Você também pode gostar
- 07 - Control Todo o NadaDocumento22 páginas07 - Control Todo o Nadaguns_anroses5064Ainda não há avaliações
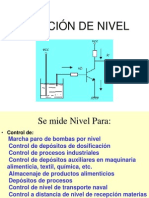
- Medición de NivelDocumento37 páginasMedición de NivelEDdy Santiago Valle ArceAinda não há avaliações
- Sensores de AproximaciónDocumento21 páginasSensores de AproximaciónEDdy Santiago Valle ArceAinda não há avaliações
- Interfaces de PotenciaDocumento44 páginasInterfaces de PotenciaEDdy Santiago Valle Arce0% (1)
- Válvula AntirretornoDocumento7 páginasVálvula AntirretornoEDdy Santiago Valle ArceAinda não há avaliações
- Fibra Optica AereaDocumento24 páginasFibra Optica AereaEDdy Santiago Valle Arce100% (2)
- PLD Dispitivos Logicos Programables ExpoDocumento38 páginasPLD Dispitivos Logicos Programables ExpoEDdy Santiago Valle ArceAinda não há avaliações
- Diseño de Transformador de Baja PotenciaDocumento6 páginasDiseño de Transformador de Baja PotenciaEDdy Santiago Valle Arce100% (1)
- Sintesis Estructura CristalinaDocumento3 páginasSintesis Estructura CristalinaHugo GarzaAinda não há avaliações
- Lab 1. Electronica Practica 1Documento11 páginasLab 1. Electronica Practica 1Alfredo AlvarezAinda não há avaliações
- Reguladores de Voltaje IntegradosDocumento3 páginasReguladores de Voltaje IntegradosYeiiSon CarvajalAinda não há avaliações
- Lab 6 Analoga JPDocumento12 páginasLab 6 Analoga JPJUAN PABLO TORRES CONTRERASAinda não há avaliações
- Laboratorio Amp Calse BDocumento1 páginaLaboratorio Amp Calse BIVAN DAVID OÑATE CONTRERASAinda não há avaliações
- Electronica de PotenciaDocumento84 páginasElectronica de PotenciaClAuu Huayllas PomaAinda não há avaliações
- Pre - Informe 1 Electrónica 2Documento7 páginasPre - Informe 1 Electrónica 2Esteban Meneses PAinda não há avaliações
- Informe WordDocumento8 páginasInforme WordPatrickGustavoSuyoMarinAinda não há avaliações
- AISLANTESDocumento4 páginasAISLANTESpataproAinda não há avaliações
- Laboratorio n1 de Maquinas ElectricasDocumento10 páginasLaboratorio n1 de Maquinas ElectricasAngel Boza HAinda não há avaliações
- Clase 1 IntroduccionDocumento19 páginasClase 1 IntroduccionDiana Lorena Polo GilAinda não há avaliações
- Diseno y Construccion Marcador Electronico PDFDocumento75 páginasDiseno y Construccion Marcador Electronico PDFNelson MartinezAinda não há avaliações
- Circuitos ElectrónicosDocumento20 páginasCircuitos ElectrónicosERICK LIVIA MENDEZAinda não há avaliações
- FOTORRESISTENCIASDocumento4 páginasFOTORRESISTENCIASluisAinda não há avaliações
- Qdoc - Tips - Curso de Reparacion de Celulares y Micro ElectroniDocumento41 páginasQdoc - Tips - Curso de Reparacion de Celulares y Micro Electroni0rdoAinda não há avaliações
- Ventajas Del HVDCDocumento7 páginasVentajas Del HVDCEdward OrcconAinda não há avaliações
- Informe Previo Circuitos TrifasicosDocumento5 páginasInforme Previo Circuitos TrifasicosRay Broncano del AguilaAinda não há avaliações
- Tecnologia de Pantallas PlanasDocumento46 páginasTecnologia de Pantallas PlanasJesus Bueno Rueda100% (1)
- Amplificador Clase B en Simetría ComplementariaDocumento7 páginasAmplificador Clase B en Simetría ComplementariaValeria Andrea Nina ArrescurenagaAinda não há avaliações
- AmplificadorDocumento3 páginasAmplificadorLuis Manuel Sanchez CabanillasAinda não há avaliações
- Reforma en Bandejas de CDDocumento2 páginasReforma en Bandejas de CDkmaryAinda não há avaliações
- Act 4 Ing de MaterialesDocumento20 páginasAct 4 Ing de MaterialesRonald Ibañez RodriguezAinda não há avaliações
- Cuasi 120w To3 PDFDocumento14 páginasCuasi 120w To3 PDFRaymundo RaygozaAinda não há avaliações
- Control de Posicion Motor - ElectronicaDocumento5 páginasControl de Posicion Motor - ElectronicaErick Stanley Arevalo LopezAinda não há avaliações
- Consola MezcladoraDocumento202 páginasConsola Mezcladoravictor sisaAinda não há avaliações
- Componentes Eléctricos LinealesDocumento36 páginasComponentes Eléctricos LinealesKevin SCAinda não há avaliações
- TERMOPARESDocumento4 páginasTERMOPARESWalter Mamani CcasaAinda não há avaliações
- Norma TivaDocumento22 páginasNorma TivaGloria OspinaAinda não há avaliações
- Asociación de Resistencias Practica 9 UFPSDocumento12 páginasAsociación de Resistencias Practica 9 UFPSCristhian Camilo RoaAinda não há avaliações