Você também pode gostar
- Curso de Controlindstrial PDFDocumento262 páginasCurso de Controlindstrial PDFelelefanterozadoAinda não há avaliações
- IE Control de Motores ElctricosDocumento115 páginasIE Control de Motores ElctricosMONDRAGONE100% (1)
- I. Guía Pedagógica Del Módulo Elaboración de Presupuestos: ELPR-02Documento44 páginasI. Guía Pedagógica Del Módulo Elaboración de Presupuestos: ELPR-02Julio BaylonAinda não há avaliações
- Cad en AsDocumento37 páginasCad en AsRicardo BarrazaAinda não há avaliações
- de Profesor Tradicional A Profesor InnovadorDocumento7 páginasde Profesor Tradicional A Profesor InnovadorSabbat Gadiel HernandezAinda não há avaliações
- Check List de Mantenimiento PDFDocumento11 páginasCheck List de Mantenimiento PDFAnonymous rsIdXBVJe50% (2)
- Circuitos MixtosDocumento17 páginasCircuitos MixtosCarlos Reyes0% (1)
- Mantenimiento Bandas Gates EspañolDocumento68 páginasMantenimiento Bandas Gates EspañolJE1977Ainda não há avaliações
- Circuitosneumaticos PDFDocumento5 páginasCircuitosneumaticos PDFJose Alfredo Rojas UribeAinda não há avaliações
- Mantenimiento A Sistemas ElectrónicosDocumento11 páginasMantenimiento A Sistemas ElectrónicosJulio BaylonAinda não há avaliações
- Cuaderno de EjerciciosDocumento14 páginasCuaderno de EjerciciosNuria MurilloAinda não há avaliações
- Circuitos de Control y Motores Electricos Parte 2Documento35 páginasCircuitos de Control y Motores Electricos Parte 2armandojr1991100% (13)
- Qué Es Electrónica DigitalDocumento15 páginasQué Es Electrónica DigitalJulio BaylonAinda não há avaliações
- Competencias Disciplinares ExtendidasDocumento14 páginasCompetencias Disciplinares ExtendidasJulio BaylonAinda não há avaliações
- Simbologia Europea PDFDocumento13 páginasSimbologia Europea PDFMiguel Angel Martinez Moreno75% (4)
- Filtros HidraulicosDocumento10 páginasFiltros HidraulicosJulio BaylonAinda não há avaliações
- Circuitos de Control y Motores Electricos Parte 2Documento35 páginasCircuitos de Control y Motores Electricos Parte 2armandojr1991100% (13)
- Pag. 17 Diagrama FuncionalDocumento21 páginasPag. 17 Diagrama FuncionalMaría Guadalupe Calderón LópezAinda não há avaliações
- El Mecanismo de Bombeo de La Bomba de Pistones Radiales Consiste en Un Barril de CilindrosDocumento1 páginaEl Mecanismo de Bombeo de La Bomba de Pistones Radiales Consiste en Un Barril de CilindrosJulio BaylonAinda não há avaliações
- Curso de Controlindstrial PDFDocumento262 páginasCurso de Controlindstrial PDFelelefanterozadoAinda não há avaliações
- Instrumentos de MedicionDocumento60 páginasInstrumentos de MedicionJulio BaylonAinda não há avaliações
- Lubricacionindustrial 2Documento55 páginasLubricacionindustrial 2Julio BaylonAinda não há avaliações
- Cotización - Perú - Topcon Os-105Documento7 páginasCotización - Perú - Topcon Os-105Juan Carlos Machicao PariAinda não há avaliações
- Evolución de Los Dispositivos de AlmacenamientoDocumento17 páginasEvolución de Los Dispositivos de AlmacenamientoNerea Cascon DiazAinda não há avaliações
- IntentService Devolviendo Datos A ActivityDocumento10 páginasIntentService Devolviendo Datos A ActivityJuan AraujoAinda não há avaliações
- Trabajo EthernetDocumento58 páginasTrabajo Ethernetiona chou100% (2)
- Ejemplos de MantenimientoDocumento6 páginasEjemplos de MantenimientoBookenlineaAinda não há avaliações
- Cambio de Denominaciones MultivendorDocumento6 páginasCambio de Denominaciones MultivendorJosue NavaAinda não há avaliações
- Free BSDDocumento13 páginasFree BSDyeison ferneidy castillo castiblancoAinda não há avaliações
- I PadDocumento4 páginasI PadJaviera RochatAinda não há avaliações
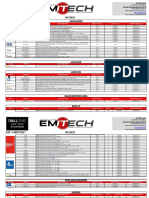
- Lista de Precios Distribuidora Emitech 03 Oct 2022Documento15 páginasLista de Precios Distribuidora Emitech 03 Oct 2022hg1811Ainda não há avaliações
- Configuración y programación S5-90UDocumento25 páginasConfiguración y programación S5-90URodrigoAinda não há avaliações
- Timers Atmega328pDocumento12 páginasTimers Atmega328pGastón ValdezAinda não há avaliações
- Silabus - PROGRAMACION DE COMPUTADORAS PDFDocumento9 páginasSilabus - PROGRAMACION DE COMPUTADORAS PDFRichard Capuñay ParedesAinda não há avaliações
- 01 - Programación Orientada A Objetos P1. Introducción A ObjetosDocumento22 páginas01 - Programación Orientada A Objetos P1. Introducción A Objetosalejandro gonzalezAinda não há avaliações
- Programa NeobookDocumento12 páginasPrograma NeobookWanderley AsencioAinda não há avaliações
- P1 GNS3 AtmDocumento8 páginasP1 GNS3 AtmAndreina BarcoAinda não há avaliações
- Nodo ComputerDocumento15 páginasNodo ComputerJosePerezAinda não há avaliações
- Redes, tipos y característicasDocumento24 páginasRedes, tipos y característicasEdgard CAJACHAHUA ROJASAinda não há avaliações
- Satellite C845D Especificaciones Detalladas Del Producto: Tecnología Visión de AMD ConDocumento3 páginasSatellite C845D Especificaciones Detalladas Del Producto: Tecnología Visión de AMD ConAndres MuñozAinda não há avaliações
- Manual de Usuario de Staruml RiderDocumento19 páginasManual de Usuario de Staruml RiderMishael TacaAinda não há avaliações
- Documentar Sus Programas en AccessDocumento25 páginasDocumentar Sus Programas en AccessMarcy ADAinda não há avaliações
- Mapa Mental TelematicaDocumento2 páginasMapa Mental TelematicayeipolAinda não há avaliações
- Quizz .Documento8 páginasQuizz .Dayanna CardenasAinda não há avaliações
- Inventario Aula de Innovacion Pedagógica 2022Documento4 páginasInventario Aula de Innovacion Pedagógica 2022Carmen Araceli Villegas RojasAinda não há avaliações
- Práctica 8.16 - Alojamiento VirtualDocumento7 páginasPráctica 8.16 - Alojamiento VirtualfadsfsdaAinda não há avaliações
- Servidores en La NubeDocumento16 páginasServidores en La NubeNohemyAinda não há avaliações
- Registro de Windows para Usuarios Avanzados - Windows Server - Microsoft DocsDocumento9 páginasRegistro de Windows para Usuarios Avanzados - Windows Server - Microsoft DocsMiguelAngelLonAinda não há avaliações
- Procesamiento de Datos 2Documento4 páginasProcesamiento de Datos 2Federico AzodnemAinda não há avaliações
- Hardening v2Documento22 páginasHardening v2rodysoftAinda não há avaliações
- Subversion SpanishDocumento35 páginasSubversion Spanishinigomaringarcia100% (7)
- PTP 802.11Documento13 páginasPTP 802.11cristianalmagroAinda não há avaliações