Você também pode gostar
- Chapter1 121210210811 Phpapp02Documento57 páginasChapter1 121210210811 Phpapp02sharkeraAinda não há avaliações
- Lecture-16-Direct Torque Control PDFDocumento33 páginasLecture-16-Direct Torque Control PDFKriban Govender100% (1)
- ServomotorsDocumento17 páginasServomotorsVi GaneshAinda não há avaliações
- What The Drive Does ?Documento22 páginasWhat The Drive Does ?Divyansh PariharAinda não há avaliações
- Servomotors: by Joseph M Abraham Aeronautical DeptDocumento17 páginasServomotors: by Joseph M Abraham Aeronautical DeptibrahimAinda não há avaliações
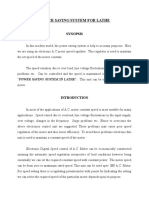
- Power Saving System For Lathe 6000Documento5 páginasPower Saving System For Lathe 6000Kailash VasmateAinda não há avaliações
- Ch8 - DC DrivesDocumento55 páginasCh8 - DC DrivesAli HasanyAinda não há avaliações
- Lab ReportDocumento84 páginasLab ReportusmanzahidAinda não há avaliações
- Dcp031 Power Saving System For LatheDocumento3 páginasDcp031 Power Saving System For LatheANAND KRISHNANAinda não há avaliações
- Ac ServoDocumento38 páginasAc ServoPhạm Hữu KỳAinda não há avaliações
- Factfiletd1 Motor Control With DTC Revb en LowresDocumento2 páginasFactfiletd1 Motor Control With DTC Revb en LowresPavan Sameer Kumar CAinda não há avaliações
- Servo MotorDocumento18 páginasServo MotorMinh HảiAinda não há avaliações
- Control Theory 31 PDFDocumento44 páginasControl Theory 31 PDFAmit TiwaryAinda não há avaliações
- 00f5luzk001 Elevator Quick Start UpDocumento4 páginas00f5luzk001 Elevator Quick Start UpAliRouyouAinda não há avaliações
- Servomotor PptsDocumento26 páginasServomotor Pptsjasdeep_kour236066Ainda não há avaliações
- 26.wireless Speed and Direction Control of DC Motor Using RF TechnologyDocumento3 páginas26.wireless Speed and Direction Control of DC Motor Using RF TechnologyANAND KRISHNANAinda não há avaliações
- Protocol of RS232Documento11 páginasProtocol of RS232Charanpreet SinghAinda não há avaliações
- Types of MotorsDocumento15 páginasTypes of Motorskbp qawaAinda não há avaliações
- RMCS220x DCServo DriverDocumento11 páginasRMCS220x DCServo DriverPrasanna SinthajeAinda não há avaliações
- Control of DC Machines Drive: Fall 2014 Department of Electrical Engineering GC, University, LahoreDocumento22 páginasControl of DC Machines Drive: Fall 2014 Department of Electrical Engineering GC, University, LahoremayajogiAinda não há avaliações
- Digital Signal Processor Based Vbyf Control of Speed of Induction MotorDocumento24 páginasDigital Signal Processor Based Vbyf Control of Speed of Induction MotorManu JainAinda não há avaliações
- Kollmorgen Servostar CD Series2 CatalogDocumento20 páginasKollmorgen Servostar CD Series2 CatalogElectromateAinda não há avaliações
- 5 - Control System TrainerDocumento50 páginas5 - Control System TrainerGadam Siva Charan DasAinda não há avaliações
- Synopsis On Minor Project: FPGA Based Stepper Motor Control Guided by Er. Poonam Yadav AUG 2O12-DEC 2012Documento8 páginasSynopsis On Minor Project: FPGA Based Stepper Motor Control Guided by Er. Poonam Yadav AUG 2O12-DEC 2012Arun TomarAinda não há avaliações
- Single Phase Induction Motor Speed ControlDocumento35 páginasSingle Phase Induction Motor Speed ControlHarshit Sengar100% (2)
- Speed Control of DC Motor Using Pid Controller BasedDocumento16 páginasSpeed Control of DC Motor Using Pid Controller Basedayesha amjadAinda não há avaliações
- Modeling Servo Motor System2 PDFDocumento38 páginasModeling Servo Motor System2 PDFabc1000Ainda não há avaliações
- Electric Motor Speed Control System With Clockwise and Anti-Clockwise DirectionDocumento3 páginasElectric Motor Speed Control System With Clockwise and Anti-Clockwise Directionanoopk222Ainda não há avaliações
- Sensorless Speed Controlled Brushless DC Drive Using The TMS320C242 DSP ControllerDocumento17 páginasSensorless Speed Controlled Brushless DC Drive Using The TMS320C242 DSP ControllerVladv123Ainda não há avaliações
- MCI FeedbSensorDocumento6 páginasMCI FeedbSensoravi_ca22Ainda não há avaliações
- VFD Trainer With Motor Features:: SiemensDocumento6 páginasVFD Trainer With Motor Features:: Siemenshimanshu mohapatraAinda não há avaliações
- Eceg-5401 2Documento37 páginasEceg-5401 2Kide Bay0% (1)
- Topic 1 - Servo TechnologyDocumento32 páginasTopic 1 - Servo TechnologyRakesh Karan SinghAinda não há avaliações
- Re 98081Documento6 páginasRe 98081JorGeh LinkinParkAinda não há avaliações
- Understanding VFDDocumento46 páginasUnderstanding VFDZakariya100% (2)
- ActuatorsDocumento9 páginasActuatorsAvinash BaldiAinda não há avaliações
- Stepper Motor Construction and Its FunctionsDocumento25 páginasStepper Motor Construction and Its FunctionsIlakiya MaduraiAinda não há avaliações
- Assignment: Topic:-MODULE-VI Control System Components andDocumento61 páginasAssignment: Topic:-MODULE-VI Control System Components andAmit TiwaryAinda não há avaliações
- Brushless Servomotor: Presented byDocumento16 páginasBrushless Servomotor: Presented byDev KumarAinda não há avaliações
- Ac Servo MotorDocumento14 páginasAc Servo MotorJeyanthAinda não há avaliações
- Servo Motor SystemDocumento38 páginasServo Motor SystemPutra ArisandyAinda não há avaliações
- DriveDocumento7 páginasDrivenaveen jainAinda não há avaliações
- Distributed Motion ControlDocumento6 páginasDistributed Motion ControlzoltanskaAinda não há avaliações
- SMC006Documento6 páginasSMC006Sreejith KumarAinda não há avaliações
- Modeling Servo Mostor System2Documento38 páginasModeling Servo Mostor System2beatle28Ainda não há avaliações
- DTC Induction Motor DriveDocumento13 páginasDTC Induction Motor Drivesarav03100% (2)
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsNo EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsNota: 3.5 de 5 estrelas3.5/5 (6)
- Re95300 2007-12 PDFDocumento16 páginasRe95300 2007-12 PDFrenatAinda não há avaliações
- Single Phase Inverter Using ArduinoDocumento13 páginasSingle Phase Inverter Using Arduinoankitha0% (1)
- Assignment: Topic:-MODULE-VI Control System Components andDocumento61 páginasAssignment: Topic:-MODULE-VI Control System Components andAmit TiwaryAinda não há avaliações
- Ac Position Control Trainer ManualDocumento7 páginasAc Position Control Trainer ManualSHANKARAinda não há avaliações
- Mini Project DC MotorDocumento20 páginasMini Project DC MotorDeepanshu patelAinda não há avaliações
- Medium Voltage Controllers: Description - Bulletin 1500 Vacuum ControllersDocumento2 páginasMedium Voltage Controllers: Description - Bulletin 1500 Vacuum ControllersGregory StewartAinda não há avaliações
- Tip23 e PDFDocumento4 páginasTip23 e PDFThanh BaronAinda não há avaliações
- Theory DC ServoMDocumento3 páginasTheory DC ServoMKaustubh DesaiAinda não há avaliações
- EMCP 4.2 Simulator ManualDocumento9 páginasEMCP 4.2 Simulator ManualParinyaAinda não há avaliações
- Servo MotorDocumento21 páginasServo MotoribrahimAinda não há avaliações
- Synchronous Motor Drives - LCIDocumento15 páginasSynchronous Motor Drives - LCIJoyson PereiraAinda não há avaliações
- DC Motor Speed Control Using C++Documento23 páginasDC Motor Speed Control Using C++eraditya200150% (2)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Nota: 2.5 de 5 estrelas2.5/5 (3)
- Ponte Retificadora Monof - SKB Datasheet SemikronDocumento3 páginasPonte Retificadora Monof - SKB Datasheet SemikronAirton FloresAinda não há avaliações
- Step Response ModelDocumento104 páginasStep Response Modelanuj1166Ainda não há avaliações
- ADF4007 High Frequency Divider-PLL Synth - Dtsheet-2012-Analog DevDocumento17 páginasADF4007 High Frequency Divider-PLL Synth - Dtsheet-2012-Analog DevAirton FloresAinda não há avaliações
- 1.5 KW PWM Bipolar Inverter-2009-California Polytech - ST - Univ PDFDocumento44 páginas1.5 KW PWM Bipolar Inverter-2009-California Polytech - ST - Univ PDFAirton FloresAinda não há avaliações
- 1SBC101140C0203 ContactorsCapacitorSwitching BRDocumento40 páginas1SBC101140C0203 ContactorsCapacitorSwitching BRDavor JunušićAinda não há avaliações
- 2010 Fabricacao Papel TissueDocumento164 páginas2010 Fabricacao Papel TissueAirton Flores100% (1)
- 70 Interesting CircuitsDocumento21 páginas70 Interesting CircuitsHasitha Suneth100% (4)
- Filter Design For Grid Connected InvertersDocumento7 páginasFilter Design For Grid Connected InvertersAirton FloresAinda não há avaliações
- 50 555circuits PDFDocumento108 páginas50 555circuits PDFmleslieAinda não há avaliações
- Bearings & Drives-RockwellDocumento68 páginasBearings & Drives-RockwellAirton FloresAinda não há avaliações
- Termodinamica, 6° ED. - Kurt C. RolleDocumento772 páginasTermodinamica, 6° ED. - Kurt C. Rollemanuel_romero_20_486% (28)
- Bearing Currents-GKE ElektronikDocumento42 páginasBearing Currents-GKE ElektronikAirton FloresAinda não há avaliações
- EMC & Variable Speed Drives-Vacon PDFDocumento8 páginasEMC & Variable Speed Drives-Vacon PDFAirton FloresAinda não há avaliações
- Stepp Mot Interf W 8051-Pantech SolutDocumento12 páginasStepp Mot Interf W 8051-Pantech SolutAirton FloresAinda não há avaliações
- Chopper FiginiDocumento3 páginasChopper FiginiAirton FloresAinda não há avaliações
- Motor Bearings - ABBDocumento8 páginasMotor Bearings - ABBhozipek5599100% (1)
- Selec - MOSFET For Faster Bat - Cell Balanc-AN2013-02-InfineonDocumento7 páginasSelec - MOSFET For Faster Bat - Cell Balanc-AN2013-02-InfineonAirton FloresAinda não há avaliações
- Eddy Current Drives-Holland IndustrialDocumento3 páginasEddy Current Drives-Holland IndustrialAirton FloresAinda não há avaliações
- Motors & Drives-Carbon TrustDocumento38 páginasMotors & Drives-Carbon TrustAirton Flores100% (1)
- Converters For Electric VehicleDocumento8 páginasConverters For Electric VehicleAirton FloresAinda não há avaliações
- Energetical Aspects of Trolleybus Traction With Chopper and Compound Direct Current MotorDocumento6 páginasEnergetical Aspects of Trolleybus Traction With Chopper and Compound Direct Current Motorlongtrandang5867Ainda não há avaliações
- Anti-Sway Contr Program For Ind Cranes-PN Rev a-2011-ABBDocumento2 páginasAnti-Sway Contr Program For Ind Cranes-PN Rev a-2011-ABBAirton Flores50% (2)
- ABB-How To Selected Drives For PumpsDocumento40 páginasABB-How To Selected Drives For PumpsAirton FloresAinda não há avaliações
- Bearings & Drives-RockwellDocumento68 páginasBearings & Drives-RockwellAirton FloresAinda não há avaliações
- The ABC of Variable Freq - Drives-YaskawaDocumento7 páginasThe ABC of Variable Freq - Drives-YaskawaAirton Flores100% (1)
- Basic Motor Theory-RelianceDocumento35 páginasBasic Motor Theory-RelianceAirton FloresAinda não há avaliações
- Basic Motor Theory-RelianceDocumento35 páginasBasic Motor Theory-RelianceAirton FloresAinda não há avaliações
- DVP PLC Programming ExamplsDocumento267 páginasDVP PLC Programming Examplssathiiishkumar67% (3)
- Overvoltage Protection of Electric Vehicle (EV) Charging Infrastructures GloballyDocumento8 páginasOvervoltage Protection of Electric Vehicle (EV) Charging Infrastructures GloballySatadal DashAinda não há avaliações
- JBL PRX715/230: Technical ManualDocumento4 páginasJBL PRX715/230: Technical ManualDanny Boysie100% (1)
- Mos Field Effect Transistor: Data SheetDocumento8 páginasMos Field Effect Transistor: Data SheetAdam SchwemleinAinda não há avaliações
- EMACS Guide Book-V3 PDFDocumento366 páginasEMACS Guide Book-V3 PDFAndrew100% (1)
- Intel RealSense D400 Series Datasheet June 2020 PDFDocumento127 páginasIntel RealSense D400 Series Datasheet June 2020 PDFĐạt GrAinda não há avaliações
- 1K-16K Microwire Compatible Serial Eeproms: Features: DescriptionDocumento38 páginas1K-16K Microwire Compatible Serial Eeproms: Features: DescriptionStuxnetAinda não há avaliações
- Review Paper 2Documento28 páginasReview Paper 2R. natarajan RamasamyAinda não há avaliações
- Argus Input Modules Connection DiagramDocumento2 páginasArgus Input Modules Connection DiagramMd. Biplob HossainAinda não há avaliações
- EDFA-WDM Optical Network Design and Development UsDocumento10 páginasEDFA-WDM Optical Network Design and Development UsmeseretAinda não há avaliações
- Notes - Unit 7Documento21 páginasNotes - Unit 7GunjaAinda não há avaliações
- Keewee Bubar 1 Sampai 16 JuliDocumento3 páginasKeewee Bubar 1 Sampai 16 Julialmanet666Ainda não há avaliações
- Fpd-7024 Programming Manual: Read/DownloadDocumento2 páginasFpd-7024 Programming Manual: Read/DownloadMarcio BritoAinda não há avaliações
- AHU AuotomationDocumento2 páginasAHU AuotomationRockstar JoshiAinda não há avaliações
- L002 DatasheetDocumento1 páginaL002 DatasheetPușcă MartinAinda não há avaliações
- Corrected Final BE EXTC R2019 Syllabus 12-05-2022 8 PMDocumento127 páginasCorrected Final BE EXTC R2019 Syllabus 12-05-2022 8 PMsoniathalavoorAinda não há avaliações
- Vemu Institute of Technology: Bio BatteryDocumento26 páginasVemu Institute of Technology: Bio Batterytech with PraveshAinda não há avaliações
- Introduction To Mechatronic DesignDocumento19 páginasIntroduction To Mechatronic DesignDouglas LuanAinda não há avaliações
- NC951 - 2017 - DML0502200 Rev 4Documento2 páginasNC951 - 2017 - DML0502200 Rev 4Amin ElsayedAinda não há avaliações
- MEC Technical SpecDocumento393 páginasMEC Technical SpecTEMESGENAinda não há avaliações
- Deye On Grid 10KW Data Sheet BIS ApprovedDocumento2 páginasDeye On Grid 10KW Data Sheet BIS Approvedkathiravan muruganAinda não há avaliações
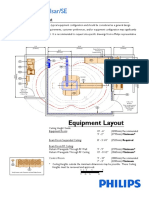
- Achieva 1.5T Pulsar SEDocumento3 páginasAchieva 1.5T Pulsar SEISRAEL MATEOS GARCIA-SALAMANCAAinda não há avaliações
- C 3 Noise and VibrationDocumento118 páginasC 3 Noise and VibrationVasimAinda não há avaliações
- Spec Sheet Freezer 7X enDocumento3 páginasSpec Sheet Freezer 7X enLuka LjubicicAinda não há avaliações
- Three Phase Inverter With Synergy Technology: SE50K / SE55K / SE82.8KDocumento2 páginasThree Phase Inverter With Synergy Technology: SE50K / SE55K / SE82.8KLeeAinda não há avaliações
- Adjusting The Mike EQ On The Yaesu FT 950 Written by Bob HeilDocumento3 páginasAdjusting The Mike EQ On The Yaesu FT 950 Written by Bob HeilSergioMarcosMarascaAinda não há avaliações
- Battery Change: Swisslite, Signature Lite, Midnite Manager, Midnite MinichampDocumento2 páginasBattery Change: Swisslite, Signature Lite, Midnite Manager, Midnite MinichampmarcusmagusAinda não há avaliações
- A Guide To Laptop Repair - Do Not Miss An Excellent OpportunityDocumento3 páginasA Guide To Laptop Repair - Do Not Miss An Excellent OpportunityalexAinda não há avaliações
- Fast Cmos Octal Registered Transceivers: IDT29FCT52AT/BT/CT/DT IDT29FCT2052AT/BT/CT IDT29FCT53AT/BT/CTDocumento8 páginasFast Cmos Octal Registered Transceivers: IDT29FCT52AT/BT/CT/DT IDT29FCT2052AT/BT/CT IDT29FCT53AT/BT/CTStuxnetAinda não há avaliações
- CSD Series Current Devices-Solid Core: Installation InstructionsDocumento5 páginasCSD Series Current Devices-Solid Core: Installation InstructionsEstevan LutzAinda não há avaliações
- Physics 2 Vsaq 1Documento15 páginasPhysics 2 Vsaq 1Shiva ShivaAinda não há avaliações