Você também pode gostar
- Diagramas y Polifonías. Experiencias de PensamientoNo EverandDiagramas y Polifonías. Experiencias de PensamientoAinda não há avaliações
- Practica 6 Uso Del Osciloscopio y Circuitos RCDocumento2 páginasPractica 6 Uso Del Osciloscopio y Circuitos RCAlfonso García MartínezAinda não há avaliações
- Trabajo Dinamica PracticasDocumento10 páginasTrabajo Dinamica PracticasJuan Carlos Valdez LoaizaAinda não há avaliações
- Movimiento de partículas y cuerpos: ecuaciones, gráficos y solucionesDocumento10 páginasMovimiento de partículas y cuerpos: ecuaciones, gráficos y solucionesDiana ReveloAinda não há avaliações
- Mecanismos RotacionalesDocumento8 páginasMecanismos Rotacionaleszorick sanchezAinda não há avaliações
- Cálculos de energía y potencia en sistemas electromecánicosDocumento39 páginasCálculos de energía y potencia en sistemas electromecánicosMichelDominguezAinda não há avaliações
- Ejercicio 3 Centros InstantaneosDocumento1 páginaEjercicio 3 Centros InstantaneosMilton AcarapiAinda não há avaliações
- Circuito temporizador con AO para control de lámparaDocumento15 páginasCircuito temporizador con AO para control de lámparaAna Gómez AlfonsoAinda não há avaliações
- EngranesDocumento4 páginasEngranesMarco AdameAinda não há avaliações
- Análisis cinemático mecanismo biela-manivelaDocumento11 páginasAnálisis cinemático mecanismo biela-manivelaCarlos JaureguiAinda não há avaliações
- S2 - Mecanismos PDFDocumento29 páginasS2 - Mecanismos PDFchristianAinda não há avaliações
- Mecanismos articulados de 4 barrasDocumento16 páginasMecanismos articulados de 4 barrasMarisabel LiscanoAinda não há avaliações
- Lección 11 Mecanismos de Leva y SeguidorDocumento26 páginasLección 11 Mecanismos de Leva y SeguidorRoland LoachamínAinda não há avaliações
- Regulación tensiónDocumento10 páginasRegulación tensiónIsaac OrocioAinda não há avaliações
- Mecanismo de retorno rápidoDocumento1 páginaMecanismo de retorno rápidoAgustín JuárezAinda não há avaliações
- Velocidad RelativaDocumento7 páginasVelocidad RelativaIvan ZetinaAinda não há avaliações
- Cap1 Maquinas y Mecanismos Resumen ShigleyDocumento10 páginasCap1 Maquinas y Mecanismos Resumen ShigleyPascual MaldonadoAinda não há avaliações
- Ejemplo Siste Made Particu LasDocumento1 páginaEjemplo Siste Made Particu LasJosue Gabriel MartinezAinda não há avaliações
- Capítulo 17Documento33 páginasCapítulo 17cristianAinda não há avaliações
- Análisis estocástico de factores de fatigaDocumento17 páginasAnálisis estocástico de factores de fatigaLuis Alberto Navarro JimenezAinda não há avaliações
- Ejercicios Dinamica Vectorial, Con Respuesta.Documento10 páginasEjercicios Dinamica Vectorial, Con Respuesta.MauricioSandovalAinda não há avaliações
- Dinámica - 4.2Documento28 páginasDinámica - 4.2Jose AndresAinda não há avaliações
- Examenes Resueltos Del Curso2010 2011-1Documento76 páginasExamenes Resueltos Del Curso2010 2011-1Nihad Zizaoui BachirAinda não há avaliações
- Transformaciones de Esfuerzos y DeformacionesDocumento23 páginasTransformaciones de Esfuerzos y DeformacionesRosalyn AVAinda não há avaliações
- Vectores Problemas de FuerzasDocumento2 páginasVectores Problemas de FuerzasdcadcAinda não há avaliações
- Boletín 3. Derivadas de Funciones Vectoriales. Componentes Rectangulares de La Velocidad y La AceleraciónDocumento5 páginasBoletín 3. Derivadas de Funciones Vectoriales. Componentes Rectangulares de La Velocidad y La AceleraciónEdwin Angel Campos Sanchez100% (1)
- Diseño de levas para movimiento de seguidoresDocumento2 páginasDiseño de levas para movimiento de seguidoresCuauhtemoc Mazon ValadezAinda não há avaliações
- Tornillos de PotenciaDocumento34 páginasTornillos de PotenciaVilkin RangelAinda não há avaliações
- Instituto Tecnológico Nacional de México: Síntesis Analítica de MecanismosDocumento5 páginasInstituto Tecnológico Nacional de México: Síntesis Analítica de MecanismosOscar EscobedoAinda não há avaliações
- Problemas de Clase Tema Mezclas No Reactivas-ADocumento0 páginaProblemas de Clase Tema Mezclas No Reactivas-AMiguel Fernandez CaballeroAinda não há avaliações
- No.5 Relacion Line y Angu 1311BDocumento6 páginasNo.5 Relacion Line y Angu 1311BIrving Ponce HernandezAinda não há avaliações
- Vibraciones Tema1.1Documento10 páginasVibraciones Tema1.1Freddy VelázquezAinda não há avaliações
- Capítulo 5CINEMATICA MOVIMIENTO CIRCULAR PDFDocumento2 páginasCapítulo 5CINEMATICA MOVIMIENTO CIRCULAR PDFPedro Reynaldo Marin DominguezAinda não há avaliações
- Exam I 20202Documento2 páginasExam I 20202Jacobo NaderAinda não há avaliações
- LabNo4 Mec Retorno Rapido 15feb2014Documento8 páginasLabNo4 Mec Retorno Rapido 15feb2014JOELAinda não há avaliações
- Roz Amien ToDocumento7 páginasRoz Amien ToJuank AlmeidaAinda não há avaliações
- Aceleración punto móvil correderaDocumento1 páginaAceleración punto móvil correderaNorka Garcia100% (1)
- Centro de Masa, Area y GravedadDocumento10 páginasCentro de Masa, Area y GravedadAshley PerezAinda não há avaliações
- Ing C-RranoDocumento1 páginaIng C-RranoJosue BarretoAinda não há avaliações
- Problemas Propuestos Cinetica CuerpoDocumento16 páginasProblemas Propuestos Cinetica CuerpoKelvinSevillanoAinda não há avaliações
- BernoulliDocumento12 páginasBernoulliGoes AngelAinda não há avaliações
- Sesion 10 Carga FlexionanteDocumento11 páginasSesion 10 Carga FlexionanteVidal Alcca ZambranoAinda não há avaliações
- Centros Instantaneos de Velocidad PDFDocumento12 páginasCentros Instantaneos de Velocidad PDFmatiasAinda não há avaliações
- Funcion Armonica y Cicloidal LevasDocumento6 páginasFuncion Armonica y Cicloidal LevasHugo FaguaAinda não há avaliações
- HT 9.2 - Convección Forzada InternaDocumento1 páginaHT 9.2 - Convección Forzada InternaDiegoChonilloAinda não há avaliações
- Ejercicios Circui 2Documento10 páginasEjercicios Circui 2Joel Ramiro Escalante Ochoa100% (1)
- TAREA UV-01 Potencia en CADocumento1 páginaTAREA UV-01 Potencia en CADayana VelasquezAinda não há avaliações
- Ecuación de LazoDocumento11 páginasEcuación de LazoHuitzi Franco Rugerio100% (1)
- Máquinas Hidráulicas ExamenDocumento1 páginaMáquinas Hidráulicas ExamenrlopezangelesAinda não há avaliações
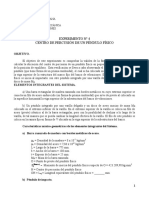
- (014a) Experimento Nº 4 (Centro de Percusión)Documento8 páginas(014a) Experimento Nº 4 (Centro de Percusión)Ricardo ElZelahAinda não há avaliações
- Análisis de Velocidad y Centros InstantáneosDocumento29 páginasAnálisis de Velocidad y Centros InstantáneosFabricio Andrés Segarra ReyesAinda não há avaliações
- MASAS-MUELLES-OSCILACIONESDocumento4 páginasMASAS-MUELLES-OSCILACIONESJosé Alejandro Vargas0% (1)
- Josue Sanchez Asignacion#1Documento9 páginasJosue Sanchez Asignacion#1Alex Sanchez1705Ainda não há avaliações
- 7.28 GuarinoDocumento1 página7.28 GuarinoGuarino Condori RicardoAinda não há avaliações
- Grados de libertad en articulaciones y mecanismosDocumento7 páginasGrados de libertad en articulaciones y mecanismosJorgeEliecerVillamilTorresAinda não há avaliações
- Libro de GuillenDocumento451 páginasLibro de GuillenRoberto GonzálezAinda não há avaliações
- Ejercicio - Freno de TamborDocumento4 páginasEjercicio - Freno de TamborCARLOS FERNANDO GOMEZAinda não há avaliações
- Mecanismos de línea recta e introducción a los de retorno rápidoDocumento10 páginasMecanismos de línea recta e introducción a los de retorno rápidoCarlos TamaraAinda não há avaliações
- Mecanismos de Retorno RapidoDocumento29 páginasMecanismos de Retorno RapidoIsabela Agamez SarmientoAinda não há avaliações
- Mecanismos de Retorno RapidoDocumento30 páginasMecanismos de Retorno RapidoLucy Varas Rojas100% (5)
- Tipos de Compresores y Sus CaracterísticaDocumento1 páginaTipos de Compresores y Sus CaracterísticaJohn PorterAinda não há avaliações
- Proyecto de Vida Viviana UgeñoDocumento15 páginasProyecto de Vida Viviana UgeñoJohn PorterAinda não há avaliações
- Utilizacion Del Multimetro en El AutomovilDocumento14 páginasUtilizacion Del Multimetro en El AutomovilJohn PorterAinda não há avaliações
- Sistemas Electricos Auxiliares y de ConduccionDocumento14 páginasSistemas Electricos Auxiliares y de ConduccionJohn PorterAinda não há avaliações
- Informe Adelanto IsuzuDocumento6 páginasInforme Adelanto IsuzuJohn PorterAinda não há avaliações
- Ejercicio de Circuito de Control Con ElectrovalvulasDocumento6 páginasEjercicio de Circuito de Control Con ElectrovalvulasJohn PorterAinda não há avaliações
- Materiales para El Ladron de JoulesDocumento1 páginaMateriales para El Ladron de JoulesJohn PorterAinda não há avaliações
- Sistemas de Inyección DiéselDocumento2 páginasSistemas de Inyección DiéselJohn PorterAinda não há avaliações
- Tipos de Compresores y Sus CaracterísticaDocumento1 páginaTipos de Compresores y Sus CaracterísticaJohn PorterAinda não há avaliações
- Calculo de Fuerza en El Cilindro para Diseño Del Resorte de TraccionDocumento3 páginasCalculo de Fuerza en El Cilindro para Diseño Del Resorte de TraccionJohn PorterAinda não há avaliações
- Materiales para El Ladron de JoulesDocumento1 páginaMateriales para El Ladron de JoulesJohn PorterAinda não há avaliações
- Alarma EspeDocumento98 páginasAlarma EspeJohn PorterAinda não há avaliações
- Ejercicio de Circuito de Control Con ElectrovalvulasDocumento6 páginasEjercicio de Circuito de Control Con ElectrovalvulasJohn PorterAinda não há avaliações
- Aire Comprimido Hidraulica 7bDocumento5 páginasAire Comprimido Hidraulica 7bJohn PorterAinda não há avaliações
- Recortes Diseño LunesDocumento3 páginasRecortes Diseño LunesJohn PorterAinda não há avaliações
- Simbologia NeumaticaDocumento7 páginasSimbologia NeumaticayouAinda não há avaliações
- Ventajas y desventajas de ser empresarioDocumento9 páginasVentajas y desventajas de ser empresariodmugeno1986Ainda não há avaliações
- Aire Comprimido Hidraulica 7bDocumento5 páginasAire Comprimido Hidraulica 7bJohn PorterAinda não há avaliações
- Determinacion de Las Longuitudes de Los Eslabones para Un Mecanismo para Tres Posiciones Del AcopladorDocumento4 páginasDeterminacion de Las Longuitudes de Los Eslabones para Un Mecanismo para Tres Posiciones Del AcopladorJohn PorterAinda não há avaliações
- Informe DieselDocumento9 páginasInforme DieselJohn PorterAinda não há avaliações
- Tipos de Compresores y Sus CaracterísticaDocumento1 páginaTipos de Compresores y Sus CaracterísticaJohn PorterAinda não há avaliações
- Mecanismos de línea recta y retorno rápidoDocumento8 páginasMecanismos de línea recta y retorno rápidoJohn Porter100% (1)
- Pares y Tipos de Mecanismos 2BDocumento8 páginasPares y Tipos de Mecanismos 2BJohn PorterAinda não há avaliações
- Practica 2 CorregidoDocumento22 páginasPractica 2 CorregidoJohn PorterAinda não há avaliações
- Deberes de Digitales Unidad 2Documento46 páginasDeberes de Digitales Unidad 2John PorterAinda não há avaliações
- PentahoDocumento6 páginasPentaholeonelli94Ainda não há avaliações
- Exel Connectadet - TDS - 2015-07-08 - Es - Spain - 1 PDFDocumento2 páginasExel Connectadet - TDS - 2015-07-08 - Es - Spain - 1 PDFJavier Hernandez MedinaAinda não há avaliações
- Verbos en Ingles Con EjemplosDocumento21 páginasVerbos en Ingles Con EjemplosWilliam Giovanni OrozcoAinda não há avaliações
- Proyecto de InvestigaciónDocumento11 páginasProyecto de InvestigaciónNOAH EMANUEL PLATIAU LÓPEZAinda não há avaliações
- Texto Único Ley 41 de 1998Documento29 páginasTexto Único Ley 41 de 1998SaharaAinda não há avaliações
- Regimen Laboral Publico PERUDocumento383 páginasRegimen Laboral Publico PERULiz Espinoza100% (3)
- Saneamiento Por Eviccion CompraventaDocumento11 páginasSaneamiento Por Eviccion CompraventaMARION ANDREA MARQUEZ SANTANAAinda não há avaliações
- Sistemas Eléctricos de Potencia: Ingeniería en ElectromecánicaDocumento7 páginasSistemas Eléctricos de Potencia: Ingeniería en ElectromecánicaAna MarreroAinda não há avaliações
- Reglamento Interno de Trabajo La MundialDocumento22 páginasReglamento Interno de Trabajo La MundialKARLA MARIA LANZA ZAVALAAinda não há avaliações
- Contenido Programatico Comercio ExteriorDocumento4 páginasContenido Programatico Comercio ExteriorfuriamaxiAinda não há avaliações
- Examenes (2) .OdtDocumento7 páginasExamenes (2) .OdtMILEIDY SUPELANOAinda não há avaliações
- 0812 Pavimentos Clase 01 IntroduccionDocumento38 páginas0812 Pavimentos Clase 01 IntroduccionHugoCentenoCerasAinda não há avaliações
- Projecto Blackstone DesclasificadoDocumento37 páginasProjecto Blackstone DesclasificadoPablo Matías ValdésAinda não há avaliações
- Crear USB Booteable de WINDOWS 7 (Mediante Ms-Dos) - Taringa!Documento5 páginasCrear USB Booteable de WINDOWS 7 (Mediante Ms-Dos) - Taringa!Fredy Humberto Peña RodríguezAinda não há avaliações
- Gaceta Aguinaldo 2021Documento36 páginasGaceta Aguinaldo 2021cesar castellanosAinda não há avaliações
- Estadísticos descriptivos de ingresos salariales de trabajadoresDocumento9 páginasEstadísticos descriptivos de ingresos salariales de trabajadoresCRISTIAN JOSMELL RAMIREZ TORRESAinda não há avaliações
- Criminalidad y GlobalizacionDocumento5 páginasCriminalidad y GlobalizacionBryan RamosAinda não há avaliações
- Silabus de Gestión Presupuestaria y FinancieraDocumento5 páginasSilabus de Gestión Presupuestaria y FinancieraJose Luis100% (1)
- Impact Mapping, User History, Flujograma, Diseño AppDocumento6 páginasImpact Mapping, User History, Flujograma, Diseño AppSantisteban Callacna FjAinda não há avaliações
- Modelo Acta Autorizacion Representante LegalDocumento3 páginasModelo Acta Autorizacion Representante LegalLuz Casallas Ruiz100% (7)
- Seguridad en La Operación de Maquinarias PesadasDocumento18 páginasSeguridad en La Operación de Maquinarias PesadasEdward Cayetano Arreaga100% (1)
- El Consumidor Es El ReyDocumento20 páginasEl Consumidor Es El ReyMaria Del Carmen Chavez LamasAinda não há avaliações
- Análisis cinemático mecanismosDocumento25 páginasAnálisis cinemático mecanismosJhon SánchezAinda não há avaliações
- Error y FraudeDocumento8 páginasError y FraudeYolita Cazorla HuamanAinda não há avaliações
- Gaviones y muros contenciónDocumento9 páginasGaviones y muros contenciónDoriagny RodriguezAinda não há avaliações
- Presentación Intercambiadores de CalorDocumento16 páginasPresentación Intercambiadores de CalorHector Naranjo100% (1)
- Bitacora Ricardo RomanDocumento12 páginasBitacora Ricardo RomanEl Tío Jugoso JuegaAinda não há avaliações
- LP Aba Forrajera 29-11-23Documento2 páginasLP Aba Forrajera 29-11-23Edith SanabriaAinda não há avaliações
- Recurso de casación contra sentencia que confirma reconocimiento de vínculo laboral de obrero municipalDocumento11 páginasRecurso de casación contra sentencia que confirma reconocimiento de vínculo laboral de obrero municipalLuisAinda não há avaliações
- SLI-F-074 Formato Lista de Chequeo para Aprobación de Procedimientos (Plan de Rescate) TOCANCIPADocumento1 páginaSLI-F-074 Formato Lista de Chequeo para Aprobación de Procedimientos (Plan de Rescate) TOCANCIPALEIDY JOHANNA CAMPO VARGASAinda não há avaliações