Você também pode gostar
- Tech Tip USAGEN002 Troubleshooting No Start From The Controller of A QAS 38-58-78 and 138 Generator PDFDocumento8 páginasTech Tip USAGEN002 Troubleshooting No Start From The Controller of A QAS 38-58-78 and 138 Generator PDFNuno PaivaAinda não há avaliações
- Altair Hyperworks Hypermesh 8 - 0 Tutorial MeshingDocumento93 páginasAltair Hyperworks Hypermesh 8 - 0 Tutorial MeshingSuresh MohiteAinda não há avaliações
- Touchwin ZG ManualDocumento93 páginasTouchwin ZG ManualAlejandro LealAinda não há avaliações
- Service Pack R15.0.7 UpdateDocumento44 páginasService Pack R15.0.7 UpdateKrozeAinda não há avaliações
- Explicit Dynamic Analysis in AbaqusDocumento19 páginasExplicit Dynamic Analysis in AbaqusDavid RivadeneiraAinda não há avaliações
- Thrust Restraint & Anchor BlocksDocumento8 páginasThrust Restraint & Anchor BlocksElias BuAinda não há avaliações
- Assignment 5 PDFDocumento4 páginasAssignment 5 PDFRima ChinnasamyAinda não há avaliações
- 7 Abaqus Conv GuidelinesDocumento4 páginas7 Abaqus Conv GuidelinesSrinivas RallabandiAinda não há avaliações
- Solidworks PDFDocumento9 páginasSolidworks PDFSahil SharmaAinda não há avaliações
- What's New - PV Elite 2019Documento10 páginasWhat's New - PV Elite 2019Vikas Patil YevleAinda não há avaliações
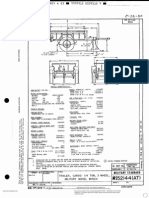
- Ms52144-At M416a1 DrawingDocumento1 páginaMs52144-At M416a1 Drawingbilly dillpickerAinda não há avaliações
- How To Design New Grippers by AnalogyDocumento19 páginasHow To Design New Grippers by AnalogyGajendrashih ParmarAinda não há avaliações
- SolidWorks Simulation - Avoiding SingularitiesDocumento6 páginasSolidWorks Simulation - Avoiding SingularitiesAnonymous P8Bt46mk5IAinda não há avaliações
- MIL STD 810G Transportation VibrationDocumento15 páginasMIL STD 810G Transportation Vibrationcen1510353Ainda não há avaliações
- National Instruments MCM DayDocumento71 páginasNational Instruments MCM DayHero VinothAinda não há avaliações
- PLC PDFDocumento483 páginasPLC PDFDev dasAinda não há avaliações
- Manual MC 500prDocumento26 páginasManual MC 500prNasshikin RamliAinda não há avaliações
- SNUx Chapter 3 PDFDocumento22 páginasSNUx Chapter 3 PDFMuhammad IrfanAinda não há avaliações
- Seminar Report 1Documento28 páginasSeminar Report 1Akshay Kumar E HAinda não há avaliações
- SusProg3D PDFDocumento299 páginasSusProg3D PDFyagoegay100% (1)
- Solidworks Flow Simulation 2011Documento290 páginasSolidworks Flow Simulation 2011wadiusAinda não há avaliações
- RADIOSS For Impact Analysis v12 Rev20130214 A PDFDocumento328 páginasRADIOSS For Impact Analysis v12 Rev20130214 A PDFKevin ChackochanAinda não há avaliações
- Universal JointDocumento17 páginasUniversal JointMasAmirahAinda não há avaliações
- Hydraulic PressDocumento11 páginasHydraulic PressAlagu EswaranAinda não há avaliações
- 2D Meshing Chapter: Feature Capturing and Mesh QualityDocumento82 páginas2D Meshing Chapter: Feature Capturing and Mesh QualityPraveen CAinda não há avaliações
- Updated EM Complete Notes 2016Documento169 páginasUpdated EM Complete Notes 2016Daniel CookAinda não há avaliações
- UNIT1L3S - Engine Performance TerminologyDocumento10 páginasUNIT1L3S - Engine Performance TerminologyEbied Yousif AlyAinda não há avaliações
- Aetc Form 214, Jul 93 Previous Editions Are Obsolete Standard CoversheetDocumento159 páginasAetc Form 214, Jul 93 Previous Editions Are Obsolete Standard CoversheetBill AlbertAinda não há avaliações
- DMIGDocumento24 páginasDMIGNNZkhanAinda não há avaliações
- Anti SkewDocumento2 páginasAnti SkewvozefjadavAinda não há avaliações
- Thick CylinderDocumento17 páginasThick CylinderJohnAinda não há avaliações
- Networking Troubleshooting Complete Self-Assessment GuideNo EverandNetworking Troubleshooting Complete Self-Assessment GuideAinda não há avaliações
- Remove & Install Boom CylindersDocumento10 páginasRemove & Install Boom CylinderschanlinAinda não há avaliações
- How To Interpret FEA ResultsDocumento17 páginasHow To Interpret FEA ResultsHugo Andrés Eslava GorraizAinda não há avaliações
- Dodig m2 Quality D 2010 035Documento54 páginasDodig m2 Quality D 2010 035MotherboardTVAinda não há avaliações
- Design & Manufacturing of 20 Ton Horizontal Hydraulic Press Machine For Pipe Squeezing & Flaring OperationDocumento5 páginasDesign & Manufacturing of 20 Ton Horizontal Hydraulic Press Machine For Pipe Squeezing & Flaring Operationabdullah yousefiAinda não há avaliações
- GCCS2 CommonTask Module10 Rev6.0Documento69 páginasGCCS2 CommonTask Module10 Rev6.0Jorge Meza100% (1)
- Force Analysis - PPSXDocumento107 páginasForce Analysis - PPSXÖmer Faruk EkizAinda não há avaliações
- Thermo 7e SM Chap03-1Documento80 páginasThermo 7e SM Chap03-1arfff321100% (1)
- Lab 3Documento7 páginasLab 3jisteeleAinda não há avaliações
- Selection of Bearing SizeDocumento5 páginasSelection of Bearing SizeWayu100% (1)
- SolidWorks Tutorial 3D TrussesDocumento15 páginasSolidWorks Tutorial 3D Trussesduytan_150713350Ainda não há avaliações
- CATIA - Aerospace Sheet Metal Design (ASL)Documento5 páginasCATIA - Aerospace Sheet Metal Design (ASL)Shanaka JayasekaraAinda não há avaliações
- Thesis FulltextDocumento130 páginasThesis FulltextBrijith ShenoiAinda não há avaliações
- Torsion Test1Documento6 páginasTorsion Test1musher95100% (1)
- Warning: This Feature Is Intended For Advanced Users Only. Its Use in All But The Simplest TestDocumento16 páginasWarning: This Feature Is Intended For Advanced Users Only. Its Use in All But The Simplest TestMohit1234zxtAinda não há avaliações
- Abaqus Analysis User's Manual, 32.15 (User Elements)Documento22 páginasAbaqus Analysis User's Manual, 32.15 (User Elements)Elias BuAinda não há avaliações
- VUMAT ABAQUS User Subroutine Instruction Reference ManualDocumento14 páginasVUMAT ABAQUS User Subroutine Instruction Reference ManualShahram AbbasnejadAinda não há avaliações
- Control Systems Lab #3: Stability AnalysisDocumento5 páginasControl Systems Lab #3: Stability Analysisahmed shahAinda não há avaliações
- USDFLD User Subroutine Redefines Field VariablesDocumento7 páginasUSDFLD User Subroutine Redefines Field VariablesMD Anan MorshedAinda não há avaliações
- UseOf Umat Abaqus2016 PDFDocumento16 páginasUseOf Umat Abaqus2016 PDFOsmanKatliAinda não há avaliações
- Cnvtol: Nonlinear OptionsDocumento3 páginasCnvtol: Nonlinear Optionsbasa rkAinda não há avaliações
- Harmonic Analysis IN ANSYSDocumento15 páginasHarmonic Analysis IN ANSYSSai KiranAinda não há avaliações
- Manual Digsilent 3-5Documento214 páginasManual Digsilent 3-5ruben50% (2)
- 1-UMAT @ABAQUS-User Subroutine Instruction (Reference Manual)Documento16 páginas1-UMAT @ABAQUS-User Subroutine Instruction (Reference Manual)pcncku1215Ainda não há avaliações
- Material Nonlinearities and Geometric Nonlinearities (Change in Response Due To Large Deformations)Documento7 páginasMaterial Nonlinearities and Geometric Nonlinearities (Change in Response Due To Large Deformations)api-3833671Ainda não há avaliações
- Fatigue ANSYSDocumento22 páginasFatigue ANSYSapi-3717939100% (2)
- Reaction OperationsDocumento240 páginasReaction OperationsAndré Guimarães GomesAinda não há avaliações
- 7.5. Procedure For Eigenvalue Buckling AnalysisDocumento2 páginas7.5. Procedure For Eigenvalue Buckling Analysisayoube mecaAinda não há avaliações
- Ansys Statics 1 v8p1Documento13 páginasAnsys Statics 1 v8p1Anderson LealAinda não há avaliações
- OperModels PDFDocumento240 páginasOperModels PDFCarlos de la TorreAinda não há avaliações
- Fatigue Analysis Using ANSYSDocumento22 páginasFatigue Analysis Using ANSYSHarilal RemesanAinda não há avaliações
- Abaqus Analysis User's Manual, 32.15 (User Elements)Documento22 páginasAbaqus Analysis User's Manual, 32.15 (User Elements)Elias BuAinda não há avaliações
- 4SKDocumento4 páginas4SKElias BuAinda não há avaliações
- BS 5930 A2 DPC Feb 2010Documento32 páginasBS 5930 A2 DPC Feb 2010Subrata Saha100% (2)
- ProForm 590HRDocumento18 páginasProForm 590HRElias BuAinda não há avaliações
- The Analysis of Orthotropic Skew Bridge Slabs by A. CoullDocumento13 páginasThe Analysis of Orthotropic Skew Bridge Slabs by A. CoullElias BuAinda não há avaliações
- Overview of Structural Systems For Single-Storey BuildingsDocumento22 páginasOverview of Structural Systems For Single-Storey BuildingsElias BuAinda não há avaliações
- AASHTO - (Manual For Condition Evaluation of Bridges)Documento138 páginasAASHTO - (Manual For Condition Evaluation of Bridges)ingebetoAinda não há avaliações
- Standards For Plastics PipingDocumento54 páginasStandards For Plastics Pipingcalidad1340Ainda não há avaliações
- Inspiron: Setup GuideDocumento102 páginasInspiron: Setup GuideShpëtim ZubakuAinda não há avaliações
- How To Dual Boot Vista and XP With Vista InstDocumento52 páginasHow To Dual Boot Vista and XP With Vista InstElias BuAinda não há avaliações
- Paper 1503 Mpou Par Tal COMPDYN2007Documento2 páginasPaper 1503 Mpou Par Tal COMPDYN2007Elias BuAinda não há avaliações
- ArduinoDocumento40 páginasArduinovicalog100% (6)
- TetrahedronDocumento6 páginasTetrahedronElias BuAinda não há avaliações
- Center of GravityDocumento7 páginasCenter of GravityAnonymous QiMB2lBCJLAinda não há avaliações
- Modern Physics PDFDocumento20 páginasModern Physics PDFPrathm MittalAinda não há avaliações
- Quantum Physics, Depth Psychology, and BeyondDocumento16 páginasQuantum Physics, Depth Psychology, and BeyondquantumrealmAinda não há avaliações
- Effect of Pad Geometry and Material On Performance of Evaporative CoolerDocumento11 páginasEffect of Pad Geometry and Material On Performance of Evaporative CoolerNavsumeet Singh SandhuAinda não há avaliações
- Liquid Drop Model of NucleusDocumento4 páginasLiquid Drop Model of NucleusHemanta BhattaraiAinda não há avaliações
- T-1-2 WT Subsonic Wind Tunnel CapabilitiesDocumento2 páginasT-1-2 WT Subsonic Wind Tunnel CapabilitieszoranmiskovicAinda não há avaliações
- Revised Profile Capacity-UpdateDocumento2 páginasRevised Profile Capacity-UpdateRitwick BhattacharyaAinda não há avaliações
- Amplitude - PhaseDocumento6 páginasAmplitude - Phasemuhammad awaisAinda não há avaliações
- What Is Hooke's Law - (Article) - Khan AcademyDocumento11 páginasWhat Is Hooke's Law - (Article) - Khan AcademyDahanyakage WickramathungaAinda não há avaliações
- Atoms and the Atomic TheoryDocumento2 páginasAtoms and the Atomic Theoryfaithphotos2019Ainda não há avaliações
- Xtract V 3 0 8Documento72 páginasXtract V 3 0 8Don Ing Marcos LeónAinda não há avaliações
- Correlation between viscosities in dynamic and steady flowDocumento3 páginasCorrelation between viscosities in dynamic and steady flowM.Çağrı AltındalAinda não há avaliações
- 26-08-23 JR - Super60 Nucleus BT Jee-Main Wtm-06 Key & Sol'sDocumento12 páginas26-08-23 JR - Super60 Nucleus BT Jee-Main Wtm-06 Key & Sol'sSanthosh KasulavadhaAinda não há avaliações
- L4 - Application of Momentum Integral Theorem and Boundary Layer SeparationDocumento25 páginasL4 - Application of Momentum Integral Theorem and Boundary Layer SeparationKar AbhishekAinda não há avaliações
- 180 TOP Concrete Technology & Design of Concrete SDocumento49 páginas180 TOP Concrete Technology & Design of Concrete SQaria shehzadiAinda não há avaliações
- BrainMEsh Quizzers EliminationDocumento42 páginasBrainMEsh Quizzers EliminationOrly SalvadorAinda não há avaliações
- Marketing Information T 588 N T 589 N: European Power-Semiconductor and Electronics CompanyDocumento7 páginasMarketing Information T 588 N T 589 N: European Power-Semiconductor and Electronics CompanysebastianAinda não há avaliações
- P1370 10S Unit 1 MotionDocumento11 páginasP1370 10S Unit 1 Motiondevbones18Ainda não há avaliações
- Assignment 3Documento3 páginasAssignment 3Kibrom GebremedhinAinda não há avaliações
- Exercise MATTERDocumento8 páginasExercise MATTERShu85Ainda não há avaliações
- Combined Footing Design Based On ACI 318-02Documento2 páginasCombined Footing Design Based On ACI 318-02my09Ainda não há avaliações
- CHAPTER 2 Motion Along A Straight Line: 2.1 Position, Displacement, and Average VelocityDocumento8 páginasCHAPTER 2 Motion Along A Straight Line: 2.1 Position, Displacement, and Average VelocitymikeAinda não há avaliações
- Load Deflection Behaviour of Restrained RC Skew Slabs Using FEM TechniqueDocumento6 páginasLoad Deflection Behaviour of Restrained RC Skew Slabs Using FEM Techniquewhite peacockAinda não há avaliações
- Numerical Modeling of Physical Process of Far Field Underwater ExplosionsDocumento11 páginasNumerical Modeling of Physical Process of Far Field Underwater ExplosionsKristjan TabriAinda não há avaliações
- Lifting Lug DesignDocumento18 páginasLifting Lug DesignRui Salvador0% (1)
- Topic 22 - ElectromagnetismDocumento5 páginasTopic 22 - ElectromagnetismMauriceAinda não há avaliações
- Test Bank: Chapter 1, Problem 2Documento12 páginasTest Bank: Chapter 1, Problem 2miladAinda não há avaliações
- Stability - AISC's Direct Analysis Method - How To EngineerDocumento13 páginasStability - AISC's Direct Analysis Method - How To Engineerpatricklim1982Ainda não há avaliações
- THERMODYNAMICS 1 Rev 2Documento62 páginasTHERMODYNAMICS 1 Rev 2Jads Cayabyab100% (2)