Você também pode gostar
- Clarke 1997Documento15 páginasClarke 1997Daniela PerlecheAinda não há avaliações
- Improving Urban Growth Forecasting With Cellular Automata: A Case Study For Hervey BayDocumento6 páginasImproving Urban Growth Forecasting With Cellular Automata: A Case Study For Hervey BayKhasmad AriansyahAinda não há avaliações
- Sponge Cities Emerging Approaches Challenges and Opportunities-5-2Documento10 páginasSponge Cities Emerging Approaches Challenges and Opportunities-5-2Hector Alfredo Gutierrez RomeroAinda não há avaliações
- Modeling The Impact of Development Policies and Climate - 2021 - Landscape andDocumento15 páginasModeling The Impact of Development Policies and Climate - 2021 - Landscape andImagine boyAinda não há avaliações
- Land Use Change DissertationDocumento5 páginasLand Use Change DissertationNeedHelpWithPaperSingapore100% (1)
- Thesis On Land Use ChangeDocumento9 páginasThesis On Land Use Changeelizabethsnyderdesmoines100% (2)
- Document PDFDocumento2 páginasDocument PDFJack RustAinda não há avaliações
- Sustainability 09 00431Documento19 páginasSustainability 09 00431Mustafa AhmedAinda não há avaliações
- A Methodological Approach To Urban Land-Use Change Modeling Using Infill Development Pattern - A Case Study in Tabriz, IranDocumento15 páginasA Methodological Approach To Urban Land-Use Change Modeling Using Infill Development Pattern - A Case Study in Tabriz, IranShanmathi RekhaAinda não há avaliações
- Kaushaletal 2014trackingurbanevolutionDocumento22 páginasKaushaletal 2014trackingurbanevolutiontoniaAinda não há avaliações
- Integration of An Urban Simulation Model and An Urban Ecosystem ModelDocumento6 páginasIntegration of An Urban Simulation Model and An Urban Ecosystem ModelSudharsanamurthy PunniamurthyAinda não há avaliações
- Zellner LinkingMODFLOWDocumento12 páginasZellner LinkingMODFLOWJerome JeitanyAinda não há avaliações
- Research FrameworkDocumento2 páginasResearch FrameworkYusuf RahadianAinda não há avaliações
- Spatial Logistic Regression and GIS To Model Rural-Urban Land ConversionDocumento21 páginasSpatial Logistic Regression and GIS To Model Rural-Urban Land ConversionKirana KenjiiAinda não há avaliações
- Field Simulation of Urban Surfaces Runoff and Estimation of Runoff With Experimental Curve NumbersDocumento10 páginasField Simulation of Urban Surfaces Runoff and Estimation of Runoff With Experimental Curve NumbersRAFAELAinda não há avaliações
- Reading 1. Growing Cities SustainablyDocumento18 páginasReading 1. Growing Cities SustainablySushil KhadkaAinda não há avaliações
- Journal of HydrologyDocumento12 páginasJournal of HydrologyILHAM ALIAinda não há avaliações
- CompletingDocumento15 páginasCompletinganakuettehAinda não há avaliações
- Literature Review Land Use Land Cover ChangeDocumento8 páginasLiterature Review Land Use Land Cover ChangeafduadazaAinda não há avaliações
- A Method To Analyse Neighbourhood Characteristics of Land Use PatternsDocumento24 páginasA Method To Analyse Neighbourhood Characteristics of Land Use PatternsMinisoft2002Ainda não há avaliações
- An Integrated GIS-based Analysis System For Land-Use Management of Lake Areas in Urban Fringe PDFDocumento14 páginasAn Integrated GIS-based Analysis System For Land-Use Management of Lake Areas in Urban Fringe PDFMaicol Camargo HernandezAinda não há avaliações
- Effect of Lulc Change On Surface Runoff in Urbanization AreaDocumento13 páginasEffect of Lulc Change On Surface Runoff in Urbanization AreaShilpi GuptaAinda não há avaliações
- 9 AbdelGalilDocumento19 páginas9 AbdelGalilharendraAinda não há avaliações
- Urban EssayDocumento6 páginasUrban EssaypuitengggAinda não há avaliações
- Modeling Land Use Decisions With Bayesian NetworksDocumento12 páginasModeling Land Use Decisions With Bayesian NetworksANDREA FERROAinda não há avaliações
- Chapter 2 Literature Review: 2.1 Urban Total Water UseDocumento33 páginasChapter 2 Literature Review: 2.1 Urban Total Water UseRaju KINGAinda não há avaliações
- A Spatial Explicit Allocation Procedure For Modelling The Pattern of Land Use Change Based Upon Actual Land UseDocumento17 páginasA Spatial Explicit Allocation Procedure For Modelling The Pattern of Land Use Change Based Upon Actual Land UsefcordAinda não há avaliações
- Importance of Urban Development Scenarios For Urban Water Infrastructure Planning and ManagementDocumento9 páginasImportance of Urban Development Scenarios For Urban Water Infrastructure Planning and ManagementRay chijiokeAinda não há avaliações
- AC181733 D 01Documento28 páginasAC181733 D 01Helbert CostaAinda não há avaliações
- Infrastructure Development, Residential Growth and Impacts On Public Service ExpenditureDocumento18 páginasInfrastructure Development, Residential Growth and Impacts On Public Service ExpenditureDhaniAinda não há avaliações
- Plata Rocha Et Al 2011 Simulating Urban Growth Scenarios Using Gis and Multicriteria Analysis Techniques A Case StudyDocumento21 páginasPlata Rocha Et Al 2011 Simulating Urban Growth Scenarios Using Gis and Multicriteria Analysis Techniques A Case Studycaitriona leeAinda não há avaliações
- Water: FF Modeling and Its Application at ADocumento20 páginasWater: FF Modeling and Its Application at Akbal100% (1)
- (2013) Land Use Land Cover Dynamics in A Rapidly Urbanising Landscape - T.V. Ramachandra, Aithal H. Bharath, S. VinayDocumento12 páginas(2013) Land Use Land Cover Dynamics in A Rapidly Urbanising Landscape - T.V. Ramachandra, Aithal H. Bharath, S. Vinaypranav vighneshAinda não há avaliações
- Urban Forestry & Urban Greening: A A B BDocumento11 páginasUrban Forestry & Urban Greening: A A B BBarış KaraAinda não há avaliações
- SonamDocumento11 páginasSonammtechthesis23Ainda não há avaliações
- Chapter 2Documento9 páginasChapter 2abdulrasheedmansur66Ainda não há avaliações
- Spatial Prediction in HydrologyDocumento21 páginasSpatial Prediction in HydrologyOfee ZaRaagoozaaAinda não há avaliações
- Sustainable Urban Landscapes: Making The Case For The Development of An Improved Management SystemDocumento8 páginasSustainable Urban Landscapes: Making The Case For The Development of An Improved Management SystemAnonymous TZRsMaGAinda não há avaliações
- 2003 - ClaphamDocumento19 páginas2003 - ClaphamS.VigneshwaranAinda não há avaliações
- Bernhardt y Palmer 2007Documento14 páginasBernhardt y Palmer 2007Kiosko San JoséAinda não há avaliações
- Wang 2018Documento16 páginasWang 2018soumenAinda não há avaliações
- BilascoDocumento10 páginasBilascohcsrecsAinda não há avaliações
- Research in Transportation Business & Management: Paulus Teguh AditjandraDocumento12 páginasResearch in Transportation Business & Management: Paulus Teguh AditjandraHAI LIEN NGOCAinda não há avaliações
- Assignment 2Documento20 páginasAssignment 2chengdongdongdaleAinda não há avaliações
- 18 Urban Storm Water RegulationsDocumento4 páginas18 Urban Storm Water RegulationscakhoaAinda não há avaliações
- Ba Revised Proposal - Abigail.19.05.23Documento20 páginasBa Revised Proposal - Abigail.19.05.23anakuettehAinda não há avaliações
- Tight Coupling UFMArcGIS For Simulating Inundation Depth in Densely Area S. H. KangDocumento8 páginasTight Coupling UFMArcGIS For Simulating Inundation Depth in Densely Area S. H. KangSulfi AniAinda não há avaliações
- 2016 - Cellular Automata Modeling Approaches To Forecast Urban Growth For Adana Turkey A Comparative Approach - Suha BerberogluDocumento17 páginas2016 - Cellular Automata Modeling Approaches To Forecast Urban Growth For Adana Turkey A Comparative Approach - Suha Berberoglusamarth bhatiaAinda não há avaliações
- A Review of The Revised Universal Soil Loss EquatiDocumento34 páginasA Review of The Revised Universal Soil Loss EquatiMaulana IbrahimAinda não há avaliações
- Modeling The Ecological Niche of Long Term Land Use Chang 2016 Ecological inDocumento6 páginasModeling The Ecological Niche of Long Term Land Use Chang 2016 Ecological inPasajera En TranceAinda não há avaliações
- New Highways and Land Use Change Results PDFDocumento23 páginasNew Highways and Land Use Change Results PDFandifa febianaAinda não há avaliações
- Urban StormwaterDocumento17 páginasUrban StormwaterZerihun AlemayehuAinda não há avaliações
- Beyond Drainage: The Role of SUDS in The Mitigation of Urban Heat Island EffectsDocumento8 páginasBeyond Drainage: The Role of SUDS in The Mitigation of Urban Heat Island Effectsm_fahmy2010Ainda não há avaliações
- Hess 2019 347Documento27 páginasHess 2019 347thin thinAinda não há avaliações
- Development of A Framework For The Valuation of Eco-System Services of Green InfrastructureDocumento7 páginasDevelopment of A Framework For The Valuation of Eco-System Services of Green InfrastructureVaruniJayasooriyaAinda não há avaliações
- Beighley Eggert Etal 2009Documento15 páginasBeighley Eggert Etal 2009Mars TinAinda não há avaliações
- Overview of Land Use Transport Models: January 2004Documento20 páginasOverview of Land Use Transport Models: January 2004Transport PlannersAinda não há avaliações
- Applying Integrated Urban Water Management Concepts A Review of Australian ExperienceDocumento18 páginasApplying Integrated Urban Water Management Concepts A Review of Australian ExperienceDody AdiAinda não há avaliações
- Amritsar Jamnagar Pavement Crust ThicknessDocumento5 páginasAmritsar Jamnagar Pavement Crust ThicknessPurshottam SharmaAinda não há avaliações
- 2003 - Serriano - Form Follows SoftwareDocumento21 páginas2003 - Serriano - Form Follows SoftwareMina Hazal TasciAinda não há avaliações
- W12 1321 01 ADocumento19 páginasW12 1321 01 ALucy SimmondsAinda não há avaliações
- Struktur Baja 1Documento33 páginasStruktur Baja 1Agung S NurcahyanaAinda não há avaliações
- Shunt ResistorDocumento7 páginasShunt ResistorAsghar AliAinda não há avaliações
- TIMSS Booklet 1Documento11 páginasTIMSS Booklet 1Hrid 2Ainda não há avaliações
- QP NTSE Stage 1 2016 17 AndhraPradeshDocumento27 páginasQP NTSE Stage 1 2016 17 AndhraPradeshsudhir_narang_3Ainda não há avaliações
- Using Synonyms As Context CluesDocumento11 páginasUsing Synonyms As Context Cluesapi-405390959Ainda não há avaliações
- thống số cụm phanh sau 777E KYDDocumento2 páginasthống số cụm phanh sau 777E KYDlongcpqn95Ainda não há avaliações
- SMAC Actuators User ManualDocumento52 páginasSMAC Actuators User ManualGabo DuarAinda não há avaliações
- Nps 5638Documento8 páginasNps 5638vamsi_1990Ainda não há avaliações
- Criminological Research 2023Documento41 páginasCriminological Research 2023Justin Jade AlmerezAinda não há avaliações
- Transition Elements Final 1Documento44 páginasTransition Elements Final 1Venkatesh MishraAinda não há avaliações
- Netway N4PS2037B CAT6 UTP Cable (Indoor)Documento1 páginaNetway N4PS2037B CAT6 UTP Cable (Indoor)Wearn Jian LaiAinda não há avaliações
- Cable Net StructuresDocumento18 páginasCable Net StructuresRimon GawandeAinda não há avaliações
- WPH04 01 Que 20160118Documento28 páginasWPH04 01 Que 20160118josekadaAinda não há avaliações
- 03 - Random Effect ModelDocumento10 páginas03 - Random Effect ModelAdji Pelangi SaputriAinda não há avaliações
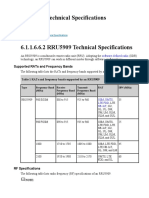
- RRU5909 Technical SpecificationsDocumento7 páginasRRU5909 Technical SpecificationsDmitry059100% (1)
- Bgy. Poblacion SwaDocumento33 páginasBgy. Poblacion SwaKim simyunnAinda não há avaliações
- En 2014 New Brochure WebDocumento20 páginasEn 2014 New Brochure WebSasa NackovicAinda não há avaliações
- Chapter OverviewDocumento57 páginasChapter OverviewWajiha SharifAinda não há avaliações
- Ak98 Preset ListDocumento21 páginasAk98 Preset ListHichem NaghmouchiAinda não há avaliações
- PL-SQL FunctionsDocumento130 páginasPL-SQL Functionswasim ahmed100% (1)
- Unit 9: Areas and PerimetersDocumento22 páginasUnit 9: Areas and PerimetersSanchit GargAinda não há avaliações
- Aveva Pdms v12.0 Sp6.25 Full Software 2014 DownloadDocumento1 páginaAveva Pdms v12.0 Sp6.25 Full Software 2014 DownloadMegatoreAinda não há avaliações
- Conic SectionDocumento9 páginasConic SectionJomana MacalnasAinda não há avaliações
- Compacted Graphite Iron - Mechanical and Physical Properties For Engine DesignDocumento22 páginasCompacted Graphite Iron - Mechanical and Physical Properties For Engine DesignThanhluan NguyenAinda não há avaliações
- HW7 A SolutionsDocumento6 páginasHW7 A Solutionsmmsingh91100% (1)
- Lecture Slides: Shigley's Mechanical Engineering DesignDocumento95 páginasLecture Slides: Shigley's Mechanical Engineering DesignpurnaAinda não há avaliações
- AlkylationDocumento42 páginasAlkylationRafi Algawi100% (1)