Você também pode gostar
- Ijciet Analysis of Simply Supported Reinforced Concrete Skew SlabsDocumento8 páginasIjciet Analysis of Simply Supported Reinforced Concrete Skew SlabsgandhiAinda não há avaliações
- Load Combinations - Etabs BuildingDocumento2 páginasLoad Combinations - Etabs BuildingLouisAinda não há avaliações
- Moment Redistribution Effects in BeamsDocumento13 páginasMoment Redistribution Effects in BeamstavialimAinda não há avaliações
- Chapter 3B - Bearing CapacityDocumento21 páginasChapter 3B - Bearing CapacitySnow YoshimaAinda não há avaliações
- Thermal Stresses and Movements in Bridges PDFDocumento54 páginasThermal Stresses and Movements in Bridges PDFMaitrabarun KarjeeAinda não há avaliações
- Courbon's Method of Lateral Load Distribution on Bridge DecksDocumento37 páginasCourbon's Method of Lateral Load Distribution on Bridge DecksGaurab100% (1)
- RSA Webinar 15 SETRA - Final - PPSXDocumento44 páginasRSA Webinar 15 SETRA - Final - PPSXSajid HanifAinda não há avaliações
- Stress Distribution Under LoadsDocumento25 páginasStress Distribution Under LoadsAbdul RehamanAinda não há avaliações
- Plastic Analysis Beams FramesDocumento49 páginasPlastic Analysis Beams FrameshbsheenAinda não há avaliações
- Static Bearing Capacity Equations for Driven Precast PileDocumento11 páginasStatic Bearing Capacity Equations for Driven Precast PileMostafizur RahmanAinda não há avaliações
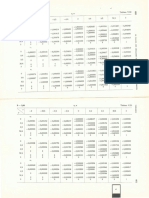
- Guyon-Massonnet Tableau 4Documento16 páginasGuyon-Massonnet Tableau 4Nassim ChaabiAinda não há avaliações
- Technology of Building: Institute of Technology of Cambodia Faculty of Civil EngineeringDocumento30 páginasTechnology of Building: Institute of Technology of Cambodia Faculty of Civil EngineeringKhum ViwathAinda não há avaliações
- High Skew Link Slab Bridge SystemDocumento165 páginasHigh Skew Link Slab Bridge SystemRelu-Razvan TibreaAinda não há avaliações
- Load CombinationsDocumento14 páginasLoad CombinationsHiren DesaiAinda não há avaliações
- Load Combinations For Serviceability Deflection CheckDocumento1 páginaLoad Combinations For Serviceability Deflection CheckRagavanAinda não há avaliações
- Base Isolation Part II - Design Eval LBR Isolator PDFDocumento7 páginasBase Isolation Part II - Design Eval LBR Isolator PDFtestAinda não há avaliações
- Matlav Tp2 FinalDocumento16 páginasMatlav Tp2 FinalSAN RAKSAAinda não há avaliações
- Sigrist, Hackbarth 3rd Fib International Congress - 2010Documento10 páginasSigrist, Hackbarth 3rd Fib International Congress - 2010mocker1987Ainda não há avaliações
- Pont Dalle en Ba Groupe Gci ADocumento20 páginasPont Dalle en Ba Groupe Gci Aken koemhongAinda não há avaliações
- Temperature Distribution in Concrete Bridge EC HamblyDocumento6 páginasTemperature Distribution in Concrete Bridge EC Hamblygks6043Ainda não há avaliações
- Load ComboDocumento7 páginasLoad ComboAnonymous ya6gBBwHJFAinda não há avaliações
- Moment RedistributionDocumento13 páginasMoment Redistributionprakashcg123Ainda não há avaliações
- Caltrans bridge deck construction manualDocumento211 páginasCaltrans bridge deck construction manualvigneshwarimahamuniAinda não há avaliações
- Deflections For Load Case D+LDocumento11 páginasDeflections For Load Case D+LEmmanuelAinda não há avaliações
- ពិន្ទុ Mécanique2 I2 V - 02Documento22 páginasពិន្ទុ Mécanique2 I2 V - 02Dim LifyAinda não há avaliações
- Skew PDFDocumento14 páginasSkew PDFsurangaAinda não há avaliações
- EBB 01 FrontCover 30May2013.Doc - Earthquakebehaviour06172017025353283Documento69 páginasEBB 01 FrontCover 30May2013.Doc - Earthquakebehaviour06172017025353283МембранингСтудиоAinda não há avaliações
- Knapsack Problems: I. HistoryDocumento7 páginasKnapsack Problems: I. HistoryHavisAinda não há avaliações
- UntitledDocumento268 páginasUntitledYONGSEOK CHOIAinda não há avaliações
- Faecal Sludge Management: Systems Approach For Implementation and OperationDocumento428 páginasFaecal Sludge Management: Systems Approach For Implementation and OperationYONGSEOK CHOIAinda não há avaliações
- Analysis and Comparative Study of Composite Bridge GirdersDocumento11 páginasAnalysis and Comparative Study of Composite Bridge GirdersIAEME PublicationAinda não há avaliações
- SE1M54 Unit 7 Presentation Global AnalysisDocumento15 páginasSE1M54 Unit 7 Presentation Global AnalysisPhilip Yap100% (1)
- Aenor 15620Documento77 páginasAenor 15620GlTaAinda não há avaliações
- PRESTRESSED CONCRETE BEAM DESIGNDocumento2 páginasPRESTRESSED CONCRETE BEAM DESIGNMary Joy BaggayAinda não há avaliações
- S Frame HandoutDocumento108 páginasS Frame HandoutMonal RajAinda não há avaliações
- SWD Aci 318 14Documento74 páginasSWD Aci 318 14Wilson Villalobos100% (1)
- Rigid or Flexible DiaphragmDocumento2 páginasRigid or Flexible DiaphragmManishAinda não há avaliações
- Webinar N°11 Robot Structural Analysis Professional and Advance Steel IntegrationDocumento41 páginasWebinar N°11 Robot Structural Analysis Professional and Advance Steel IntegrationSrdjan KosoricAinda não há avaliações
- Brief Review of TensorsDocumento15 páginasBrief Review of TensorsG Hernán Chávez LandázuriAinda não há avaliações
- Precast Concrete Manholes Strength & DurabilityDocumento2 páginasPrecast Concrete Manholes Strength & DurabilityHafiza Dhyantry RamadhiniAkmalAinda não há avaliações
- Lecture 10 - Introduction To Earthquake Resistant Design of RC Structures (Part II) ColorDocumento54 páginasLecture 10 - Introduction To Earthquake Resistant Design of RC Structures (Part II) Coloraizaz ahmadAinda não há avaliações
- Automated Solar Powered Pumping Systems For IrrigationDocumento10 páginasAutomated Solar Powered Pumping Systems For IrrigationfarizalAinda não há avaliações
- Tutorial StairsDocumento18 páginasTutorial StairsainsahAinda não há avaliações
- Eres17 Usb PapersDocumento275 páginasEres17 Usb Paperschachichach2Ainda não há avaliações
- Buckling Analysis: I. Definition and PurposeDocumento4 páginasBuckling Analysis: I. Definition and PurposeAnonymous 0LLPw3Ainda não há avaliações
- STRUCTURAL ANALYSIS ACE MCQssDocumento70 páginasSTRUCTURAL ANALYSIS ACE MCQssAndresDelaVegaAinda não há avaliações
- Webinar N°9 Results Connect, Robot API, DynamoDocumento43 páginasWebinar N°9 Results Connect, Robot API, DynamoSrdjan KosoricAinda não há avaliações
- EFNARC Spec and Guidelines For SCC Test Methods 2002Documento12 páginasEFNARC Spec and Guidelines For SCC Test Methods 2002Hugo Marín GonzálezAinda não há avaliações
- ST1 Manuel en Version 23Documento327 páginasST1 Manuel en Version 23Ashutosh Kumar SinghAinda não há avaliações
- Computer Aided Bridge Design WorkflowDocumento4 páginasComputer Aided Bridge Design WorkflowAriel HowardAinda não há avaliações
- 12 Ehe08Documento4 páginas12 Ehe08BojanaAinda não há avaliações
- Cal GaroDocumento41 páginasCal GarosalifsyAinda não há avaliações
- 2001 - Interaction Surfaces of Reinforced-Concrete Sections in Biaxial BendingDocumento7 páginas2001 - Interaction Surfaces of Reinforced-Concrete Sections in Biaxial Bendingryan rakhmatAinda não há avaliações
- Bridge TechnologyDocumento67 páginasBridge Technologythanzawtun1981Ainda não há avaliações
- En 1994 - Eurocode 4: Design ofDocumento24 páginasEn 1994 - Eurocode 4: Design ofchono_kolevAinda não há avaliações
- Cantilever Retaining Wall - Metric PDFDocumento16 páginasCantilever Retaining Wall - Metric PDFJebin JacobAinda não há avaliações
- Hyperstatic (Secondary) Actions in Prestressing and Their ComputationDocumento10 páginasHyperstatic (Secondary) Actions in Prestressing and Their ComputationAnh RdzAinda não há avaliações
- PT LOAD HyperstaticDocumento8 páginasPT LOAD HyperstaticJesus G.Ainda não há avaliações
- Structural DynamicsDocumento63 páginasStructural DynamicsthakrarhitsAinda não há avaliações
- Structural DynamicsDocumento63 páginasStructural DynamicsElena Baciu100% (3)
- Hydrology Principles Analysis DesignDocumento477 páginasHydrology Principles Analysis DesignCarel De Jager81% (16)
- Report TreatmentPond PDFDocumento10 páginasReport TreatmentPond PDFSérgio Dos SantosAinda não há avaliações
- Waste Stabilization Ponds and Constructed Wetlands Design ManualDocumento59 páginasWaste Stabilization Ponds and Constructed Wetlands Design ManualRaluca IustinaAinda não há avaliações
- IBRACON ADAPT Vibration Concrete Floors 060913 PDFDocumento12 páginasIBRACON ADAPT Vibration Concrete Floors 060913 PDFSérgio Dos SantosAinda não há avaliações
- ADAPT-Floor Pro 2010 ManualDocumento320 páginasADAPT-Floor Pro 2010 ManualCarlos AugustoAinda não há avaliações
- Shear Design in Floor Slabs: Technical NoteDocumento7 páginasShear Design in Floor Slabs: Technical NoteSérgio Dos SantosAinda não há avaliações
- ADAPT P201 Nonpre Bonded PT BLDG DSGN PDFDocumento12 páginasADAPT P201 Nonpre Bonded PT BLDG DSGN PDFSérgio Dos SantosAinda não há avaliações
- Caihe ch1Documento30 páginasCaihe ch1dwaraganathan100% (1)
- TestingPreviewReport - 11013 10 31 2019 - 12 16PM - 20191031121624Documento43 páginasTestingPreviewReport - 11013 10 31 2019 - 12 16PM - 20191031121624PIDCL WITH SUBUDHIAinda não há avaliações
- Plastic Processing OperatorDocumento51 páginasPlastic Processing OperatorRam Avtar DhariwalAinda não há avaliações
- Ansi Statandard Descripcion1Documento20 páginasAnsi Statandard Descripcion1rncc2011Ainda não há avaliações
- Application LetterDocumento3 páginasApplication LetterRangga Maulana ArrazyAinda não há avaliações
- ITEM NO. (Service) : Inspection Report Hot Oil Heater (Vertical On Ground)Documento2 páginasITEM NO. (Service) : Inspection Report Hot Oil Heater (Vertical On Ground)Alif Rahmat FebriantoAinda não há avaliações
- PLC SyllabusDocumento15 páginasPLC SyllabussivaeinfoAinda não há avaliações
- Introduction to Industrial Engineering and Management conceptsDocumento2 páginasIntroduction to Industrial Engineering and Management conceptschhetribharat080% (1)
- Jurnal 1Documento6 páginasJurnal 1Elok SorayaAinda não há avaliações
- EIM 6 Lesson 1Documento19 páginasEIM 6 Lesson 1Victor Rosales100% (1)
- Onion Cold Storage Facility Construction Program of WorksDocumento156 páginasOnion Cold Storage Facility Construction Program of Worksadrian tulabutAinda não há avaliações
- 4.6 - LSI - Power Aware Design VerificationDocumento25 páginas4.6 - LSI - Power Aware Design VerificationbrufoAinda não há avaliações
- UESI Presentation Webinar March 29 2016 PDFDocumento65 páginasUESI Presentation Webinar March 29 2016 PDFmunim87Ainda não há avaliações
- PM Fellowship Scheme for Doctoral ResearchDocumento47 páginasPM Fellowship Scheme for Doctoral ResearchHimanshu1712Ainda não há avaliações
- Mulungushi University announces 2022/2023 student loan upgradesDocumento4 páginasMulungushi University announces 2022/2023 student loan upgradesIzukanji KayoraAinda não há avaliações
- Investigation On The Mechanical Properties of 3D PDocumento13 páginasInvestigation On The Mechanical Properties of 3D PMd Jalal Uddin RumiAinda não há avaliações
- CE247 Policy and Syllabus Jan 29 08 BW FinalDocumento3 páginasCE247 Policy and Syllabus Jan 29 08 BW FinalrunkirAinda não há avaliações
- Cr-Mo API 934Documento13 páginasCr-Mo API 934Daniel Jimenez Merayo100% (1)
- 1 Introduction To Bridge EngineeringDocumento46 páginas1 Introduction To Bridge EngineeringRYAN JOSEPH QUIMOAinda não há avaliações
- ICE 3001A Routes To MembershipDocumento20 páginasICE 3001A Routes To MembershiprosavascoAinda não há avaliações
- ANNEX 5.1 - Manpower Mobilization ScheduleDocumento2 páginasANNEX 5.1 - Manpower Mobilization SchedulebaurzhannAinda não há avaliações
- Tesfa NegaDocumento4 páginasTesfa NegaAbraha AbadiAinda não há avaliações
- Guide For The Design & Installation of Services PDFDocumento155 páginasGuide For The Design & Installation of Services PDFDes100% (1)
- Shear Strength Reduction at Soil Structure InterfaceDocumento10 páginasShear Strength Reduction at Soil Structure InterfaceKasim BaručijaAinda não há avaliações
- Students Industrial Work Experience ScheDocumento16 páginasStudents Industrial Work Experience Schejoseph emmanuelAinda não há avaliações
- Application Edge-MV VFDs Acceptance TestingDocumento3 páginasApplication Edge-MV VFDs Acceptance TestingThọ NguyễnAinda não há avaliações
- Loyalist College Program Availability List For JAN - 2023 Intake 240522Documento6 páginasLoyalist College Program Availability List For JAN - 2023 Intake 240522Jayrajsinh ParmarAinda não há avaliações
- Electrical Equipment ListDocumento12 páginasElectrical Equipment ListShadab WaseemAinda não há avaliações
- Samsung Klima 2012 Katalogus Catalogue SACDocumento79 páginasSamsung Klima 2012 Katalogus Catalogue SACKadiri Olanrewaju0% (1)
- ISA - CAP Classification SystemDocumento16 páginasISA - CAP Classification SystemMiko QuijanoAinda não há avaliações
- SATR-J-6501 - Rev 0 PDFDocumento5 páginasSATR-J-6501 - Rev 0 PDFAdel KlkAinda não há avaliações