Você também pode gostar
- Exercices d'intégrales de lignes, de surfaces et de volumesNo EverandExercices d'intégrales de lignes, de surfaces et de volumesAinda não há avaliações
- Exercices d'intégrales et d'équations intégro-différentiellesNo EverandExercices d'intégrales et d'équations intégro-différentiellesAinda não há avaliações
- Epreuve MMCDocumento2 páginasEpreuve MMCmohamed habibe100% (1)
- Examens Et SolutionsDocumento24 páginasExamens Et Solutionsfaid ossamaAinda não há avaliações
- Devoir MecaniqueDocumento2 páginasDevoir MecaniquePreparation TafemAinda não há avaliações
- CCP Tsi 2018 Physique Chimie CorrigeDocumento13 páginasCCP Tsi 2018 Physique Chimie CorrigeIsmAil EneGadiAinda não há avaliações
- T A A T A U: Exercice 1Documento5 páginasT A A T A U: Exercice 1moha heroAinda não há avaliações
- GM DS4-2015 CorrigeDocumento5 páginasGM DS4-2015 Corrigeahmed TVAinda não há avaliações
- MMCDocumento178 páginasMMCDeanira Rafaela Tirado FabianAinda não há avaliações
- Espace Vectoriel NormeeDocumento8 páginasEspace Vectoriel NormeeSAra JamilAinda não há avaliações
- Cours Cinematique Du ContactDocumento2 páginasCours Cinematique Du ContactMiguel Clovis Kam100% (1)
- (Cin) (TD) Manege Pieuvre-2Documento2 páginas(Cin) (TD) Manege Pieuvre-2Omaima BelgacemAinda não há avaliações
- Chapitre4 CisaillementDocumento9 páginasChapitre4 CisaillementDawoud MayoufAinda não há avaliações
- Devoir RégulationDocumento1 páginaDevoir RégulationAshraf TrescaAinda não há avaliações
- 6202Documento53 páginas6202MohamedAmineDabachiAinda não há avaliações
- Examen Final de Vibrations 2016solutionDocumento3 páginasExamen Final de Vibrations 2016solutionifati100% (1)
- 03 Notion de Moment TDDocumento3 páginas03 Notion de Moment TDN'ganmaAinda não há avaliações
- TD Integ CurvDocumento1 páginaTD Integ CurvMohamed OuaggaAinda não há avaliações
- Chapitre 4 EngrenagesDroitsDocumento20 páginasChapitre 4 EngrenagesDroitsKaram QaoubAinda não há avaliações
- TD 4 CorrDocumento5 páginasTD 4 CorrMeng HeangAinda não há avaliações
- Géometrie de MassesDocumento4 páginasGéometrie de MasseskajtiAinda não há avaliações
- David NOËL - TD de RDM - Relais ÉlectromagnétiqueDocumento1 páginaDavid NOËL - TD de RDM - Relais ÉlectromagnétiqueCesaire DanAinda não há avaliações
- DS2 1Documento5 páginasDS2 1Braxt MwIra GibecièreAinda não há avaliações
- TD de Physique N o 1 - Mécanique Du PointDocumento11 páginasTD de Physique N o 1 - Mécanique Du PointIbrahima Diagne DiengAinda não há avaliações
- Outils Mathématique Pour PhysiqueDocumento22 páginasOutils Mathématique Pour Physiqueabdelouahab bouchama100% (1)
- 117 Serie Mecanique Du Point SMPC Smia s1 Cinematique Changement ReferentielDocumento9 páginas117 Serie Mecanique Du Point SMPC Smia s1 Cinematique Changement ReferentielMohamed MezianiAinda não há avaliações
- MN I Ver01 Part01Documento30 páginasMN I Ver01 Part01Nathaniel Nerquaye-tetteh100% (1)
- Théorie Mecanismes Etude de Cas-MaxpidDocumento25 páginasThéorie Mecanismes Etude de Cas-MaxpidMerv Bouda100% (1)
- (Mam) (TD) Modelisation Des Actions MecaniquesDocumento2 páginas(Mam) (TD) Modelisation Des Actions MecaniquesMATOUMBA PAULIN100% (1)
- Analyse S2 Chap3Documento19 páginasAnalyse S2 Chap3azzamAinda não há avaliações
- Tenseur Des Contraintes PDFDocumento42 páginasTenseur Des Contraintes PDFRamiro VillaAinda não há avaliações
- Schéma Aux Différences Finies Pour L'équation Des OndesDocumento55 páginasSchéma Aux Différences Finies Pour L'équation Des Ondessambiani edwardAinda não há avaliações
- TD Correction Torseur Cin Dyn PFD TecDocumento22 páginasTD Correction Torseur Cin Dyn PFD TecSd instruAinda não há avaliações
- Rdmtorseurdecohesion PDFDocumento4 páginasRdmtorseurdecohesion PDFMustafa MoussaouiAinda não há avaliações
- Robotique: Enseignant: Jean-Philippe RobergeDocumento45 páginasRobotique: Enseignant: Jean-Philippe RobergerabehvillaAinda não há avaliações
- Chap1 Sinusoide PhaseurDocumento52 páginasChap1 Sinusoide Phaseuryq6t9c2q8mAinda não há avaliações
- Espaces Normés - Fonctions LipschitziennesDocumento3 páginasEspaces Normés - Fonctions LipschitziennesHamza PrintoOsAinda não há avaliações
- Edilivre Analyse Des Structures Hyperstatiques Recueil D ExemplesDocumento20 páginasEdilivre Analyse Des Structures Hyperstatiques Recueil D ExempleskovaryAinda não há avaliações
- Support CM1 - EnspdDocumento83 páginasSupport CM1 - Enspdappoloniustonye145Ainda não há avaliações
- Cours RDMDocumento30 páginasCours RDMSandratra NavalonaAinda não há avaliações
- 1-Liaisons en Parallèles: X Z Z XDocumento12 páginas1-Liaisons en Parallèles: X Z Z XLarbi Elbakkali100% (1)
- 1-Mouvement D - Un Point Sur Un Rail Circulaire CorrectionDocumento3 páginas1-Mouvement D - Un Point Sur Un Rail Circulaire CorrectionOmar OuAinda não há avaliações
- Chapitre 1 Deformations Milieu ContinuDocumento10 páginasChapitre 1 Deformations Milieu ContinuaminAinda não há avaliações
- 15 Formule D Euler Mac LaurinDocumento5 páginas15 Formule D Euler Mac LaurinSAM MANAinda não há avaliações
- Corrigé Ad2. O6 - Dimensionner en Effort L'actionneur D'un MécanismeDocumento34 páginasCorrigé Ad2. O6 - Dimensionner en Effort L'actionneur D'un MécanismeEdward AdounvoAinda não há avaliações
- 1 41MMC - Chap1Documento41 páginas1 41MMC - Chap1Wael BadriAinda não há avaliações
- Treillis RDM PDFDocumento11 páginasTreillis RDM PDFLar BoutAinda não há avaliações
- MMC - Chapitre 4 - MansouriDocumento61 páginasMMC - Chapitre 4 - MansouriBitti FaskAinda não há avaliações
- CINEMATIQUE GRAPHIQUE Preparation 214 PDFDocumento10 páginasCINEMATIQUE GRAPHIQUE Preparation 214 PDFYoussef RachidAinda não há avaliações
- TDDocumento14 páginasTDYassir Ez-znafryAinda não há avaliações
- Chap 2 - TorseursDocumento14 páginasChap 2 - Torseursandry nomenjanahryAinda não há avaliações
- Projet 2 DDocumento3 páginasProjet 2 Doudaoud.rafikAinda não há avaliações
- PolyDocumento50 páginasPolyErd NdineAinda não há avaliações
- TDDocumento6 páginasTDYassir Ez-znafryAinda não há avaliações
- CH03 - Etude Des ContraintesDocumento8 páginasCH03 - Etude Des ContraintesSERGIOAinda não há avaliações
- Sommaire: Rapport de Stage Effectue Au Lycee Technique de Nylon Douala (2022-2023)Documento21 páginasSommaire: Rapport de Stage Effectue Au Lycee Technique de Nylon Douala (2022-2023)Pënsēür Bïô R-bAinda não há avaliações
- Pompes À Eau À Entraînement MécaniqueDocumento28 páginasPompes À Eau À Entraînement MécaniqueNeoXana01100% (1)
- Application de La Maintenance - CHABA Yahya - 597Documento52 páginasApplication de La Maintenance - CHABA Yahya - 597NeoXana01Ainda não há avaliações
- 509580Documento4 páginas509580NeoXana01Ainda não há avaliações
- Le Camion Aspirateur VidangeurDocumento13 páginasLe Camion Aspirateur VidangeurNeoXana010% (1)
- Dimensionnement Sys D'entrainement PDFDocumento40 páginasDimensionnement Sys D'entrainement PDFichrakAinda não há avaliações
- Guidage en RotationDocumento2 páginasGuidage en RotationNeoXana01Ainda não há avaliações
- 6689 Modelisation Du Comportement Des Composites1 3 Lelasticite Anisotrope EnsDocumento10 páginas6689 Modelisation Du Comportement Des Composites1 3 Lelasticite Anisotrope EnsNeoXana01Ainda não há avaliações
- Guide de Reference de L'eclairageDocumento84 páginasGuide de Reference de L'eclairagekakeish100% (1)
- OCP 2012 Sarah & LamiaDocumento54 páginasOCP 2012 Sarah & LamiaNeoXana01Ainda não há avaliações
- Bourhim Alaa Eddine AnnexesDocumento80 páginasBourhim Alaa Eddine AnnexesNeoXana01Ainda não há avaliações
- Dimmensionnement de Moteur HydrauliqueDocumento1 páginaDimmensionnement de Moteur HydrauliqueNeoXana01Ainda não há avaliações
- Sn042a FR EuDocumento9 páginasSn042a FR EuNeoXana01Ainda não há avaliações
- Bourhim Alaa EddineDocumento87 páginasBourhim Alaa EddineNeoXana01100% (1)
- 6689 Modelisation Du Comportement Des Composites1 3 Lelasticite Anisotrope EnsDocumento10 páginas6689 Modelisation Du Comportement Des Composites1 3 Lelasticite Anisotrope EnsNeoXana01Ainda não há avaliações
- Formulaire Statistique InferentielleDocumento8 páginasFormulaire Statistique InferentielleNeoXana01100% (1)
- Portique Plan ArticuleDocumento24 páginasPortique Plan Articulelopir120Ainda não há avaliações
- CGP Poly CDCDocumento5 páginasCGP Poly CDCNeoXana01Ainda não há avaliações
- Module08dmecasta PDFDocumento22 páginasModule08dmecasta PDFNeoXana01Ainda não há avaliações
- Exo12 CorigéDocumento2 páginasExo12 CorigéNeoXana01Ainda não há avaliações
- TP VibrationDocumento13 páginasTP VibrationNeoXana01Ainda não há avaliações
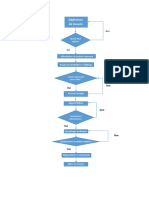
- Etapes de ProjetDocumento1 páginaEtapes de ProjetNeoXana01Ainda não há avaliações
- Avant ProjetDocumento5 páginasAvant ProjetMeriem AboutaibAinda não há avaliações
- Conception de Bases de Données (Exer)Documento31 páginasConception de Bases de Données (Exer)Serigne Saliou DiomeAinda não há avaliações
- Stage Bat I SportDocumento18 páginasStage Bat I SportNeoXana01Ainda não há avaliações
- Table Des Masses VolumiquesDocumento2 páginasTable Des Masses VolumiquesAnonymous IUfF7E67irAinda não há avaliações
- Chap 03 Chute Verticale Avec FrottementsDocumento4 páginasChap 03 Chute Verticale Avec FrottementsKhalil ArfaAinda não há avaliações
- Tiznit Ocp 2Documento42 páginasTiznit Ocp 2NeoXana01Ainda não há avaliações
- M12 Chute Libre FrottementsDocumento11 páginasM12 Chute Libre FrottementsNeoXana01Ainda não há avaliações
- Transmissiondepuissance CoursDocumento2 páginasTransmissiondepuissance CoursTriki BilelAinda não há avaliações
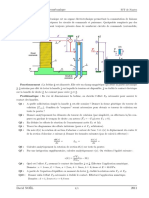
- Sujet Et Corrige Bac Sti Genie Electrotechnique Septembre 2009 Etude Des ConstructionsDocumento23 páginasSujet Et Corrige Bac Sti Genie Electrotechnique Septembre 2009 Etude Des ConstructionsNeoXana01Ainda não há avaliações
- Abberation Du Nerf VII Et Implication Ophtalmologiques DR Katumbe BineneDocumento16 páginasAbberation Du Nerf VII Et Implication Ophtalmologiques DR Katumbe Binenebin ozumbaiAinda não há avaliações
- La Palette de NarmerDocumento11 páginasLa Palette de NarmerJoseph Joshua Elom100% (1)
- PARDONDocumento31 páginasPARDONNgouo100% (1)
- Oaci Sms Module N° 5 - Risques 2008-11 (PF)Documento62 páginasOaci Sms Module N° 5 - Risques 2008-11 (PF)VVV7130100% (3)
- Cours Equadiff Supérieur 1Documento2 páginasCours Equadiff Supérieur 1L'aigle ImposantAinda não há avaliações
- Le Manchec 2002Documento5 páginasLe Manchec 2002jmmartinez6094124Ainda não há avaliações
- Origines Des MedicamentsDocumento2 páginasOrigines Des MedicamentsSalma HachamyAinda não há avaliações
- Introduction À Rore SanctificaDocumento8 páginasIntroduction À Rore SanctificasedenoAinda não há avaliações
- Devoir de Contrôle N°1 - Physique - Bac Sciences Exp (2018-2019) MR Zwidi WalidDocumento4 páginasDevoir de Contrôle N°1 - Physique - Bac Sciences Exp (2018-2019) MR Zwidi WalidMarwa BounouhAinda não há avaliações
- OPTIQUEDocumento3 páginasOPTIQUEboumlik abdellahAinda não há avaliações
- La Cause Et La Consequence Exercice Grammatical Feuille Dexercices - 35315Documento5 páginasLa Cause Et La Consequence Exercice Grammatical Feuille Dexercices - 35315Simion AIexandra AlexandraAinda não há avaliações
- Cahier Des Charges Site Web Lycee ChamplainDocumento11 páginasCahier Des Charges Site Web Lycee Champlainapi-273701348Ainda não há avaliações
- BPL LtidDocumento12 páginasBPL LtidBassirou NdiayeAinda não há avaliações
- EMC 2000 - Malformations Congénitales Du RachisDocumento18 páginasEMC 2000 - Malformations Congénitales Du RachistristanlanglaisAinda não há avaliações
- Projet2 s2 Réquisitoire CEDocumento7 páginasProjet2 s2 Réquisitoire CEFlęür D'ęspõįrAinda não há avaliações
- GrammaireDocumento23 páginasGrammaireAbdelatif EL AadiouiAinda não há avaliações
- A Chaque Jour Suffit Sa Grace-42p David SutherlandDocumento42 páginasA Chaque Jour Suffit Sa Grace-42p David SutherlandEnoc MoraAinda não há avaliações
- Le Point N°2310Documento242 páginasLe Point N°2310samAinda não há avaliações
- La Démarche ExpérimentaleDocumento2 páginasLa Démarche ExpérimentaleRachid BenhmidouAinda não há avaliações
- Eb9 Corrige Analyse Logique Prop Sub Circ Temps 032020Documento2 páginasEb9 Corrige Analyse Logique Prop Sub Circ Temps 032020Marie-Laure BejjanyAinda não há avaliações
- Etude Des Propriétés Physicochimiques Et Biologiques de Thymus Vulgaris L.Documento111 páginasEtude Des Propriétés Physicochimiques Et Biologiques de Thymus Vulgaris L.Anissa AissouAinda não há avaliações
- Balance Ton Quoi - Angèle - Doc Ben Au Ukulélé Patreon PDFDocumento4 páginasBalance Ton Quoi - Angèle - Doc Ben Au Ukulélé Patreon PDFLívia Fragoso PimentelAinda não há avaliações
- Pourquoi Le Débat Avec Les Antipédagogues Est Impossible CharlotDocumento3 páginasPourquoi Le Débat Avec Les Antipédagogues Est Impossible CharlotPhilippe WatrelotAinda não há avaliações
- 9782100721498Documento20 páginas9782100721498Salah El MasoudiAinda não há avaliações
- La Rochefoucauld - MaximesDocumento77 páginasLa Rochefoucauld - MaximesBogdan Cineva100% (1)