Você também pode gostar
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- App ElecDocumento50 páginasApp Elecjayj_5Ainda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- 566176045Documento167 páginas566176045Karthikeyan TamilselvamAinda não há avaliações
- UMLDocumento20 páginasUMLKarthikeyan TamilselvamAinda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Vojn Zivojnovic - Stefen Pees - Heinrich MeyrDocumento12 páginasVojn Zivojnovic - Stefen Pees - Heinrich MeyrKarthikeyan TamilselvamAinda não há avaliações
- FIR FilterDocumento82 páginasFIR FilterKarthikeyan TamilselvamAinda não há avaliações
- Ce 1254 Surveying IIDocumento19 páginasCe 1254 Surveying IIsaamyAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Analog To Digital ConversionDocumento40 páginasAnalog To Digital ConversionKarthikeyan TamilselvamAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Aksheyaa College of Engineering, Chennai Department of Electronics and Communication EngineeringDocumento20 páginasAksheyaa College of Engineering, Chennai Department of Electronics and Communication EngineeringKarthikeyan TamilselvamAinda não há avaliações
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- MCQ AcsDocumento49 páginasMCQ AcsVinoth Kumar100% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
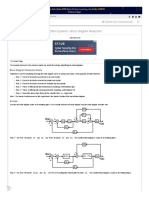
- Control Systems Block Diagram Reduction Www-TutorialspointDocumento2 páginasControl Systems Block Diagram Reduction Www-TutorialspointshrikrisAinda não há avaliações
- Ebook Modern Control Systems PDF Full Chapter PDFDocumento67 páginasEbook Modern Control Systems PDF Full Chapter PDFelia.green622100% (27)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Ambo University: Regulation and ControlDocumento20 páginasAmbo University: Regulation and ControlFikadu EshetuAinda não há avaliações
- 5 - Block Diagram ReductionDocumento20 páginas5 - Block Diagram ReductionAngel RupidoAinda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Cse PDFDocumento33 páginasCse PDFSha Nkar JavleAinda não há avaliações
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Signal-Flow Graphs & Mason's RuleDocumento18 páginasSignal-Flow Graphs & Mason's RuleRemuel ArellanoAinda não há avaliações
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Analog & Digital Control SystemsDocumento3 páginasAnalog & Digital Control SystemsAyush PurohitAinda não há avaliações
- EE2253 NotesDocumento124 páginasEE2253 NotesSiva Kathikeyan100% (1)
- SFGDocumento55 páginasSFGsreenathreddyAinda não há avaliações
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Ic6703 Cs QBDocumento25 páginasIc6703 Cs QBsunil1237Ainda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Feedback AmplifierDocumento52 páginasFeedback AmplifierBharavi K SAinda não há avaliações
- Automatic Control Systems Kuo Ed3Documento671 páginasAutomatic Control Systems Kuo Ed3IonelCopAinda não há avaliações
- Ce Aero LessonplanDocumento7 páginasCe Aero LessonplangallantprakashAinda não há avaliações
- Modern Control Engineering by OGATA 2. Automatic Control System by KUO. 3. Control System Engineering by Norman S. NiseDocumento21 páginasModern Control Engineering by OGATA 2. Automatic Control System by KUO. 3. Control System Engineering by Norman S. Niseأحمد تركي كحيوشAinda não há avaliações
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Velammal Engineering College, Chennai-600066 Electronics and Communication Engineering Ut I Question Bank Unit I Part ADocumento3 páginasVelammal Engineering College, Chennai-600066 Electronics and Communication Engineering Ut I Question Bank Unit I Part Asubramanian subramanianAinda não há avaliações
- Chapter 4 Signal Flow GraphDocumento34 páginasChapter 4 Signal Flow GraphAbhishek PattanaikAinda não há avaliações
- Control Systems NotesDocumento159 páginasControl Systems NotesPefap100% (1)
- Signal Flow DiagramsDocumento20 páginasSignal Flow DiagramsSingappuliAinda não há avaliações
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Faculty of Engineering and Technology (Co-Education)Documento4 páginasFaculty of Engineering and Technology (Co-Education)sanjuAinda não há avaliações
- Control System Analysis-Lecture 2Documento13 páginasControl System Analysis-Lecture 2Dhirendra SoniAinda não há avaliações
- Chap 2 Mathematical Model of Continuous SystemsDocumento63 páginasChap 2 Mathematical Model of Continuous SystemsTrần Hoài BảoAinda não há avaliações
- Vlsi Signal ProcessingDocumento455 páginasVlsi Signal ProcessingPavan TejaAinda não há avaliações
- Structures For Discrete Time SystemsDocumento10 páginasStructures For Discrete Time SystemsShubham BhaleraoAinda não há avaliações
- Nr-220206 Control SystemsDocumento8 páginasNr-220206 Control SystemsSrinivasa Rao G100% (1)
- PaperDocumento23 páginasPapersachin patelAinda não há avaliações
- Mason Formula and Signal Flow GraphsDocumento7 páginasMason Formula and Signal Flow GraphsEyvaz NajafliAinda não há avaliações
- Question Bank 2017 RegDocumento19 páginasQuestion Bank 2017 RegSelvaraj ParamasivanAinda não há avaliações
- Eee IV Control Systems 10es43 Notes PDFDocumento124 páginasEee IV Control Systems 10es43 Notes PDFKiranjith KrishnanAinda não há avaliações