Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Midterm Examination in General Physics 1Documento10 páginasMidterm Examination in General Physics 1zamora pegafi100% (2)
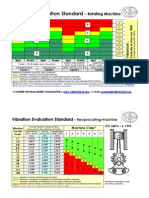
- Iso 10816 Vibration GuidelineDocumento2 páginasIso 10816 Vibration GuidelineSPIREASIA100% (10)
- Conveyor Belt Maintenance Manual 2010Documento46 páginasConveyor Belt Maintenance Manual 2010paul_lesberg100% (1)
- NETZSCH Progressing Cavity Pumps - 12 - 19Documento28 páginasNETZSCH Progressing Cavity Pumps - 12 - 19johnjoviedoAinda não há avaliações
- Master ThesisDocumento79 páginasMaster ThesisjohnjoviedoAinda não há avaliações
- Rollix Slewing Ring Installation Maintenance English PDFDocumento7 páginasRollix Slewing Ring Installation Maintenance English PDFBülent KabadayiAinda não há avaliações
- Cycloidal GearboxDocumento5 páginasCycloidal GearboxjohnjoviedoAinda não há avaliações
- Sustainable Construction MaterialsDocumento5 páginasSustainable Construction MaterialsjohnjoviedoAinda não há avaliações
- Loctite Silver Grade Anti-Seize: Technical Data SheetDocumento2 páginasLoctite Silver Grade Anti-Seize: Technical Data SheetjohnjoviedoAinda não há avaliações
- C ST A106 GRB Pipe Pressure Rating Charts Rev Dec 2012Documento4 páginasC ST A106 GRB Pipe Pressure Rating Charts Rev Dec 2012Allison MoraisAinda não há avaliações
- Up Above: Back at Base Come To LightDocumento5 páginasUp Above: Back at Base Come To LightjohnjoviedoAinda não há avaliações
- OSHA Shipyard IndustryDocumento312 páginasOSHA Shipyard IndustryNancy FigueroaAinda não há avaliações
- Quality in The Future of Manufacturing-69436 Tcm27-28552Documento43 páginasQuality in The Future of Manufacturing-69436 Tcm27-28552johnjoviedoAinda não há avaliações
- Nuclear Naval Propulsion PDFDocumento31 páginasNuclear Naval Propulsion PDFjohnjoviedoAinda não há avaliações
- Siemens PLM Resolving Electrical System Changes Eb 72273 A5 PDFDocumento8 páginasSiemens PLM Resolving Electrical System Changes Eb 72273 A5 PDFjohnjoviedoAinda não há avaliações
- Rugosidad Pintura Wei-2011-ICOM-CC-perceptie-ruwheid PDFDocumento8 páginasRugosidad Pintura Wei-2011-ICOM-CC-perceptie-ruwheid PDFjohnjoviedoAinda não há avaliações
- Annex 6 - 16.10.06-2 PDFDocumento33 páginasAnnex 6 - 16.10.06-2 PDFjohnjoviedoAinda não há avaliações
- B31.3 Process Piping Course - 17 High Pressure PipingDocumento12 páginasB31.3 Process Piping Course - 17 High Pressure PipingpfpmatosAinda não há avaliações
- Section Modulus Calculation of An Oil BargeDocumento15 páginasSection Modulus Calculation of An Oil BargeYan Naing Shin100% (2)
- Stateczny Pajor Mems 4 2017Documento9 páginasStateczny Pajor Mems 4 2017johnjoviedoAinda não há avaliações
- Mplab X Ide User's GuideDocumento330 páginasMplab X Ide User's GuideChristian Aros BobadillaAinda não há avaliações
- APQP WebinarDocumento69 páginasAPQP WebinarWahyu SupriyadiAinda não há avaliações
- FAA Heliport Design 150 5390 2cDocumento196 páginasFAA Heliport Design 150 5390 2ciscrdmyslfagin100% (2)
- General Tolerance (From ASME Y14.5M-2009) : Tolerances Can Be ExpressedDocumento12 páginasGeneral Tolerance (From ASME Y14.5M-2009) : Tolerances Can Be ExpressedE.j. SuAinda não há avaliações
- Annex 6 - 16.10.06-2 PDFDocumento33 páginasAnnex 6 - 16.10.06-2 PDFjohnjoviedoAinda não há avaliações
- Sensorless BLDC ControlDocumento36 páginasSensorless BLDC ControlPaolo TripicchioAinda não há avaliações
- DC Motor ControlDocumento36 páginasDC Motor ControlAnonymous 7t2BOJbAinda não há avaliações
- Product Sheet Damen Hydrograchic Survey Vessel 6613 YN 556053 TRAN DAI NGHIADocumento2 páginasProduct Sheet Damen Hydrograchic Survey Vessel 6613 YN 556053 TRAN DAI NGHIAjohnjoviedoAinda não há avaliações
- AN905 - Brushed DC Motor FundamentalsDocumento10 páginasAN905 - Brushed DC Motor FundamentalsLakmal PremaratneAinda não há avaliações
- Low-Cost Bidirectional Brushed DC Motor Control PDFDocumento16 páginasLow-Cost Bidirectional Brushed DC Motor Control PDFjohnjoviedoAinda não há avaliações
- 207 HydroCarbonBGasDocumento19 páginas207 HydroCarbonBGasEnder ZenginobuzAinda não há avaliações
- Home Built Hydraulic Ram PumpsDocumento84 páginasHome Built Hydraulic Ram PumpsZwq92yAinda não há avaliações
- Fluid FlowDocumento3 páginasFluid FlowrijintomAinda não há avaliações
- Physics Module 3B INTERFERENCEDocumento2 páginasPhysics Module 3B INTERFERENCEnatural mysticAinda não há avaliações
- Manual For LaboratoryDocumento87 páginasManual For LaboratoryBharathiraja MoorthyAinda não há avaliações
- June 2019 (IAL) QPDocumento28 páginasJune 2019 (IAL) QPivyAinda não há avaliações
- Electromagnetic Spectrum Research Activity C12-2-01Documento3 páginasElectromagnetic Spectrum Research Activity C12-2-01Mae CleofeAinda não há avaliações
- Centrifugal ForceDocumento2 páginasCentrifugal Forceroma-ibarreta-7565Ainda não há avaliações
- Light PPT 120108205852 Phpapp01Documento13 páginasLight PPT 120108205852 Phpapp01padmja4purohit100% (1)
- CENGR423-Lecture 1Documento38 páginasCENGR423-Lecture 1Jhoreene JulianAinda não há avaliações
- Assignment 2Documento1 páginaAssignment 2mc150201627 Adeela KiranAinda não há avaliações
- The Flow Noise Characteristics of A Control Valve - OK OK OK TEORIADocumento7 páginasThe Flow Noise Characteristics of A Control Valve - OK OK OK TEORIAJOSE MARTIN MORA RIVEROSAinda não há avaliações
- Physics ProjectDocumento26 páginasPhysics ProjectPratyusha Panda50% (2)
- Using Velocity Vs Time Graphs To Find DisplacementDocumento4 páginasUsing Velocity Vs Time Graphs To Find Displacementapi-262120176Ainda não há avaliações
- Physics 2 Module 12Documento10 páginasPhysics 2 Module 12Roldan OrmillaAinda não há avaliações
- Law of InertiaDocumento2 páginasLaw of InertiaAimee HernandezAinda não há avaliações
- CFD Transonic Store Separation Trajectory Predictions With Comparison To Wind Tunnel InvestigationsDocumento16 páginasCFD Transonic Store Separation Trajectory Predictions With Comparison To Wind Tunnel InvestigationsSpyros KyparissisAinda não há avaliações
- 1.0 Wind CalcsDocumento1 página1.0 Wind Calcsrao_vinay8296Ainda não há avaliações
- Gravity and Motion WorksheetDocumento2 páginasGravity and Motion WorksheetAlyaa EldafrawyAinda não há avaliações
- Q. Bank Pii/I, Ii T.Y.B.Sc. Sem VDocumento2 páginasQ. Bank Pii/I, Ii T.Y.B.Sc. Sem VNeelam KapoorAinda não há avaliações
- Sonic BoomDocumento2 páginasSonic BoomTommyVercettiAinda não há avaliações
- Kinematics of Rigid Bodies in Plane and 3-D MotionDocumento14 páginasKinematics of Rigid Bodies in Plane and 3-D MotionStratowarionAinda não há avaliações
- Cambridge International AS & A Level: PHYSICS 9702/23Documento16 páginasCambridge International AS & A Level: PHYSICS 9702/23Lujain HubessAinda não há avaliações
- Force and EnergyDocumento18 páginasForce and EnergyKymbelle Paul SardidoAinda não há avaliações
- Case StudyDocumento19 páginasCase StudyAnnie EblinAinda não há avaliações
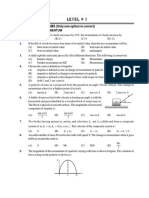
- Level # I: OBJECTIVE PROBLEMS (Only One Option Is Correct)Documento7 páginasLevel # I: OBJECTIVE PROBLEMS (Only One Option Is Correct)duckymomoAinda não há avaliações
- Physics ExamDocumento3 páginasPhysics Examdeomonhunter1Ainda não há avaliações
- Solucionario FrenchDocumento94 páginasSolucionario FrenchJOHN SEBASTIAN ZULUAGA OSORIOAinda não há avaliações
- Conservation of Mechanical EnergyDocumento7 páginasConservation of Mechanical EnergyNica DacumosAinda não há avaliações
- Drag Coefficient of A Cylinder SolidworksDocumento14 páginasDrag Coefficient of A Cylinder Solidworksm_b_sAinda não há avaliações