Você também pode gostar
- Connections in Precast Concrete Structures - Effects of Restrained Creep and ShrinkageDocumento20 páginasConnections in Precast Concrete Structures - Effects of Restrained Creep and Shrinkageunix0123Ainda não há avaliações
- Nonlinear Analysis of Cable Structures by PDFDocumento7 páginasNonlinear Analysis of Cable Structures by PDFmorteza90Ainda não há avaliações
- Cable Element Analysis TechniquesDocumento16 páginasCable Element Analysis TechniquesPankaj_Taneja_9684Ainda não há avaliações
- Interaction Formulae For Members Subjected To Bending and Axial Compression in EC3-Method 2 Approach-Greiner-JCSRDocumento14 páginasInteraction Formulae For Members Subjected To Bending and Axial Compression in EC3-Method 2 Approach-Greiner-JCSRkostas formulagrAinda não há avaliações
- Shear Resistance of Connections Between Reinforced Concrete Linear Precast ElementsDocumento34 páginasShear Resistance of Connections Between Reinforced Concrete Linear Precast ElementspicottAinda não há avaliações
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionAinda não há avaliações
- Bracing of Steel-Concrete Composite Bridge During ConstructionDocumento10 páginasBracing of Steel-Concrete Composite Bridge During Constructionparvaneh.eAinda não há avaliações
- Punching of Concrete Slabs Without Shear Reinforcement - GuandaliniDocumento9 páginasPunching of Concrete Slabs Without Shear Reinforcement - GuandaliniAnonymous YAHRBwSYnAinda não há avaliações
- Punching Shear Strength of Reinforced Concrete Slabs Without Transverse Reinforcement by Aurelio Muttoni PDFDocumento16 páginasPunching Shear Strength of Reinforced Concrete Slabs Without Transverse Reinforcement by Aurelio Muttoni PDFNuttawuit BigGyAinda não há avaliações
- Management of Fatigue Cracking West Gate Bridge, Melbourne PDFDocumento9 páginasManagement of Fatigue Cracking West Gate Bridge, Melbourne PDFAVSSSAinda não há avaliações
- Vibration Serviceability of Footbridges Under Human-Induced Excitation: A Literature ReviewDocumento74 páginasVibration Serviceability of Footbridges Under Human-Induced Excitation: A Literature ReviewFernanda LagoAinda não há avaliações
- Modeling of Cable Stayed BridgesDocumento133 páginasModeling of Cable Stayed Bridgessams1649_368711238Ainda não há avaliações
- The Olympic Stadium in Munich, GermanyDocumento13 páginasThe Olympic Stadium in Munich, GermanykmarshalAinda não há avaliações
- Submitted By: Under The Guidance: Dr. K. AshaDocumento23 páginasSubmitted By: Under The Guidance: Dr. K. AshaMohammed AhmedAinda não há avaliações
- Practical Formula Cable TensionDocumento6 páginasPractical Formula Cable TensionAlma M. LaraAinda não há avaliações
- Assessment Procedure For Floor Vibrations Due To WalkingDocumento14 páginasAssessment Procedure For Floor Vibrations Due To WalkingAhmedFranzAinda não há avaliações
- Connections To Concrete-Filled Steel TubesDocumento2 páginasConnections To Concrete-Filled Steel TubesMohamad RezaAinda não há avaliações
- Web 5133Documento118 páginasWeb 5133bbblguAinda não há avaliações
- Literature Review of Cable Stayed BridgeDocumento8 páginasLiterature Review of Cable Stayed Bridgeea53sm5wAinda não há avaliações
- Prestressed General PrinciplesDocumento7 páginasPrestressed General PrinciplesdkavitiAinda não há avaliações
- The Analysis and Design of and The Evaluation of Design Actions For Reinforced Concrete Ductile Shear Wall StructuresDocumento36 páginasThe Analysis and Design of and The Evaluation of Design Actions For Reinforced Concrete Ductile Shear Wall StructuresmamandaweAinda não há avaliações
- Background Document To EN 1991-1-7 PDFDocumento62 páginasBackground Document To EN 1991-1-7 PDFPat GonzalezAinda não há avaliações
- A Re-Examination of The Theory of Suspension BridgesDocumento210 páginasA Re-Examination of The Theory of Suspension Bridgespiolenc@archivale.comAinda não há avaliações
- 4 Pierre-YvesSousesme PDFDocumento21 páginas4 Pierre-YvesSousesme PDFAhmed BesoAinda não há avaliações
- Prestressing With Unbonded Internal or External TendonsDocumento9 páginasPrestressing With Unbonded Internal or External TendonsMiguel GonzalezAinda não há avaliações
- Dissertation2004 CasarottiDocumento164 páginasDissertation2004 CasarottiDave ThompsonAinda não há avaliações
- Bridges With Multiple Cable-Stayed SpansDocumento12 páginasBridges With Multiple Cable-Stayed SpanssergioAinda não há avaliações
- 364 419Documento56 páginas364 419Ernest NavarroAinda não há avaliações
- JM8-Large Span Structure 2Documento18 páginasJM8-Large Span Structure 2jausingchiAinda não há avaliações
- Bond-Slip Behavior of Reinforced Concrete MembersDocumento10 páginasBond-Slip Behavior of Reinforced Concrete Membersbatisxuta10% (1)
- Strut and Tie PierDocumento7 páginasStrut and Tie PierYisus NuñezAinda não há avaliações
- Honshu-Shikoku Bridge Authority - Wind Resistant Design Code (2001) PDFDocumento20 páginasHonshu-Shikoku Bridge Authority - Wind Resistant Design Code (2001) PDFtony13touchAinda não há avaliações
- OtherDocumento33 páginasOthermulham leeAinda não há avaliações
- Modeling of Bridge Foundations-Lam Martin Imbsen PDFDocumento14 páginasModeling of Bridge Foundations-Lam Martin Imbsen PDFAnonymous I8dXeoAinda não há avaliações
- Mathematical Modeling of Creep and Shrinkage of ConcreteDocumento59 páginasMathematical Modeling of Creep and Shrinkage of ConcreteOliviero CabitzaAinda não há avaliações
- Decoding Eurocode 7: Andrew Bond and Andrew HarrisDocumento10 páginasDecoding Eurocode 7: Andrew Bond and Andrew HarrisPatrik AlfredssonAinda não há avaliações
- Wood 1968Documento27 páginasWood 1968szghbsgfAinda não há avaliações
- Computational Methods in Nonlinear Structural and Solid Mechanics: Papers Presented at the Symposium on Computational Methods in Nonlinear Structural and Solid MechanicsNo EverandComputational Methods in Nonlinear Structural and Solid Mechanics: Papers Presented at the Symposium on Computational Methods in Nonlinear Structural and Solid MechanicsAhmed K. NoorAinda não há avaliações
- Evaluation of Minimum Shear Reinforcement Requirements For Higher Strength ConcreteDocumento9 páginasEvaluation of Minimum Shear Reinforcement Requirements For Higher Strength ConcreteHuda JawadAinda não há avaliações
- 4 Static Behaviour of Curved BridgesDocumento27 páginas4 Static Behaviour of Curved BridgesJose LazoAinda não há avaliações
- Effect of Soil - Structure Interaction Constitutive Models On Dynamic Response of Multi - Story Buildings PDFDocumento5 páginasEffect of Soil - Structure Interaction Constitutive Models On Dynamic Response of Multi - Story Buildings PDFMirna KristiyantoAinda não há avaliações
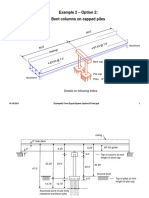
- Example2 Two Equal Spans Option2 FinalDocumento178 páginasExample2 Two Equal Spans Option2 FinalSony JsdAinda não há avaliações
- Cable Suspended Roof Structureppt CompressDocumento12 páginasCable Suspended Roof Structureppt CompressYousif MustafaAinda não há avaliações
- Pedestrian Induced Vibrations in Footbridges: Reappraisal of Code ProvisionsDocumento8 páginasPedestrian Induced Vibrations in Footbridges: Reappraisal of Code ProvisionsAlexandru IonescuAinda não há avaliações
- Experimental Study On Progressive Collapse-Resistant Behavior of Reinforced Concrete Frame StructuresDocumento7 páginasExperimental Study On Progressive Collapse-Resistant Behavior of Reinforced Concrete Frame Structureshector rodriguezAinda não há avaliações
- Methodologies for Seismic Safety Evaluation of Existing Nuclear InstallationsNo EverandMethodologies for Seismic Safety Evaluation of Existing Nuclear InstallationsAinda não há avaliações
- Numerical Analysis of Composite Steel-Concrete Columns of Arbitrary Cross SectionDocumento10 páginasNumerical Analysis of Composite Steel-Concrete Columns of Arbitrary Cross SectionNasar KhanAinda não há avaliações
- State Highway FEDERAL AID PROJECT NO. STBG-9999-07 (384) : Plan and Profile of ProposedDocumento66 páginasState Highway FEDERAL AID PROJECT NO. STBG-9999-07 (384) : Plan and Profile of Proposedcharles blairAinda não há avaliações
- Seismic Design Bridge AbutmentsDocumento4 páginasSeismic Design Bridge Abutmentsclam2014Ainda não há avaliações
- Tarmac Pre Stressed BeamsDocumento12 páginasTarmac Pre Stressed BeamsJesus LertAinda não há avaliações
- Preliminary Static Analysis of Suspension Bridges PDFDocumento8 páginasPreliminary Static Analysis of Suspension Bridges PDFp rAinda não há avaliações
- 2007 - Manual For The Assessment of Load Bearing URM Structures - Ok Ok OkDocumento101 páginas2007 - Manual For The Assessment of Load Bearing URM Structures - Ok Ok OkJuan Carlos Jiménez PachecoAinda não há avaliações
- Six Pile Cap Reinforced ConcreteDocumento9 páginasSix Pile Cap Reinforced ConcreteFaheem KhanAinda não há avaliações
- Response of Reinforced Concrete Columns To Simulated Seismic LoadingDocumento10 páginasResponse of Reinforced Concrete Columns To Simulated Seismic LoadingpicottAinda não há avaliações
- Computation of Symmetrical Free Standing StaircasesDocumento6 páginasComputation of Symmetrical Free Standing Staircaseswalaywan100% (1)
- Comparative Analysis of Composite Structure by STADD Pro SoftwareDocumento6 páginasComparative Analysis of Composite Structure by STADD Pro SoftwareIJRASETPublicationsAinda não há avaliações
- L12 - Plastic Analysis PDFDocumento9 páginasL12 - Plastic Analysis PDFSunil Kumar P GAinda não há avaliações
- MS07 1276Documento6 páginasMS07 1276Truong Viet HungAinda não há avaliações
- AISC Shapes Database v14.1Documento10 páginasAISC Shapes Database v14.1Truong Viet HungAinda não há avaliações
- Cable Dynamics - A ReviewDocumento6 páginasCable Dynamics - A ReviewTruong Viet HungAinda não há avaliações
- Simple Model of Rain-wind-Induced Vibrations of Stayed Cables - 2003 - WildeDocumento19 páginasSimple Model of Rain-wind-Induced Vibrations of Stayed Cables - 2003 - WildeTruong Viet HungAinda não há avaliações
- Cable Dynamics - A ReviewDocumento6 páginasCable Dynamics - A ReviewTruong Viet HungAinda não há avaliações
- Significance of Complex Numbers in Electrical EngineeringDocumento4 páginasSignificance of Complex Numbers in Electrical EngineeringMohsin SajjadAinda não há avaliações
- Aeromagnetic Mapping of Basement Topography in Ijebu-Ode - FullDocumento20 páginasAeromagnetic Mapping of Basement Topography in Ijebu-Ode - FullAdefemi OlaseleAinda não há avaliações
- Full Download Ebook Ebook PDF New Edexcel International Gcse Maths Revision Guide For The Grade 9 1 Course PDFDocumento47 páginasFull Download Ebook Ebook PDF New Edexcel International Gcse Maths Revision Guide For The Grade 9 1 Course PDFkatherine.rosenbeck386100% (44)
- Mechatronics Syllabus PDFDocumento77 páginasMechatronics Syllabus PDFVenkateshSrinivasanAinda não há avaliações
- 1.2 What Is Calculus and Why Do We Study ItDocumento3 páginas1.2 What Is Calculus and Why Do We Study ItMicheal JordanAinda não há avaliações
- Lucca 2008 PropilenoDocumento7 páginasLucca 2008 Propilenoreclatis14Ainda não há avaliações
- 1.b Murder Mystery Method To Solve Exact EquationDocumento24 páginas1.b Murder Mystery Method To Solve Exact EquationSyafiqah RusdiAinda não há avaliações
- DeAnna Sewell ThesisDocumento69 páginasDeAnna Sewell ThesisShokoofeAlaviAinda não há avaliações
- Maths NCERT 9th QuestionsDocumento129 páginasMaths NCERT 9th QuestionsSagar S Poojary100% (2)
- Dam Safety PDFDocumento51 páginasDam Safety PDFAndyara DuarteAinda não há avaliações
- Differential EquationsDocumento46 páginasDifferential EquationsPaulo Emmanuele BetitaAinda não há avaliações
- TWPT Quadratic Equation-01 24.05.20220Documento4 páginasTWPT Quadratic Equation-01 24.05.20220Manish Choudhary HarnawaAinda não há avaliações
- Straight Lines: Equation of A Straight Line in Reference To A Given Straight LineDocumento12 páginasStraight Lines: Equation of A Straight Line in Reference To A Given Straight LineGURUMARUTHI KUMARAinda não há avaliações
- Omer G G10 Summative Assessment - Criterion B Linear EquationDocumento6 páginasOmer G G10 Summative Assessment - Criterion B Linear EquationOmerG100% (1)
- BE CSE - Detailed SyllabusDocumento60 páginasBE CSE - Detailed SyllabusSAIDEEPAinda não há avaliações
- Air Conditioning CHED PDFDocumento2 páginasAir Conditioning CHED PDFJerico LlovidoAinda não há avaliações
- Lecture 4 - Governing Laws and Principles: Self Evaluation Questions and AnswersDocumento22 páginasLecture 4 - Governing Laws and Principles: Self Evaluation Questions and AnswersMohamedAinda não há avaliações
- Model: 2 XX Xy 2 Yy X 2 yDocumento5 páginasModel: 2 XX Xy 2 Yy X 2 ythirumalAinda não há avaliações
- Fidp Genmath 2020-2021Documento26 páginasFidp Genmath 2020-2021Lady Ann UnicoAinda não há avaliações
- BBA OldSyllabusDocumento99 páginasBBA OldSyllabusRajan NeupaneAinda não há avaliações
- Skin Effect On Rectangular ConductorsDocumento9 páginasSkin Effect On Rectangular ConductorsAnzar ShaikhAinda não há avaliações
- Api 653Documento288 páginasApi 653padalakirankumar100% (22)
- Mathematics: Textbook For Class XDocumento15 páginasMathematics: Textbook For Class XmubeennavazAinda não há avaliações
- CBSE Board Class IX MathematicsDocumento16 páginasCBSE Board Class IX MathematicsMintu KhanAinda não há avaliações
- Development of A Correlation For The Estimation of Condensate To Gas Ratio and Other Key Gas Properties From Density Molecular WeightDocumento18 páginasDevelopment of A Correlation For The Estimation of Condensate To Gas Ratio and Other Key Gas Properties From Density Molecular WeightDorothyNRAinda não há avaliações
- Math Mid Sem 1 Kiit PaperDocumento1 páginaMath Mid Sem 1 Kiit PapersellyAinda não há avaliações
- Aits 2324 FT Ii Jeem TD OfflineDocumento15 páginasAits 2324 FT Ii Jeem TD OfflineAtharv BhardwajAinda não há avaliações
- Grade-9 (2nd)Documento42 páginasGrade-9 (2nd)Jen Ina Lora-Velasco Gacutan67% (6)
- ECON 1003 - Maths For Social Sciences IDocumento4 páginasECON 1003 - Maths For Social Sciences IKalsia RobertAinda não há avaliações