Você também pode gostar
- Dimensional Engineering: Based On The ASME Y14.5M-1994 Dimensioning and Tolerancing StandardDocumento96 páginasDimensional Engineering: Based On The ASME Y14.5M-1994 Dimensioning and Tolerancing StandardNarasimhamurthy AdaviAinda não há avaliações
- Shear and Moment DiagramsDocumento12 páginasShear and Moment DiagramsJonathan Llanes Siervo100% (2)
- Shear and Moment DiagramsDocumento12 páginasShear and Moment DiagramsJonathan Llanes Siervo100% (2)
- Statics and Strength FormulasDocumento1 páginaStatics and Strength FormulasRichard TsengAinda não há avaliações
- Statics and Strength FormulasDocumento1 páginaStatics and Strength FormulasRichard TsengAinda não há avaliações
- Hel DynamDocumento1 páginaHel DynamPriyatosh ShuklaAinda não há avaliações
- Hel DynamDocumento1 páginaHel DynamPriyatosh ShuklaAinda não há avaliações
- Microsoft Word - Shear - CenterDocumento3 páginasMicrosoft Word - Shear - CenterPriyatosh ShuklaAinda não há avaliações
- Statics and Strength FormulasDocumento1 páginaStatics and Strength FormulasRichard TsengAinda não há avaliações
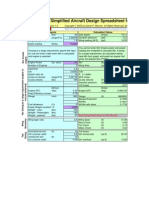
- Raymer Simplified Aircraft Design SpreadsheetDocumento13 páginasRaymer Simplified Aircraft Design SpreadsheetRajeuv GovindanAinda não há avaliações
- FluentDocumento3 páginasFluentPriyatosh ShuklaAinda não há avaliações
- Statics and Strength FormulasDocumento1 páginaStatics and Strength FormulasRichard TsengAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- ST Biology Nervous System IEP TestDocumento3 páginasST Biology Nervous System IEP TestDanielle WilsonAinda não há avaliações
- Theorizing Eco-Dystopia: Science Fiction, The Anthropocene, and The Limits of Catastrophic ImageryDocumento15 páginasTheorizing Eco-Dystopia: Science Fiction, The Anthropocene, and The Limits of Catastrophic ImageryLaura QuintanaAinda não há avaliações
- Gel Electrophoresis Lab ReportDocumento10 páginasGel Electrophoresis Lab Reportapi-31150900783% (6)
- Importance of Decision Tree AnalysisDocumento3 páginasImportance of Decision Tree AnalysisJean Grace Agustin BelmonteAinda não há avaliações
- The Remains of The Day-Excerpts-1Documento2 páginasThe Remains of The Day-Excerpts-1DajanaAinda não há avaliações
- Understanding the Difference Between Positive and Normative EconomicsDocumento21 páginasUnderstanding the Difference Between Positive and Normative EconomicsKevin Fernandez MendioroAinda não há avaliações
- Configuring Cisco Easy VPN and Easy VPN Server Using SDM: Ipsec VpnsDocumento56 páginasConfiguring Cisco Easy VPN and Easy VPN Server Using SDM: Ipsec VpnsrajkumarlodhAinda não há avaliações
- Data Sheet 6EP1457-3BA00: InputDocumento4 páginasData Sheet 6EP1457-3BA00: InputSeyyed Amir MohmmadiAinda não há avaliações
- 100 Seniman Yang Membentuk Sejarah DuniaDocumento134 páginas100 Seniman Yang Membentuk Sejarah DuniaIBRAHIM S.Sos,IAinda não há avaliações
- Link L5 Assessment AKDocumento11 páginasLink L5 Assessment AKJoanna MajczykAinda não há avaliações
- Nodal Officer Wise Student ListDocumento48 páginasNodal Officer Wise Student ListguerellaAinda não há avaliações
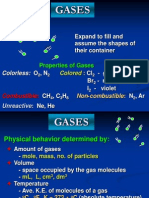
- Properties and Behavior of GasesDocumento34 páginasProperties and Behavior of GasesPaul Jeremiah Serrano NarvaezAinda não há avaliações
- A Better Kiln CoatingDocumento2 páginasA Better Kiln Coatingamir100% (4)
- Yealink Device Management Platform: Key FeaturesDocumento3 páginasYealink Device Management Platform: Key FeaturesEliezer MartinsAinda não há avaliações
- IFU Egg Yolk Tellurite EmulsionDocumento4 páginasIFU Egg Yolk Tellurite EmulsionoktaAinda não há avaliações
- 09-04-2023 - Plumbing BOQ Without RatesDocumento20 páginas09-04-2023 - Plumbing BOQ Without RatesK. S. Design GroupAinda não há avaliações
- The 5th Edition of The World Health Organization Classification - of Haematolymphoid Tumours Myeloid and Histiocytic - Dendritic NeoplasmsDocumento17 páginasThe 5th Edition of The World Health Organization Classification - of Haematolymphoid Tumours Myeloid and Histiocytic - Dendritic NeoplasmsADMINISTRACION LABORATORIO INTERMEDICAAinda não há avaliações
- Syllabus 2012 Singing 20190122Documento91 páginasSyllabus 2012 Singing 20190122suzypienaarAinda não há avaliações
- GX Audit Internal Audit Risk and Opportunities For 2022Documento26 páginasGX Audit Internal Audit Risk and Opportunities For 2022Muhammad SamiAinda não há avaliações
- Performance of Filler Material in GabionsDocumento4 páginasPerformance of Filler Material in GabionsPreetham N KumarAinda não há avaliações
- Theories & Models of LearningDocumento33 páginasTheories & Models of LearningAna Paulina Suárez CervantesAinda não há avaliações
- Dams of India - 6921143 - 2022 - 08 - 22 - 03 - 48Documento10 páginasDams of India - 6921143 - 2022 - 08 - 22 - 03 - 48deepak kumar pandeyAinda não há avaliações
- SPXDocumento6 páginasSPXapi-3700460Ainda não há avaliações
- Galen and The Antonine Plague - Littman (1973)Documento14 páginasGalen and The Antonine Plague - Littman (1973)Jörgen Zackborg100% (1)
- Space Oddity Chords (Ver 2) by David Bowie Tabs at Ultimate Guitar ArchiveDocumento3 páginasSpace Oddity Chords (Ver 2) by David Bowie Tabs at Ultimate Guitar ArchiveEMMANUEL ARNOULDAinda não há avaliações
- Mahabharata Book 9 Shalya ParvaDocumento413 páginasMahabharata Book 9 Shalya Parvaavacdis1969Ainda não há avaliações
- MAMALUMPONG JORDAN A. BSN-3 Literature ReviewDocumento3 páginasMAMALUMPONG JORDAN A. BSN-3 Literature ReviewJordan Abosama MamalumpongAinda não há avaliações
- LAC and Location UpdateDocumento10 páginasLAC and Location UpdateAndres RockeAinda não há avaliações
- Sample Management Representation Letter Type II SAS 70 AuditDocumento2 páginasSample Management Representation Letter Type II SAS 70 Auditaaldawi0% (1)
- Instruction Manual for Capacitor Voltage TransformersDocumento22 páginasInstruction Manual for Capacitor Voltage Transformerst.o.i.n.gAinda não há avaliações