Você também pode gostar
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- CE132P - Det IndetDocumento5 páginasCE132P - Det IndetJanssen AlejoAinda não há avaliações
- Mitsubishi Electric Heat Pump Parts Outdoor MUZ-GE25-80VA (2) - A1, A2 - OBB532E PDFDocumento10 páginasMitsubishi Electric Heat Pump Parts Outdoor MUZ-GE25-80VA (2) - A1, A2 - OBB532E PDFTony SavageAinda não há avaliações
- DOST DTVS BS6 POWER CircuitDocumento1 páginaDOST DTVS BS6 POWER Circuitak ramAinda não há avaliações
- ANSI E1.50-1 2017 Entertainment Technology - Requirements For The Structural Support of Temporary LED, Video & Display SystemsDocumento19 páginasANSI E1.50-1 2017 Entertainment Technology - Requirements For The Structural Support of Temporary LED, Video & Display SystemsGabriel neagaAinda não há avaliações
- SRM-RMPM Registration Report For EvDocumento3 páginasSRM-RMPM Registration Report For EvAAKASH J (RA2111043020035)Ainda não há avaliações
- Office Reprographics and Mail ServicesDocumento36 páginasOffice Reprographics and Mail ServicesDevilZaaAinda não há avaliações
- Troubleshooting Polyacrylamide Gel Electrophoresis (PAGE)Documento9 páginasTroubleshooting Polyacrylamide Gel Electrophoresis (PAGE)sangeetsamratAinda não há avaliações
- SanskritiDocumento14 páginasSanskritiASEEM DUAAinda não há avaliações
- AHLSTAR™ Process Pumps: The Heart of Your ProcessDocumento16 páginasAHLSTAR™ Process Pumps: The Heart of Your ProcessRubenOrtegaAinda não há avaliações
- How To Install SecurePlatform - Gaia From A USB Device On Check Point Appliance and Open ServersDocumento3 páginasHow To Install SecurePlatform - Gaia From A USB Device On Check Point Appliance and Open ServersshikhaxohebkhanAinda não há avaliações
- A11Documento1 páginaA11MichiAinda não há avaliações
- SAP EDUCATION - C_THR12_66 SAMPLE QUESTIONSDocumento5 páginasSAP EDUCATION - C_THR12_66 SAMPLE QUESTIONSaijlalAinda não há avaliações
- Sample BoqDocumento144 páginasSample BoqDarren Dela CruzAinda não há avaliações
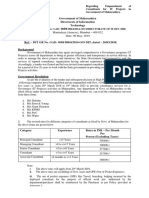
- Consultants New Rates GR Dated 09.05.2019Documento11 páginasConsultants New Rates GR Dated 09.05.2019Shakti SinghAinda não há avaliações
- AMCRPS - AKILA - InfoSheet - GBDocumento2 páginasAMCRPS - AKILA - InfoSheet - GBmigusagoAinda não há avaliações
- SAN11 Paper Guide 16-17Documento4 páginasSAN11 Paper Guide 16-17ghgheAinda não há avaliações
- Tech DataDocumento8 páginasTech DataVikramAinda não há avaliações
- The Poem of The Man God Vol 2 by Maria ValtortaDocumento8 páginasThe Poem of The Man God Vol 2 by Maria ValtortaOtieno SteveAinda não há avaliações
- 013 - Engine - Throttle - Pedal Position Sensor - Switch A Circuit MalfunctionDocumento4 páginas013 - Engine - Throttle - Pedal Position Sensor - Switch A Circuit MalfunctionMortada AlsonniAinda não há avaliações
- Asme-Bpvc Sec IV Int Vol 57Documento6 páginasAsme-Bpvc Sec IV Int Vol 57mostafa aliAinda não há avaliações
- The Aesthetics of Interactive Music Systems: Robert RoweDocumento5 páginasThe Aesthetics of Interactive Music Systems: Robert Rowesertimone0% (1)
- Success and Failure Factors of BPRDocumento29 páginasSuccess and Failure Factors of BPRMohammad Hamid MahmoodAinda não há avaliações
- Birmingham ProspectusDocumento62 páginasBirmingham ProspectusmentalpapyrusAinda não há avaliações
- Arkaprava Bhattacharya Civil Engineering Portfolio: Email IDDocumento9 páginasArkaprava Bhattacharya Civil Engineering Portfolio: Email IDArkaprava BhattacharyaAinda não há avaliações
- Zero Escape Virtues Last Reward PDFDocumento33 páginasZero Escape Virtues Last Reward PDFfcaicedo7239Ainda não há avaliações
- 1cjcds3j1 316290Documento155 páginas1cjcds3j1 316290taurusAinda não há avaliações
- Fortianalyzer Cli 40 mr3Documento312 páginasFortianalyzer Cli 40 mr3Alberto DantasAinda não há avaliações
- C11 Valves and InjDocumento7 páginasC11 Valves and Injraymon1191Ainda não há avaliações
- Fdas Technical Specs PDFDocumento10 páginasFdas Technical Specs PDFotadoyreychie31Ainda não há avaliações
- Custom Storage ClassesDocumento2 páginasCustom Storage ClassesSameer KumthekarAinda não há avaliações