
c) Funciones d
f
y d
r
modo 1. d) Funciones d
f
y d
r
modo 2
En las Figuras 3.25a y 3.25c se observa que el modo 1 de la transformacin de Wedephol no
detecta fallas de tipo B-G.
La ecuacin 3.21 representa el modo 2 de la matriz de transformacin de Wedepohl.
(f ile Sistema1.pl4; x-v ar t) m:DFA m:DRA
10 15 20 25 30 35 40
[ms]
-1200
-800
-400
0
400
800
1200
(f ile Sistema1.pl4; x-v ar t) m:DFB m:DRB
20 24 28 32 36 40 [ms]
-800
-600
-400
-200
0
200
400
600
800
*10
3
(f ile Sistema1.pl4; x-v ar t) m:DF1 m:DR1 m:NF
19.0 19.5 20.0 20.5 21.0 21.5 22.0 22.5 23.0
[ms]
0
4
8
12
16
20
*10
6
(f ile Sistema1.pl4; x-v ar t) m:DF2 m:DR2 m:NF
19.0 19.5 20.0 20.5 21.0 21.5 22.0
[ms]
0
5
10
15
20
25
*10
6
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 88 -
( )
| |
|
.
|
\
|
A + A A =
(
(
(
A
A
A
= A
c b a
c
b
a
v v v
v
v
v
v
2
1
2
1
3
1
2
1
1
2
1
3
1
2
(3.21)
( )
| |
|
.
|
\
|
A + A A =
(
(
(
A
A
A
= A
c b a
c
b
a
i i i
i
i
i
i
2
1
2
1
3
1
2
1
1
2
1
3
1
2
Las Figuras 3.26b y 3.26d muestra el comportamiento del modo areo 2 de la transformacin
de Wedephol ante fallas de tipo BC.
a) b)
c) d)
Figura 3.26. Falla AC. a) Funciones S
1
y S
2
modo 1. b) Funciones S
1
y S
2
modo 2.
c) Funciones d
f
y d
r
modo 1. d) Funciones d
f
y d
r
modo 2
(f ile Sistema1.pl4; x-v ar t) m:DFA m:DRA
20 24 28 32 36 40 [ms]
-5.00
-3.75
-2.50
-1.25
0.00
1.25
2.50
3.75
5.00
*10
6
(f ile Sistema1.pl4; x-v ar t) m:DFB m:DRB
10 15 20 25 30 35 40
[ms]
-700
-525
-350
-175
0
175
350
525
700
(f ile Sistema1.pl4; x-v ar t) m:DF1 m:DR1 m:NF
24.0 24.5 25.0 25.5 26.0 26.5 27.0 27.5 28.0
[ms]
0
15
30
45
60
75
90
*10
6
(f ile Sistema1.pl4; x-v ar t) m:DF2 m:DR2 m:NF
24.0 24.5 25.0 25.5 26.0 26.5 27.0 27.5 28.0
[ms]
0
2
4
6
8
10
*10
6
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 89 -
Los resultados obtenidos permiten concluir que cuando la matriz de transformacin tiene
valores iguales en el mismo modo de propagacin (0, 1 o 2), se tienen problemas para
identificar fallas en las fases involucradas con estos valores. Un ejemplo es la transformacin
modal de Clarke en la que se observa que para el modo 1 (Ecuacin. 3.18), la magnitud
asociada a las fases B y C es de (-1) para ambos casos. En la Figura 3.21a se observan los
problemas asociados con este modo para fallas AB. Por otra parte, en la ecuacin 3.21 se
observa que en el modo 2 de la transformacin modal de Wedephol la magnitud asociada a
las fases A y C es igual para ambos casos (1/2). En la Figura 3.25b se observan los problemas
asociados al modo 2 de Wedephol para una falla AC.
La Tabla 3.1 muestra el comportamiento de los modos areos y de tierra de las distintas
matrices de transformacin ante diferentes tipos de falla.
Tabla 3.1. Resultados de los modos de tierra y areos ante diferentes fallas.
TIPO DE TRANSFORMACION MODAL
FALLA [0] K1 K2 C1 C2 W1 W2
A-G 1 0 1 1 1 1 1
B-G 1 1 0 1 1 0 1
C-G 1 1 1 1 0 1 1
AB-G 1 1 1 1 1 1 1
AC-G 1 1 1 1 1 1 1
BC-G 1 1 1 1 1 1 1
AB 0 1 1 1 1 1 1
AC 0 1 1 1 1 1 0
BC 0 1 1 0 1 1 1
ABC 0 1 1 1 1 1 1
ABC-G 0 1 1 1 1 1 1
1 El modo en cuestin detect falla.
0 El modo en cuestin no detect falla.
K1 Transformacin de Karrenbauer modo 1
K2 Transformacin de Karrenbauer modo 2
Captulo 3. Deteccin y discriminacin direccional de la falla.
P.G.I .I .E
- 90 -
C1 Transformacin de Clarke modo 1
C2 Transformacin de Clarke modo 2
W2 Transformacin de Wedepohl modo 2
3.5 CONCLUSIONES DEL CAPTULO.
En este captulo se present un breve recorrido histrico de los esquemas de proteccin de
lneas de transmisin: sobrecorriente, diferencial y de distancia hasta llegar al principio de
proteccin mediante ondas viajeras.
Ms adelante se definieron las seales incrementales, la transformacin modal de las mismas y
la incorporacin de estas a las ecuaciones de onda viajera. Tambin, se definieron las
funciones de discriminacin de Michels, las cuales son independientes del ngulo de insercin
de la falla.
Con las funciones de discriminacin de Michels se describen los mtodos de deteccin y
discriminacin direccional de la falla. Las pruebas realizadas a ambos mtodos comprueban la
confiabilidad de los mismos. Al analizar los modos de tierra y areos de las distintas matrices
de transformacin se determin que no es posible utilizar el modo de tierra [0] en la deteccin
o discriminacin debido a que este modo solo aparece en fallas que involucran tierra, excepto
en fallas trifsicas ABC-G. Posteriormente, se realizaron una serie de pruebas para determinar
el comportamiento de las funciones de discriminacin empleando los modos areos 1 y 2 ante
diferentes tipos de falla. Los resultados obtenidos por estas pruebas demuestran que se deben
utilizar los dos modos areos de propagacin para hacer la deteccin, discriminacin
direccional, clasificacin y localizacin de fallas en lneas de transmisin, ya que ninguno de
los modos por s mismo (de las distintas matrices de transformacin) es capaz de detectar el
100% de los diferentes tipos de fallas.
P.G.I .I .E
- 91 -
CAPTULO 4
CLASI FI CACI N DE LA FALLA.
4.1 INTRODUCCIN.
En el Captulo 3 se realiz un anlisis del comportamiento de las matrices de transformacin
modal ante diferentes tipos de fallas. Como resultado de este anlisis se encontraron
diferentes caractersticas que se pueden utilizar para hacer la clasificacin final del tipo de
falla:
1. Utilizando las propiedades del modo 0 de tierra, es posible realizar una clasificacin
preliminar de las fallas en tres diferentes grupos:
Las Figuras 4.1 a 4.11 muestran el comportamiento de las seales S
1
(0)
, S
2
(0)
, d
f
(0)
y d
r
(0)
para
los diferentes tipos de falla.
Figura 4.1 Modo [0] Falla A-G. a) Seales S
1
y S
2
b) Seales d
f
y d
r
(f ile Sistema1.pl4; x-v ar t) m:S10 m:S20
20 23 26 29 32 35 [ms]
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
*10
6
(f ile Sistema1.pl4; x-v ar t) m:DF0 m:DR0
21.5 22.0 22.5 23.0 23.5 24.0 [ms]
0
1
2
3
4
5
6
7
8
*10
6
Captulo 4. Clasificacin de la falla.
P.G.I .I .E
- 92 -
Figura 4.2 Modo [0] Falla B-G. a) Seales S
1
y S
2
b) Seales d
f
y d
r
Figura 4.3 Modo [0] Falla C-G. a) Seales S
1
y S
2
b) Seales d
f
y d
r
Figura 4.4 Modo [0] Falla AB-G. a) Seales S
1
y S
2
b) Seales d
f
y d
r
(f ile Sistema1.pl4; x-v ar t) m:S10 m:S20
20 23 26 29 32 35 [ms]
-800
-600
-400
-200
0
200
400
600
800
*10
3
(f ile Sistema1.pl4; x-v ar t) m:DF0 m:DR0
21.5 22.0 22.5 23.0 23.5 24.0
[ms]
0
4
8
12
16
20
*10
6
(f ile Sistema1.pl4; x-v ar t) m:S10 m:S20
20 23 26 29 32 35 [ms]
-1.2
-0.8
-0.4
0.0
0.4
0.8
1.2
*10
6
(f ile Sistema1.pl4; x-v ar t) m:DF0 m:DR0
21.5 22.0 22.5 23.0 23.5 24.0 [ms]
0
2
4
6
8
10
*10
6
(f ile Sistema1.pl4; x-v ar t) m:S10 m:S20
20 23 26 29 32 35 [ms]
-900
-600
-300
0
300
600
900
*10
3
(f ile Sistema1.pl4; x-v ar t) m:DF0 m:DR0
21.5 22.0 22.5 23.0 23.5 24.0 [ms]
0
1
2
3
4
5
6
7
8
*10
6
Captulo 4. Clasificacin de la falla.
P.G.I .I .E
- 93 -
Figura 4.5 Modo [0] Falla AC-G. a) Seales S
1
y S
2
b) Seales d
f
y d
r
Figura 4.6 Modo [0] Falla BC-G. a) Seales S
1
y S
2
b) Seales d
f
y d
r
Figura 4.7 Modo [0] Falla AB. a) Seales S
1
y S
2
b) Seales d
f
y d
r
(f ile Sistema1.pl4; x-v ar t) m:S10 m:S20
20 23 26 29 32 35 [ms]
-600
-400
-200
0
200
400
600
*10
3
(f ile Sistema1.pl4; x-v ar t) m:DF0 m:DR0
21.5 22.0 22.5 23.0 23.5 24.0 [ms]
0
3
6
9
12
15
*10
6
(f ile Sistema1.pl4; x-v ar t) m:S10 m:S20
20 23 26 29 32 35 [ms]
-900
-600
-300
0
300
600
900
*10
3
(f ile Sistema1.pl4; x-v ar t) m:DF0 m:DR0
21.5 22.0 22.5 23.0 23.5 24.0 [ms]
0
1
2
3
4
5
6
7
*10
6
(f ile Sistema1.pl4; x-v ar t) m:S10 m:S20
20 23 26 29 32 35 [ms]
-0.15
-0.10
-0.05
0.00
0.05
0.10
0.15
(f ile Sistema1.pl4; x-v ar t) m:DF0 m:DR0
21.5 22.0 22.5 23.0 23.5 24.0 [ms]
0.0
1.5
3.0
4.5
6.0
7.5
9.0
Captulo 4. Clasificacin de la falla.
P.G.I .I .E
- 94 -
Figura 4.8 Modo [0] Falla AC. a) Seales S
1
y S
2
b) Seales d
f
y d
r
Figura 4.9 Modo [0] Falla BC. a) Seales S
1
y S
2
b) Seales d
f
y d
r
Figura 4.10 Modo [0] Falla ABC. a) Seales S
1
y S
2
b) Seales d
f
y d
r
(f ile Sistema1.pl4; x-v ar t) m:S10 m:S20
20 23 26 29 32 35 [ms]
-0.20
-0.15
-0.10
-0.05
0.00
0.05
0.10
0.15
0.20
(f ile Sistema1.pl4; x-v ar t) m:DF0 m:DR0
21.5 22.0 22.5 23.0 23.5 24.0 [ms]
0
2
4
6
8
10
12
14
16
(f ile Sistema1.pl4; x-v ar t) m:S10 m:S20
20 23 26 29 32 35 [ms]
-0.15
-0.10
-0.05
0.00
0.05
0.10
0.15
(f ile Sistema1.pl4; x-v ar t) m:DF0 m:DR0
21.5 22.0 22.5 23.0 23.5 24.0 [ms]
0
1
2
3
4
5
6
7
(f ile Sistema1.pl4; x-v ar t) m:S10 m:S20
20 22 24 26 28 30 32 34 36
[ms]
-2
-1
0
1
2
3
4
*10
-9
(f ile Sistema1.pl4; x-v ar t) m:DF0 m:DR0
21.5 22.0 22.5 23.0 23.5 24.0
[ms]
0.00
0.04
0.08
0.12
0.16
0.20
*10
-6
Captulo 4. Clasificacin de la falla.
P.G.I .I .E
- 95 -
Figura 4.11 Modo [0] Falla ABC-G. a) Seales S
1
y S
2
b) Seales d
f
y d
r
Para fallas A-G, B-G, C-G, AB-G, AC-G y BC-G la magnitud de las seales S
1
, S
2
, d
f
y d
r
es
grande (10
6
), ver Figuras 4.1 a 4.6. En las Figuras 4.7 a 4.9 puede observarse que para fallas
bifsicas que no involucran tierra las magnitudes de las seales S
1
, S
2
, d
f
y d
r
son muy
pequeas (10
1
). Por ltimo, las Figuras 4.10 y 4.11 muestran que para fallas de tipo ABC y
ABC-G las seales S
1
, S
2
, d
f
y d
r
son prcticamente cero (10
-6
).
La Tabla 4.1 muestra el resumen de los comportamientos de las seales d
f
(0)
y d
r
(0)
para
distintos tipos de fallas. A travs del estudio realizado se puede hacer una clasificacin de tres
diferentes grupos de fallas.
Tabla 4.1 Comportamiento de las seales d
f
(0)
y d
r
(0)
.
GRUPO FALLA MAGNITUD d
f
y d
r
A-G
B-G
1 C-G * 10
6
AB-G
AC-G
BC-G
AB
2 AC * 10
BC
3 ABC * 10
-6
ABC-G
(f ile Sistema1.pl4; x-v ar t) m:S10 m:S20
20 23 26 29 32 35 [ms]
-2
-1
0
1
2
3
4
*10
-9
(f ile Sistema1.pl4; x-v ar t) m:DF0 m:DR0
21.5 22.0 22.5 23.0 23.5 24.0 [ms]
0.00
0.04
0.08
0.12
0.16
0.20
*10
-6
Captulo 4. Clasificacin de la falla.
P.G.I .I .E
- 96 -
2. Combinando la capacidad de los modos areos y de tierra es posible identificar las
fallas de fase a tierra y fallas entre fases.
En la Seccin 3.4 se mostr que la matriz de transformacin de Karrenbauer (modo areo 1)
no detecta fallas A-G, el modo areo 2 no detecta fallas B-G y la matriz de transformacin de
Clarke (modo areo 2) no detecta fallas C-G. Si se detecta una falla del grupo 1, entonces al
conocer los comportamientos de las matrices de transformacin de Karrenbauer (modo areo 1
y 2) y Clarke (modo areo 2) se puede determinar si la falla fue A-G, B-G y/o C-G,
identificando cul de estos modos no detect falla. Por otro lado, la matriz de transformacin
de Clarke (modo areo 1) no detecta las fallas BC y la matriz de transformacin de Wedepohl
(modo areo 2) no detecta las fallas AC. As, por tanto si identificamos que se trata de una
falla del grupo 2 y es detectada por el modo 1 de Clarke y por el modo 2 de Wedepohl
entonces la falla es AB.
La Tabla 4.2 muestra el comportamiento de los modos de tierra y areos de las distintas
matrices de transformacin para diferentes tipos de fallas.
Tabla 4.2 Comportamiento de los modos areas y de tierra antes distintos tipos de falla.
TIPO DE TRANSFORMACION MODAL
FALLA [0] K1 K2 C1 C2 W1 W2
A-G 1 0 1 1 1 1 1
B-G 1 1 0 1 1 0 1
C-G 1 1 1 1 0 1 1
AB-G 1 1 1 1 1 1 1
AC-G 1 1 1 1 1 1 1
BC-G 1 1 1 1 1 1 1
AB 0 1 1 1 1 1 1
AC 0 1 1 1 1 1 0
BC 0 1 1 0 1 1 1
ABC 0 1 1 1 1 1 1
ABC-G 0 1 1 1 1 1 1
Captulo 4. Clasificacin de la falla.
P.G.I .I .E
- 97 -
3. Las fallas de dos fases a tierra se identifican utilizando el mtodo de ndices modales
basado en la matriz de componentes simtricas y la de Karrenbauer.
Este mtodo utiliza informacin de un anlisis de componentes simtricas y la matriz de
transformacin de Karrenbauer. El mtodo se basa en hacer un comparativo de las corrientes
de fase con las corrientes modales, ver Tabla 4.3. Cabe resaltar, que todos los tipos de fallas se
pueden clasificar de esta manera, dado que nunca se repite un orden de ndices. Esto solo
ocurre para la matriz de Karrenbauer.
Tabla 4.3 Caractersticas de las fallas en ndices modales.
TIPO MODO 0 MODO 1 MODO 2
DE FALLA I
0
I
A-G Ia Ia Ia
B-G Ib -Ib 0
C-G Ic 0 -Ic
AB-G Ia+Ib Ia-Ib Ia
AC-G Ia+Ic Ia Ia-Ic
BC-G Ib+Ic -Ib -Ic
AB 0 2Ia Ia
AC 0 Ic 2Ib
BC 0 -Ib Ic
ABC 0 Ia-Ib Ia-Ic
Por ejemplo, si la falla es del grupo 1 y se sabe que no se trata de una falla A-G o B-G o C-
G (utilizando Karrenbauer modo 1 y 2 y Clarke modo 2), entonces se concluye que la falla es
bifsica a tierra. Sin embargo, las fallas de tipo AB-G, AC-G y BC-G no pueden clasificarse
utilizando los modos 0, 1 y 2 de las distintas matrices de transformacin modal. Para hacer la
clasificacin de este tipo de fallas se utiliza I
0
de la Tabla 4.3.
Para ilustrar lo anterior, la Figura 4.12 muestra el comportamiento de las seales
Z1=(Ia+Ib)/3, Z2=(Ia+Ic)/3, Z3=(Ib+Ic)/3 y la componente de modo 0 de la componentes
simtricas (I
0
=( Ia+Ib+Ic) /3) para fallas de tipo AB-G, AC-G y BC-G. La Figura 4.12a
muestra que, para una falla AB-G, I
0
es igual a Z1. En la Figura 4.12b se observa una falla
Captulo 4. Clasificacin de la falla.
P.G.I .I .E
- 98 -
AC-G en la que I
0
=Z2 y por ltimo la Figura 4.12c muestra una falla BC-G en la que I
0
=Z3,
tal como lo indica la Tabla 4.3, con lo cual se valida el algoritmo propuesto.
a) b)
c)
Figura 4.12. Seales Z1=(Ia+Ib)/3, Z2=(Ia+Ic)/3, Z3=(Ib+Ic)/3 e I
0
a) Falla AB-G b) Falla AC-G c) Falla BC-G
Utilizando las caractersticas antes mencionadas se puede desarrollar un algoritmo que realice
una clasificacin del tipo de falla. La Tabla 4.4 muestra la lgica de operacin del algoritmo,
donde inclusive algunos modos pueden funcionar como verificadores.
Las fallas del grupo 3 de la Tabla 4.4 no pueden ser separadas en fallas ABC o ABC-G. Es
por ello que el algoritmo de clasificacin slo informar que se trata de una falla trifsica.
(f ile Tf alla.pl4; x-v ar t) m:Z1 m:Z2 m:Z3 m:DI0
21 23 25 27 29 31 [ms]
-4000
-3000
-2000
-1000
0
1000
2000
3000
(f ile Tf alla.pl4; x-v ar t) m:Z1 m:Z2 m:Z3 m:DI0
21 23 25 27 29 31 [ms]
-4000
-3000
-2000
-1000
0
1000
2000
3000
(f ile Tf alla.pl4; x-v ar t) m:Z1 m:Z2 m:Z3 m:DI0
21 23 25 27 29 31 [ms]
-2000
-1000
0
1000
2000
3000
Z1
Z2
Z3
I0
Z1
Z2
I0
Z3
Z3
Z2
Z1
I0
Captulo 4. Clasificacin de la falla.
P.G.I .I .E
- 99 -
Tabla 4.4 Lgica de operacin del algoritmo clasificador de fallas.
* No se toma en cuenta ese resultado.
1 El modo en cuestin detect falla.
0 El modo en cuestin no detect falla.
K1 Transformacin de Karrenbauer modo 1
K2 Transformacin de Karrenbauer modo 2
C1 Transformacin de Clarke modo 1
C2 Transformacin de Clarke modo 2
W2 Transformacin de Wedepohl modo 2
4.2 ALGORITMO DE CLASIFICACIN DE FALLAS.
El algoritmo de clasificacin de fallas se puede resumir en los siguientes pasos:
1. Se obtienen las seales incrementales de corriente dIa, dIb y dIc.
2. Se obtiene dI
0
= (dIa+dIb+dIc)/3.
Modo 0 TIPO DE TRANSFORMACION MODAL Modo 0
TIPO FALLA K1 K2 C2 C1 W2 I
0
A-G 0 1 1 * * *
B-G 1 0 1 * * *
1 C-G 1 1 0 * * *
AB-G 1 1 1 * * (Ia+Ib)/3
AC-G 1 1 1 * * (Ia+Ic)/3
BC-G 1 1 1 * * (Ib+Ic)/3
AB * * * 1 1 *
2 AC * * * 1 0 *
BC * * * 0 1 *
3 ABC * * * * * *
ABC-G * * * * * *
Captulo 4. Clasificacin de la falla.
P.G.I .I .E
- 100 -
3. Se obtiene d
f
(0)
y d
r
(0)
.
4. Se examina la magnitud de d
f
(0)
y d
r
(0)
.
5. Si d
f
(0)
o d
r
(0)
es del orden de 1x10
6
entonces:
Se obtienen los modos areos 1 y 2 de la matriz de Karrenbauer (K1 y K2) y el modo
areo 2 de la matriz de Clarke (C2).
Si K1=0, K2=1 y C2=1 entonces la falla es A-G.
Si K1=1, K2=0 y C2=1 entonces la falla es B-G.
Si K1=1, K2=1 y C2=0 entonces la falla es C-G.
Si K1=1, K2=1 y C2=1 entonces se obtiene Z1, Z2 y Z3:
Si Z1=(Ia+Ib)/3=dI
0
entonces la falla es AB-G.
Si Z2=(Ia+Ic)/3 =dI
0
entonces la falla es AC-G.
Si Z3=(Ib+Ic)/3=dI
0
entonces la falla es BC-G.
6. Si d
f
(0)
o d
r
(0)
es del orden de 1x10 entonces:
Se obtiene el modo areo 1 de la matriz de Clarke (C1) y el modo areo 2 de la matriz
de Whedepohl (W2).
Si C1=1 y W2=1 entonces la falla es AB.
Si C1=1 y W2=0 entonces la falla es AC.
Si C1=0 y W2=1 entonces la falla es BC.
7. Si d
f
(0)
0 d
r
(0)
es del orden de 1x10
-6
entonces la falla es ABC o ABC-G.
Captulo 4. Clasificacin de la falla.
P.G.I .I .E
- 101 -
4.3 RESULTADOS DEL ALGORITMO DE CLASIFICACIN DE FALLAS.
La Figura 4.13 muestra el sistema de potencia utilizado para analizar la confiabilidad del
algoritmo de clasificacin de fallas.
Figura 4.13 Sistema de prueba utilizado en la simulacin.
Una vez que la falla es clasificada, el resultado se muestra travs de un valor numrico
mediante la variable TF, descrita en la Tabla 4.5.
La Tabla 4.6 resume los resultados obtenidos al simular distintos tipos de fallas a diferentes
distancias de la lnea de transmisin 1 del sistema de potencia de la Figura 4.13.
Tabla 4.5 Clasificacin de los resultados en ATP/EMTP
TIPO DE VARIABLE
FALLA TF
A-G 1
B-G 2
C-G 3
AB-G 4
AC-G 5
BC-G 6
AB 7
AC 8
BC 9
ABC 10
ABC-G 10
Captulo 4. Clasificacin de la falla.
P.G.I .I .E
- 102 -
Tabla 4.6 Resultados del algoritmo de clasificacin de fallas.
Hubo una clasificacin exitosa.
X El algoritmo fall en la clasificacin de la falla.
4.4 CONCLUSIONES.
Los resultados obtenidos por las simulaciones en ATP/EMTP muestran que el algoritmo
clasific correctamente el 100% de las fallas simuladas, independientemente del ngulo de
insercin y de la impedancia de la misma.
El algoritmo desarrollado tiene ventajas al mostrado en la Tabla 4.3, debido a que la cantidad
de comparaciones que se hace es menor. Por otra lado, cabe aclarar que para que el mtodo de
ndices modales, Tabla 4.3, funcione adecuadamente, las comparaciones de las cantidades de
fase y las modales debe hacerse a travs de un mtodo que compare ventanas de datos, por
ejemplo el mtodo de la distancia de Manhattan que analiza el grado de similitud que existe
entre dos vectores (Captulo 5), ya que al comparar slo una muestra de las cantidades
modales con las de fase pueden presentarse errores en la clasificacin de la falla.
P.G.I .I .E
- 103 -
CAPTULO 5
LOCALI ZACI N DE FALLAS MEDI ANTE
ALGORI TMOS DE ONDA VI AJ ERA.
5.1 INTRODUCCIN.
A continuacin se da una breve descripcin de los mtodos de localizacin de fallas en lneas
de transmisin basados en Ondas Viajeras ms relevantes desarrollados a la fecha.
Filtro de Secuencias. Es bsicamente un filtro pasabanda sincronizado a una
frecuencia de 1 Mhz que utiliza algunas caractersticas especiales de la respuesta
obtenida al procesar las seales de voltaje y corriente para determinar la direccin de
la falla y la distancia a la misma [48].
Localizador tipo D con sincronizacin va GPS. Es un esquema de proteccin de dos
terminales que utiliza un Sistema de Posicionamiento Global (GPS) para sincronizar
los relojes internos de los relevadores R
1
y R
2
colocados en los extremos de una lnea
de transmisin. Una vez que sucede una falla las ondas viajeras se propagan desde el
punto de falla hacia ambos relevadores. El relevador R
1
detecta la falla en un tiempo
T
1
, mientras que el relevador R
2
detecta la falla en un tiempo T
2
. Conociendo T
1
y T
2
y
la velocidad de propagacin de las ondas viajeras es posible determinar la ubicacin de
la falla utilizando la relacin
t
v
d = [57].
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 104 -
Posteriormente se analiza una variante de este esquema de proteccin que funciona
bajo el mismo principio, pero que utiliza nicamente las muestras de corriente para
hacer la discriminacin de falla interna o externa y determinar la distancia a la falla.
Correlacin Estndar. Utiliza un algoritmo de correlacin cruzada de las seales S
1
y
S
2
. La correlacin cruzada nos indica el grado de similitud que existe entre dos
seales, obtenindose una correlacin mxima cuando mas semejantes son stas
seales. Cuando una falla es detectada por el relevador, ste graba el instante de falla
como T
1
, posteriormente guarda una ventana de datos de la seal S
2
que involucre el
punto de falla. Esta seal se correlaciona con una ventana de la seal S
1
que se va
desplazando con el tiempo, cuando existe una correlacin mxima el relevador guarda
este tiempo como T
2
. Conociendo T
1
y T
2
y la velocidad de propagacin de las ondas
viajeras es posible determinar la ubicacin de la falla [44].
Correlacin Auxiliar. Es una mejora del algoritmo de correlacin cruzada para fallas
de alta impedancia, las cuales generalmente provocan errores en la estimacin de la
distancia a la falla [58].
Reconocimiento de Patrones. Funciona bsicamente de igual manera que el algoritmo
anterior, la diferencia radica en que en lugar de correlacionar las seales S
1
y S
2
se
obtiene la distancia entre ambas seales (vectores). La distancia entre dos vectores es
un indicador de la similitud que existe entre estos, obtenindose una mnima distancia
cuando ms parecidos son los vectores. Las distancias de Manhattan y Euclidiana
proporcionan la mxima similitud entre las seales S
1
y S
2
[47].
Funcin Compuesta. Utiliza el cociente de la funcin de correlacin entre la
funcin de distancia de Manhattan o Euclidiana. Se basa en el hecho que
cuando ms semejantes son las seales S
1
y S
2
la funcin de correlacin arroja
un valor mximo mientras que la funcin de distancias de Manhattan o
Euclidiana obtiene un mnimo, lo cual provoca un resultado mas pronunciado.
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 105 -
Excepto por el mtodo filtro de secuencias, los mtodos restantes de deteccin,
discriminacin direccional y localizacin de fallas en lneas de transmisin basados en
Ondas Viajeras tienen pasos comunes. La Figura 5.1 muestra un diagrama a bloques de un
relevador de Onda Viajera.
Figura 5.1. Diagrama de bloques del relevador de Ondas viajeras.
5.2 FILTRO DE SECUENCIAS
En [48] se estudi la viabilidad de las tcnicas de ondas viajeras para la proteccin de lneas
de transmisin. En este trabajo se propuso una tcnica digital, la cual se basa en extraer la
onda viajera de los voltajes y corrientes de fase.
5.2.1 Extraccin de Ondas Viajeras
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 106 -
Las ondas viajeras se pueden extraer de los voltajes y corrientes modales usando filtros de
secuencias. Un filtro de secuencias, es bsicamente, un algoritmo que utiliza una secuencia de
muestras para obtener informacin sobre los cambios en la seal. Las ondas viajeras producen
cambios repentinos en las seales de voltaje y corriente, como se muestra en la Figura 5.2.
Estos cambios repentinos en las seales de voltaje y corriente pueden ser detectados usando
filtros de secuencias que son clasificados en base a la ventana de datos y a la estructura del
filtro. El tamao de la ventana de datos es un aspecto importante en la deteccin de Ondas
Viajeras.
Figura 5.2 Seal de voltaje debida a Ondas Viajeras
Incrementar la ventana de datos incrementa la precisin, pero el tamao de la regin sin
proteccin aumenta. Se estudiaron varios filtros de secuencias con diferentes nmeros de
muestras y diferentes estructuras para detectar la llegada de ondas viajeras en la posicin del
relevador. Como resultado de este estudio se demostr que el filtro de secuencias de tres
muestras es ptimo para detectar la llegada de ondas viajeras.
Filtro de secuencia con ventana de datos de tres muestras
Considrese un filtro de secuencias de tres muestras, el cual esta basado en la segunda
diferencia de muestras de voltaje y corriente (Ecuacin 5.1):
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 107 -
1 1
2
+
+ = A
n n n n
V V V V (5.1)
donde
V
n+1
es la (n+1)
th
muestra de voltaje,
V
n
es la n
th
muestra de voltaje, y
V
n-1
es la (n-1)
th
muestra de voltaje.
La transformada Z de la Ecuacin 5.1 es:
( )
1 0 1
2
+
+ = z z z z H (5.2)
La Ecuacin 5.2 en el dominio de la frecuencia se convierte en:
( ) ( ) ( ) 1 cos 2 2
0
A = + =
A A +
T e e e H
T j T j
e e
e e
(5.3)
La respuesta en frecuencia del filtro para una frecuencia de muestreo de 1Mhz se muestra en la
Figura 5.3
Figura 5.3 Respuesta a la frecuencia del filtro de secuencias de tres muestras
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 108 -
La Figura 5.4 muestra la salida del filtro de secuencias, los picos confirman la presencia de
ondas viajeras, tambin se observa que cuando la onda viajera no esta presente en la seal, la
salida del filtro es cero.
Figura 5.4 Salida del filtro de secuencias de tres muestras
5.2.2 Localizacin de Fallas utilizando Filtro de Secuencias.
A continuacin se analiza una tcnica de una sola terminal (single ended) para detectar y
localizar fallas en lneas de transmisin.
Figura 5.5 Propagacin de ondas viajeras en un sistema de potencia
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 109 -
Considrese el sistema de potencia que se muestra en la Figura 5.5, con un circuito que
conecta el bus A con el bus B. Un relevador digital de ondas viajeras, Ra, se coloca en el bus
A donde adquiere los voltajes y las corrientes, convirtindolas posteriormente en voltajes y
corrientes modales. Los modos areos 1 y 2 de voltajes y corrientes se pasan a travs del filtro
de secuencias.
Cuando una falla ocurre en una lnea de transmisin, las ondas viajeras de voltaje y corriente
se originan y se propagan en la lnea desde el lugar donde ocurre la falla. Una onda viaja hacia
el bus A y otra hacia el bus B. Despus de unos microsegundos, la onda viajera llega al bus A.
Cuando la onda viajera es detectada por el relevador, Ra, se enciende un contador. Los picos
de voltaje y corriente que llegan al relevador son mostrados como V
S1
e I
S1
en la salida del
filtro de secuencias en la Figura 5.6. Las polaridades opuestas de los picos de voltaje y
corrientes confirman la ocurrencia de la falla.
Figura 5.6 Salida del filtro de secuencias en el relevador Ra
El bus acta como una discontinuidad en el camino de la onda viajera, parte de la onda de
voltaje y de corriente es reflejada y el resto pasa a travs del bus. La onda reflejada llega a la
falla, donde parte de la onda de voltaje y de corriente es reflejada. Estas ondas viajan hacia el
bus A por segunda vez. La llegada de las ondas es detectada por el relevador Ra. Los picos
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 110 -
que corresponden a las ondas de voltaje y corriente se muestran como V
S2
e I
S2
en la Figura
5.6. El contador se detiene y el tiempo se denota como Ta.
La distancia que recorren las ondas viajeras es dos veces la distancia del punto de falla al bus
A, por tanto, la distancia a la falla puede ser calculada con la Ecuacin 5.4.
Vp
T
D
a
=
2
(5.4)
donde, Vp es la velocidad de propagacin de la onda viajera.
Si la distancia D es menor que la longitud de la lnea protegida, el relevador enva la seal de
disparo a los interruptores para aislar la lnea fallada del resto del sistema. Si el valor D es
mayor que la longitud de la lnea protegida, el relevador regresa a su operacin normal.
Cuando la onda viajera llega al bus B, parte de la onda es reflejada hacia la falla. Parte de la
onda de voltaje y de corriente es reflejada, y regresa hacia el bus A. Cuando las ondas pasan a
travs de la falla, llegan al bus A, son detectadas por el relevador Ra. Los picos
correspondientes a estas ondas de voltaje y corriente se muestran como V
S3
e I
S3
en la Figura
5.6. Las mismas polaridades de los picos de estas ondas, las distinguen de las ondas que
viajan del punto de falla al bus A.
5.2.3 Algoritmo
El diagrama de flujo de la tcnica de una sola terminal se muestra en la Figura 5.7. Los pasos
que se siguen para detectar, discriminar y localizar la falla son los siguientes:
1. Inicializar las variables CV y CI a cero.
2. Obtener las muestras de voltaje y corriente a una frecuencia de muestreo de 1 Mhz.
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 111 -
3. Calcular los modos areos de voltaje y corriente.
4. Pasar las muestras a travs del filtro de secuencias.
5. Verificar si hay picos presentes en la salida del filtro de secuencias.
6. Si se detectan picos, se comparan las polaridades de los picos de voltaje con los de
corriente.
7. Si las polaridades de los picos de voltaje y de corriente son diferentes, se incrementan
las variables CV y CI en 1.
8. Compara los valores de las variables con 2.
9. Si los valores de las variables no son iguales a 2, entonces enciende el contador.
10. Si los valores de las variables son iguales a 2, comparar las polaridades del segundo
conjunto de picos de voltaje y corriente con las polaridades del primer conjunto de
picos respectivamente.
11. Si las polaridades son iguales, detener el contador y grabar el tiempo.
12. Calcular la distancia a la falla.
13. Si la distancia calculada es menor que la longitud de la lnea de transmisin protegida,
se envan las seales de disparo a los interruptores.
14. De otra forma, la falla es externa a la lnea protegida.
15. Reiniciar las variables a cero.
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 112 -
SI
SI
NO
SI
SI
SI
NO
NO
Figura 5.7 Diagrama de flujo del mtodo de Filtro de Secuencias.
Inicio
Se detectaron picos
en V & I?
CV=0 & CI=0
Cargar muestras de
V & I
Calcular modos areos
V & I
Filtro de
Secuencias
V & I tienen polaridad
diferente?
CV=CV+1
CI=CI+1
Es CV=2 & CI=2?
Iniciar Contador
Es la polaridad del 2do. set de
picos igual al 1ro?
Detiene Contador y graba
tiempo actual (Ta)
Calcula
D=(Ta/2)*Vp
Inicializa variables
CV=0 & CI=0
Es D < Lnea? TRIP
NO
NO
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 113 -
5.2.4 Resultados obtenidos
La Figura 5.8 muestra el sistema de potencia utilizado para analizar el relevador de Ondas
Viajeras con filtro de secuencias en ATP/EMTP. La Tabla 5.1 muestra los resultados
obtenidos al utilizar el modo 1 de la transformacin de Karrenbauer. En la Tabla 5.2 se
observan los resultados de utilizar el modo 2 de la transformacin de Karrenbauer.
Figura 5.8 Sistema de prueba 3.
Tabla 5.1 Resultados obtenidos usando la Transformacin de Karrenbauer modo 1
Tabla 5.2 Resultados obtenidos usando la Transformacin de Karrenbauer modo 2
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 114 -
Error Significa que el relevador no detect falla.
En la Tabla 5.1 se observa que al utilizar el modo 1 de la matriz de transformacin de
Karrenbauer el relevador de ondas viajeras no detecta fallas de tipo C-G. La Tabla 5.2
muestra que al utilizar el modo 2 de la matriz de transformacin de Karrenbauer el relevador
no detecta fallas de tipo B-G. La Tabla 5.3 muestra la respuesta del relevador al implementar
los modos areos 1 y 2.
Tabla 5.3 Resultados obtenidos usando la Transformacin de Karrenbauer Modo 1 y Modo 2
Nota: Los resultados de las Tablas 5.1 5.2 y 5.3 son obtenidos en Matlab, ya que se tiene
mayor precisin que los resultados obtenidos en ATP/EMTP para una misma frecuencia de
muestreo y ante condiciones de falla semejantes.
En la siguiente seccin se muestra el comportamiento del algoritmo ante fallas que involucran
bajo ngulo de insercin, alta impedancia, as como tambin fallas que ocurren cerca del
relevador o en el bus remoto.
5.2.4.1 Bajo ngulo de insercin de la falla (POW 0)
A travs de un estudio en el que se simularon fallas A-G, B-G y C-G con bajo ngulo de
insercin, se encontr que el algoritmo detecta y localiza fallas que ocurren antes de
179.8549 y despus de 180.7176, independientemente de la distancia a la que ocurra la falla.
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 115 -
Existe una zona en la que el algoritmo no detecta la falla, esta zona abarca desde 0.1451 antes
del cruce por cero hasta 0.7176 despus del cruce por cero de la onda de voltaje.
5.2.4.2 Falla de alta impedancia
Se verific el comportamiento del algoritmo ante una falla con bajo ngulo de insercin y alta
impedancia, para ello se hicieron simulaciones con ngulo de insercin de 179.8549 a
diferentes distancias de la lnea de transmisin y con diferentes valores de impedancia. Como
resultado de este estudio se determin que para las fallas que ocurren a 20km del relevador la
mxima impedancia de falla para la cual el relevador opera correctamente es de 85, mientras
que para una falla a 180km del relevador la mxima impedancia de falla es 1.1K.
5.2.4.3 Fallas cercanas al Relevador y en el bus remoto
Para fallas que ocurren a 4km de la posicin del relevador la deteccin y la localizacin de la
falla se hacen de forma adecuada. El algoritmo detecta fallas que suceden 3km despus del
relevador pero la localizacin de la falla no es correcta. El algoritmo no tiene problemas en
detectar fallas que ocurren al final de la lnea de transmisin, es decir, en el bus remoto.
5.3. LOCALIZADOR TIPO D CON SINCRONIZACIN VA GPS.
En [57] se desarroll un esquema de proteccin de lneas de transmisin basado en Ondas
Viajeras que utiliza un localizador tipo D con sincronizacin va GPS para hacer la deteccin,
discriminacin y localizacin de la falla. La Figura 5.9 muestra el principio de funcionamiento
del localizador tipo D con sincronizacin va GPS.
La distancia a la falla calcula por el relevador 1 y 2 est dada por L
1
y L
2
respectivamente:
p
p
V
T T
L
A
=
2
1
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 116 -
(5.5)
p
p
V
T T
L
A +
=
2
2
Donde V
p
es la velocidad de propagacin de las Ondas Viajeras,
1 2
T T T = A y
P
T es el
tiempo que le toma a la onda viajera en recorrer el total de la lnea.
Vp = 292460km/s para el modo areo 1 (Apndice B).
Tp=Longitud_Lnea/Vp. Para una lnea de transmisin de 200km Tp = 0.0006838 seg.
Figura 5.9. Principio de operacin del sistema del localizar tipo D.
El sistema de localizacin de fallas cuenta con relojes sincronizados a travs de un Sistema de
Posicionamiento Global (GPS) en ambas terminales de la lnea que registran con gran
exactitud el tiempo en que llegan las ondas viajeras. La velocidad de propagacin de una onda
viajera es de aproximadamente 300 metros por microsegundo, lo cual requiere que un reloj
este sincronizado respecto al otro por menos de un microsegundo. Esto permite tener una
precisin en la localizacin de la falla de 300 metros. Para determinar la distancia a la falla
solo se requiere conocer el tiempo en el que llega el primer frente de onda al relevador 1 y al
relevador 2, obtenindose T
1
y T
2
. Conociendo el valor de T
1
y T
2
y su diferencia (T = T
2
-
T
1
) se puede conocer la distancia a la falla desde ambos extremos (5.5), de tal forma que si la
falla es al 50% de la lnea de transmisin, T es cero.
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 117 -
Debido a que se utiliza slo el primer frente de onda, el sistema de localizacin de fallas
basado en ondas viajeras no es afectado por condiciones de carga, fallas de alta impedancia y
ms notablemente, por bancos de capacitores serie.
5.3.1 Resultados del localizador tipo D con sincronizacin va GPS
La Figura 5.10 muestra un sistema de potencia con dos generadores conectado por una lnea
de transmisin de 200km.
Figura 5.10 Modelos del localizador tipo D con GPS en ATP/EMTP.
En el sistema de potencia de la Figura 5.10 se simula una falla monofsica A-G a 60km del
relevador 1 y a 140km del relevador 2. Las Figuras 5.11 y 5.12 muestran las seales de
corriente y voltaje vistas por el relevador 1 y 2, respectivamente.
a) b)
Figura 5.11. Seales del Relevador 1. POW=120. a) Voltajes b) Corrientes.
(f ile GPS2.pl4; x-v ar t) v :X0038A v :X0038B v :X0038C
0 5 10 15 20 25 30 35
[ms]
-500
-375
-250
-125
0
125
250
375
500
[kV]
(f ile GPS2.pl4; x-v ar t) c:X0038A-X0005A c:X0038B-X0005B c:X0038C-X0005C
0 5 10 15 20 25 30 35
[ms]
-12.5
-10.0
-7.5
-5.0
-2.5
0.0
2.5
5.0
[kA]
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 118 -
a) b)
Figura 5.12. Seales del Relevador 2. POW=120. a) Voltajes b) Corrientes.
Las Figuras 5.13a y 5.13b muestran las funciones de discriminacin d
f
y d
r
obtenidas por los
relevadores 1 y 2 respectivamente.
a) b)
Figura 5.13 a) Seales d
f1
y d
r1
T
1
= 0.0182 Seg b) Seales d
f2
y d
r2
T
2
=0.01845 Seg
De la Figura 5.13 obtenemos T1, T2 y T a una frecuencia de muestreo de 80Khz: T1 =
0.0182 Seg, T2 = 0.01844 Seg, y T = 2.4e-4
Sustituyendo T1, T2 y T en la Ecuacin 5.5 se obtiene L
1
y L
2
:
(f ile GPS2.pl4; x-v ar t) v :X0072A v :X0072B v :X0072C
0 5 10 15 20 25 30 35
[ms]
-500
-375
-250
-125
0
125
250
375
500
[kV]
(f ile GPS2.pl4; x-v ar t) c:X0072A-X0021A c:X0072B-X0021B c:X0072C-X0021C
0 5 10 15 20 25 30 35
[ms]
-6000
-4500
-3000
-1500
0
1500
3000
[A]
(f ile GPS2.pl4; x-v ar t) m:DF1 m:DR1
15 17 19 21 23 25 [ms]
0
10
20
30
40
50
60
*10
6
(f ile GPS2.pl4; x-v ar t) m:DF1 m:DR1
15 17 19 21 23 25 [ms]
0
5
10
15
20
25
30
*10
6
km L 443 . 63
1
=
km L 56 . 136
2
=
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 119 -
En la Figura 5.14 se observa las distancias L
1
y L
2
calculadas en ATP/EMTP.
Figura 5.14 Distancias obtenidas por los relevadores, Rel1=63.44km y Rel2=136.56km
Las Tablas 5.4 y 5.5 muestran las distancias a la falla calculadas por el relevador 1 y 2
respectivamente. Para esta simulacin se utiliz una frecuencia de muestreo de 100 kHz.
Tabla 5.4 Distancias a la falla calculadas por el relevador 1.
Tabla 5.5 Distancias a la falla calculadas por el relevador 2.
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 120 -
La precisin con la que se localiza una falla se puede mejorar si se aumenta la velocidad de
muestreo, sin embargo, ATP/EMTP tiene una capacidad de memoria limitada. Debido a esta
limitacin no se efectuaron simulaciones a frecuencias de muestreo superiores a 100Khz. Por
lo tanto, a una velocidad de muestreo de 1Mhz (T=1 seg) se producira un error de 300
metros.
5.3.1.1 Fallas con bajo ngulo de insercin.
Para evaluar el comportamiento del algoritmo ante fallas monofsicas con bajo ngulo de
insercin (POW), se simul una falla A-G a 60km del relevador 1 con un POW de 180.2745
grados. La Figura 5.15 muestra el comportamiento de los voltajes en el punto de falla.
Figura 5.15 Voltajes medidos en el punto de falla.
Las Figuras 5.16 y 5.17 muestran las seales S
1
, S
2
, d
f
y d
r
obtenidas por el relevador 1 y 2,
respectivamente.
a) b)
Figura 5.16 Ondas viajeras vistas por el relevador 1. a) Seales S
1
y S
2
b) d
f
y d
r
.
(f ile GPS2.pl4; x-v ar t) v :X0001A v :X0001B v :X0001C
0 5 10 15 20 25 30 35
[ms]
-500
-280
-60
160
380
600
[kV]
(f ile GPS2.pl4; x-v ar t) m:S11 m:S21
16 18 20 22 24 26 28 30 32
[ms]
-4
-3
-2
-1
0
1
2
3
4
*10
6
(f ile GPS2.pl4; x-v ar t) m:DF1 m:DR1
15 18 21 24 27 30 [ms]
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
*10
6
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 121 -
a) b)
Figura 5.17 Ondas viajeras vistas por el relevador 2. a) Seales S
1
y S
2
b) d
f
y d
r
.
En la Figura 5.18 se observa que el relevador 1 detecta la falla a 61.98km mientras que el
relevador 2 detecta la falla a 138.02km. Se puede concluir que el ngulo de insercin con el
que ocurre una falla no afecta al algoritmo de localizacin tipo D con sincronizacin GPS.
Figura 5.18 Distancia a la falla calculada por el Relevador 1 y 2.
5.3.1.2 Fallas de alta impedancia
Para evaluar el comportamiento del algoritmo a fallas de alta impedancia, se simul una falla
A-G a 180km del relevador 1 con un ngulo de insercin de 180.2745 y una impedancia de
falla de 1k. Lo anterior se hace con el objetivo de simular la peor condicin de falla posible,
es decir, falla de alta impedancia con bajo ngulo de insercin. Las Figuras 5.19a y 5.19b
muestran las seales d
f
y d
r
del relevador 1 y 2 respectivamente. La Figura 5.19c muestra la
distancia a la falla calculada por ambos relevadores.
(f ile GPS2.pl4; x-v ar t) m:S11 m:S21
15 18 21 24 27 30 [ms]
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
*10
6
(f ile GPS2.pl4; x-v ar t) m:DF1 m:DR1
15 18 21 24 27 30 [ms]
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
*10
6
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 122 -
La falla de alta impedancia no afecta al mtodo de deteccin y discriminacin, sin embargo,
para fallas a partir de 1K en adelante van creciendo los errores en la estimacin de la
distancia a la falla.
a) b)
c)
Figura 5.19 a) Seales d
f
y d
r
Relevador 1. b) Seales d
f
y d
r
Relevador 2.
c) Distancia a la falla calculada por el Relevador 1 y 2
5.3.1.3 Fallas cercanas al Relevador.
La velocidad de muestreo es de 100Khz, es decir, se adquieren muestras de voltaje y corriente
cada 10s. En 10s la onda viajera recorre 2.92km, por tanto, el algoritmo solo detectar
fallas que ocurren a 2.92km de la posicin de cualquiera de los relevadores.
(f ile GPS2.pl4; x-v ar t) m:DF1 m:DR1
10 14 18 22 26 30 [ms]
0
15
30
45
60
75
90
*10
3
(f ile GPS2.pl4; x-v ar t) m:DF1 m:DR1
10 14 18 22 26 30 [ms]
0
40
80
120
160
200
*10
3
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 123 -
5.4. LOCALIZADOR TIPO D CON MUESTRAS DE CORRIENTE Y
SINCRONIZACIN VA GPS.
Utiliza el mismo principio del esquema de proteccin explicado en el apartado anterior, sin
embargo, slo se utilizan las muestras de corriente para hacer la discriminacin y localizacin
de la falla. Al utilizar muestras de corriente, la ecuacin 3.9 se convierte en:
( ) ( ) t i Z t S
c
A =
1
(5.6)
( ) ( ) t i Z t S
c
A =
2
Al sustituir 5.6 en 3.15 se obtiene que d
f
= d
r
, por lo tanto, no se puede utilizar el criterio de
discriminacin de Michels para determinar si la falla es interna o externa.
La Figura 5.20 muestra un sistema de potencia con tres lneas de transmisin de igual
longitud.
Figura 5.20 Sistema de potencia.
Sea Tp el tiempo en que la onda viajera recorre el total de la longitud de la lnea de
transmisin (A-B) y t el tiempo de simulacin en que ocurre la falla.
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 124 -
Caso A. Falla al 50% de la lnea 1.
Si se simula una falla al 50% de la lnea 1, entonces el relevador 1 detecta la llegada de la
onda viajera en Tp t T
2
1
1
+ = y el relevador 2 detecta la llegada de la onda viajera en
Tp t T
2
3
2
+ = , entonces Tp Tp t Tp t T T T = |
.
|
\
|
+ |
.
|
\
|
+ = = A
2
1
2
3
1 2
.
Caso B. Falla al 1% de la lnea 2.
Si se simula una falla al 1% de la lnea 2, entonces el relevador 1 detecta la llegada de la onda
viajera en Tp t T
100
1
1
+ = y el relevador 2 detecta la llegada de la onda viajera en
Tp t T
100
99
2
+ = , entonces Tp Tp t Tp t T T T
100
98
100
1
100
99
1 2
= |
.
|
\
|
+ |
.
|
\
|
+ = = A .
Caso C. Falla al 25% de la lnea 3.
Si se simula una falla al 25% de la lnea 3, entonces el relevador 1 detecta la llegada de la
onda viajera en Tp t T
4
5
1
+ = y el relevador 2 detecta la llegada de la onda viajera en
Tp t T
4
1
2
+ = , entonces Tp Tp t Tp t T T T = |
.
|
\
|
+ |
.
|
\
|
+ = = A
4
5
4
1
1 2
.
Al analizar los resultados obtenidos, se determin que para fallas que ocurren fuera de la zona
de proteccin T = Tp, y para fallas que ocurren dentro de la lnea protegida T < Tp.
Entonces, la condicin de falla interna y externa es de la siguiente manera:
Si T < Tp entonces la falla es interna.
Si T = Tp entonces la falla es Externa.
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 125 -
Una vez que se determina que la falla es dentro de la lnea protegida, se graba el tiempo en que
d
f
llega al relevador 1 y al relevador 2, obtenindose T
1
y T
2
, respectivamente. Posteriormente,
se utiliza la Ecuacin 5.5 para determinar la distancia a la falla. La Figura 5.21 muestra el
modelo del relevador de Onda Viajera en ATP/EMTP.
Figura 5.21 Modelo del relevador de onda viajera en ATP/EMTP.
Debido a que el algoritmo utiliza solo muestras de corriente, es posible incrementar la
velocidad de muestreo a 200Khz, obtenindose un error de 500m en la estimacin de
distancia a la falla, independientemente de donde sta ocurra. La mnima distancia a la cual se
detecta y se localiza una falla es a 1.46km despus de la posicin de cada relevador. Los
resultados obtenidos muestran una correcta operacin ante fallas que ocurren dentro y fuera de
la lnea protegida.
5.5 ALGORIMTO DE CORRELACIN
La correlacin es una medida de la relacin lineal entre dos variables. Los mtodos de
correlacin son ampliamente usados en aplicaciones donde una seal tiene que ser detectada
en la presencia de ruido [52]. Las tcnicas de correlacin pueden ser aplicadas a seales
continuas y discretas.
El propsito de la autocorrelacin es analizar la relacin entre los valores de un mismo
proceso aleatorio en diferentes tiempos. La funcin de autocorrelacin x(k) est dada por:
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 126 -
( ) ( ) ( )
=
+ A A =
N
k
x
t k x t k x
N
R
1
1
t t (5.7)
donde = m . t y m es el nmero de muestras de dos formas de onda que son desplazadas
una de la otra. Aqu, t es el intervalo de muestreo y N es el total de muestras en el intervalo
de tiempo T.
La funcin de correlacin cruzada (cross-correlation) de dos seales x(k) y(k), esta definida
por:
( ) ( ) ( )
=
+ A A =
N
k
xy
t k y t k x
N
R
1
1
t t (5.8)
La funcin de covarianza cruzada (cross-covariance) de las seales x(k) y(k) a las cuales se
les ha removido su valor medio est dada por:
( ) ( ) ( ) ( )
=
(
+ A
(
A = u
N
k
xy
y t k y x t k x
N
1
_ _
1
t t t (5.9)
( )
=
A =
N
n
t n x
N
x
1
_
1
(5.10)
( ) ( )
=
+ A =
N
n
t k y
N
y
1
_
1
t t (5.11)
La funcin de covarianza cruzada
S1S2
puede ser utilizada para encontrar la mxima relacin
entre las seales del relevador S
1
y S
2
. Las seales del relevador S
1
y S
2
tienen diferentes
valores medios, sobre los cuales las seales de ondas viajeras estn sper-impuestas. Si se
considera la salida de la correlacin cruzada entre estas dos seales, ser difcil encontrar la
relacin correcta debido al efecto de los valores medios. Entonces se remueven los valores
principales para obtener una mayor correlacin entre las dos seales. Los frentes de onda
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 127 -
reflejados desde el punto de falla tendrn signos opuestos al del frente de onda viajera en
direccin hacia la falla. Para obtener un pico positivo de
S1S2
en el tiempo en el cual las dos
seales coinciden, se cambia el signo de S
2
antes de correlacionarlo con S
1
. La funcin de
covarianza cruzada (Ecuacin 5.12) entre la seal almacenada de S
2
y la seal reflejada S
1
esta
dada por:
( ) ( ) ( ) ( )
=
(
+ A
(
A = u
N
k
S S
S t k S S t k S
N
1
_
2 1
_
2 2 2 1
1
t t t (5.12)
donde
( )
=
A =
N
n
t n S
N
S
1
2
_
2
1
(5.13)
y
( ) ( )
=
+ A =
N
n
t n S
N
S
1
1
_
1
1
t t (5.14)
Donde
_
1
S y 2
_
S son los valores medios de las seales S
1
y S
2
en sus respectivos grupos. El
tiempo desplazado corresponde el valor pico de
S1S2
puede ser usado para calcular la
distancia a la falla. Con frecuencia se usa el trmino de correlacin cruzada (cross-correlation)
para referirse a la covarianza cruzada (cross-coovariance). Aunque los dos trminos tienen
significados diferentes se usar en el resto de la tesis correlacin cruzada para referirse a la
covarianza cruzada.
5.5.1 Principio de funcionamiento del algoritmo de Correlacin Cruzada
Cuando una falla ocurre a determinada distancia del relevador, se generan Ondas Viajeras que
se propagan a lo largo de la lnea de la lnea de transmisin. Las Ondas Viajeras S
1
(t) y S
2
(t) se
propagan a lo largo de la lnea de transmisin en direcciones opuestas. Cuando las seales
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 128 -
S
1
(t) y S
2
(t) llegan a una discontinuidad, parte de estas son reflejadas, y parte pasan a otras
secciones del sistema.
En la Figura 5.22 se muestra el diagrama de Bewley lattice en el que se observa la
propagacin de las ondas viajeras en un Sistema de Potencia.
Figura 5.22 Diagrama de Bewley lattice
La distancia a la falla puede ser determinada si se conoce el instante en el que V
F1A1
(T
1
) y
V
F4A4
llegan al bus A (T
2
), entonces,
p
V
T T
D
=
2
1 2
(5.15)
donde V
p
es la velocidad de propagacin de la onda viajera.
El objetivo de la funcin de correlacin es identificar la seal V
F4A4
(Figura 5.22) y el tiempo
en que esta seal llega al bus A.
El algoritmo de deteccin y discriminacin revisa posibles disturbios analizando la secuencia
en que S
1
y S
2
rebasan cierto nivel predeterminado. Cuando se detecta una condicin de falla y
se determina que es delante de la posicin del relevador se habilita el algoritmo de
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 129 -
localizacin. El algoritmo de localizacin carga una ventana de 10 muestras de la seal S
2
, que
involucre algunas muestras antes y despus del punto de falla para tener una mejor
representacin de la seal. A travs de un estudio, se encontr que una ventana que contenga 3
muestras antes y 7 muestras despus del disturbio (incluyendo el punto de falla) es capaz de
producir picos pronunciados en la salida de la funcin de correlacin. Una vez que se termina
de almacenar la ventana de 10 muestras de la seal S
2
se obtiene el tiempo T
1
.
De la misma manera que S
2
, se almacena una ventana de 10 muestras de la seal S
1
. Una vez
que se tienen almacenada las seales S
1
y S
2
se realiza la correlacin cruzada aplicando las
ecuaciones 5.12-5.14. S
2
es una seal patrn y S
1
se va desplazando con cada muestra
adquirida. Este proceso se repite durante un tiempo igual a 2Tp+7*t, donde Tp es el tiempo
que le lleva a la onda viajera recorrer el total de la lnea de transmisin y t es el periodo de
muestreo. Al terminar este proceso se analiza la salida de la funcin de correlacin cruzada y
donde se encuentra el valor mximo se obtiene el tiempo T
2
. Conociendo T
1
y T
2
se determina
la ubicacin de la falla empleando la Ecuacin 5.15.
5.5.2 Resultados del algoritmo de correlacin.
En la Figura 5.23 se observan las seales S
1
y S
2
para una falla AB-G que ocurre a 80 km del
relevador en un tiempo t=0.0222 seg. El relevador detecta la falla en T
1
= 0.023275seg.
Figura 5.23 Seales S
1
y S
2
para una falla AB-G a 80 km del relevador.
(f ile Correlacion.pl4; x-v ar t) m:S1 m:S2
23.00 23.34 23.68 24.02 24.36 24.70 [ms]
-300
-200
-100
0
100
200
300
400
500
*10
3
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 130 -
S
2
es una seal patrn y se correlaciona con S
1
, la cual se desplaza con cada muestra
adquirida. La Figura 5.24 muestra las seales S
1
, S
2
y la salida de la funcin de correlacin
obtenida al aplicar las Ecuaciones 5.12 a 5.14. En la Figura 5.24B tambin se observa que
despus de cierto nmero de desplazamientos S
1
es muy semejante a S
2
, instante (T
2
= 0.0239
seg) en el cual ocurre una mxima correlacin (Figura 5.24C).
Figura 5.24 A) Seales S
2
y S
1
(desplazada n muestras). B) Seales S
2
y S
1
(mxima correlacin)
C) Funcin de correlacin.
Una vez que se tiene los tiempos T
1
y T
2
se puede calcular la distancia a la falla, aplicando las
siguientes ecuaciones:
( ) ( )
292460 *
2
7 *
1 2
t T T
D
falla
A +
= (5.16)
( )
km
E
D
falla
598 . 78 292460 *
2
7 * 5 25 . 1 023275 . 0 0239 . 0
=
= (5.17)
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 131 -
El algoritmo desarrollado considera T
1
como el tiempo en que el relevador detecta un
disturbio, por lo tanto hay que sumar 7 * t A a T
1
(Ecuacin 5.16), es decir, se suman 7
muestras para que T
1
sea el tiempo en que se termina de almacenar la seal S
2
.
La Figura 5.25 muestra el resultado obtenido por ATP/EMTP.
Figura 5.25 Distancia a la falla calculada por ATP/EMTP. Dfalla = 78.599 km
La Tabla 5.6 muestra los resultados obtenidos al simular en ATP/EMTP diferentes tipos de
fallas a diferentes distancias del relevador.
Tabla 5.6 Resultados del algoritmo de correlacin.
La Figura 5.26 muestra el modelo creado en ATP/EMTP del relevador de onda viajera con
algoritmo de correlacin cruzada (estndar).
(f ile Correlacion.pl4; x-v ar t) m:DFALLA
0 5 10 15 20 25 30 35 40
[ms]
0
10
20
30
40
50
60
70
80
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 132 -
Figura 5.26 Modelo del relevador de O.V. en ATP/EMTP.
5.5.2.1 Bajo ngulo de insercin de la falla (POW 0)
Para determinar el comportamiento del algoritmo de correlacin ante fallas con bajo ngulo de
insercin, se simul una falla A-G a 40km del relevador del sistema de la Figura 5.26 y se
hizo un anlisis de sensitividad. Como resultado de este anlisis se determin que el algoritmo
opera correctamente ante fallas que ocurren 1.6265 antes y 0.8241 despus del cruce por
cero de la onda de voltaje de la fase A.
5.5.2.2 Falla de alta impedancia
El comportamiento del algoritmo de correlacin ante fallas de alta impedancia, se determin, a
travs de un estudio en el cual se simul una falla A-G a 40 km del relevador con distintas
impedancias de falla. El resultado de este estudio se muestra en las Figuras 5.27 a 5.30.
a) b)
Figura 5.27 R
Falla
= 100 a) Funcin de Correlacin b) Resultado ATP. D
Falla
= 40.213km
(f ile Correlacion.pl4; x-v ar t) m:CORRE
22.550 22.615 22.680 22.745 22.810 22.875 22.940
[ms]
-400
-200
0
200
400
600
800
*10
6
(f ile Correlacion.pl4; x-v ar t) m:DFALLA
21.0 22.5 24.0 25.5 27.0 28.5 30.0
[ms]
0
10
20
30
40
50
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 133 -
(f ile Correlacion.pl4; x-v ar t) m:CORRE
22.5 22.7 22.9 23.1 23.3 23.5 [ms]
-10
0
10
20
30
40
50
*10
6
(f ile Correlacion.pl4; x-v ar t) m:DFALLA
20 22 24 26 28 30 [ms]
0
30
60
90
120
150
a) b)
Figura 5.28 R
Falla
= 200 a) Funcin de Correlacin b) Resultado ATP. D
Falla
= 40.213km
a) b)
Figura 5.29 R
Falla
= 500 a) Funcin de Correlacin b) Resultado ATP. D
Falla
= 40.213km
En las Figuras 5.27 a 5.29 se observa que el algoritmo de correlacin determina la distancia a
la falla en forma correcta para una resistencia de falla de hasta 500, tambin se observa que a
medida que aumenta la resistencia de falla la salida de la funcin de correlacin es menos
pronunciada. La Figura 5.30 muestra que para una resistencia de falla de 600 el algoritmo
detecta la falla pero el clculo de la distancia es incorrecto.
a) b)
Figura 5.30 R
Falla
= 600 a) Funcin de Correlacin b) Resultado ATP. D
Falla
= 146.23km
(f ile Correlacion.pl4; x-v ar t) m:CORRE
22.550 22.615 22.680 22.745 22.810 22.875 22.940
[ms]
-400
-200
0
200
400
600
800
*10
6
(f ile Correlacion.pl4; x-v ar t) m:DFALLA
20 22 24 26 28 30 [ms]
0
10
20
30
40
50
(f ile Correlacion.pl4; x-v ar t) m:CORRE
22.550 22.615 22.680 22.745 22.810 22.875 22.940
[ms]
-400
-200
0
200
400
600
800
*10
6
(f ile Correlacion.pl4; x-v ar t) m:DFALLA
20 22 24 26 28 30 [ms]
0
10
20
30
40
50
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 134 -
Los resultados obtenidos slo son validos para fallas que ocurren a 40km del relevador. La
mxima impedancia de falla para la cual el relevador determina la distancia a la falla de forma
adecuada disminuye a medida que la falla se aleja del relevador.
5.5.2.3 Fallas cercanas al Relevador o al bus remoto
Para fallas que ocurren a 4km de la posicin del relevador, la deteccin y la localizacin de la
falla se hacen de forma adecuada, el algoritmo de correlacin determina que la falla sucede a
3.6558km del relevador. Para una falla que se simula a 196km de la posicin del relevador el
algoritmo determina que la distancia a la falla es de 190.1km.
5.6 FUNCIN DE CORRELACIN AUXILIAR
Cuando se tienen fallas de alta impedancia en una lnea de transmisin, la funcin de
correlacin estndar puede dar errores significativos en la localizacin de la falla. Para
eliminar esta limitacin, se requiere una funcin de correlacin auxiliar (CCF) que acta como
complemento [58].
Para fallas de alta impedancia la amplitud de la onda en retroceso (backward) V
F4A4
(Figura
5.22) es muy pequea. La funcin de correlacin auxiliar (CCF) y la estrategia son descritas a
continuacin.
5.6.1 Estrategia de la funcin de correlacin auxiliar
Primeramente, se detecta la llegada de S
2
, y se toma ese instante como T
1
. Despus, se puede
calcular la funcin de correlacin estndar
S1S2
con respecto a las subsecuentes ondas de S
1
,
de acuerdo a la Ecuacin 5.12. La seal patrn de
S1S2
debe ser S
2
. La mxima salida de la
funcin CCF corresponder a la seal en retroceso BS
1
y se toma ese instante como T
2
.
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 135 -
Una vez que se tiene T
1
y T
2
se puede calcular la distancia a la falla usando la siguiente
ecuacin:
( )
Vp
T T
D
e
=
2
1 2
1
(5.18)
Para fallas de baja impedancia, BS
1
corresponder a la seal deseada V
F4A4
, y T
2
ser el
instante A4 de la Figura 5.22, entonces D
e1
ser la actual distancia a la falla. Sin embargo,
para fallas de alta impedancia, B
S1
seria V
F5A5
, y la estimacin D
e1
seria incorrecta. Para
determinar si la primera estimacin D
e1
de la ubicacin a la falla es correcta, se construye una
funcin correlacin auxiliar
a
tomando BS
1
como patrn a correlacionar y calculando sus
valores principales removidos con respecto a ondas progresivas del tiempo T
1
a T
2
. El objetivo
de esta funcin de correlacin auxiliar es identificar la onda progresiva V
F2A5
, si la falla es de
alta impedancia. De la mxima salida de la funcin de correlacin auxiliar
a
se puede
localizar la seal F
S2
, la cual llega en el tiempo T
3
. Con este tiempo se puede hacer otra
estimacin de la distancia a la falla tomando el tiempo T
2
y T
3
:
( )
Vp
T T
D
e
=
2
3 2
2
(5.19)
Para fallas de alta impedancia, V
F5A5
genera la mxima salida de la CCF estndar. De esta
forma la mxima salida de
a
ser cuando se correlaciona V
F5A5
con V
A2F5
y T
3
ser el instante
A2 en la Figura 5.22. Entonces, la segunda estimacin D
e2
seria la actual distancia a la falla.
Para determinar cul de las dos estimaciones D
e1
o D
e2
es la correcta, se debe examinar la
salida de la CCF estndar en el instante T
1
+(T
2
-T
3
). Si hay un mximo local cerca de este
instante (con un rango de error permisible), la estimacin D
e2
ser tomada como el resultado
correcto de la distancia a la falla. Por otra parte, si no existe un mximo local cerca de ese
instante D
e1
es la estimacin correcta de la distancia a la falla.
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 136 -
5.6.2 Resultados de la tcnica de correlacin auxiliar.
Para validar la operacin del algoritmo de correlacin auxiliar se simula una falla A-G con
una resistencia de falla de 490 a 60km del relevador.
La Figura 5.31 muestras los tiempos T
1
, T
2
y T
3
calculados por el algoritmo.
Figura 5.31 Tiempos T
1
, T
2
y T
3
calculados por el algoritmo en ATP/EMTP.
De la Figura 5.31 se obtiene T
1
=0.025213, T
2
=0.026162 y T
3
=0.025625. La Figura 5.32
muestra los valores D
e1
y D
e2,
respectivamente calculados por el algoritmo en ATP/EMTP.
Figura 5.32 Resultados D
e1
=126.12 y D
e2
=60.32
Para determinar cul de los resultados (D
e1
o D
e2
) es el correcto se analiza si existe un mximo
en la funcin de correlacin en el tiempo T
1
+(T
2
-T
3
)=0.02575, considerando un rango de error
permisible. En la Figura 5.33 se observa un mximo local que se localiza a 3 muestras del
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 137 -
tiempo estimado. Por lo tanto la estimacin D
e2
es la correcta y la distancia a la falla es 60.32
km.
Figura 5.33 Salida de la funcin de correlacin en un tiempo T
1
+(T
2
-T
3
)=0.02575.
Para una distancia de 60km la mxima resistencia de falla con el que el algoritmo de
correlacin estndar localiza la falla de forma correcta es 350. Por otra parte, si se aplica el
algoritmo de correlacin auxiliar se logra incrementar hasta 490 la mxima resistencia de
falla.
5.7 RECONOCIMIENTO DE PATRONES
El principio bsico de proteccin mediante ondas viajeras es medir el intervalo de tiempo entre
la onda que llega desde el punto de la falla y su correspondiente onda reflejada como se ha
estudiado en [47].
La mayora de los esquemas de proteccin basados en ondas viajeras usan la funcin de
correlacin para reconocer el frente de onda que regresa de la falla para la localizacin de la
misma, sin embargo, esta tcnica puede no funcionar adecuadamente para fallas de alta
impedancia y algunas configuraciones del sistema. Los mtodos basados en reconocimientos
de patrones son usados en conjunto con la funcin de correlacin para tener una mejor
sensibilidad ante este tipo de fallas.
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 138 -
Uno de los mtodos ms usados en la teora de reconocimiento de patrones es el mtodo del
vecino ms cercano, en el cual el patrn de un vector de entrada es determinado por la
distancia ms cercana entre este vector y un vector de referencia. Esto se basa en la suposicin
de que el espacio es una buena descripcin de la similitud entre dos vectores.
En la proteccin basada en Ondas viajeras, solo un patrn necesita ser reconocido, el cual se
determina por la seccin almacenada de el primer frente de onda viajera en direccin hacia la
falla (forward). El algoritmo solo necesita medir sucesivamente la distancia entre S
2
y la
seccin de Onda viajera que se desplaza de la falla al relevador (Backward) S
1
. Cuando la
onda viajera con la misma forma que la seal de referencia llega al relevador, la salida de la
funcin tendr el mnimo valor.
Al igual que la funcin de correlacin estndar, los valores medios deben ser eliminados en el
mtodo de reconocimiento de patrones, esto es:
( ) ( ) 2
_
2 2
S k S k S = (5.20)
( ) ( ) 1
_
1 1
S k S k S = (5.21)
donde
( )
=
A =
N
n
t n S
N
S
1
2
_
2
1
(5.22)
( )
=
+ A =
N
n
t n S
N
S
1
1
_
1
1
t (5.23)
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 139 -
Despus, las dos seales son normalizadas:
( )
( )
( )
2
2
_
2
2
max S
S k S A
k S
= (5.24)
( )
( )
( )
1
1
_
1
1
max S
S k S A
k S
= (5.25)
El propsito de A es dar una resolucin para diferentes microprocesadores.
Ahora los dos vectores pueden ser evaluados con la misma escala de resolucin. El efecto de
la resistencia de falla es eliminado, ya que este mtodo provee una mejor medicin de la
similitud entre las dos formas de onda que el mtodo de correlacin.
5.7.1 Distancia de Manhattan y Distancia Euclidiana
Existen dos distancias que son usadas frecuentemente en el reconocimiento de patrones:
1. La distancia Euclidiana
( ) ( ) ( )
=
=
N
k
E
k S k S d
1
2
2 1
(5.26)
2. La distancia de Manhattan
( ) ( )
=
=
N
k
M
k S k S d
1
2 1
(5.27)
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 140 -
5.7.2 Funcin Compuesta
La funcin de correlacin y el mtodo del vecino ms cercano miden la similitud entre dos
seales. Para mejorar la capacidad de discriminacin y la confiabilidad se define la siguiente
funcin:
( )
( )
( )
1
C k d
k
k c
E
+
u
= u (5.28)
( )
( )
( )
1
C k d
k
k c
M
+
u
= u (5.29)
Donde el propsito de la constante C
1
es evitar la divisin entre cero. En la funcin
compuesta, el reciproco de la distancia de Manhattan puede ser interpretado como el
coeficiente de peso de la funcin de correlacin normalizada. Cuando se tenga una mxima
correlacin entre las seales S
1
y S
2
habr una mnima distancia de Manhattan, por lo tanto el
valor de salida de la funcin compuesta ser acentuado.
5.7.3 Resultados distancia de Manhattan, Euclidiana y Funcin compuesta.
La Figura 5.34 muestra el Sistema de Potencia utilizado para analizar el desempeo del
algoritmo de reconocimiento de patrones (distancia de Manhattan, distancia Euclidiana y
Funcin compuesta) ante distintos tipos de falla.
Figura 5.34 Modelo del relevador de O.V de Reconocimiento de patrones en ATP/EMTP.
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 141 -
Las Tablas 5.7, 5.8 y 5.9 muestran los resultados de implementar los algoritmos de distancia
de Manhattan, distancia Euclidiana y Funcin compuesta, respectivamente, en el sistema de
potencia de la Figura 5.34.
En las Tablas 5.7 y 5.8 se observa que los mtodos de distancia de Manhattan y Euclidiana
tienen errores en la localizacin de algunos tipos de falla, sin embargo, se requiere de mayor
investigacin en lo que se refiere a la velocidad de muestreo y ancho de la ventana de datos de
S
1
y S
2
para tratar de mejorar la respuesta de dichos algoritmos.
En la Tabla 5.9 se observa que al implementar el algoritmo de Funcin compuesta se eliminan
los errores debidos a los algoritmos de reconocimiento de patrones.
Tabla 5.7 Resultados de algoritmo de Distancia de Manhattan.
Tabla 5.8 Resultados de algoritmo de Distancia Euclidiana.
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 142 -
Tabla 5.9 Resultados de algoritmo de Funcin Compuesta.
5.7.3.1 Bajo ngulo de insercin de la falla (POW 0)
El estudio del comportamiento de los algoritmos de Distancia de Manhattan, Euclidiana y
Funcin compuesta ante fallas con bajo ngulo de insercin se realiz en el sistema de
potencia de la Figura 5.34, en el cual se simul una falla A-G a 40km del relevador con
distintos ngulos de insercin.
A travs de un anlisis de sensitividad ante diferentes ngulos de insercin se determin que el
algoritmo es capaz de detectar y localizar fallas que suceden 2.9866 antes y 0.8241 despus
del cruce por cero de la onda de voltaje.
5.7.3.2 Falla de alta impedancia
En las Figuras 5.35 y 5.36 se muestran los resultados de los algoritmos de Correlacin,
Distancia Euclidiana, de Manhattan y Funcin compuesta para una falla A-G a 40km del
relevador del sistema de la Figura 5.34.
En la Figura 5.35a se observa que para una resistencia de falla de 500 todos los algoritmos
determinan la distancia a la falla de forma correcta. En la Figura 5.35b se observa que para una
resistencia de falla de 600 el algoritmo de correlacin determina la distancia a la falla de
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 143 -
manera incorrecta mientras que los algoritmos basados en reconocimiento de patrones lo
hacen de forma adecuada.
a) b)
Figura 5.35 Resultados de la simulacin en ATP/EMTP. a) R
falla
=500 b) R
falla
=600
En la Figura 5.36 se observa que los algoritmos basados en reconocimiento de patrones
funcionan adecuadamente para altas resistencias de falla.
a) b)
Figura 5.36 Resultados de la simulacin en ATP/EMTP. a) R
falla
=1K b) R
falla
=1.2K
5.7.3.3 Fallas cercanas al Relevador y al bus remoto
El algoritmo de localizacin de fallas basado en Reconocimiento de Patrones opera
correctamente para fallas que suceden desde 4km de la posicin del relevador hasta 5km antes
del bus remoto.
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 144 -
5.8 CONCLUSIONES DEL CAPTULO.
En este captulo se programaron cinco algoritmos de localizacin de fallas en lneas de
transmisin basados en Ondas Viajeras: Filtro de secuencias, Localizador tipo D con
sincronizacin va GPS, Correlacin estndar, Correlacin auxiliar, Reconocimiento de
patrones (Distancia de Manhattan, Distancia Euclidiana y Funcin Compuesta). La
programacin de los algoritmos se realiz en ATP/EMTP.
Se hicieron diversos estudios de los algoritmos para determinar su comportamiento ante
diferentes condiciones de falla, como lo son: bajo ngulo de insercin, alta resistencia de falla
y fallas que suceden cerca al relevador o en el bus remoto. Los resultados obtenidos se
presentan a continuacin:
Filtro de secuencias
No oper correctamente ante fallas A-G, B-G y AB simuladas a 160km del
relevador.
La mxima impedancia de falla a la cual el algoritmo opero correctamente fue de
85 para una falla a 20km y 1.1K para una falla a 180km
No detect fallas con bajo ngulo de insercin desde 0.1451 antes del cruce por
cero hasta 0.7176 despus del cruce por cero de la onda de voltaje.
Requiere una frecuencia de muestreo de 1Mhz para operar.
Localizador tipo D con sincronizacin va GPS
La estimacin de la distancia a la falla no result afectada debido a alta
impedancia de falla y bajo ngulo de insercin.
La mnima y mxima distancia a la cual el relevador opera correctamente depende
de la frecuencia de muestreo.
Se pueden detectar, discriminar y localizar fallas utilizando nicamente muestras
de corriente.
Captulo 5. Localizacin de fallas mediante algoritmos de Onda Viajera.
P.G.I .I .E - 145 -
Correlacin estndar
No oper correctamente ante fallas AC-G simuladas a 160km del relevador.
La mxima impedancia de falla a la cual el algoritmo oper correctamente fue de
350 para una falla a 60km.
No detect fallas con bajo ngulo de insercin desde 1.6265 antes del cruce por
cero hasta 0.8241 despus del cruce por cero de la onda de voltaje.
Correlacin auxiliar
Mejora la capacidad de deteccin de fallas de alta impedancia del algoritmo de
correlacin estndar hasta 490 para una falla a 60km del relevador.
Reconocimiento de patrones (Distancia de Manhattan, Distancia Euclidiana y
Funcin Compuesta)
No oper correctamente ante fallas AC-G simuladas a 160km del relevador.
La mxima impedancia de falla a la cual el algoritmo opero correctamente fue de
500 para una falla a 40km.
No detect fallas con bajo ngulo de insercin desde 2.8241 antes del cruce por
cero hasta 0.8241 despus del cruce por cero de la onda de voltaje.
P.G.I .I .E
- 146 -
CAPTULO 6
EFECTOS DE LA COMPENSACI N SERI E FI J A
EN ALGORI TMOS DE ONDAS VI AJ ERAS.
6.1 INTRODUCCIN.
El concepto central en la compensacin serie es cancelar parte de la reactancia inductiva de la
lnea mediante la instalacin de capacitores serie. Esto incrementa la mxima potencia activa
transmitida e incrementa la potencia natural virtual. Sin embargo, al reducir la reactancia
efectiva de la lnea, se presenta con mayor intensidad el efecto capacitivo en derivacin, de
modo que, normalmente, se requerir de compensar mediante reactores en derivacin [59].
Dos clases principales de aplicacin de los capacitores serie son las siguientes:
1. Se pueden usar para incrementar la transferencia de potencia activa en lneas de cualquier
longitud. Algunas ocasiones, el capacitor serie es utilizado para incrementar la reparticin de
carga de una de dos o ms lneas en paralelo, especialmente donde una lnea de tensin ms
alta comparte el mismo derecho de va con una de voltaje ms bajo.
2. Se pueden usar para permitir que la potencia activa sea transmitida establemente sobre una
distancia mayor que la que es posible sin compensacin. Sobre lneas largas, la compensacin
inductiva en derivacin es necesaria, a fin de poder limitar el efecto Ferranti sobre la lnea, el
cual consiste en un incremento de voltaje en el extremo receptor de la lnea debido al efecto
capacitivo de la misma.
Capitulo 6. Efectos de la compensacin serie fija en algoritmos de onda viajera.
P.G.I .I .E
- 147 -
Un lmite mximo del grado de compensacin serie es del orden de 0.8. Si el grado de
compensacin serie es de 1 (k =1), la reactancia efectiva de la lnea sera cero, tal que la ms
pequea perturbacin en los ngulos relativos de los rotores de las mquinas sncronas
conectadas en los extremos de la lnea, dara como resultado un flujo de altas corrientes.
Adems, el circuito sera resonante en serie a la frecuencia fundamental y sera difcil el
control de voltajes y corrientes transitorias durante la ocurrencia de perturbaciones.
La reactancia del capacitor es determinada por las caractersticas de los estados estacionario y
transitorio de la transmisin de potencia activa, as como de su localizacin. Obviamente, no
es prctico distribuir la capacitancia en pequeas unidades a lo largo de la lnea. En la prctica,
una capacitancia concentrada es colocada en un pequeo nmero de localidades (una o dos), lo
cual causa que exista un perfil de voltaje no uniforme.
La compensacin por capacitores serie se realiza en el rango de X
C
= 25-80% de X
L
, siendo
X
L
la reactancia inductiva equivalente de la lnea por unidad de longitud. La cantidad o grado
de compensacin serie de una lnea de transmisin se define mediante la Ecuacin 6.1
X
X
k
C
=
(6.1)
X k X
C
= L X X
L
=
donde k = 0.25 0.80
X
L
es la reactancia inductiva equivalente de la lnea por unidad de longitud
L es la longitud de la lnea de transmisin.
La Figura 6.1 muestra los parmetros elctricos de la lnea de transmisin de la Figura A.1.
Capitulo 6. Efectos de la compensacin serie fija en algoritmos de onda viajera.
P.G.I .I .E
- 148 -
Figura 6.1 Parmetros elctricos de la lnea de transmisin en Power_lineparam
De la Figura 6.1 se obtiene la Inductancia serie por unidad de longitud km H L / 001031 . 0
1
= .
Con L
1
se puede calcular la reactancia inductiva equivalente de la lnea por unidad de
longitud (X
L
).
( ) ( ) km L j X
L
/ 3887 . 0 001031 . 0 60 2 O = = = t e (6.2)
La reactancia serie equivalente para una lnea de transmisin de 300km es:
( ) ( ) km X X
L
/ 61 . 116 3887 . 0 300 300 O = = = (6.3)
con una compensacin del 50%, se tiene:
( ) ( ) km X X
C
/ 305 . 58 51 . 116 5 . 0 5 . 0 O = = = (6.4)
Por otra parte, la reactancia capacitiva de la lnea es:
Capitulo 6. Efectos de la compensacin serie fija en algoritmos de onda viajera.
P.G.I .I .E
- 149 -
fC
X
C
t 2
1
= (6.5)
despejando C de la ecuacin 6.5 y sustituyendo valores se obtiene:
F
fX
C
C
t t
495 . 45
305 . 58 60 2
1
2
1
=
= = (6.6)
Aplicando las ecuaciones 6.4 y 6.6, se obtiene que el valor del capacitor para una
compensacin al 25% es de C = 90.99 F y para una compensacin al 75% se tiene C = 30.33
F.
6.2 CASOS DE ESTUDIO.
En esta seccin se analiza el comportamiento de las Ondas Viajeras ante lneas de transmisin
compensadas, posteriormente se har un estudio del desempeo de los algoritmos de
deteccin, discriminacin y localizacin estudiados en el captulo anterior. La Figura 6.2
muestra el sistema de potencia utilizado para evaluar los algoritmos de deteccin,
discriminacin direccional, clasificacin y localizacin.
Figura 6.2 Sistema de Potencia con Compensacin Serie Fija.
La Figura 6.3 muestra el comportamiento de las seales S
1
, S
2
, d
f
y d
r
para una falla AB-G a
150km, antes del banco de capacitores serie.
Capitulo 6. Efectos de la compensacin serie fija en algoritmos de onda viajera.
P.G.I .I .E
- 150 -
a) b)
Figura 6.3 Fallas AB-G a 150km del relevador. a) Seales S
1
y S
2
b) Seales d
f
y d
r
Las Figuras 6.4 a 6.6 muestran el comportamiento de las funciones S
1
, S
2
, d
f
y d
r
, para una
falla AB-G a 150km simulada despus del banco de capacitores serie para distintos grados de
compensacin.
a) b)
Figura 6.4 Fallas AB-G a 150km, despus del capacitor. Compensacin al 25%
a) Seales S
1
y S
2
b) Seales d
f
y d
r
Figura 6.5 Fallas AB-G a 150km, despus del capacitor. Compensacin al 50%
a) Seales S
1
y S
2
b) Seales d
f
y d
r
(f ile CS_GPS.pl4; x-v ar t) m:S11 m:S21
20 24 28 32 36 40 [ms]
-4
-3
-2
-1
0
1
2
3
4
*10
6
(f ile CS_GPS.pl4; x-v ar t) m:DF1 m:DR1
21 22 23 24 25 26 [ms]
0
10
20
30
40
50
60
*10
6
(f ile CS_GPS.pl4; x-v ar t) m:S11 m:S21
20 24 28 32 36 40 [ms]
-4
-3
-2
-1
0
1
2
3
4
*10
6
(f ile CS_GPS.pl4; x-v ar t) m:DF1 m:DR1
21 22 23 24 25 26 [ms]
0
10
20
30
40
50
60
*10
6
(f ile CS_GPS.pl4; x-v ar t) m:S11 m:S21
20 24 28 32 36 40 [ms]
-4
-3
-2
-1
0
1
2
3
4
*10
6
(f ile CS_GPS.pl4; x-v ar t) m:DF1 m:DR1
21 22 23 24 25 26 [ms]
0
10
20
30
40
50
60
*10
6
Capitulo 6. Efectos de la compensacin serie fija en algoritmos de onda viajera.
P.G.I .I .E
- 151 -
Figura 6.6 Fallas AB-G a 150km, despus del capacitor. Compensacin al 75%
a) Seales S
1
y S
2
b) Seales d
f
y d
r
En las Figuras 6.3 a 6.6 se observa que las seales d
f
y d
r
no son afectadas por la
compensacin serie, por consiguiente, es evidente que los algoritmos de deteccin,
discriminacin direccional y clasificacin de la falla no se sern afectados en su operacin.
6.2.1 Localizador tipo D con sincronizacin va GPS.
El Localizador tipo D con sincronizacin va GPS utiliza el primer frente de onda generado de
la funciones d
f
y d
r
para determinar la distancia a la falla. En las Figuras 6.3 a 6.6 se observa
que las seales d
f
y d
r
no son afectadas independientemente del grado de compensacin serie
que se utilice. Para corroborar el funcionamiento del localizador, se simula una falla AB-G a
200km del relevador 1 en el sistema de potencia de la Figura 6.2 con una compensacin de
0.5. La Figura 6.7 muestra las seales d
f
y d
r
obtenidas por los relevadores colocados en los
extremos de la lnea de transmisin.
a) b)
Figura 6.7 Seales d
f
y d
r
a) Relevador 1 (T1=0.022675) b) Relevador 2 (T2=0.02235)
(f ile CS_GPS.pl4; x-v ar t) m:S11 m:S21
20 24 28 32 36 40 [ms]
-4
-3
-2
-1
0
1
2
3
4
*10
6
(f ile CS_GPS.pl4; x-v ar t) m:DF1 m:DR1
21 22 23 24 25 26 [ms]
0
10
20
30
40
50
60
*10
6
(f ile CS_GPS.pl4; x-v ar t) m:DF2 m:DR2
21 22 23 24 25 26 [ms]
0
2
4
6
8
10
12
*10
6
(f ile CS_GPS.pl4; x-v ar t) m:DF2 m:DR2
21 22 23 24 25 26 [ms]
0
4
8
12
16
20
*10
6
Capitulo 6. Efectos de la compensacin serie fija en algoritmos de onda viajera.
P.G.I .I .E
- 152 -
La Figura 6.8 muestra la distancia a la falla calculada por los relevadores 1 y 2 en
ATP/EMTP.
Figura 6.8 Resultado obtenido por el relevador en ATP/EMTP.
Se simularon distintos tipos de fallas variando el grado de compensacin (0.25, 0.5 y
0.75) al 50% de la lnea de transmisin. Se concluye que la compensacin serie no afecta
ninguna de las funciones del algoritmo localizador tipo D con sincronizacin GPS,
independientemente del grado de compensacin de la misma.
6.2.2 Filtro de Secuencias.
Para analizar el comportamiento del esquema de localizacin de fallas en lneas de
transmisin con Filtros de Secuencias, se simula una falla A-G a 200km del relevador
(50km despus de la compensacin serie). La Figura 6.9 muestra la salida de voltaje y
corriente del Filtro de Secuencias.
(f ile CS_SF.pl4; x-v ar t) m:SFV1
9,0 9,4 9,8 10,2 10,6 11,0 [ms]
-60
-30
0
30
60
90
*10
3
Capitulo 6. Efectos de la compensacin serie fija en algoritmos de onda viajera.
P.G.I .I .E
- 153 -
Figura 6.9 Salida de voltaje y corriente del Filtro de Secuencias.
La Figura 6.10 muestra la distancia a la falla calculada por el relevador de Filtro de
Secuencias en ATP/EMTP.
Figura 6.10 Distancia a la falla calculada en ATP/EMTP. D
falla
=196.81km.
A travs de un estudio en el que se simularon diferentes tipos de fallas a diferentes distancias
de la lnea de transmisin (antes y despus de la compensacin serie), se concluye que la
compensacin serie fija no afecta la operacin del algoritmo de localizacin con filtro de
Secuencias.
6.2.3 Reconocimiento de Patrones (Funcin Compuesta).
Para analizar el comportamiento del algoritmo de funcin compuesta utilizando
reconocimiento de patrones (Correlacin / Distancia Euclidiana), se simula una falla A-G a
200km del relevador 1 del sistema de potencia de la Figura 6.2 con una compensacin serie
(f ile CS_SF.pl4; x-v ar t) m:SFI1
9,0 9,4 9,8 10,2 10,6 11,0 [ms]
-2500
-2000
-1500
-1000
-500
0
500
1000
1500
(f ile CS_SF.pl4; x-v ar t) m:DFALLA
6 8 10 12 14 16 [ms]
0
40
80
120
160
200
Capitulo 6. Efectos de la compensacin serie fija en algoritmos de onda viajera.
P.G.I .I .E
- 154 -
fija del 75%. La Figura 6.11 muestra la salida de la funcin de correlacin estndar. En la
Figura 6.12 se observa la salida de la funcin de distancia Euclidiana y en la Figura 6.13 se
muestra la salida de la funcin compuesta (Correlacin / Distancia Euclidiana).
Figura 6.11 Salida de la funcin de correlacin estndar.
Figura 6.12 Salida de la funcin de distancia Euclidiana.
Figura 6.13 Salida de la funcin Compuesta (Correlacin + Distancia Euclidiana).
La Figura 6.14 muestra la distancia a la falla calculada por el relevador en ATP/EMTP.
(f ile RPAT.pl4; x-v ar t) m:CORRE
22,5 23,0 23,5 24,0 24,5 25,0 25,5 26,0
[ms]
-1,2
-0,9
-0,6
-0,3
0,0
0,3
0,6
*10
9
(f ile RPAT.pl4; x-v ar t) m:DE
22,5 23,0 23,5 24,0 24,5 25,0 25,5 26,0
[ms]
0,5
0,8
1,1
1,4
1,7
2,0
(f ile RPAT.pl4; x-v ar t) m:FCE
22,5 23,0 23,5 24,0 24,5 25,0 25,5 26,0
[ms]
-800
-460
-120
220
560
900
*10
6
Capitulo 6. Efectos de la compensacin serie fija en algoritmos de onda viajera.
P.G.I .I .E
- 155 -
Figura 6.14 Distancia a la falla calculada en ATP/EMTP. D
falla
=195.58km
En todos los casos simulados el algoritmo mostr el mismo comportamiento que el obtenido
para una lnea de transmisin sin compensacin serie fija.
6.3 CONCLUSIONES DEL CAPTULO.
En este captulo se estudi el comportamiento de los algoritmos de deteccin, discriminacin
direccional, clasificacin y localizacin de fallas, analizados en captulos anteriores, ante
lneas de transmisin con compensacin serie fija.
Los algoritmos de deteccin, discriminacin direccional, clasificacin y de localizacin tipo D
con sincronizacin va GPS utilizan las funciones de discriminacin de Michels (d
f
y d
r
) para
realizar su funcin. La compensacin serie fija no afecta las seales d
f
y d
r
(Figuras 6.3-6.6),
por lo tanto, estos algoritmos no tienen problemas en su operacin independientemente de que
las lneas de transmisin cuenten con compensacin serie fija o no.
Por otra parte, los algoritmos de localizacin basados en Correlacin y Reconocimientos de
Patrones utilizan las seales S
1
y S
2
para determinar la distancia a la falla. En la Figura 6.15 se
observa una comparacin de las seales S
1
y S
2
para una lnea sin compensacin serie y
cuando se compensa con un factor de 0.75
(f ile RPAT.pl4; x-v ar t) m:DFCE
0 5 10 15 20 25 30 35 40
[ms]
0
40
80
120
160
200
Capitulo 6. Efectos de la compensacin serie fija en algoritmos de onda viajera.
P.G.I .I .E
- 156 -
Figura 6.15 Seales S
1
y S
2
con y sin compensacin serie.
La Figura 6.16 hace un comparativo del comportamiento de la funcin compuesta
(Correlacin / Distancia Euclidiana) en lneas con y sin compensacin serie. Ntese que la
compensacin serie fija no afecta en gran medida la salida de la funcin compuesta. Como
resultado de este estudio se puede concluir que el uso de compensacin serie fija no afecta el
desempeo de las tcnicas de localizacin de fallas basadas en Correlacin estndar o Funcin
compuesta (Correlacin / distancia Euclidiana).
Figura 6.16 Funcin compuesta (correlacin + distancia Euclidiana).
P.G.I .I .E - 157 -
CAPTULO 7
CONCLUSIONES, APORTACIONES Y
TRABAJOS FUTUROS.
7.1 INTRODUCCIN.
Los esquemas de proteccin basados en medicin de impedancia han demostrado su
confiabilidad por dcadas. Sin embargo, la velocidad de deteccin de fallas de estos
relevadores no se puede mejorar sin alterar las caractersticas de operacin del mismo.
Por otra parte, cuando sucede una falla en una lnea de transmisin se generan seales de alta
frecuencia conocidas como ondas viajeras, estas seales que se propagan aproximadamente a
velocidad de la luz proveen informacin acerca del disturbio (direccin de la falla, tipo de
falla, ngulo de insercin y su localizacin) y se pueden utilizar para detectar y liberar fallas
de manera muy rpida (menor a un cuarto de ciclo).
En esta tesis se analiz la confiabilidad de los esquemas de proteccin de lneas de transmisin
de EHV basado en ondas viajeras. Para ello se programaron algoritmos de deteccin,
discriminacin direccional, clasificacin de tipo de falla y de localizacin de fallas en lneas de
transmisin basados en Ondas Viajeras: Filtro de secuencias, Localizador tipo D con
sincronizacin va GPS, Correlacin estndar, Correlacin auxiliar, Reconocimiento de
Captulo 7. Conclusiones, Aportaciones y Trabajos futuros.
P.G.I .I .E
- 158 -
patrones (Distancia de Manhattan, Distancia Euclidiana y Funcin Compuesta). La
programacin de dichos algoritmos se realiz en MODELS de ATP/EMTP. Posteriormente, se
hicieron diversos estudios para determinar el comportamiento de los algoritmos ante diferentes
condiciones de falla, como lo son: bajo ngulo de insercin, alta resistencia de falla y fallas
que suceden cerca al relevador o en el bus remoto. Lo anterior condujo a una serie de
conclusiones que a continuacin se mencionan.
7.2 CONCLUSIONES GENERALES.
Los algoritmos de deteccin y discriminacin direccional fueron analizados en dos sistemas
elctricos de potencia (Figuras 3.10 y 3.14), en los cuales operaron correctamente ante todas
las situaciones de falla a las que fueron sometidos.
En el captulo 5 se hizo un anlisis de los algoritmos de localizacin ante distintas condiciones
de falla para analizar su confiabilidad. Como resultado de este estudio se concluye que el
localizador tipo D con sincronizacin va GPS puede usarse como relevador primario ya que
es confiable, rpido y sencillo de programar. Por otra parte presenta una respuesta confiable
ante bajos ngulos de insercin de la falla, alta resistencia de falla y ante fallas que suceden
cerca de la posicin del relevador, sin embargo, como desventaja puede mencionarse que
requiere de un canal de comunicacin y sincronizacin va GPS, lo cual provoca que si por
algn motivo alguno de los relevadores no opera correctamente o existe un error en la
comunicacin de los relevadores o en la sincronizacin de los mismos, la lnea de transmisin
puede quedar desprotegida. Debido a los inconvenientes antes mencionados, se requiere de un
esquema de proteccin que actu como respaldo del sistema de proteccin primario, este
sistema podra estar basado en la funcin de correlacin auxiliar o en reconocimiento de
patrones ya que de los algoritmos analizados, stos presentaron los mejores resultados.
Las simulaciones llevadas a cabo en un sistema de potencia trifsico de 400kV demostraron
que el relevador basado en ondas viajeras no solo mejora la rapidez de deteccin de fallas,
sino que tambin mantiene un nivel de confiabilidad aceptable.
Captulo 7. Conclusiones, Aportaciones y Trabajos futuros.
P.G.I .I .E
- 159 -
Por otra parte, en algunas lneas de transmisin se conectan capacitores serie para disminuir la
reactancia total de la lnea con el propsito de aumentar la transferencia de potencia en lneas
de enlace. Esta situacin provoca cambios de impedancia equivalente de la lnea de
transmisin y por ello fue necesario evaluar el impacto de la reactancia capacitiva en el
comportamiento de los algoritmos de proteccin basados en ondas viajeras. Sin embargo, a
travs de este anlisis se concluye que la compensacin serie no causa un efecto significante
sobre las ondas viajeras ya que el relevador de onda viajera hace su decisin antes que opere la
proteccin del compensador serie. Por otra parte, las seales transitorias de alta frecuencia
ven al capacitor como un corto circuito y por lo tanto las seales de onda viajera no se ven
afectadas.
7.3 APORTACIONES REALIZADAS.
A continuacin se presentan las principales aportaciones y contribuciones de este trabajo de
tesis:
Se utiliz el comando power_lineparamde MATLAB para obtener los parmetros
elctricos (RLC) de la lnea de transmisin lo cual permite reducir tiempo en el clculo
de los mismos.
Se hizo un anlisis de la capacidad de deteccin de fallas de los modos de tierra y
areos de las matrices de transformacin de Clarke, Karrenbauer y Wedephol,
obtenindose como resultado la Tabla 3.1, en la que se observa que es necesario
utilizar los dos modos areos (de cualquier matriz de transformacin) para detectar el
total de las posibles fallas que se pudieran presentar.
Se desarroll un algoritmo de clasificacin de tipo de falla con el propsito de
implementar un esquema de re-cierre monopolar. Estos esquemas son altamente
deseables en sistemas dbiles donde una desconexin de las tres fases puede provocar
Captulo 7. Conclusiones, Aportaciones y Trabajos futuros.
P.G.I .I .E
- 160 -
perdida de sincronismo en los generadores. Gran parte de las fallas que ocurren en las
lneas de transmisin son fallas monofsicas temporales, en estos casos existe la
posibilidad de identificar la fase fallada en la lnea de transmisin y desconectar solo
esa fase, esto permite que las otras dos fases continen transfiriendo energa elctrica,
una vez que la falla ha desaparecido se cierra la fase previamente desconectada. El uso
de esquemas basados en ondas viajeras reduce considerablemente el tiempo de
clasificacin lo cual mejora la continuidad del servicio elctrico e incrementa la
estabilidad transitoria del sistema. Los resultados obtenidos por las simulaciones en
ATP/EMTP muestran que el algoritmo clasific correctamente el 100% de las fallas
simuladas, independientemente del ngulo de insercin y de la impedancia de la
misma, por otra parte es ms rpido que otros algoritmos existentes ya que con una
sola muestra es capaz de clasificar el tipo de falla ocurrida, excepto para fallas AB-G,
AC-G y BC-G donde se requiere una ventana de muestras.
Se desarroll un algoritmo de localizacin de fallas basado en el principio de operacin
del Localizador tipo D con sincronizacin va GPS, pero que nicamente utiliza
muestras de corriente para determinar si la falla es interna o externa y obtener la
localizacin de la misma.
Se analiz la respuesta de los algoritmos de localizacin de fallas en una lnea de
transmisin con compensacin serie fija, concluyndose que sta no afecta la
operacin de los mismos.
7.4 RECOMENDACIONES PARA TRABAJOS FUTUROS.
En esta seccin se presentan algunas recomendaciones para trabajos futuros:
Investigar el comportamiento de los algoritmos de localizacin en lneas de
transmisin multicircuito.
Captulo 7. Conclusiones, Aportaciones y Trabajos futuros.
P.G.I .I .E
- 161 -
Analizar los algoritmos en lneas de transmisin que utilicen dispositivos de
electrnica de potencia (FACTS) para llevar a cabo algn tipo de compensacin.
Investigar la reinsercin del banco de capacitores serie despus de una falla para
determinar su efecto en el relevador de ondas viajeras.
Por ltimo se sugiere desarrollar un algoritmo de una sola terminal que utilice
nicamente las ondas viajeras de corriente para localizar la falla. Lo anterior se
propone debido a que en lneas de transmisin de EHV, el voltaje se mide utilizando
transformadores de voltaje capacitivos (CVT). Todos estos transductores tienen un
ancho de banda limitado especialmente el CVT el cual tiene un ancho de banda de
1kHz. Por lo tanto las seales de voltaje medias por estos transductores pueden no
incluir seales transitorias de alta frecuencia. Sin embargo, los transformadores de
corriente tienen un ancho de banda de cientos de Kilohertz.
P.G.I .I .E - 162 -
APNDICE A
CONFIGURACIN Y PARMETROS DE LA
LNEA DE TRANSMISIN.
Este apndice muestra la configuracin de la lnea de transmisin y los parmetros de los
conductores e hilos de guarda empleados para modelar los sistemas de los captulos 3-6.
Tambin se obtienen los parmetros elctricos de la lnea de transmisin (impedancia
caracterstica y velocidad de propagacin) haciendo uso del comando power_ lineparamde
Matlab.
La Figura A.1 y la Tabla A.1 muestran la configuracin de la lnea de transmisin.
Figura A.1 Configuracin de la Lnea de transmisin.
Apndice A. Configuracin y Parmetros de la Lnea de Transmisin.
P.G.I .I .E
- 163 -
Tabla A.1 Circuito en arreglo Horizontal, LT A3230 ATN-MNZ, 180 km
Fase X (m)
Ytorre
(m)
Yclaro
(m)
Separacion
(cm)
Angulo
(grad) NC
Conductor
Hilo de Guarda
Rcd
(Ohm/km)
HG1 -8.65 34.34 23.00 - - - - - - - - -
Acero galv. 1 x 7#8
AWG 1.463
HG2 8.65 34.34 23.00 - - - - - - - - -
Acero galv. 1 x 7#8
AWG 1.463
A
-
10.50 25.00 12.50 45.0 0.0 2 ACSR 2-1113 kCM 0.050853
B 0.00 25.80 13.30 45.0 0.0 2 ACSR 2-1113 kCM 0.050853
C 10.50 25.00 12.50 45.0 0.0 2 ACSR 2-1113 kCM 0.050853
Las Tablas A.2 y A.3 muestran los parmetros elctricos de los conductores e hilos de guarda,
respectivamente.
Tabla A.2 Caractersticas de conductores ACSR utilizados en las lneas de transmisin.
Calibre
Dimetro
(cm)
Dimetro
Acero (cm) t/D (cm)
Rcd (20C)
Ohm/km
Radio
(cm)
Radio
Acero (cm)
1113 kCM 3.198 1.197 0.31285 0.0513 1.5990 0.5985
Tabla A.3 Caractersticas de cables de guarda de acero galvanizado
Calibre
Dimetro
(cm) t/D
Rcd (20C)
Ohm/km
Radio
(cm) Comentario
CG 7#8 0.978 0.5 1.463 0.4890 ESP. CFE
A.1 CLCULO DE PARMETROS ELCTRICOS DE LA LNEA DE
TRANSMISIN EN MATLAB USANDO POWER_LINEPARAM.
Al teclear en la ventana command window de Matlab el comando power_lineparamaparece
la ventana de la Figura A.2. En esta ventana se introduce la configuracin de los conductores
e hilos de guarda de la lnea de transmisin, as como los parmetros elctricos de los mismos,
posteriormente se da click en el botn Compute RLC line parameters, con lo cual se calculan
los parmetros elctricos de la lnea (Figura A.3).
Apndice A. Configuracin y Parmetros de la Lnea de Transmisin.
P.G.I .I .E
- 164 -
Figura A.2 Introduccin de los parmetros de la lnea en el GUI Power_lineparam
Figura A.3 Parmetros elctricos de la lnea de transmisin.
Apndice A. Configuracin y Parmetros de la Lnea de Transmisin.
P.G.I .I .E
- 165 -
Modo de Propagacin 0
Utilizando la inductancia y la capacitancia de secuencia cero (Figura A.3) podemos calcular la
impedancia caracterstica de la lnea de transmisin y la velocidad de propagacin de las ondas
viajeras:
Ohms
km / seg
Modo de Propagacin 1
De igual forma que para el modo anterior, utilizando la inductancia y la capacitancia de
secuencia positiva podemos calcular la impedancia caracterstica de la lnea de transmisin y
la velocidad de propagacin de las ondas viajeras:
Ohms
km / seg.
009 - 7.6834e
0.0028654
0
0
0
= =
C
L
Z
610.6831
0
= Z
( ) ( ) 009 - 7.6834e * 0.0028654
1 1
0 0
= =
C L
Vp
213123 = Vp
301.5246
1
= Z
( ) ( ) 008 - 1.134e * 0.001031
1 1
= =
LC
Vp
292460 = Vp
008 - 1.134e
0.001031
1
1
1
= =
C
L
Z
P.G.I .I .E - 166 -
APNDICE B
MODELADO DE LNEAS DE TRANSMISIN Y FALLAS EN
SISTEMAS ELCTRICOS DE POTENCIA EN ATP/EMTP.
B.1 INTRODUCCIN.
ATP - EMTP (Alternative Transients Program Electromagnetic) es una herramienta de
software que permite llevar a cabo la simulacin digital de fenmenos transitorios de
naturaleza electromagntica y electromecnica con fines de diseo, especificaciones de equipo
o definicin de parmetros elctricos fundamentales. Mediante ste Software es posible
plantear y resolver la mayor parte de las situaciones que se puedan dar en las diferentes
instalaciones elctricas. Se trata de una herramienta especialmente diseada para analizar,
tanto en su individualidad como en su conjunto, los diferentes elementos que conforman un
sistema elctrico, as como los sistemas de control asociados a los equipos elctricos. Algunas
de las aplicaciones para las que resulta especialmente til ATP son las siguientes:
Sobretensiones atmosfricas, temporales y de maniobras.
Anlisis de fallas.
Anlisis de armnicos.
Conexin / Desconexin de transformadores, reactancias y condensadores.
Arranque de motores.
Estabilidad transitoria
Coordinacin de aislamiento.
Anlisis y ensayo de protecciones.
Apndice B. Modelado de la Lnea de Transmisin en ATP/EMTP.
P.G.I .I .E
- 167 -
Transporte en corriente continua.
Compensadores estticos de Potencia Reactiva: STATCOM, SVC, UPFC, TCSC.
Ferro resonancias.
Regimenes estacionarios sinusoidales, incorporando tanto elementos lineales como no
lineales.
C.2 MODELADO DE LNEAS DE TRANSMISIN EN ATP/EMTP
LCC - Lines Constants. Es una subrutina de apoyo que se encarga de los clculos de los
parmetros elctricos de lneas areas a partir de las dimensiones de la torre, de las
caractersticas del conductor y de la disposicin del conductor sobre dicha torre.
Al dar click derecho sobre la ventana de ATP/EMTP aparece la ventana de la Figura B.1a, si
se selecciona Lines/Cables y posteriormente LCC se obtiene el icono de la lnea de
transmisin (Figura B.1b).
a) b)
Figura B.1 Subrutina LCC Lneas Constants
La Figura B.2 muestra una ventana de datos que aparece dar doble click izquierdo sobre el
icono LCC (Figura B.1b). Esta ventana de datos tiene dos pestaas: Model y Data, en las que
se introducen, entre otros datos, las unidades de longitud a utilizar, el largo de la lnea de
transmisin, el modelo de la lnea y la configuracin de la misma.
Apndice B. Modelado de la Lnea de Transmisin en ATP/EMTP.
P.G.I .I .E
- 168 -
Pestaa Model
Figura B.2 Pestaa Model
System type.
Los datos incluidos en este recuadro se deben definir en primer lugar (Figura B.2), ya que
el resto de la informacin a especificar en las dos pestaas que componen la ventana vara
en funcin del tipo de elemento.
Dado que se va a trabajar con una lnea area, en el men desplegable se
selecciona la opcin Overhead Line.
#Ph: Se define el nmero de fases, siendo 3 para una lnea trifsica de un
solo circuito.
Transposed: Se selecciona si se trata de una lnea transpuesta.
Auto bundling: Se activa para indicar que algunos de los conductores son
mltiples.
Skin effect: Se activa para incluir en el clculo el coeficiente Skin.
Segment ground: solo se selecciona cuando el cable de tierra esta puesto a
tierra por segmento y no de modo continuo.
Units: Se seleccionan las unidades mtricas o inglesas, segn se desee.
Apndice B. Modelado de la Lnea de Transmisin en ATP/EMTP.
P.G.I .I .E
- 169 -
Standart data.
Rho(ohm*m): Resistividad del terreno en ohm/m.
Frec. Init (Hz): Frecuencia para la cual deben ser calculados los
parmetros del modelo (Bergeron y PI) o frecuencia mnima para el ajuste
de los parmetros del modelo (opciones Jmarti, Noda y Semlyen).
Length (km): Longitud de la lnea.
Model.
En este recuadro se debe especificar el modelo con el que se quiere
representar el elemento e indicar una serie de datos relativos al mismo, que
varan en funcin del modelo escogido.
Type: Bergeron, PI, Jmarti, Noda y Semlyen.
JAMARTI Esta subrutina genera el modelo de onda viajeras, valido para
lneas areas y cables subterrneos.
Pestaa Data
Figura B.3 Pestaa Data
Add row: Aade conductores o hilos de guarda.
Ph. no: Numero de la fase a que hace referencia dicho conductor.
Rin: Radio interior del conductor.
Apndice B. Modelado de la Lnea de Transmisin en ATP/EMTP.
P.G.I .I .E
- 170 -
Rout: Radio exterior del conductor.
Resis: Resistencia del conductor.
Horiz: Distancia horizontal desde el centro del conductor o haz de
conductores hasta una referencia vertical comn.
Vtower: Distancia vertical desde el centro del conductor o haz de
conductores hasta el suelo, tomada en el propio apoyo.
Vmid: Distancia vertical desde el centro del conductor o haz de
conductores hasta el suelo, tomada en el punto medio del vano.
Internamente, el programa trabaja tomando como altura media del
conductor el valor:
Separ: Distancia entre los conductores que componen el haz.
NB. Nmero de conductores que componen el haz.
Alpha: ngulo respecto a la horizontal de uno de los conductores que
componen el haz.
En las Figuras B.4 y B.5 se muestra el modelo de la lnea de transmisin de la Figura A.1 y los
datos definidos en las pestaas Model y Data.
Figura B.4 Parmetros de la Lnea de Transmisin (Model)
Vtower Vmid h + =
3
1
3
2
Apndice B. Modelado de la Lnea de Transmisin en ATP/EMTP.
P.G.I .I .E
- 171 -
Figura B.5 Parmetros de la Lnea de Transmisin (Data)
B.3 MODELADO DE FALLAS EN LNEAS DE TRANSMISIN.
La Figura B.6 muestra el modelo creado en ATP/EMTP de un sistema de potencia en el que se
simula una falla monofsica A-G a 60km de la posicin del relevador.
Figura B.6 Falla simulada en ATP/EMTP.
La Figura B.7 muestra las propiedades del interruptor controlado por tiempo, donde T-cl es el
tiempo en que el interruptor cierra y T-op es el tiempo en que abre el interruptor. En este
ejemplo el interruptor inicialmente est abierto y cierra en t=0.0335 seg provocando una falla
A-G. El interruptor permanece cerrado el resto de la simulacin (70ms) y se abrira hasta
t=1seg.
Apndice B. Modelado de la Lnea de Transmisin en ATP/EMTP.
P.G.I .I .E
- 172 -
Figura B.7 Propiedades del Interruptor (switch) en ATP/EMTP.
La Figura B.8 muestra el comportamiento de los voltajes en el punto de falla. Ntese que la
falla sucede en la fase A justo cuando est en su nivel positivo mximo, por lo que se dice que
el ngulo de insercin de la falla es de 90 (POW=90).
Figura B.8 Voltajes en fases A, B y C medidos en el punto de falla.
La Figura B.9 muestra los distintos tipos de fallas utilizados para analizar el comportamiento
de los relevadores de onda viajera.
Figura B.9 Diferentes tipos de fallas simuladas en ATP/EMTP.
Apndice B. Modelado de la Lnea de Transmisin en ATP/EMTP.
P.G.I .I .E
- 173 -
B.4 MODELS
MODELS es un lenguaje de programacin que se usa en ATP/EMTP para simular variables
dependientes del tiempo con caractersticas especiales. Los ficheros MODELS se crean de
forma independiente al programa principal, su estructura es similar al de otros lenguajes de
programacin.
En este trabajo se utiliz MODELS para programar los distintos relevadores de Onda
Viajera. El relevador toma los voltajes y corrientes de la lnea de transmisin, internamente
los procesa y aplica los algoritmos de deteccin, discriminacin direccional, clasificacin y
localizacin de la falla y posteriormente, de ser necesario, enva seales a los interruptores de
potencia para liberar la falla (Figura B.10)
Figura B.10 MODELS en ATP/EMTP.
P.G.I .I .E - 174 -
REFERENCIAS BIBLIOGRFICAS
[1] Antonio Gmez Expsito, Anlisis y operacin de sistemas de energa elctrica, 2002,
McGraw Hill.
[2] Miguel Martnez, Julio Martnez. "Clasificacin y Localizacin de Faltas, utilizando
Wavelets y Redes Neuronales". Noveno Congreso Hispano - Luso de Ingeniera
Elctrica. Marbella. Espaa. Junio-Julio 2005.
[3] Bo, Z.Q.; Redfern, M.A.; Weller, G.C. Positional protection of transmission line
using fault generated high frequency transient signals IEEE Transactions on Power
Delivery Volume: 15, Issue: 3, Jan 2000.
[4] Kawady T. Stenzel, J. Investigation of practical problems for digital fault location
algorithms based on EMTP simulation Transmission and Distribution Conference
and Exhibition 2002: Asia Pacific. IEEE/PES , Volume: 1 , 6-10 Oct. 2002, Pages:118-
123.
[5] D. Chanda, N. Kishore, A. Sinha. A Wavelet multiresolution analysis for location of
faults on transmission lines. Electrical Power and Energy Systems, Elsiever
publications. No 25. 2003. pp 59-69.
[6] M. Joorabian, S. Taleghani, R. Aggarwal. Achrate Fault Locator for EHV
transmission lines based on radial basis function neural networks. Electric Power
Systems Research. Publicacin Futura 2004.
[7] H. Ha, B. Zhang. A novel principle of single ended fault location technique for EHV
transmission lines. IEEE Transactions on Power Delivery. Vol.18, No 4, Octubre
2003. Pp. 1147-1153.
[8] Jiang, J.-A.; Chih-Wen Liu; Ching-Shan Chen. A novel adaptive PMU based
transmission-line relay-design and EMTP simulation results IEEE Transactions on
Power Delivery Volume: 17, Issue: 4, Jan 2002.
[9] Jiang, J.-A.; Ching-Shan Chen; Chih-Wen Liu A new protection scheme for fault
detection, direction discrimination, classification, and location in transmission lines
IEEE Transactions on Power Delivery Volume: 18, Issue: 1, Jan 2003
Referencias bibliogrficas.
P.G.I .I .E
- 175 -
[10] Jamali, S. A fast adaptive digital distance protection Seventh International
Conference on Developments in Power Protection 2001.
[11] Sachdev, M.S.; Sighu, T.S.; Ghotra, D.S. Implementation of an adaptive data window
technique in a distance relay Seventh International Conference on Developments in
Power Protection 2001.
[12] Fazio, G.; Lauropoli, V.; Muzi, F.; Sacerdoti, G. Variable-window algorithm for
ultra-high-speed distance protection IEEE Transactions on Power Delivery Volume:
18, Issue: 2, Jan 2003.
[13] Sidhu, T.S.; Ghotra, D.S.; Sachdev, M.S. An adaptive distance relay and its
performance comparison with a fixed data window distance relay IEEE Transactions
on Power Delivery Volume: 17, Issue: 3, Jan 2002.
[14] Eissa, M.M.; Malik, O.P. A novel approach for auto-reclosing EHV/UHV
transmission lines IEEE Transactions on Power Delivery Volume: 15, Issue: 3, Jan
2000.
[15] Dash, P.K.; Pradhan, A.K.; Panda, G. A novel fuzzy neural network based distance
relaying scheme IEEE Transactions on Power Delivery Volume: 15, Issue: 3, Jan
2000.
[16] Dash, P.K.; Pradhan, A.K.; Panda, G. Application of minimal radial basis function
neural network to distance protection IEEE Transactions on Power Delivery Volume:
16, Issue: 1, Year: Jan 2001.
[17] Venkatesan, R.; Balamurugan, B. A real-time hardware fault detector using an
artificial neural network for distance protection IEEE Transactions on Power
Delivery Volume: 16, Issue: 1, Year: Jan 2001.
[18] Li, Y.I.; Li, B.; Zhang, X.H.; He, J.L. An ANN-based distance protective relays of
transmission lines Seventh International Conference on Developments in Power
Protection 2001.
[19] Oleskovicz, M.; Coury, D.V.; Aggarwal, R.K. A complete scheme for fault detection,
classification and location in transmission lines using neural networks Seventh
International Conference on Developments in Power Protection 2001.
Referencias bibliogrficas.
P.G.I .I .E
- 176 -
[20] Segui, T.; Bertrand, P.; Guillot, M.; Hanchin, P.; Bastard, P. Fundamental basis for
distance relaying with parametrical estimation IEEE Transactions on Power Delivery
Volume: 15, Issue: 2, Year: Jan 2000
[21] Micheletti, R. Pieri, R. Walsh digital filters applied to distance protection
Instrumentation and Measurement Technology Conference, 2002. IMTC/2002.
Proceedings of the 19th IEEE page(s): 487-490 Volume: 1, 2002
[22] Jiang, J.-A.; Chih-Wen Liu; Ching-Shan Chen. A novel adaptive PMU based
transmission-line relay-design and EMTP simulation results IEEE Transactions on
Power Delivery Volume: 17, Issue: 4, Jan 2002.
[23] Jiang, J.-A.; Ching-Shan Chen; Chih-Wen Liu A new protection scheme for fault
detection, direction discrimination, classification, and location in transmission lines
IEEE Transactions on Power Delivery Volume: 18, Issue: 1, Jan 2003.
[24] Kim, C.H.; Kim, H.; Aggarwal, R.K.; Johns, A.T. Wavelet transform in the accurate
detection of high impedance arcing faults in high voltage transmission lines Seventh
International Conference on Developments in Power Protection 2001.
[25] Osman, A.H. Malik, O.P. Wavelet transform approach to distance protection of
transmission lines Power Engineering Society Summer Meeting, 2001. IEEE
07/15/2001 -07/19/2001, 2001 Location: Vancouver, BC , Canada .page(s): 115-120
vol.1
[26] Tadeusz Lobos, J. Rezmer. Wavelet Trasnforms for real time estimation of
trasmission line impedance under transient conditions Electrical Engineering 84
(2002) 63-70. Springer - Verlag 2002.
[27] A.T. Johns, S.K.Salman, Digital Protection for power Systems, Book, IEEE Power
Series vol.15. Published by: Peter Peregrinus Ldt., on behalf of the Institution of
electrical Engineer, London, United Kingdom, 1995.
[28] Chen, Z.; Bo, Z.Q.; Jiang, F.; Weller, G.; A fault generated high frequency current
transients based protection scheme for series compensated lines Power Engineering
Society Winter Meeting, 2000. IEEE , Volume: 3 , 23-27 Jan. 2000
Referencias bibliogrficas.
P.G.I .I .E
- 177 -
[29] Bo, Z.Q.; Weller, G.; Lomas, T.; Redfern, M.A. Positional protection of transmission
systems using Global Positioning System IEEE Transactions on Power Delivery
Volume: 15, Issue: 4, Year: Jan 2000
[30] Vasilic, S.; Kezunovic, M.; An improved neural network algorithm for classifying the
transmission line faults Power Engineering Society Winter Meeting, 2002. IEEE,
Volume: 2 , 27-31 Jan. 2002
[31] Youssef, O.A.S. Online applications of wavelet transforms to power system relaying
IEEE Transactions on Power Delivery Volume: 18, Issue: 4, Oct 2003.
[32] Wu, Q.H.; Zhang, J.F.; Zhang, D.J. Ultra-high-speed directional protection of
transmission lines using mathematical morphology IEEE Transactions on Power
Delivery Volume: 18, Issue: 4, Jan 2003
[33] Ernesto Vzquez-Martnez A travelling wave distance protection using principal
component analysis Journal of Electrical Power & Energy Systems, Volume 25, Issue
6, July 2003.
[34] M. Sanaye-Pasand1, H. Khorashadi-Zadeh2 Transmission Line Fault Detection &
Phase Selection using ANN IPST2003.
[35] A. Gopalakrishnan, M Kezunovic, S. McKenna. Fault Location using the distributed
parameter transmission line model IEEE Transactions on Power Delivery. Vol.15, No
4, Octubre 2000. 1169-1175.
[36] H. Ha, B. Zhang. A novel principle of single ended fault location technique for EHV
trasmisin lines. IEEE Transactions on Power Delivery. Vol.18, No 4, Octubre 2003.
1147-1153.
[37] Pathirana, V.; McLaren, P.G.; Dirks, E.; Investigation of a hybrid travelling
wave/impedance relay principle, Electrical and Computer Engineering, 2002. IEEE
CCECE 2002. Canadian Conference on , Volume:1 , 12-15 May 2002
[38] Pathirana, V.; Dirks, E.; McLaren, P.G. Using impedance measurement to improve
the reliability of traveling-wave distance protection. Power Engineering Society
General Meeting, 2003, IEEE , Volume: 3 ,Julio 2003. pp 1874-1879.
Referencias bibliogrficas.
P.G.I .I .E
- 178 -
[39] D. Chanda, N. Kishore, A. Sinha. A Wavelet multiresolution analysis for location of
faults on transmission lines. Electrical Power and Energy Systems, Elsiever
publications. No 25. 2003. pp 59-69.
[40] A. Pradhan, A. Routary. Wavelet Fuzzy Combined Approach for fault classification
of a series compensated transmission line. IEEE Transaction on Power Delivery.
2004.
[41] Cheong, W.J.; Aggarwal, R.K. Accurate fault location in high voltage transmission
systems comprising an improved thyristor controlled series capacitor model using
wavelet transforms and neural network Transmission and Distribution Conference
and Exhibition 2002: Asia Pacific. IEEE/PES , Volume: 2 Oct. 2002 Pages:840 845.
[42] T. Takagi, J. Baba, K. Uemura and T. Sakaguchi, Fault protection based on travelling
wave theory part I: Theory, 1977 Summer Power meeting, Mexico City, July 17-22,
paper No. A77750-3
[43] H. W. Dommel and J. M. Michels High speed relaying using travelling waves
transient analysis, 1978 Winter Power Meeting, New York, N.Y. January 29
February 3, paper No. A78214-9.
[44] P.A Crossley y P.G. McLaren, Distance protection based on traveling waves IEEE
transaction on Power Apparatus and Systems, vol P AS 102, September 1983, pp.
272-279.
[45] E. H. Shehab-Eldin, P. G. Mclaren, Travelling wave distance protection Problem
areas and solutions,IEEE Trans. Power Del., vol. 3, no. 3, pp. 894-902, July 1988.
[46] A. Phadke, J. Thorp. Computer Relaying for Power Systems. Research Studies Press
LTD.,1988.
[47] Jie Liang, S. Elangovan, Pattern recognition technique for travelling wave
protection. Department of Electrical Engineering, National University of Singapore,
1998.
[48] H. S. Sidhu, High speed digital protection of EHV Transmission Lines using traveling
Waves, MS Thesis. Saskatchewan Canada, April 2004.
Referencias bibliogrficas.
P.G.I .I .E
- 179 -
[49] Pathirana, V.; McLaren, P.; A hybrid algorithm for high speed transmission line
protection, Power Engineering Society General Meeting, 2006. IEEE 18-22 June
2006 Page(s):1 pp.
[50] E. H. Eldin, P. G. Mclaren, Travelling wave distance protection problem areas and
solutions, University Engineering Department, Trumpington Street Cambridge, U. K.
IEEE Power System Relaying Commite of the IEEE Power Engineering Society. New
Orlands, Lousiana February 1987.
[51] Milton D. Huesca Amador, Modelado de lneas de transmisin, ITM-PGIIE, 2006.
[52] Vajira Pathirana, A power system protection scheme combining impedance
measurement and travelling waves: software and hardware implementation, Thesis
PhD. The University of Manitoba, 2004.
[53] MATLAB, The Language of Technical Computing. Version 7..0.0.19920 (R14). doc
Power_linparam.
[54] Csar Alexis Equihua Villegas, Modelado del relevador de onda viajera en ATP,
tesis M.C, Instituto Tecnolgico de Morelia, 2007.
[55] Gale, P.F.; Crossley, P.A.; Xu Bingyin; Ge Yaozhong; Cory, B.J.; Barker, J.R.G.;
Fault location based on travelling waves, Developments in Power System Protection,
1993., Page(s):54 59
[56] Travelling wave and Ultra High Speed (UHS) Relays. Notas de aplicacin.
[57] Harry Lee, Development of an accurate transmission line fault locator using the
Global Position System Satellites, B.C Hydro and Power Authority. Burnaby, B.C.
Canada.
[58] J. Liang, S. Elangovan and J. Devotta, "Adaptive Travelling Wave Protection
Algorithm Using Two Correlation Functions", IEEE Transactions on Power Delivery,
Vol. 14, No. 1, Jan 1999, pp. 126-131.
[59] J. H. Tovar Hernndez "Control de voltaje y potencia reactiva", ITM, PGIIE. Notas de
aplicacin.
Você também pode gostar
- Implementaci N de Equipos Detectores de Falla en El Sistema El Ctrico de Distribuci N de La TroncalDocumento25 páginasImplementaci N de Equipos Detectores de Falla en El Sistema El Ctrico de Distribuci N de La TroncalDiego Cabrera CseAinda não há avaliações
- Protección líneas ATDocumento5 páginasProtección líneas ATJaime SalazarAinda não há avaliações
- Protección de SEPDocumento3 páginasProtección de SEPReinaldoJesusChiloAcrotaAinda não há avaliações
- Ejercicio. FallasDocumento826 páginasEjercicio. FallasauraAinda não há avaliações
- Brochure - Diplomado Coordinación de Protecciones y Análisis de Fallas en Sep S Con Uso de SoftwareDocumento5 páginasBrochure - Diplomado Coordinación de Protecciones y Análisis de Fallas en Sep S Con Uso de SoftwareKenny Larrea CarrascoAinda não há avaliações
- 04 - Funciones Generales - 2019Documento40 páginas04 - Funciones Generales - 2019iemmortizAinda não há avaliações
- Diseño de Subestaciones de Media Tensión Tesis 2009Documento80 páginasDiseño de Subestaciones de Media Tensión Tesis 2009Raul Mayorga67% (6)
- Protección de Sistemas Eléctricos PDFDocumento664 páginasProtección de Sistemas Eléctricos PDFGodofredo ChAinda não há avaliações
- Paper Nicole SolorzanoDocumento11 páginasPaper Nicole SolorzanoNicoleAinda não há avaliações
- Ups GT003458Documento9 páginasUps GT003458leo2014sanchzAinda não há avaliações
- E1 083 Unac PDFDocumento10 páginasE1 083 Unac PDFPool Martinez AlejandroAinda não há avaliações
- Perfil de Proyecto de AsipoDocumento11 páginasPerfil de Proyecto de AsipoVilcazan Huayta JuanAinda não há avaliações
- Antenas y Propagacion PDFDocumento163 páginasAntenas y Propagacion PDFLuis Enrique Gomez Montaña100% (1)
- Metodos para Deteccion de FallasDocumento3 páginasMetodos para Deteccion de Fallasmario abalAinda não há avaliações
- Proteccion de Sistemas ElectricosDocumento664 páginasProteccion de Sistemas ElectricosIsaac Diaz100% (3)
- Tecnologia de Los Dispositivos - Manuel AlvarezDocumento345 páginasTecnologia de Los Dispositivos - Manuel AlvarezProf.Ángel MartínezAinda não há avaliações
- Curso ATP Análisis transitorios sistemas potenciaDocumento9 páginasCurso ATP Análisis transitorios sistemas potenciaPablo BravoAinda não há avaliações
- Guia Practicas 01Documento24 páginasGuia Practicas 01vlady33Ainda não há avaliações
- Informe de CortocircuitosDocumento12 páginasInforme de CortocircuitosAlejandro Ramirez BenitesAinda não há avaliações
- Tesis Pade-Matlab PDFDocumento63 páginasTesis Pade-Matlab PDFJaol1976Ainda não há avaliações
- Cursos presenciales de sistemas eléctricos, protecciones y líneas de transmisiónDocumento10 páginasCursos presenciales de sistemas eléctricos, protecciones y líneas de transmisiónJesus VilcazanAinda não há avaliações
- Apuntes ProteccionesDocumento169 páginasApuntes Proteccionescgalaz4285100% (1)
- PDFDocumento217 páginasPDFmayreneAinda não há avaliações
- ELECTRICIDADDocumento4 páginasELECTRICIDADanthobraAinda não há avaliações
- Monografía ArmonicosDocumento15 páginasMonografía ArmonicosJazmin Diaz TorresAinda não há avaliações
- Localizacion de Fallas en ConductoresDocumento33 páginasLocalizacion de Fallas en Conductoresmonorig88Ainda não há avaliações
- Protecciones Tesis PDFDocumento236 páginasProtecciones Tesis PDFJessica Paula Castillo UrrutiaAinda não há avaliações
- Paquete 03Documento10 páginasPaquete 03Dante Rovinzon Ramirez MontenegroAinda não há avaliações
- Diseno de Sistema ElectroicoDocumento199 páginasDiseno de Sistema ElectroicoCarlo Solano RomeroAinda não há avaliações
- Articulo - Análisis Predictivo de Motores Por Medio de VibracionesDocumento7 páginasArticulo - Análisis Predictivo de Motores Por Medio de VibracionesCuenta De RespaldoAinda não há avaliações
- Clasificacion de La Proteccion de Distancia 21Documento18 páginasClasificacion de La Proteccion de Distancia 21Richard Ninasunta Guanoquiza100% (2)
- CP ST Práctica-2Documento5 páginasCP ST Práctica-2Steven PeñaAinda não há avaliações
- Protecciones Eléctricas (Teoría y Problemas) PDFDocumento159 páginasProtecciones Eléctricas (Teoría y Problemas) PDFRichard Cuenca CabreraAinda não há avaliações
- Guia de Preguntas de Repaso para EvaluaciónDocumento7 páginasGuia de Preguntas de Repaso para Evaluaciónjorge_ortega_3Ainda não há avaliações
- CFE Demandas 2006-05Documento98 páginasCFE Demandas 2006-05César ChagollánAinda não há avaliações
- Localización de Fallas Por Onda ViajeraDocumento11 páginasLocalización de Fallas Por Onda ViajeraRetratosDeMiVidaAinda não há avaliações
- Practica-1 ST 2022BDocumento5 páginasPractica-1 ST 2022BAngel GalloAinda não há avaliações
- Puesta en servicio protección diferencial de barras 87B GE B90 S.E. Nopala CFEDocumento124 páginasPuesta en servicio protección diferencial de barras 87B GE B90 S.E. Nopala CFErsantanaAinda não há avaliações
- MCSA y Análisis de Secuencia Negativa para Detección de Cortocircuito en el EstatorDocumento7 páginasMCSA y Análisis de Secuencia Negativa para Detección de Cortocircuito en el Estatorjose maria chavezAinda não há avaliações
- Jhon F Munera Analisis de Flujos de DispersionDocumento13 páginasJhon F Munera Analisis de Flujos de DispersionMAURICIO GIRALDOAinda não há avaliações
- 01 PROTECCION de Sistemas de PotenciaDocumento132 páginas01 PROTECCION de Sistemas de PotenciaVladimir Venegas MarinAinda não há avaliações
- SED PREPA10 Quinga JessicaDocumento4 páginasSED PREPA10 Quinga JessicaJesica QuingaAinda não há avaliações
- Protección de líneas eléctricas con redes neuronalesDocumento33 páginasProtección de líneas eléctricas con redes neuronalesAlex CampianAinda não há avaliações
- Fallas de Maquinas ElectricasDocumento2 páginasFallas de Maquinas ElectricasMiguel AnaluisaAinda não há avaliações
- Proyecto de ProteccionesDocumento12 páginasProyecto de ProteccionesFabian Arce RiosAinda não há avaliações
- Sistemas Eléctricos de Potencia PDFDocumento5 páginasSistemas Eléctricos de Potencia PDFalonsoAinda não há avaliações
- Guia - Practicas - 01 AtpDocumento27 páginasGuia - Practicas - 01 AtpMauricio Hernandez100% (1)
- Metodos de Localizacion de Fallas en Cables de PotenciaDocumento13 páginasMetodos de Localizacion de Fallas en Cables de PotenciasusanaAinda não há avaliações
- Protecciones Digitales Modulo IIDocumento255 páginasProtecciones Digitales Modulo IIlisusedAinda não há avaliações
- Ime 2108Documento403 páginasIme 2108Diego LezcanoAinda não há avaliações
- Protección en HVDCDocumento5 páginasProtección en HVDCxolraxAinda não há avaliações
- Modelo Eléctrico de Alimentacion FerroviariaDocumento172 páginasModelo Eléctrico de Alimentacion FerroviariaEsteban GonzalezAinda não há avaliações
- Análisis de Variaciones Rã¡pidas de Voltaje en Sistemas de Sub-Transmisiã N y Redes de Distribuciã NDocumento123 páginasAnálisis de Variaciones Rã¡pidas de Voltaje en Sistemas de Sub-Transmisiã N y Redes de Distribuciã NCristián MorenoAinda não há avaliações
- Coordinación de Protecciones de La Subestación Eléctrica SEAT Desbloqueado PDFDocumento115 páginasCoordinación de Protecciones de La Subestación Eléctrica SEAT Desbloqueado PDFPaul ReynaAinda não há avaliações
- Mantenimiento de redes eléctricas aéreas de baja tensión. ELEE0109No EverandMantenimiento de redes eléctricas aéreas de baja tensión. ELEE0109Ainda não há avaliações
- Montaje de redes eléctricas aéreas de alta tensión. ELEE0209No EverandMontaje de redes eléctricas aéreas de alta tensión. ELEE0209Nota: 4.5 de 5 estrelas4.5/5 (2)
- Fundamentos de sistemas de comunicaciones analógicasNo EverandFundamentos de sistemas de comunicaciones analógicasNota: 4.5 de 5 estrelas4.5/5 (5)
- Mantenimiento de redes multiplexadas. TMVG0209No EverandMantenimiento de redes multiplexadas. TMVG0209Nota: 5 de 5 estrelas5/5 (1)
- Límites y continuidad en cálculo diferencialDocumento15 páginasLímites y continuidad en cálculo diferencialNoe ApAinda não há avaliações
- Tesis AlcaideDocumento199 páginasTesis AlcaideNoe ApAinda não há avaliações
- Dominio e ImagenDocumento36 páginasDominio e ImagenNoe ApAinda não há avaliações
- AC003 Algebra Lineal PDFDocumento10 páginasAC003 Algebra Lineal PDFEduardo LozanoAinda não há avaliações
- Reporte Practica 3Documento8 páginasReporte Practica 3Noe ApAinda não há avaliações
- EspaciosLp Vol1Documento313 páginasEspaciosLp Vol1Noe ApAinda não há avaliações
- Reporte Exposicion Rectificador Controlado Visto Desde La FuenteDocumento15 páginasReporte Exposicion Rectificador Controlado Visto Desde La FuenteNoe ApAinda não há avaliações
- Quimica Analitica-Ejercicios TeoriaDocumento136 páginasQuimica Analitica-Ejercicios TeoriaruymanmujicaAinda não há avaliações