Você também pode gostar
- Laser Weapon System (LaWS)Documento9 páginasLaser Weapon System (LaWS)strumx7100% (1)
- De Constructing The Sukhoi PAK FA Su 50Documento74 páginasDe Constructing The Sukhoi PAK FA Su 50Nguyen Hong Minh100% (4)
- Navigating Weather: A Pilot's Guide to Airborne and Datalink Weather RadarNo EverandNavigating Weather: A Pilot's Guide to Airborne and Datalink Weather RadarAinda não há avaliações
- A2Z Telugu Boothu KathaluDocumento82 páginasA2Z Telugu Boothu KathaluBommalu60% (10)
- Important Facts and TriviaDocumento85 páginasImportant Facts and TriviaAlex HernandezAinda não há avaliações
- Transmision Power Shift ZF WGDocumento9 páginasTransmision Power Shift ZF WGjccla85% (34)
- 7mm MauserDocumento16 páginas7mm MauserJohn Anderson100% (3)
- SODAR ProfilersDocumento57 páginasSODAR ProfilersJose AlAinda não há avaliações
- Lacquered CoffinsDocumento42 páginasLacquered CoffinsThomas Herrlich100% (2)
- Bajiquan & Piguazhang Training MethodsDocumento29 páginasBajiquan & Piguazhang Training Methodsdiamond68100% (4)
- Military RadarDocumento20 páginasMilitary Radarrakesh100% (2)
- Nano Enabled Coating Makes Aircraft InvisibleDocumento29 páginasNano Enabled Coating Makes Aircraft InvisiblePankaj Sattawat50% (4)
- OTO Melara 76mm OTOmaticDocumento3 páginasOTO Melara 76mm OTOmaticScott_B4U100% (1)
- ForecastInternational - AIM-9X Sidewinder - F659 - CompleteSample PDFDocumento16 páginasForecastInternational - AIM-9X Sidewinder - F659 - CompleteSample PDFScott_B4UAinda não há avaliações
- PROPULSION E-Motors 300609-014459 PDFDocumento59 páginasPROPULSION E-Motors 300609-014459 PDFScott_B4U100% (1)
- Waveform Diversity and Electromagnetic Compatibility: Fig. 1. Airborne Intelligent Radar SystemDocumento6 páginasWaveform Diversity and Electromagnetic Compatibility: Fig. 1. Airborne Intelligent Radar SystemastefanovichAinda não há avaliações
- Recent Developments in Russian Radar SystemsDocumento7 páginasRecent Developments in Russian Radar SystemsDhimas Afihandarin100% (3)
- Concise Title for Military Radar System Presentation TranscriptDocumento5 páginasConcise Title for Military Radar System Presentation Transcriptajay100% (1)
- Aesa TechpaperDocumento17 páginasAesa TechpaperosmanriazAinda não há avaliações
- Revell Model Paint Color Guide 14 mlDocumento1 páginaRevell Model Paint Color Guide 14 mlPetros Karapappas100% (1)
- Which Kinds of Frigates For European Navies ?Documento24 páginasWhich Kinds of Frigates For European Navies ?Scott_B4U100% (1)
- 155-mm LRLAP 1211Documento2 páginas155-mm LRLAP 1211Scott_B4U100% (1)
- Military Radar SystemDocumento3 páginasMilitary Radar SystemEditor IJTSRDAinda não há avaliações
- Lasers in Electronic WarfareDocumento3 páginasLasers in Electronic Warfarebring it onAinda não há avaliações
- Rheinmetall - 120mm HE DM11 - DMI PDFDocumento2 páginasRheinmetall - 120mm HE DM11 - DMI PDFScott_B4U100% (1)
- 2007-05 JFSC Thesis Nfs and Ddg-1000Documento186 páginas2007-05 JFSC Thesis Nfs and Ddg-1000Scott_B4U100% (1)
- Sar Uav PDFDocumento24 páginasSar Uav PDFadityaAinda não há avaliações
- Lightweight: MP - M788 TP - M977 TP-T - M789 HedpDocumento2 páginasLightweight: MP - M788 TP - M977 TP-T - M789 HedpScott_B4UAinda não há avaliações
- Poongsan Ammo CatalogueDocumento50 páginasPoongsan Ammo CatalogueScott_B4UAinda não há avaliações
- Radar Spectrum Engineering and Management IssuesDocumento18 páginasRadar Spectrum Engineering and Management IssuesSry SantosAinda não há avaliações
- The Marine Corps CreedsDocumento2 páginasThe Marine Corps Creedsacts2and38Ainda não há avaliações
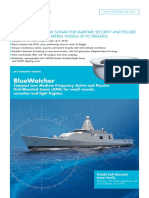
- Thales BlueWatcherDocumento2 páginasThales BlueWatcherScott_B4UAinda não há avaliações
- Next-Gen Multi-Mission Radar NetworkDocumento38 páginasNext-Gen Multi-Mission Radar NetworkHarshSharmaAinda não há avaliações
- Early Advances in Radar Technology For Aircraft Detection: Donald L. ClarkDocumento14 páginasEarly Advances in Radar Technology For Aircraft Detection: Donald L. Clarkmehran_eftekharAinda não há avaliações
- 1 ThompsonDocumento12 páginas1 ThompsonAnugunti SruthiAinda não há avaliações
- Inflatable Antenna Technology With Preliminary ShuDocumento7 páginasInflatable Antenna Technology With Preliminary ShudivyaAinda não há avaliações
- Ramirez Lee Kwon 2020 Appl SciDocumento21 páginasRamirez Lee Kwon 2020 Appl SciOmen JettAinda não há avaliações
- Summary of The Radar Calibration WorkshopDocumento3 páginasSummary of The Radar Calibration WorkshopMaxi GarzonAinda não há avaliações
- A UAV Detection Algorithm Based On An Artificial Neural NetworkDocumento9 páginasA UAV Detection Algorithm Based On An Artificial Neural NetworkanjulAinda não há avaliações
- Dual-Band Radar Development From Engineering to ProductionDocumento32 páginasDual-Band Radar Development From Engineering to ProductionMehul MakwanAinda não há avaliações
- SBIR GovDocumento4 páginasSBIR GovgrenzoAinda não há avaliações
- Comparative Analysis of Terminal Wind-Shear Detection Systems PerformanceDocumento11 páginasComparative Analysis of Terminal Wind-Shear Detection Systems PerformanceSii Olog-olog PlonkAinda não há avaliações
- Proceedings of Spie: Newer Aerial Platform For Emergency Response by The United States Department of EnergyDocumento11 páginasProceedings of Spie: Newer Aerial Platform For Emergency Response by The United States Department of EnergyAbdul MajidAinda não há avaliações
- RADAR SystemsDocumento8 páginasRADAR SystemsAlex BrenesAinda não há avaliações
- 10 1 1 148 4197Documento5 páginas10 1 1 148 4197kirancallsAinda não há avaliações
- Libre 1Documento2 páginasLibre 1Adolf MartinAinda não há avaliações
- Performance Evaluation of Seasonde High-Frequency Radar For Vessel DetectionDocumento11 páginasPerformance Evaluation of Seasonde High-Frequency Radar For Vessel DetectiondndosecAinda não há avaliações
- Analysis of Radar and ADS-B Influences On AircraftDocumento14 páginasAnalysis of Radar and ADS-B Influences On AircraftIsrrael Caceres MAinda não há avaliações
- Otc 23006Documento17 páginasOtc 23006Rasheed YusufAinda não há avaliações
- Micro Air Vehicles: Y.Sudheer, G.Naganna, Email: Mobile No: 9700508696 Mobile No: 7893156002Documento10 páginasMicro Air Vehicles: Y.Sudheer, G.Naganna, Email: Mobile No: 9700508696 Mobile No: 7893156002Srini VasuluAinda não há avaliações
- SABRaesawhitepaperDocumento17 páginasSABRaesawhitepaperJosé Luis DelgadoAinda não há avaliações
- LL ESAV2008 VersDocumento7 páginasLL ESAV2008 Versfariz amrilahAinda não há avaliações
- Drones 03 00038 v2Documento22 páginasDrones 03 00038 v2Adik Susilo WAinda não há avaliações
- Decentralized Perimeter Surveillance Using A Team of UavsDocumento11 páginasDecentralized Perimeter Surveillance Using A Team of UavsOM2019Ainda não há avaliações
- AGILE BEAM PHASED ARRAY RADAR FOR WEATHERDocumento41 páginasAGILE BEAM PHASED ARRAY RADAR FOR WEATHERKamaraj PandianAinda não há avaliações
- Autonomus Chemical-Sensing Aerial Robot For UrbanSuburban Environmental MonitoringDocumento12 páginasAutonomus Chemical-Sensing Aerial Robot For UrbanSuburban Environmental Monitoringdiazwarsenanto11Ainda não há avaliações
- Multifunction Phased Array Radar SymposiumDocumento5 páginasMultifunction Phased Array Radar SymposiumfaridshAinda não há avaliações
- Validation of The NATO-Standard Ship Signature Model (SHIPIR)Documento11 páginasValidation of The NATO-Standard Ship Signature Model (SHIPIR)mapache1111Ainda não há avaliações
- 2006 - Pehrsson Et Al - Volume Sensor For Damage Assessment and Situational AwarenessDocumento10 páginas2006 - Pehrsson Et Al - Volume Sensor For Damage Assessment and Situational AwarenessGustavo PragerAinda não há avaliações
- Displaced Phase Center Antenna TechniqueDocumento16 páginasDisplaced Phase Center Antenna Techniquednn2Ainda não há avaliações
- T8 B16 Misc Work Papers FDR - 3-18-03 Norad and 9-11 Radar Files by Miles Kara (Clipped W Reference Material)Documento16 páginasT8 B16 Misc Work Papers FDR - 3-18-03 Norad and 9-11 Radar Files by Miles Kara (Clipped W Reference Material)9/11 Document Archive100% (1)
- Nano Enabled Coating Makes Aircraft Invisible PDFDocumento30 páginasNano Enabled Coating Makes Aircraft Invisible PDFmritunjay1987100% (1)
- Development of A Generic Guidance Navigation & ControlDocumento24 páginasDevelopment of A Generic Guidance Navigation & ControlPradip SarkerAinda não há avaliações
- sandino_U2Documento14 páginassandino_U2OM SARDESAI225286Ainda não há avaliações
- An Overview of Radar Cross Section Measurement Techniques: Airplanes AIRDocumento3 páginasAn Overview of Radar Cross Section Measurement Techniques: Airplanes AIRiamnbroneAinda não há avaliações
- Svs Group of InstitutionsDocumento22 páginasSvs Group of InstitutionsRaj NagAinda não há avaliações
- Aplicaciones MilitaresDocumento4 páginasAplicaciones MilitaresMabel NúñezAinda não há avaliações
- Main Manuscript SubmittedDocumento40 páginasMain Manuscript SubmittedWilliam DeerAinda não há avaliações
- Sensors 18 04363Documento14 páginasSensors 18 04363UsdhdjdkAinda não há avaliações
- Micro-Drone For Gas Measurement in Hazardous Scenarios Via Remote SensingDocumento4 páginasMicro-Drone For Gas Measurement in Hazardous Scenarios Via Remote Sensingito300Ainda não há avaliações
- CALIPSO Lidar Description and Performance Assessment: OlumeDocumento15 páginasCALIPSO Lidar Description and Performance Assessment: Olumebitconcepts9781Ainda não há avaliações
- The CleoSim Radar SimulatorDocumento10 páginasThe CleoSim Radar SimulatorRoberto CostantiniAinda não há avaliações
- Chapter-1: 1.1 RADAR SystemsDocumento11 páginasChapter-1: 1.1 RADAR SystemsRajesh Kumar ChituproluAinda não há avaliações
- Frequency Spectrum For New Aviation Data Links: Initial Study ResultsDocumento51 páginasFrequency Spectrum For New Aviation Data Links: Initial Study Resultsstanpjames2309Ainda não há avaliações
- Preprints201808 0313 v1Documento12 páginasPreprints201808 0313 v1Abdul Hadi ButtAinda não há avaliações
- J1.10 Faa Surveillance Radar Data As A Complement To The Wsr-88D NetworkDocumento5 páginasJ1.10 Faa Surveillance Radar Data As A Complement To The Wsr-88D NetworkDai NgocAinda não há avaliações
- Review of The Evolution of Phased-Array RadarDocumento4 páginasReview of The Evolution of Phased-Array RadarSushmitha ThulasimaniAinda não há avaliações
- Radio Remote-Control and Telemetry and Their Application to MissilesNo EverandRadio Remote-Control and Telemetry and Their Application to MissilesNota: 4 de 5 estrelas4/5 (1)
- ARTY - Aubert Et Duval - Produits - Longs - GB PDFDocumento6 páginasARTY - Aubert Et Duval - Produits - Longs - GB PDFScott_B4UAinda não há avaliações
- VL Mica SeaDocumento2 páginasVL Mica SeaScott_B4UAinda não há avaliações
- 2006 03 06 Lockheed Martin Launches First of Two Slice R Crew Vessels For Transporting Workers To Mexican Offshore RigsDocumento2 páginas2006 03 06 Lockheed Martin Launches First of Two Slice R Crew Vessels For Transporting Workers To Mexican Offshore RigsScott_B4UAinda não há avaliações
- Ada394812 - Rah-66 Gun TurretDocumento19 páginasAda394812 - Rah-66 Gun TurretScott_B4UAinda não há avaliações
- Apache AH-64 30x113mm Target Practice SpotterDocumento17 páginasApache AH-64 30x113mm Target Practice SpotterScott_B4UAinda não há avaliações
- MV7000 Brochure enDocumento16 páginasMV7000 Brochure enmani_208eeAinda não há avaliações
- 1 Steel Market Developments 2015Q2Documento25 páginas1 Steel Market Developments 2015Q2ecaph244Ainda não há avaliações
- ADA417401 - XM35 105mm Gun With FOOB PDFDocumento57 páginasADA417401 - XM35 105mm Gun With FOOB PDFScott_B4UAinda não há avaliações
- Wartsila - V31 Diesel Engine - Brochure-O-E-W-31 PDFDocumento4 páginasWartsila - V31 Diesel Engine - Brochure-O-E-W-31 PDFScott_B4UAinda não há avaliações
- Greek EAS Pyrkal - 155mm M107Documento2 páginasGreek EAS Pyrkal - 155mm M107Scott_B4UAinda não há avaliações
- Greek EAS Pyrkal - 155mm M107Documento2 páginasGreek EAS Pyrkal - 155mm M107Scott_B4UAinda não há avaliações
- ForecastInternational - AGM-119 Penguin - F658 - CompleteSample PDFDocumento14 páginasForecastInternational - AGM-119 Penguin - F658 - CompleteSample PDFScott_B4UAinda não há avaliações
- 155mm ER-DP-ICM GRM49-BB Base Bleed Grenade CarrierDocumento2 páginas155mm ER-DP-ICM GRM49-BB Base Bleed Grenade CarrierScott_B4UAinda não há avaliações
- Upton and Thurman's Radar Developments for Cruise Missile DetectionDocumento12 páginasUpton and Thurman's Radar Developments for Cruise Missile DetectionScott_B4UAinda não há avaliações
- Turkish FNSS Lawc T EngDocumento3 páginasTurkish FNSS Lawc T EngScott_B4U100% (1)
- Sipri 1981-2010Documento1 páginaSipri 1981-2010Scott_B4UAinda não há avaliações
- 2007 Swarming in Warfare PaperDocumento36 páginas2007 Swarming in Warfare PaperScott_B4UAinda não há avaliações
- Waste heat recovery economizerDocumento2 páginasWaste heat recovery economizerScott_B4UAinda não há avaliações
- Imperial Guard & Tau Army ListsDocumento7 páginasImperial Guard & Tau Army Listsasfsadfsf2343Ainda não há avaliações
- Wyatts PivotsDocumento14 páginasWyatts PivotsalllyAinda não há avaliações
- Marlin 2008 Catalog PDFDocumento24 páginasMarlin 2008 Catalog PDFjosbadiola3097Ainda não há avaliações
- 2013 03 NewsletterDocumento12 páginas2013 03 NewsletterJordan BlevinsAinda não há avaliações
- The M1A1 Tank in EqyptDocumento5 páginasThe M1A1 Tank in Eqyptpl_junkAinda não há avaliações
- Unit 5 Dates: Getting ReadyDocumento4 páginasUnit 5 Dates: Getting ReadyDimas Febriansyah MuhsinAinda não há avaliações
- 6.बैंक तथा वित्तीय संस्था BAFIA 2073Documento61 páginas6.बैंक तथा वित्तीय संस्था BAFIA 2073Sanam RaiAinda não há avaliações
- F22 Raptor Assembly InstructionsDocumento4 páginasF22 Raptor Assembly InstructionsAdrian Rosero BautistaAinda não há avaliações
- Modern Mobile Command Centers for Police OperationsDocumento11 páginasModern Mobile Command Centers for Police OperationsCar LoAinda não há avaliações
- Ion of Bangladesh PoliceDocumento11 páginasIon of Bangladesh PoliceMd Saifur Rahman AdilAinda não há avaliações
- Chinese String of Pearls TheoryDocumento1 páginaChinese String of Pearls TheoryTigran YepremyanAinda não há avaliações
- Jeler Grigore Romana Forma EnglezaDocumento7 páginasJeler Grigore Romana Forma EnglezaGrigore JelerAinda não há avaliações
- Englishness VS BritishnessDocumento4 páginasEnglishness VS Britishnesssorin_rulesAinda não há avaliações
- Pathfinder Committees and Job Descriptions Resource Material Jan 09 PDFDocumento32 páginasPathfinder Committees and Job Descriptions Resource Material Jan 09 PDFIanjay RatillaAinda não há avaliações
- Genghis Khan and His FalconDocumento1 páginaGenghis Khan and His FalconAndreRicamaraAinda não há avaliações
- Navy PlanningDocumento6 páginasNavy Planning李健Ainda não há avaliações
- ACADEMY - Bonded for Life: ArrivalDocumento238 páginasACADEMY - Bonded for Life: ArrivalkrishnaAinda não há avaliações
- EAU - Adventurer's 1-4Documento4 páginasEAU - Adventurer's 1-4WILLIAM ALBERTO BETTIN SANCHEZAinda não há avaliações
- The United Nations Ad Hoc Tribunals' Effectiveness in Prosecuting International CrimesDocumento439 páginasThe United Nations Ad Hoc Tribunals' Effectiveness in Prosecuting International Crimesiihaoutreach100% (1)
- Hidden Outcast ClubDocumento274 páginasHidden Outcast ClubParísAinda não há avaliações
- NewTrainingMeeting S14Documento45 páginasNewTrainingMeeting S14t319263Ainda não há avaliações
- WOR130H1 - Mortar Ammunition Europe Archived NOVDocumento10 páginasWOR130H1 - Mortar Ammunition Europe Archived NOVОлег ПоборцевAinda não há avaliações
- Corbin Technical Bulletin Volume 1Documento38 páginasCorbin Technical Bulletin Volume 1aikidomoyses0% (1)