Escolar Documentos
Profissional Documentos
Cultura Documentos
Tese Fabio Lima
Enviado por
Ivan OliveiraDireitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Tese Fabio Lima
Enviado por
Ivan OliveiraDireitos autorais:
Formatos disponíveis
F abio Lima
Estimador Neuro-Fuzzy de Velocidade
Aplicado ao Controle Vetorial sem
Sensores de Motores de Induc ao Trif asicos
Tese apresentada ` a Escola Polit ecnica
da Universidade de S ao Paulo como
parte dos requisitos para a obtenc ao do
ttulo de Doutor em Engenharia
S ao Paulo
2010
F abio Lima
Estimador Neuro-Fuzzy de Velocidade
Aplicado ao Controle Vetorial sem
Sensores de Motores de Induc ao Trif asicos
Tese apresentada ` a Escola Polit ecnica
da Universidade de S ao Paulo como
parte dos requisitos para a obtenc ao do
ttulo de Doutor em Engenharia
Area de concentrac ao: Engenharia
El etrica - Energia e Automac ao.
Orientador: Prof. Dr. Walter Kaiser
S ao Paulo
2010
Dedicat oria
`
A Indhira, com amor
Por me ensinar a viver com intensidade e sim-
plicidade... Serei seu eterno aprendiz
Agradecimentos
A Deus, pela sa ude para a conclus ao de mais esta etapa.
`
A Indhira, pelo amor, carinho e paci encia ao longo da realizac ao deste trabalho. Sem voc e
este trabalho n ao aconteceria.
`
A minha famlia, meus irm aos Mara e Gilberto, minha cunhada Claudia, minhas sobrinhas
Andreza, Pamela, Malu e Ligia, ao meu pai Jayme e minha m ae Antonia (in memorian) pelo
apoio e incentivo. Ao meu sogro, Antonio Lima Oliveira, pela amizade, incentivo constate e
por me receber como um lho. Aos queridos amigos,Silvia e Paulo Toledo, Sirlene Caminada
e Soraia Cundare, Eduardo e Luciana Caminada, Gabriel e Gustavo Toledo, J ulia Caminada,
Tom e D alia, e aos compadres, Gabriel e Giovana, pela sincera amizade e torcida constante.
Ao prof. Dr. Walter Kaiser pela orientac ao e amizade. Pelas discuss oes nas horas boas e
difceis ao longo dessa trajet oria e pelos in umeros conselhos sobre como conduzir este trabalho
e minha carreira prossional. Pelo empenho na aquisic ao de sistemas e componentes para o
arranjo experimental.
Ao prof. Dr. Azauri Albano de Oliveira J unior, pela amizade que se iniciou com o trabalho
de mestrado. Pelas longas conversas e conselhos ao longo de uma d ecada. Pelas horas dedicadas
para que este trabalho fosse concludo. Pela gentileza em ceder o oscilosc opio utilizado no
procedimento experimental. Minha mais profunda admirac ao e respeito.
Ao prof. Dr. Ivan Nunes da Silva, pela pronta ajuda e discuss oes sobre os sistemas inteli-
gentes. Meu mais sincero agradecimento pela paci encia e atenc ao com que sempre me recebeu.
Pelas contribuic oes fornecidas no exame de qualicac ao para que este trabalho fosse concludo.
Ao prof. Dr. Manoel Luis de Aguiar, pela ajuda e discuss ao sobre o sistema de aciona-
mento.
Ao prof. Dr. Ricardo Paulino Marques pelas contribuic oes ao trabalho fornecidas no exame
de qualicac ao.
Ao prof. Dr. Wilson Komatsu, pelo convvio e pela pronta ajuda sempre que foi preciso.
Ao Marcelo Suetake, pela discuss ao a respeito da implementac ao.
Ao prof. Dr. Salvador Pinnilos Gimenez, pelo incentivo constante, e por me lembrar sempre
sobre a import ancia de concluir esta etapa.
Ao prof. MSc. Luis Caldas, pelo incentivo e pela ajuda com o modelo ANFIS.
Aos amigos professores Dr. Marco Antonio Fumagalli e MSc. Fabiano Camargo Rosa pelo
incentivo constante, e por n ao medirem esforcos para que esse trabalho fosse concludo. Ao
amigo prof. MSc. Antonio Jos e do Coutto Pitta, pela amizade e ajuda no ensaio da m aquina de
induc ao.
Ao prof. MSc. Jos e Roberto Marques, por gentilmente, ceder o inversor de frequ encia para
os ensaios.
Ao prof. Dr. Roberto Baginsk, pela inestim avel ajuda com o L
A
T
E
X.
Ao prof. Dr. Fuad Kassab Jr., pelas discuss oes e pela pronta ajuda oferecida na aquisic ao
de licencas demonstrativas das caixas de ferramenta do Matlab.
`
A amiga prof
a
. Dr
a
. Eliane de F atima Chinaglia, pela amizade e incentivo constante.
Aos t ecnicos do laborat orio da UMC, Alfeu, Aldemar, F abio, Rog erio e Washington pela
pronta ajuda durante a montagem do sistema experimental.
`
A UMC, por ceder espaco fsico para a montagem do arranjo experimental.
`
AUSP e ` a CPGda Escola Polit ecnica, pelo apoio nanceiro para a publicac ao e apresentac ao
desse trabalho.
Aos professores Dr. Renato Aparecido Aguiar, MSc.
Alvaro Camargo Prado e Dr. Fabrizio
Leonardi pelo incentivo e amizade.
Ao Centro Universit ario da FEI, pela liberac ao das atividades de doc encia para a apresentac ao
desse trabalho em confer encia.
Aos t ecnicos do Centro Universit ario da FEI, Moacir, Ari, Jorge e Alexandre pelo suporte
prestado ao longo do desenvolvimento experimental.
Aos funcion arios da Escola Polit ecnica da USP, pela atenc ao e prestatividade.
E a todos, que de alguma forma contriburam para a realizac ao deste trabalho.
"Um passo `a frente e voc^e n~ao esta
mais no mesmo lugar"
Chico Science & Nac~ ao Zumbi
Resumo
Este trabalho apresenta uma alternativa ao controle vetorial de motores de induc ao, sem a
utilizac ao de sensores para realimentac ao da velocidade mec anica do motor. Ao longo do
tempo, diversas t ecnicas de controle vetorial t em sido propostas na literatura. Dentre elas
est a a t ecnica de controle por orientac ao de campo (FOC), muito utilizada na ind ustria e pre-
sente tamb em neste trabalho. A principal desvantagem do FOC e a sua grande sensibilidade ` as
variac oes param etricas da m aquina, as quais podem invalidar o modelo e as ac oes de controle.
Nesse sentido, uma estimativa correta dos par ametros da m aquina, torna-se fundamental para o
acionamento. Este trabalho prop oe o desenvolvimento e implementac ao de um estimador ba-
seado em um sistema de infer encia neuro-fuzzy adaptativo (ANFIS) para o controle de veloci-
dade do motor de induc ao trif asico em um acionamento sem sensores. Pelo fato do acionamento
em malha fechada admitir diversas velocidades de regime estacion ario para o motor, uma nova
metodologia de treinamento por partic ao de frequ encia e proposta. Ainda, faz-se a validac ao
do sistema utilizando a orientac ao de campo magn etico no referencial de campo de entreferro
da m aquina. Simulac oes para avaliac ao do desempenho do estimador mediante o acionamento
vetorial do motor foram realizadas utilizando o programa Matlab/Simulink. Para a validac ao
pr atica do modelo, uma bancada de testes foi implementada; o acionamento do motor foi reali-
zado por um inversor de frequ encia do tipo fonte de tens ao (VSI) e o controle vetorial, incluindo
o estimador neuro-fuzzy, foi realizado pelo pacote de tempo real do programa Matlab/Simulink,
juntamente com uma placa de aquisic ao de dados da National Instruments.
Palavras-chave: Motor de induc ao, redes neurais articiais, l ogica fuzzy, acionamento sem
sensores, ANFIS.
Abstract
This work presents an alternative sensorless vector control of induction motors. Several tech-
niques for induction motor control have been proposed in the literature. Among these is the eld
oriented control (FOC), strongly used in industries and also in this work. The main drawback
of the FOC technique is its sensibility to deviations of the parameters of the machine, which
can deteriorate the control actions. Therefore, an accurate determination of the machines pa-
rameters is mandatory to the drive system. This work proposes the development of an adaptive
neuro-fuzzy inference system (ANFIS) estimator to control the angular speed of a three-phase
induction motor in a sensorless drive. In a closed loop conguration, several speed commands
can be imposed to the motor. Thus, a new frequency partition training of ANFIS is propo-
sed. Moreover, the ANFIS speed estimator is validated in a magnetizing ux oriented control
scheme. Simulations to evaluate the performance of the estimator considering the vector drive
system were done by the Matlab/Simulink. To determine the benets of the proposed model a
practical system was implemented using a voltage source inverter (VSI) and the vector control
including the ANFIS estimator, carried out by the Real Time Toolbox from Matlab/Simulink
and a data acquisition card from National Instruments.
Keywords: Induction motors, articial neural networks, fuzzy logic, sensorless drives,
ANFIS.
Lista de Figuras
1.1 Esquema tradicional de um acionamento escalar V/f . . . . . . . . . . . . . . . 28
1.2 Esquema de um acionamento sem sensores de velocidade . . . . . . . . . . . . 29
1.3 Esquema de um acionamento sem sensores baseado em MRA . . . . . . . . . 30
1.4 Diagrama para desenvolvimento do estimador em malha aberta . . . . . . . . . 33
3.1 Vetores de espaco da corrente de estator e de magnetizac ao (VAS, 1998) . . . . 47
3.2 Acionamento do inversor por banda de histerese (BOSE, 1997) . . . . . . . . . 52
3.3 FOC indireto de entreferro com correntes impostas no estator (VAS, 1998) . . . 52
4.1 Sistema fuzzy Sugeno com duas entradas e duas regras (JANG; SUN; MIZU-
TANI, 1997) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.2 Arquitetura ANFIS equivalente (JANG; SUN; MIZUTANI, 1997) . . . . . . . 56
5.1 Diagrama de blocos do acionamento experimental . . . . . . . . . . . . . . . . 62
5.2 Acoplamento do motor ao tacogerador . . . . . . . . . . . . . . . . . . . . . . 62
5.3 Vis ao geral do sistema de acionamento (destaque ` a etapa de pot encia) . . . . . 63
5.4 Vis ao geral do sistema de acionamento (destaque ` a etapa de controle) . . . . . 63
5.5 Placa dos sensores Hall de tens ao . . . . . . . . . . . . . . . . . . . . . . . . 64
5.6 Placa dos sensores Hall de corrente . . . . . . . . . . . . . . . . . . . . . . . . 64
5.7 Detalhe da placa NIDAQ6062E . . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.8 Placa de acoplamento optico . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
5.9 Inversor tipo fonte de tens ao . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
6.1 Diagrama para desenvolvimento do estimador em malha aberta . . . . . . . . . 68
6.2 Func oes de pertin encia para u
sQ
e i
sQ
com oito mil amostras . . . . . . . . . . 70
6.3 Velocidades calculada e estimada para oito mil amostras . . . . . . . . . . . . 70
6.4 Agrupamentos subtrativos de corrente e tens ao . . . . . . . . . . . . . . . . . 71
6.5 Func oes de pertin encia para u
sQ
e i
sQ
com oitocentas amostras . . . . . . . . . 71
6.6 Velocidades calculada e estimada para oitocentas amostras . . . . . . . . . . . 72
6.7 Func oes de pertin encia para i
sD
e i
sQ
com oito mil amostras . . . . . . . . . . . 73
6.8 Func oes de pertin encia para i
sD
e i
sQ
com oitocentas amostras . . . . . . . . . 73
6.9 Velocidades calculada e estimada para oito mil amostras . . . . . . . . . . . . 74
6.10 Velocidades calculada e estimada para oitocentas amostras . . . . . . . . . . . 74
6.11 Agrupamentos subtrativos utilizando somente as correntes do estator . . . . . . 75
6.12 Func oes de pertin encia para i
sD
e i
sQ
com particionamento de frequ encia . . . . 76
6.13 Conjunto de dados de treinamento . . . . . . . . . . . . . . . . . . . . . . . . 76
6.14 Teste do estimador para o conjunto de treinamento . . . . . . . . . . . . . . . 77
6.15 Teste do estimador para o conjunto de validac ao . . . . . . . . . . . . . . . . . 77
6.16 Agrupamentos subtrativos utilizando somente as correntes do estator com par-
ticionamento de frequ encia . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
6.17 Func oes de pertin encia iniciais para u
sD
, u
sQ
, i
sD
e i
sQ
com particionamento de
frequ encia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
6.18 Func oes de pertin encia p os treinamento para u
sD
, u
sQ
, i
sD
e i
sQ
com particiona-
mento de frequ encia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
6.19 Conjunto de dados de treinamento . . . . . . . . . . . . . . . . . . . . . . . . 80
6.20 Teste do estimador para o conjunto de treinamento . . . . . . . . . . . . . . . 80
6.21 Teste do estimador para o conjunto de validac ao . . . . . . . . . . . . . . . . . 81
6.22 Resposta para trinta e tr es hertz . . . . . . . . . . . . . . . . . . . . . . . . . . 81
6.23 Resposta para quarenta e sete hertz . . . . . . . . . . . . . . . . . . . . . . . . 82
6.24 Resposta para treze hertz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
6.25 Agrupamentos subtrativos utilizando somente as correntes do estator com par-
ticionamento de frequ encia . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
6.26 Func oes de pertin encia iniciais para u
sD
, u
sQ
, i
sD
e i
sQ
com particionamento de
frequ encia no acionamento vetorial . . . . . . . . . . . . . . . . . . . . . . . . 84
6.27 Func oes de pertin encia p os treinamento para u
sD
, u
sQ
, i
sD
e i
sQ
com particiona-
mento de frequ encia no acionamento vetorial . . . . . . . . . . . . . . . . . . 84
6.28 conjunto de dados de treinamento - IFOC . . . . . . . . . . . . . . . . . . . . 85
6.29 Conjunto de dados de validac ao - IFOC . . . . . . . . . . . . . . . . . . . . . 85
6.30 Conjunto de dados de treinamento (Reduzido) - IFOC . . . . . . . . . . . . . 86
6.31 Conjunto de dados de validac ao (Reduzido) - IFOC . . . . . . . . . . . . . . . 86
6.32 Agrupamentos subtrativos utilizando somente as correntes do estator com par-
ticionamento de frequ encia no acionamento vetorial . . . . . . . . . . . . . . . 87
6.33 Teste do estimador para o conjunto de validac ao . . . . . . . . . . . . . . . . . 88
6.34 Respostas a comandos especcos de velocidade - IFOC . . . . . . . . . . . . 89
6.35 Detalhes das correntes do acionamento IFOC . . . . . . . . . . . . . . . . . . 90
6.36 Corrente de magnetizac ao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
6.37 Curva de torque do acionamento IFOC . . . . . . . . . . . . . . . . . . . . . . 91
6.38 Teste do estimador para o conjunto de treinamento . . . . . . . . . . . . . . . 92
6.39 Teste do estimador para o conjunto de validac ao . . . . . . . . . . . . . . . . . 92
6.40 Func oes de pertin encia ap os o treinamento . . . . . . . . . . . . . . . . . . . . 93
6.41 Resposta ao comando de velocidade de 285 rad/s . . . . . . . . . . . . . . . . 93
6.42 Resposta ao comando de velocidade de 225 rad/s . . . . . . . . . . . . . . . . 94
6.43 Resposta ao comando de velocidade de 135 rad/s . . . . . . . . . . . . . . . . 94
6.44 Resposta ao comando de velocidade de 65 rad/s . . . . . . . . . . . . . . . . . 95
6.45 Respostas ` a variac oes de L
m
- Refer encia 285rad/s . . . . . . . . . . . . . . . . 98
6.46 Respostas ` a variac oes de L
m
(detalhe) - Refer encia 285rad/s . . . . . . . . . . . 98
6.47 Respostas ` a variac oes de L
m
- Refer encia 65rad/s . . . . . . . . . . . . . . . . 99
6.48 Respostas ` a variac oes de L
m
(detalhe) - Refer encia 65rad/s . . . . . . . . . . . 99
6.49 Respostas ` a variac oes de R
r
- Refer encia 285rad/s . . . . . . . . . . . . . . . . 100
6.50 Respostas ` a variac oes de R
r
(detalhe) - Refer encia 285rad/s . . . . . . . . . . . 100
6.51 Respostas ` a variac oes de R
r
- Refer encia 65rad/s . . . . . . . . . . . . . . . . 101
6.52 Respostas ` a variac oes de R
r
(detalhe) - Refer encia 65rad/s . . . . . . . . . . . 101
6.53 Respostas ` a variac oes de R
s
- Refer encia 285rad/s . . . . . . . . . . . . . . . . 102
6.54 Respostas ` a variac oes de R
s
(detalhe) - Refer encia 285rad/s . . . . . . . . . . . 102
6.55 Respostas ` a variac oes de R
s
- Refer encia 65rad/s . . . . . . . . . . . . . . . . . 103
6.56 Respostas ` a variac oes de R
s
(detalhe) - Refer encia 65rad/s . . . . . . . . . . . 103
6.57 Resposta ao comando de velocidade de 285 rad/s . . . . . . . . . . . . . . . . 104
6.58 Resposta ao comando de velocidade de 225 rad/s . . . . . . . . . . . . . . . . 104
6.59 Resposta ao comando de velocidade de 135 rad/s . . . . . . . . . . . . . . . . 105
6.60 Resposta ao comando de velocidade de 65 rad/s . . . . . . . . . . . . . . . . . 105
7.1 Func oes de Pertin encia ap os o treinamento . . . . . . . . . . . . . . . . . . . . 108
7.2 Conjunto de dados de treinamento . . . . . . . . . . . . . . . . . . . . . . . . 108
7.3 Conjunto de dados de validac ao . . . . . . . . . . . . . . . . . . . . . . . . . 109
7.4 Resposta experimental para sessenta Hertz . . . . . . . . . . . . . . . . . . . . 109
7.5 Resposta experimental para cinquenta e oito Hertz . . . . . . . . . . . . . . . . 110
7.6 Resposta experimental para quarenta e sete Hertz . . . . . . . . . . . . . . . . 110
7.7 Resposta experimental para trinta e tr es Hertz . . . . . . . . . . . . . . . . . . 111
7.8 Resposta experimental para onze Hertz . . . . . . . . . . . . . . . . . . . . . . 111
7.9 Resposta de simulac ao e experimental a um comando de 350 rad/s . . . . . . . 112
7.10 Correntes do eixo direto e quadratura . . . . . . . . . . . . . . . . . . . . . . . 112
7.11 Tens ao de linha do estator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
7.12 Resposta experimental para 300 rad/s . . . . . . . . . . . . . . . . . . . . . . 113
7.13 Resposta experimental para 100 rad/s . . . . . . . . . . . . . . . . . . . . . . 114
7.14 Resposta experimental para 50 rad/s . . . . . . . . . . . . . . . . . . . . . . . 114
7.15 Corrente de refer encia I
L
e resposta de corrente I
L
. . . . . . . . . . . . . . . . 115
7.16 Func oes de pertin encia ap os o treinamento . . . . . . . . . . . . . . . . . . . . 115
7.17 Conjunto de Treinamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
7.18 Conjunto de Validac ao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
7.19 Resposta do estimador para 20 rad/s . . . . . . . . . . . . . . . . . . . . . . . 117
7.20 Resposta do estimador para 300 rad/s . . . . . . . . . . . . . . . . . . . . . . 117
7.21 Resposta do estimador para 50 rad/s . . . . . . . . . . . . . . . . . . . . . . . 118
7.22 Resposta do estimador para 150 rad/s . . . . . . . . . . . . . . . . . . . . . . 118
7.23 Resposta de generalizac ao do estimador para 35 rad/s . . . . . . . . . . . . . . 119
7.24 Resposta de generalizac ao do estimador para 65 rad/s . . . . . . . . . . . . . . 119
7.25 Resposta de generalizac ao do estimador para 135 rad/s . . . . . . . . . . . . . 120
7.26 Resposta de generalizac ao do estimador para 225rad/s . . . . . . . . . . . . . . 120
7.27 Resposta de generalizac ao do estimador para 285rad/s . . . . . . . . . . . . . . 121
7.28 Func oes de pertin encia ap os o treinamento . . . . . . . . . . . . . . . . . . . . 121
7.29 Conjunto de Treinamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
7.30 Conjunto de Validac ao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
7.31 Resposta de generalizac ao do estimador para 35rad/s . . . . . . . . . . . . . . 123
7.32 Resposta de generalizac ao do estimador para 65rad/s . . . . . . . . . . . . . . 123
7.33 Resposta de generalizac ao do estimador para 135rad/s . . . . . . . . . . . . . . 124
7.34 Resposta de generalizac ao do estimador para 225rad/s . . . . . . . . . . . . . . 124
7.35 Resposta de generalizac ao do estimador para 285rad/s . . . . . . . . . . . . . . 125
A.1 MIT sim etrico com rotor liso . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
A.2 Sistema referencial gen erico . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
B.1 Modelo do acionamento vetorial no simulink . . . . . . . . . . . . . . . . . . 142
D.1 Diagrama de blocos do controle PI da malha de velocidade . . . . . . . . . . . 144
D.2 Lugar geom etrico das razes com controle PI . . . . . . . . . . . . . . . . . . . 145
D.3 Respostas de velocidade com controle PI . . . . . . . . . . . . . . . . . . . . . 145
Lista de Tabelas
5.1 Caractersticas da placa NIDAQ6062E . . . . . . . . . . . . . . . . . . . . . . 65
6.1 Soma dos erros quadr aticos m edios de treinamento . . . . . . . . . . . . . . . 96
6.2 Erros m edios relativos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
C.1 Par ametros do motor (Simulac ao) . . . . . . . . . . . . . . . . . . . . . . . . 143
C.2 Par ametros do motor (Experimental) . . . . . . . . . . . . . . . . . . . . . . . 143
Lista de abreviaturas e siglas
CC Corrente Contnua
CA Corrente Alternada
MIT Motor de Induc ao Trif asico
FOC eld oriented control
DTC Direct Torque Control
FAM Fiel Acceleration Method
IC Intelig encia Computacional
ANFIS Adaptive Neuro-Fuzzy Inference Systems
EKF Extended Kalman Filter
RNA Redes Neurais Articiais
PI Proporcional-Integral
LQR Linear Quadratic Regulator
RBNF Real Base Function Network
MRC Motores a Relut ancia Chaveados
CNC Comando Num erico Computadorizado
MRA Modelo de Refer encia Adaptativo
DSP Processador Digital de Sinais
TSK Takagi-Sugeno-Kang
VSI Inversor Fonte de Tens ao
IGBT Transistor Bipolar de Porta Isolada
SEQM Soma dos Erros Quadr aticos Medios
EMR Erro M edio Relativo
pu Por Unidade
pu Por Unidade
pu Por Unidade
E/S Entrada e Sada
Lista de smbolos
rre f
Velocidade angular de refer encia de rotor
u
sDre f
Refer encia da componente direta da tens ao de estator no referencial
estacion ario
u
sQre f
Refer encia da componente em quadratura da tens ao de estator no
referencial estacion ario
1
Velocidade angular sncrona de estator
angulo de transformac ao do referencial sncrono de estator para o
referencial estacion ario no acionamento escalar
r
Velocidade angular estimada de rotor
V
s
Tens oes de Estator
I
s
Correntes de Estator
r
Fluxo magn etico de rotor
r
Fluxo magn etico estimado de rotor
u
sg
Vetor espacial da tens ao de estator no referencial gen erico
i
sg
Vetor espacial da corrente de estator no referencial gen erico
sg
Vetor espacial do uxo magn etico de estator no referencial
gen erico
g
Velocidade angular do referencial gen erico
R
s
Resist encia do estator
p Operador derivativo em relac ao ao tempo
j N umero imagin ario
1
u
rg
Vetor espacial da tens ao de rotor no referencial gen erico
i
rg
Vetor espacial da corrente de rotor no referencial gen erico
rg
Vetor espacial do uxo magn etico de rotor no referencial gen erico
R
r
Resist encia de rotor
r
Velocidade angular de rotor
L
s
Indut ancia propria do estator
L
m
Indut ancia de magnetizac ao
L
r
Indut ancia propria do rotor
mg
Vetor espacial do uxo magn etico de entreferro no referencial
gen erico
i
mg
Vetor espacial da corrente de entreferro no referencial gen erico
T
e
Torque eletromagn etico
P N umeros de pares de p olos magn eticos
. Produto vetorial
J Momento de in ercia
B Coeciente de atrito viscoso
T
l
Conjugado de carga
Eixo direto do referencial mec anico de rotor
Eixo quadratura do referencial mec anico de rotor
x Eixo direto do referencial de uxo magn etico de entreferro
y Eixo quadratura do referencial de uxo magn etico de entreferro
D Eixo direto do referencial estacion ario
Q Eixo quadratura do referencial estacion ario
sx
Componente do eixo direto do uxo magn etico de estator no refe-
rencial de uxo magn etico de entreferro
mm
Velocidade angular do referencial de entreferro
i
sx
Componente do eixo direto da corrente de estator no referencial de
uxo magn etico de entreferro
i
rx
Componente do eixo direto da corrente de rotor no referencial de
uxo magn etico de entreferro
sy
Componente do eixo quadratura do uxo magn etico de estator no
referencial de uxo magn etico de entreferro
i
sy
Componente do eixo quadratura da corrente de estator no referen-
cial de uxo magn etico de entreferro
i
ry
Componente do eixo quadratura da corrente de rotor no referencial
de uxo magn etico de entreferro
rx
Componente do eixo direto do uxo magn etico de rotor no refe-
rencial de uxo magn etico de entreferro
i
rx
Componente do eixo direto da corrente de rotor no referencial de
uxo magn etico de entreferro
ry
Componente do eixo quadratura do uxo magn etico de rotor no
referencial de uxo magn etico de entreferro
u
sx
Componente do eixo direto da tens ao de estator no referencial de
uxo magn etico de entreferro
u
sy
Componente do eixo quadratura da tens ao de estator no referencial
de uxo magn etico de entreferro
i
mm
Corrente de magnetizac ao no referencial de uxo magn etico de en-
treferro
L
sl
Indut ancia de dispers ao do estator
T
sl
Constante de tempo de dispers ao do estator
T
r
Constante de tempo do rotor
T
rl
Constante de tempo de dispers ao do rotor
sl
Velocidade angular de escorregamento no referencial de uxo
magn etico de entreferro
m
Angulo do vetor de espaco da corrente de magnetizac ao e o eixo
direto estacion ario D
sl
Angulo do vetor de espaco da corrente de magnetizac ao e o eixo
direto de rotor r
r
Angulo do eixo direto de rotor r e o eixo direto estacion ario D
i
mmre f
Refer encia de corrente de magnetizac ao no referencial de uxo
magn etico de entreferro
K Instante atual de amostragem
A N umero de padr oes de treinamento
n padr ao de treinamento
k N umero de amostras para o c alculo de EMR
I
L
Refer encia de corrente de linha gerada pelo acionamento vetorial
I
L
Corrente de linha do motor
Sum ario
1 Introduc ao 26
1.1 Considerac oes iniciais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
1.2 Objetivos, motivac ao e contribuic oes do trabalho . . . . . . . . . . . . . . . . 30
1.3 Divis ao deste trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
1.4 Publicac oes relativas ao trabalho . . . . . . . . . . . . . . . . . . . . . . . . . 34
1.4.1 Congressos Cientcos . . . . . . . . . . . . . . . . . . . . . . . . . . 34
1.4.2 Peri odicos Cientcos . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2 Revis ao da Literatura 35
2.1 T ecnicas de controle do MIT . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.1.1 Controle direto de torque . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.1.2 Controle por orientac ao de campo . . . . . . . . . . . . . . . . . . . . 36
2.2 Acionamento sem sensores . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.3 Filtro estendido de Kalman . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.4 Sistemas fuzzy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2.5 Redes neurais articiais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.6 Sistemas neuro-fuzzy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
2.7 Conclus oes sobre a revis ao da literatura . . . . . . . . . . . . . . . . . . . . . 45
3 Modelo Matem atico do MIT com Orientac ao de Campo - Refer encia no uxo
magn etico de entreferro 46
3.1 Modelo Vetorial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.2 Modelo com orientac ao no uxo magn etico de entreferro . . . . . . . . . . . . 47
3.2.1 Equac oes de estator . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.2.2 Equac oes de rotor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.2.3 Acionamento com correntes impostas no estator . . . . . . . . . . . . . 51
3.2.4 Sistema de desacoplamento . . . . . . . . . . . . . . . . . . . . . . . 53
4 ANFIS: Sistema de infer encia Neuro-Fuzzy adaptativo 55
4.1 Introduc ao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.1.1 O sistema de infer encia fuzzy de Sugeno . . . . . . . . . . . . . . . . . 55
4.1.2 Arquitetura ANFIS . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.2 Algoritmo hbrido de aprendizagem . . . . . . . . . . . . . . . . . . . . . . . 57
4.3 Algoritmos para agrupamento . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.3.1 Agrupamento Subtrativo . . . . . . . . . . . . . . . . . . . . . . . . . 58
5 Arranjo Experimental 61
5.1 Descric ao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.1.1 Sensores de efeito Hall . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.1.2 Placa de aquisic ao de dados . . . . . . . . . . . . . . . . . . . . . . . 65
5.1.3 Acoplamento optico . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
5.1.4 Inversor fonte de tens ao . . . . . . . . . . . . . . . . . . . . . . . . . 66
6 Desenvolvimento de um estimador neuro-fuzzy de velocidade 67
6.1 Estrat egia para o desenvolvimento do estimador . . . . . . . . . . . . . . . . . 67
6.2 Considerac oes iniciais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
6.3 Treinamento utilizando i
sQ
e u
sQ
. . . . . . . . . . . . . . . . . . . . . . . . . 69
6.3.1 Treinamento com frequ encia constante . . . . . . . . . . . . . . . . . 69
6.4 Treinamento utilizando i
sD
e i
sQ
. . . . . . . . . . . . . . . . . . . . . . . . . 72
6.4.1 Treinamento com frequ encia constante . . . . . . . . . . . . . . . . . 72
6.4.2 Treinamento com frequ encia vari avel . . . . . . . . . . . . . . . . . . 75
6.5 Treinamento utilizando i
sD
, i
sQ
, u
sD
, u
sQ
. . . . . . . . . . . . . . . . . . . . . 78
6.5.1 Treinamento com frequ encia vari avel . . . . . . . . . . . . . . . . . . 78
6.6 Treinamento utilizando i
sD
, i
sQ
, u
sD
, u
sQ
no modelo vetorial . . . . . . . . . . . 83
6.6.1 Treinamento com frequ encia vari avel . . . . . . . . . . . . . . . . . . 83
6.7 Treinamento no modelo vetorial utilizando sistema ANFIS recorrente . . . . . 88
6.7.1 Treinamento com frequ encia constante . . . . . . . . . . . . . . . . . 89
6.7.2 Treinamento com frequ encia vari avel . . . . . . . . . . . . . . . . . . 91
6.8 Erros associados ao estimador ANFIS . . . . . . . . . . . . . . . . . . . . . . 95
6.9 Avaliac ao do impacto da variac ao de par ametros . . . . . . . . . . . . . . . . . 97
6.9.1 Variac ao da indut ancia de magnetizac ao . . . . . . . . . . . . . . . . . 97
6.9.2 Variac ao da resist encia de rotor . . . . . . . . . . . . . . . . . . . . . 99
6.9.3 Variac ao da resist encia de estator . . . . . . . . . . . . . . . . . . . . 101
6.10 Acionamento sem sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
6.11 An alise dos resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
7 Resultados experimentais 107
7.1 Acionamento Escalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
7.2 Acionamento Vetorial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
7.3 An alise dos resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
8 Conclus oes 127
8.1 Trabalho futuro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
Refer encias 130
Ap endice A -- Modelo Vetorial do MIT em Referencial Gen erico 138
Ap endice B -- Acionamento Vetorial no Simulink 142
Ap endice C -- Par ametros do MIT 143
Ap endice D -- Sintonia do controlador da malha de velocidade 144
26
CAP
ITULO 1
Introduc ao
1.1 Considerac oes iniciais
Os acionamentos el etricos industriais v em sofrendo dr asticas mudancas ao longo dos anos
na constante busca por desempenho e qualidade de energia. Nesse cen ario, durante muito
tempo, os acionamentos de corrente contnua (CC) eram predominantes devido principalmente
ao modelo simplicado, linear ` a consequente facilidade de projeto do sistema de controle. Por
outro lado, esse tipo de acionamento possui desvantagens crticas relacionadas a aplicac oes in-
dustriais, como taxa de manutenc ao elevada e centelhamento, relacionado ` a comutac ao mec anica.
Em uma outra vertente encontram-se os acionamentos em corrente alternada (CA). Nesse
tipo de acionamento o motor de induc ao trif asico (MIT) e predominantemente utilizado. Co-
labora para esse favoritismo a elevada robustez operacional da m aquina, manutenc ao pratica-
mente nula e custo competitivo (FINCH; GIAOURIS, 2008). A principal desvantagem do MIT
est a relacionada ao seu modelo din amico, mais complexo quando comparado ao motor CC.
Os motores de m a permanente v em ganhando destaque no cen ario recente dos acionamen-
tos el etricos, devido ` a reduc ao no custo de fabricac ao. Em (MELFI; EVON; MCELVEEN,
2009) h a um comparativo entre as caractersticas de acionamento do MIT e motores de m a
permanente. Os autores n ao prop oem, ainda, que haver a a substituic ao completa dos aciona-
mentos com o MIT, mas sugerem que aplicac oes que utilizem inversores de frequ encia sejam
27
as primeiras a serem substitudas pelos motores a m a permanente. Em particular, os autores se
referem ` a ind ustria de papel e celulose, a qual pertencem.
Embora tradicionalmente os acionamentos CC fossem utilizados em aplicac oes de veloci-
dade vari avel, e os acionamentos CA em aplicac oes de velocidade constante, a evoluc ao dos
dispositivos semicondutores, associada a t ecnicas de controle e estimac ao, gradualmente au-
mentaram o desempenho dos acionamentos CA, condenando os acionamentos CC ` a obsol encia
(BOSE, 2009).
Diversos estudos v em sendo realizados h a d ecadas para que o motor de induc ao opere em
aplicac oes de alto desempenho. Esses estudos podem ser divididos em:
Alterac oes das caractersticas construtivas da m aquina;
Busca de modelos matem aticos diferenciados de representac ao da m aquina;
Busca de novas estruturas e algoritmos de controle para o acionamento.
Dentre as possibilidades anteriormente apresentadas, in umeros trabalhos est ao concentra-
dos na ultima opc ao, ou seja, no estudo e implementac ao de novas topologias e algoritmos de
controle, para que se atinja o alto desempenho desejado aos acionamentos em CA.
A denic ao do modelo matem atico representativo do motor est a diretamente ligada ` a es-
colha desses algoritmos. Basicamente, pode-se dividir o acionamento do MIT em tr es grandes
grupos: o acionamento escalar, o acionamento vetorial e o controle direto de torque.
Segundo (BOLDEA, 2008) alguns dos assuntos com maior representatividade potencial
para o futuro dos acionamentos emCAcontemplamo acionamento escalar de motores trif asicos,
o m etodo de controle por orientac ao de campo (FOC - eld oriented control) e o controle di-
reto de torque (DTC - direct torque control), controle de acionamentos em CA sem sensores,
controle de geradores CA de velocidade vari avel e acionamentos com motores lineares.
Dos m etodos de acionamento citados acima, o controle escalar se destaca pela facilidade
de implementac ao. A proposta desta estrat egia consiste em manter o uxo magn etico de en-
treferro constante na m aquina. O uxo magn etico pode, teoricamente, permanecer constante
mantendo-se a raz ao entre a tens ao e a frequ encia de acionamento (V/ f =constante). Como s o
h a informac ao sobre o m odulo do uxo magn etico, o desempenho din amico desta estrat egia e
pobre. Ainda, a baixas frequ encias de acionamento a queda de tens ao na imped ancia de estator
se torna signicativa, alterando o uxo magn etico de entreferro e deteriorando a resposta de
velocidade. A gura 1.1 apresenta o diagrama de blocos de um acionamento escalar.
28
Figura 1.1: Esquema tradicional de um acionamento escalar V/f
Para o acionamento de alto desempenho em CA, comumente se utiliza o acionamento DTC
ou FOC. O DTC se caracteriza pela atuac ao direta sobre o torque da m aquina. Para tal tarefa, o
desenvolvimento de estimadores de uxo magn etico e de torque se faz necess ario (VAS, 1998).
No controle FOC, adota-se o recurso de transformac ao de coordenadas (Transformada de
Park e Clarke), na intenc ao de simplicar o modelo matem atico do MIT, tornando-o o mais
semelhante possvel ao modelo do motor CC com excitac ao de campo independente. A partir
da transformada de Clarke, a representac ao inicial do MIT a tr es coordenadas e simplicada
por meio da decomposic ao a duas coordenadas. Ap os esta decomposic ao a duas coordenadas,
escolhe-se o referencial de orientac ao das mesmas (Park), o qual pode coincidir com a veloci-
dade do campo magn etico girante do estator, do rotor ou de entreferro.
O controle FOC pode, ainda, ser classicado como direto ou indireto. No controle direto
o uxo magn etico e diretamente medido por meio de sensores, ou estimado mediante o conhe-
cimento das tens oes e correntes de estator. No controle FOC indireto, a posic ao do vetor de
campo e determinada por meio de uma relac ao de frequ encia de escorregamento, juntamente
como conhecimento da posic ao instant anea do rotor da m aquina (LORENZ; LIPO; NOVOTNY,
1994).
O conhecimento da posic ao de rotor no controle FOC indireto e, portanto, de fundamental
import ancia para a realizac ao do mesmo. A determinac ao da posic ao de rotor e, comumente,
realizada atrav es da integrac ao num erica da velocidade de rotor. Todavia, a inserc ao de sensores
de velocidade, como codicadores opticos ou tacogeradores, diminui a precis ao e a conabi-
lidade do sistema de controle, al em de aumentar o custo total do sistema (LORENZ; LIPO;
NOVOTNY, 1994). Ainda, para motores j a instalados no ambiente industrial, em muitos casos
a instalac ao de sensores se torna sicamente impossvel.
Segundo (FINCH; GIAOURIS, 2008), uma caracterstica particular dos acionamentos em
CA industriais se deve ao fato dos acionamentos com controle de posic ao ou velocidade sem
sensores (sensorless) teremaumentado signicativamente nos ultimos anos. Essa e uma tend encia
crescente nos acionamentos industriais.
29
Para contornar os problemas associados ` a utilizac ao de sensores descritos anteriormente,
diversos acionamentos sem a utilizac ao de sensores de velocidade ou posic ao t em sido pro-
postos na literatura e utilizados industrialmente (HOLTZ, 1998), (HOLTZ, 2005), (LASCU;
BOLDEA; BLAABJERG, 2005b) e (LASCU; BOLDEA; BLAABJERG, 2005a). Como a ve-
locidade do rotor n ao e uma vari avel diretamente mensurada nos acionamentos sem sensores,
ela precisa ser estimada matematicamente atrav es de vari aveis como as correntes e tens oes do
estator da m aquina.
A gura 1.2 apresenta um diagrama de blocos tpico de um acionamento sem sensores de
velocidade.
Figura 1.2: Esquema de um acionamento sem sensores de velocidade
Os acionamentos semsensores convencionais utilizampar ametros da m aquina na estimac ao
da velocidade (VAS, 1998), (VAS, 1993) . Essa situac ao se caracteriza como um problema, j a
que variac oes param etricas s ao comuns nas m aquinas assncronas de induc ao. No sentido de
aumentar o desempenho dos acionamentos sem sensores, sistemas adaptativos baseados em
modelo de refer encia (MRA) s ao comuns na literatura (ORLOWSKA-KOWALSKA; DYB-
KOWSKI, 2010), (CIRRINCIONE; PUCCI, 2005). A gura 1.3 apresenta um diagrama de
blocos de um MRA convencional.
Neste m etodo, o uxo magn etico de rotor e determinado a partir do equacionamento de
estator em referencial estacion ario. O equacionamento de estator em referencial estacion ario e
independente da velocidade de rotor, sendo ent ao denominado modelo de refer encia. O mesmo
uxo magn etico de rotor pode ser determinado a partir do equacionamento de rotor no mesmo
referencial estacion ario. Este ultimo equacionamento e dependente da velocidade de rotor,
sendo ent ao denominado como modelo adaptativo. Como o equacionamento de estator n ao de-
pende da velocidade de rotor, diferencas entre os dois uxos (erro) implicam em adaptac oes
na velocidade de rotor estimada. O mecanismo de adaptac ao nos sistemas baseados em MRA
cl assicos, cont em um controlador PI (Proporcional-Integral) para o ajuste da velocidade esti-
mada.
30
Na busca por estruturas de estimac ao mais robustas em relac ao ` as varic oes param etricas da
m aquina encontra-se ainda o ltro de Kalman e o observador de Luenberger. Para a aplicac ao
em sistemas n ao lineares, como e o caso dos acionamentos do MIT, a forma estendida deve ser
utilizada. Por em, a inicializac ao do ltro, sua alta carga computacional e possveis problemas
de resposta de regime estacion ario s ao as principais desvantagens (VAS, 1998) e (STRONACH;
VAS, 1998). Em (ZHANG et al., 2009) se apresenta um estudo comparativo entre esses obser-
vadores na estimativa da velocidade de rotor do MIT.
Figura 1.3: Esquema de um acionamento sem sensores baseado em MRA
Os sistemas baseados em intelig encia computacional (IC) v em ganhando destaque no acio-
namento semsensores do MIT h a mais de uma d ecada (VAS, 1999), (STRONACH; VAS, 1998),
(BOSE, 1997). Dentre as diversas t ecnicas disponveis para controle e estimac ao aplicadas aos
acionamentos em CA destacam-se as Redes Neurais Articiais (RNA), os sistemas fuzzy, e
os sistemas hbridos baseados nas duas metodologias. Particularmente, as RNA t em recebido
grande atenc ao no meio acad emico (GOEDTEL, 2007) (ROSA, 2005) e aparentam, comparati-
vamente, terem tido maior impacto sobre a eletr onica de pot encia e o acionamento de motores
(BOSE, 2007).
1.2 Objetivos, motivac ao e contribuic oes do trabalho
Da secc ao anterior, pode-se observar a grande import ancia dos acionamentos sem sensores
nos acionamentos el etricos industriais. Observa-se ainda, que essa import ancia tem se tornado
crescente com o passar dos anos. Adicionalmente, no controle vetorial indireto, a posic ao
31
angular do vetor de campo e obtida atrav es de uma relac ao de escorregamento da m aquina
e do conhecimento da posic ao angular de rotor. Desta forma, a estimativa de velocidade e
fundamental para o sucesso do acionamento, j a que a posic ao de rotor e inferida atrav es da
integrac ao num erica da velocidade.
Tratando especicamente dos sistemas de IC, os sistemas baseados em RNAs possuem a
desvantagem da difcil interpretac ao fsica relacionada aos pesos sin apticos ajustados atrav es
do treinamento. Ainda, o n umero de camadas e neur onios da RNA s ao normalmente ajustados
por tentativa e erro (BA-RAZZOUK et al., 1997). Em (VAS, 1999), algumas congurac oes de
RNAs para aplicac ao em m aquinas el etricas s ao apresentadas.
Em outra vertente, os sistemas fuzzy conferem uma melhor interpretac ao fsica do sistema
atrav es da denic ao de valores lingusticos, regras e func oes de pertin encia ajustadas a cada uma
das vari aveis de entrada e de sada. Por em, requerem conhecimento especialista neste ajuste.
Esta tarefa pode ser exaustiva ou mesmo invi avel em sistemas multi-vari aveis e n ao lineares,
como s ao caracterizadas as m aquinas de induc ao.
Considerando a import ancia dos acionamentos sem sensores do MIT e a import ancia que os
sistemas baseados em IC v em ganhando com o tempo, o presente trabalho tem como objetivo
fornecer uma contribuic ao ao acionamento de motores de induc ao trif asicos, em aplicac oes
de alto desempenho, por meio da combinac ao de l ogica fuzzy e redes neurais articiais na
estimac ao da velocidade angular de rotor da m aquina. Particularmente, o sistema de infer encia
neuro-fuzzy adaptativo (ANFIS - adaptive neuro-fuzzy inference system) ser a utilizado como
estimador de velocidade.
Tal estrat egia estar a associada ao modelo do MIT com controle por orientac ao de campo
indireto, com referencial no uxo magn etico de entreferro da m aquina, sem a utilizac ao de
sensores tais como codicadores ou tac ometros para realimentac ao de velocidade.
O ANFIS e mais robusto quando comparado com sistemas puramente neurais. Ainda, pode-
se treinar o sistema com dados experimentais corrompidos por rudo de medida, como ser a
apresentado mais adiante. O ANFIS e equivalente ao sistema fuzzy de Sugeno, com carga com-
putacional reduzida e possibilidade do ajuste das func oes de pertin encia a partir de algoritmos
de treinamento, quando comparado ao modelo de Mandani.
Sabe-se da literatura (VAS, 1998), que o controle com orientac ao de campo indireto, com
referencial no uxo magn etico de entreferro da m aquina, possui um equacionamento e controle
mais complexos que os outros dois possveis referenciais (de estator e de rotor). A sensibilidade
desta estrat egia ` a variac ao de par ametros da m aquina tamb em e maior. Dessa maneira, o con-
32
trole do MIT utilizando referencial no campo de entreferro acaba n ao sendo uma estrat egia de
controle atrativa para a maioria dos projetistas. Todavia, este referencial ser a utilizado neste
trabalho, por inserir condic oes mais severas ao estimador em relac ao ` a variac ao de par ametros,
j a citada, e n ao linearidades do sistema.
A avaliac ao de desempenho do estimador neuro-fuzzy de velocidade em um referencial n ao
consagrado para a orientac ao de campo, na estrat egia de controle vetorial do MIT, caracteriza-se
como mais uma contribuic ao deste trabalho.
O trabalho de (GOEDTEL, 2007) apresentou um estimador de velocidade para o MIT
baseado em redes neurais articiais. Naquele trabalho, a RNA foi treinada com dados de
simulac ao computacional. O autor obteve respostas transit orias insatisfat orias, com erro e-
levado. Ent ao, ap os o treinamento da RNA com dados de simulac ao, foi inserida uma pe-
quena quantidade de dados experimentais para seu retreinamento. Com tal artifcio, o esti-
mador contempla algumas informac oes n ao inseridas no modelo computacional, como atrito
e saturac ao magn etica da m aquina. Houve uma melhora signicativa da resposta estimada a
partir dessa estrat egia.
Naquele mesmo trabalho, o autor validou o estimador de velocidade em uma aplicac ao
de malha aberta, de excitac ao puramente senoidal e frequ encia xa de operac ao. O autor, no
entanto, considerou que a tens ao do estator pode sofrer variac oes ao longo da operac ao do motor
no ambiente industrial e utilizou essas variac oes no treinamento da rede neural do estimador de
velocidade.
A utilizac ao dessa estrat egia no treinamento do estimador neuro-fuzzy em um sistema de
acionamento em malha fechada, com frequ encia de acionamento vari avel, sem sensores de ve-
locidade e alimentac ao n ao senoidal, caracteriza-se como mais uma contribuic ao deste trabalho
aos acionamentos de alto desempenho do MIT.
Pelo fato da tens ao e a frequ encia de estator serem vari aveis ao longo do acionamento da
m aquina, os valores ecazes das tens oes e correntes de estator foram inicialmente considerados
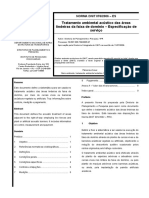
no treinamento do estimador neuro-fuzzy. A gura 1.4 apresenta a estrat egia de treinamento do
estimador utilizada neste trabalho.
Como nesse tipo de acionamento a m aquina estar a sujeita a comandos de velocidade dentro
de uma faixa pr e-determinada de operac ao, particionou-se, ent ao, o conjunto de treinamento do
estimador em faixas de frequ encia denidas. Este m etodo de treinamento se apresenta como
uma alternativa eciente ao treinamento de estimadores de velocidade, para acionamentos de
maquinas de induc ao acionadas por inversores de frequ encia.
33
M
Acionamento
Escalar
ANFIS
Transformao de
Coordenadas e
Treinamento
Valores Eficazes
MIT
I
s
V
s
r
V
s Drms
s
I
V
Drms s
Qrms
Is Qrms
5Hz
60Hz
V/f
r
^
Figura 1.4: Diagrama para desenvolvimento do estimador em malha aberta
Antes de se aplicar a t ecnica anteriormente mencionada ao acionamento vetorial do MIT,
implementou-se uma estrutura de acionamento escalar (V/ f = constante) para a an alise do
processo de treinamento, assim como para a escolha adequada das vari aveis e validac ao do
estimador.
Para a gerac ao das func oes de pertin encia do estimador neuro-fuzzy de velocidade proposto
neste trabalho foi utilizado o m etodo de agrupamento subtrativo associado ao algoritmo de
treinamento hbrido. A apresentac ao dos agrupamentos gerados para as vari aveis de entrada
escolhidas para o estimador pode ajudar os projetistas na melhor adequac ao das vari aveis de
entrada e n umero de pontos dos conjuntos de treinamento. Esta e mais uma contribuic ao deste
trabalho no que diz respeito ao treinamento de sistemas neuro-fuzzy aplicados ao controle de
motores el etricos.
Ainda, com relac ao ao agrupamento subtrativo na gerac ao das func oes de pertin encia,
observou-se que pontos do conjunto de treinamento associados ao rudo de medida possuem
baixa densidade no agrupamento. Isso permitiu que a estrat egia desenvolvida computacional-
mente fosse utilizada diretamente no arranjo experimental. Portanto, ao nal do trabalho, o es-
timador foi treinado com valores puramente experimentais, apresentando respostas satisfat orias
na estimativa da velocidade do MIT.
1.3 Divis ao deste trabalho
Este captulo 1 apresentou uma introduc ao sobre os acionamentos el etricos e os principais
objetivos e contribuic oes deste trabalho.
34
O captulo 2 apresenta uma revis ao da literatura, no que diz respeito ao acionamento do
motor e ` as t ecnicas de estimac ao da velocidade mec anica de rotor com enfase nos sistemas
baseados em intelig encia computacional.
O captulo 3 apresenta a base matem atica do modelo por orientac ao de campo do MIT,
enfatizando a orientac ao no uxo magn etico de entreferro.
O captulo 4 apresenta a base do sistema ANFIS, a t ecnica de agrupamento subtrativo utili-
zada para a gerac ao das func oes de pertin encia e o treinamento hbrido.
Ocaptulo 5 descreve a bancada experimental desenvolvida para os ensaios do acionamento.
O captulo 6 apresenta a estrat egia utilizada para o desenvolvimento do estimador ANFIS
de velocidade, assim como os resultados de simulac ao associados a cada etapa do desenvolvi-
mento.
O captulo 7 apresenta os resultados experimentais do acionamento utilizando o estimador
ANFIS. Resultados do acionamento escalar e vetorial s ao apresentados.
O captulo 8 apresenta as conclus oes do trabalho e as propostas de continuidade.
1.4 Publicac oes relativas ao trabalho
1.4.1 Congressos Cientcos
Lima, F., Kaiser, W., Silva, I. N., Oliveira J unior, A. A., Development of a speed neurofuzzy
estimator for sensorless magnetizing ux induction motor control. The 35
th
Annual Conference
of the IEEE Industrial Electronics Society - IECON 2009, p.3273 -3278, novembro, 2009.
Lima, F., Kaiser, W., Silva, I. N., Oliveira J unior, A. A., Speed neurofuzzy estimator for
sensorless indirect ux oriented induction motor drive. The 36
th
Annual Conference of the
IEEE Industrial Electronics Society - IECON 2010, novembro, 2010. (Aceito para publicac ao)
1.4.2 Peri odicos Cientcos
Lima, F., Kaiser, W., Silva, I. N., Oliveira J unior, A. A., Speed neurofuzzy estimator for
indirect ux oriented induction motor control. IEEE Transactions on Industrial Electronics.
(Submetido)
35
CAP
ITULO 2
Revis ao da Literatura
2.1 T ecnicas de controle do MIT
As t ecnicas de controle para o MIT disponveis industrialmente e mais encontradas na lite-
ratura s ao: o controle escalar, o controle vetorial e o controle direto de torque.
No controle escalar do MIT, adota-se a estrat egia de manter a raz ao entre tens ao e frequ encia
do estator da m aquina constante. Dessa maneira, o torque eletromagn etico pode ser mantido
em um valor constante durante toda a faixa de operac ao de velocidades. Por se tratar de um
sistema de controle que n ao utiliza informac oes de fase das grandezas do MIT, somente apre-
senta bons resultados em regime permanente. Durante o transit orio, e em operac oes em baixas
velocidades, o seu desempenho e considerado insatisfat orio.
Para se obter uma operac ao de elevado desempenho para o MIT devem-se utilizar t ecnicas
de controle vetorial ou controle direto de torque (DTC). Diversas t ecnicas de controle vetorial
para o MIT foram desenvolvidas ao longo das ultimas d ecadas destacando-se o m etodo de
acelerac ao de campo (FAM), e o Controle com Orientac ao de Campo (FOC).
Dentre as tr es t ecnicas, o FOCe o DTCobtiverammaior destaque emaplicac oes acad emicas
e industriais (CASADEI et al., 2002) e ser ao descritos mais detalhadamente a seguir. O m etodo
de acelerac ao de campo e um m etodo de controle vetorial baseado na teoria dos vetores espirais,
utilizando a frequ encia de escorregamento da m aquina (YAMAMURA, 1992).
36
2.1.1 Controle direto de torque
No controle direto de torque, como o pr oprio nome sugere, o torque e a vari avel diretamente
controlada. O DTC convencional n ao requer sensores mec anicos ou transformac ao de coorde-
nadas e depende somente da resist encia do estator da m aquina (BUJA; KAZMIERKOWSKI,
2004). O DTC tem sido extensivamente utilizado na ind ustria devido as caractersticas de
resposta r apida de torque e de robustez as variac oes param etricas da m aquina (LEE et al.,
2001), (LAI; CHEN, 2001), (LASCU; BOLDEA; BLAABJERG, 2005b), (GRABOWISK et
al., 2000).
ODTCapresenta, por em, desvantagens como uma alta ondulac ao de torque embaixas velo-
cidades e variac ao da frequ encia de chaveamento de acordo com as variac oes de par ametros do
motor e da velocidade do rotor. Adicionalmente, para aplicac oes de alta pot encia, a frequ encia
de chaveamento do inversor e limitada, aumentando a ondulac ao do torque a valores indesejados
(LEE; BAE; BLAABJERG, 2005).
2.1.2 Controle por orientac ao de campo
No controle por orientac ao de campo, o torque e controlado de forma indireta. A ideia
b asica do FOC est a em se determinar uma decomposic ao em quadratura para o motor, de tal
maneira que o eixo real coincida com o uxo magn etico da m aquina (rotor, estator ou de en-
treferro) (VAS, 1990), (BLASCKE, 1972), (OGASARAWA; AKAGI; NABAE, 1988). O FOC
possui a desvantagem de ser sensvel as variac oes de par ametros da m aquina, principalmente
da resist encia do rotor (KARANAYIL; MUHAMMED; GRANTHAN, 2005).
Descasamentos entre os par ametros utilizados no controlador e os par ametros reais do mo-
tor degradam o desempenho do sistema. Nesse sentido, observadores e estimadores de estados
podem ser necess arios para que tais par ametros (a resist encia de rotor, por exemplo) sejam
determinados.
Em(TOLIYAT; LEVI; RAINA, 2003) h a uma revis ao sobre as diversas t ecnicas de estimac ao
de par ametros aplicadas ao controle vetorial do MIT. Com a refer encia n ao inercial durante o
transiente, este m etodo viabiliza o controle de uxo e torque de forma desacoplada, exatamente
como em uma m aquina CC com excitac ao independente. Esse tipo de controle est a extrema-
mente difundido industrialmente e ser a o modelo utilizado neste trabalho.
Trabalhos na area de acionamentos do MIT utilizando a t ecnica de orientac ao de campo
usam comumente o sistema de referenciais coincidente com o uxo magn etico de estator ou,
37
principalmente, de rotor.
E proposta desse trabalho utilizar o referencial de orientac ao de campo
coincidente com o uxo de entreferro da m aquina no sentido de avaliar o desempenho do esti-
mador projetado nesse referencial.
2.2 Acionamento sem sensores
No controle vetorial indireto do motor de induc ao o conhecimento da velocidade e da
posic ao mec anica do rotor se torna necess ario. Contudo, a utilizac ao de sensores para realimen-
tac ao de velocidade possui uma s erie de desvantagens, conforme j a apresentado anteriormente.
O controle sem sensor conduz a um menor custo em acionamentos de baixa pot encia e maior
conabilidade em acionamentos de pot encia mais elevada (BOLDEA, 2008).
Nesse sentido, t ecnicas de controle vetorial do MIT, sem a utilizac ao de sensores de veloci-
dade (sensorless), t em sido amplamente discutidas no meio acad emico e aplicadas com sucesso
na ind ustria (KEYHANI; PROCA; MILLER, 2001), (HEREDIA; HIDALGO; PAZ, 2001),
(BOUSSAK; JARRAY, 2006), (KWON; KIM, 2004), (MITRONIKAS; SAFACAS, 2005), (VA-
CLAVEK; BLAHA, 2006), (L
OPEZ et al., 2006), (DERDIYOK, 2005), (KIM et al., 2001),
(HOLTZ, 1993), (NOROOZI-VARCHESHME; RANJBAR-NOIEY; KARIMI-DAVIJANI, 2008).
Em (VAS, 1998) diversas t ecnicas para o controle do MIT sem a utilizac ao de sensores s ao
apresentadas. As primeiras t ecnicas de acionamento sem sensores do MIT previam modelos de
regime permanente e somente se aplicavam a acionamentos de baixo custo. Os acionamentos
sem sensores para aplicac oes de alto desempenho tomaram grande expressividade nos ultimos
anos devido ` as vantagens provenientes da eliminac ao dos sensores mec anicos. No entanto, a
observac ao e estimac ao da velocidade angular de rotor nesse tipo de acionamento muitas vezes
geram modelos matem aticos complexos, de difcil formulac ao e de alta carga computacional
associada ` a implementac ao.
Estimadores de malha aberta com monitorac ao de correntes e tens oes de estator, observa-
dores de estados (Kalman e Luenberger) e modelos de refer encia adaptativos (MRA) s ao cons-
tantemente utilizados em acionamentos sem sensores. T ecnicas de intelig encia computacional
(IC) como l ogica fuzzy, redes neurais articiais, algoritmos gen eticos e sistemas neuro-fuzzy
apresentaram-se nos ultimos anos como promissoras no controle e estimac ao de par ametros em
acionamento sem sensores.
Da revis ao da literatura conclui-se que a maioria das pesquisas ainda est a concentrada no
desenvolvimento de controladores baseados em IC. Dos trabalhos voltados ` a estimac ao da ve-
locidade angular de rotor do MIT, a grande maioria se concentra na utilizac ao de RNA.
38
O sistema de infer encia neuro-fuzzy adaptativo (ANFIS) apresenta-se, nesse sentido, como
uma ferramenta promissora na estimac ao da velocidade angular de rotor do MIT ao combinar
os aspectos positivos das RNA com a l ogica fuzzy.
A seguir s ao apresentados alguns trabalhos que contemplam o ltro estendido de Kalman
(EKF) na estimac ao de velocidade, assim como os trabalhos signicativos de IC na estimac ao
e controle do MIT.
2.3 Filtro estendido de Kalman
Como a velocidade mec anica em um acionamento sem sensores n ao e medida diretamente,
ela deve ser estimada ou observada no sistema de controle. V arias t ecnicas de observac ao de
estados t em sido propostas na literatura, entre as quais o ltro estendido de Kalman (EKF).
A desvantagem da utilizac ao do EKF e a carga computacional associada ` a implementac ao do
ltro, assim como o ajuste otimo de seus par ametros (STRONACH; VAS, 1998).
Em (KIM; SUL; PARK, 1994) encontra-se a proposta de um controle baseado em EKF,
onde as vari aveis estimadas eram a corrente de estator e o uxo do rotor, com bons resultados.
Embora os acionamentos do tipo sem sensores estejam bastante estabelecidos na ind ustria, pro-
blemas em baixas velocidades ainda existem devido ` as incertezas param etricas e ` a relac ao sinal-
rudo existente nessas condic oes(BARUT; BOGOSYAN; GOKASAN, 2007).
Recentemente, para a soluc ao de problemas de baixa velocidade, modelos baseados em
m etodos de estimac ao t em sido propostos (CIRRINCIONE; PUCCI, 2006), (CIRRINCIONE;
PUCCI, 2005) e (EDELBAHER; JEZERNIK; URLEP, 2006).
O artigo de (KANMACHI; TAKAHASHI, 1995) prop oe duas formas de c alculo para sis-
temas sem sensores. No primeiro, a velocidade do rotor e calculada sem informac oes de sua
resist encia, tornando-o livre da depend encia desse par ametro. No segundo, um m etodo direto e
preciso de c alculo da resist encia do rotor e proposto.
O trabalho de (SHIMURA, 1999) utiliza este modelo para representac ao do MIT em regime
transit orio. Como descrito anteriormente, um dos problemas associados ao FOC e a sua de-
pend encia com os par ametros da m aquina, principalmente a constante de tempo do rotor. Nesse
tipo de modelo a estrat egia de controle deve ser, portanto, imune ` as variac oes param etricas da
m aquina. Diversas t ecnicas de controle robusto j a foram utilizadas para a soluc ao desse pro-
blema. Mais recentemente, t ecnicas de IC como a l ogica fuzzy e redes neurais articiais (RNA)
t em sido utilizadas para a soluc ao do problema de depend encia param etrica do modelo vetorial.
39
2.4 Sistemas fuzzy
V arios trabalhos contemplam a aplicac ao de l ogica fuzzy no controle e estimac ao de par a-
metros em motores de induc ao (L
OPEZ et al., 2006), (ROBYNS; BUYSE; LABRIQUE, 1998),
(ROBYNS et al., 2000). O conceito essencial de um controlador baseado em l ogica fuzzy e
um conjunto de regras de controle lingusticas relacionadas com o conceito de fuzzycac ao e
defuzzycac ao de vari aveis (VAS, 1999). Uma vantagem adicional do controle fuzzy e que o
mesmo pode lidar bem com sinais imprecisos corrompidos por rudos (BOSE; PATEL; RAJA-
SHEKARA, 1997).
Alguns trabalhos se concentram na l ogica fuzzy associada ao diagn ostico de falhas, como
o rompimento das barras de rotor de m aquinas de induc ao (NEJJARI; BENBOUZID, 1999),
(DIAS, 2006).
Utilizando l ogica fuzzy, (ZIDANI et al., 2006) propuseram um estimador para a resist encia
do estator da m aquina aplicado ao DTC.
Em (L
OPEZ et al., 2006) encontra-se um sistema de estimac ao de velocidade em um acio-
namento sem sensores. A sada de um estimador de malha aberta e de outro projetado para o
regime estacion ario s ao ponderadas por um sistema fuzzy de Mandani de acordo com o ponto
de operac ao do motor. O acionamento sem sensores e validado sob o m etodo de acelerac ao de
campo (YAMAMURA, 1992). Como os autores se utilizam de l ogica fuzzy para a determinac ao
da m edia ponderada de velocidade, o estimador depende fortemente de conhecimento especia-
lista para a sua sintonia. Al em disso, resultados s ao apresentados apenas para a velocidade
nominal.
O trabalho de (SHIMURA, 1999) utiliza l ogica fuzzy para estimac ao da resist encia do rotor
e do estator da m aquina baseado em MRA.
Em (LIAW; WANG; CHANG, 1996), durante a condic ao de regime estacion ario, um sinal
de velocidade angular de escorregamento adaptado e sintetizado por um controlador fuzzy e
utilizado para ajustar a estimativa original da velocidade angular de escorregamento de tal forma
que a mnima corrente de estator seja obtida. Quando um transiente acontece, o mecanismo de
sintonia fuzzy e inibido e o valor nal do sinal adaptado e mantido.
O trabalho de (VALDENEBRO, 2001) estudou observadores de estados de uxo e veloci-
dade baseados em EKF, modos deslizantes e observador de Luenberger. Algoritmos gen eticos
e l ogica fuzzy foram utilizados para melhorar o desempenho dos estimadores.
Em(UDDIN; RADWAN; RAHMAN, 2002) foi proposto umcontrolador baseado eml ogica
40
fuzzy como substituic ao ao controle PI da malha de velocidade. Os resultados demonstraram
que o controlador fuzzy e mais robusto que o PI no controle vetorial indireto do MIT.
2.5 Redes neurais articiais
O aprendizado e capacidade de adaptac ao das RNA tornam-nas ideais para aplicac oes de
controle. Outras caractersticas importantes associadas ` as RNAs s ao o processamento paralelo
e o mapeamento de sistemas n ao lineares (FUKUDA; SHIBATA, 1992). Uma RNA pode ser
aplicada com sucesso no acionamento de motores, sendo utilizada tanto na estimac ao de estados
quanto na implementac ao de controladores (VAS, 1999).
Em (BA-RAZZOUK et al., 1997) foram desenvolvidos estimadores neurais para o desa-
coplamento de uxo e torque no controle por orientac ao de campo direto e indireto. Embora
os estimadores tenham sido desenvolvidos considerando o referencial de campo no rotor, os
autores sugerem que se pode facilmente utilizar a metodologia desenvolvida nos referenciais de
estator e entreferro da m aquina.
Em (MARINO; MILANO; VASCA, 1999) foi utilizado um estimador baseado em uma
rede neural articial associado a um regulador linear quadr atico (LQR).
Uma estimac ao da velocidade angular de rotor da m aquina utilizando RNAs foi utilizada
por (KIM et al., 2001). Este trabalho apresentou bons resultados experimentais, por em, os
autores enfatizam o ajuste emprico da rede no que se refere ao n umero de neur onios de cada
camada e ao n umero de camadas propriamente dito.
O trabalho de (MOHAMADIAN et al., 2003) utilizou RNAs para a estimac ao do escorre-
gamento da m aquina. Uma RNA tamb em e a respons avel por emular as equac oes do controle
por orientac ao de campo indireto.
Em(CRUZ; PAREDES, 2003) h a a aplicac ao das RNAs na estimac ao da velocidade angular
de rotor e na resist encia de estator em um acionamento DTC do MIT. Foi demonstrado pelos
autores o aumento da eci encia do acionamento em relac ao ` a menor distorc ao harm onica de
corrente com a utilizac ao dos sistemas neurais de estimac ao.
J a o trabalho de (WLAS et al., 2005) utilizou RNAs para corrigir e aumentar o desempenho
do estimador de velocidade convencional em um acionamento sem sensores.
O trabalho de (ROSA, 2005) utilizou uma RNA para estimac ao de velocidade associada ao
EKF para a observac ao da resist encia de rotor do motor. O sistema mostrou-se computacional-
mente robusto ` as variac oes param etricas da m aquina.
41
Considera-se ainda a func ao de rede de base radial (RBFN) largamente utilizada como um
aproximador universal na area de mapeamento n ao linear devido ao seu desempenho (LEE;
BLAABJERG, 2004), (LEE; BAE; BLAABJERG, 2005), (VAS, 1999).
Em (GADOUE; GIAOURIS; FINCH, 2009) apresenta-se um acionamento baseado em
MRA, onde uma RNA faz o papel do modelo de estator da m aquina. O sistema apresenta
boas respostas de estimac ao, mesmo a baixas velocidades.
2.6 Sistemas neuro-fuzzy
Redes neurais articiais podem ser combinadas com a l ogica fuzzy resultando em um sis-
tema neuro-fuzzy com uma grande vantagem sobre a l ogica fuzzy convencional: as func oes de
pertin encia, o n umero de regras e as pr oprias regras s ao produzidas por um processo autom atico
(SUGENO; KANG, 1988). Mais ainda, os controladores puramente fuzzy podem gerar uma
grande carga computacional (BUJA; TODESCO, 1994).
O trabalho de (BOSE; PATEL; RAJASHEKARA, 1997) utilizou uma estrat egia neuro-fuzzy
para o controle vetorial direto de um motor de induc ao com orientac ao no uxo do estator
utilizado em um veculo el etrico. Nessa aplicac ao, o controle neuro-fuzzy atua sobre o regime
estacion ario somente, sendo o transiente controlado por meio de uma outra estrat egia.
Em (VALDENEBRO; HERN
ANDEZ; BIM, 1999) encontra-se a implementac ao de um
controle vetorial em que o sistema neuro-fuzzy foi utilizado para estimac ao da resist encia de
rotor da m aquina.
O trabalho de (AWARE; KOTHARI; SHOUBE, 2000) utiliza um controlador neuro-fuzzy,
em substituic ao ao cl assico controle PI da malha de velocidade, em um acionamento vetorial
do MIT. No ensaio experimental, por em, os autores n ao apresentam respostas em baixas velo-
cidades.
Em (AHN et al., 2001) um controlador neuro-fuzzy de velocidade foi proposto. Naquele
trabalho os autores comprovarama maior eci encia din amica do controlador quando comparado
ao controle escalar Volts por Hertz constante e ao controle vetorial com controle PI cl assico na
malha de velocidade.
Em (PURWANTO; ARIFIN; BIAN-SIOE, 2001) e (PURWANTO et al., 2006) encontra-
se uma proposta de implementac ao de um observador de uxo magn etico do rotor do MIT
utilizando o Sistema de Infer encia Neuro Fuzzy Adaptativo (ANFIS) em um acionamento FOC.
O sistema foi treinado para uma unica frequ encia apresentando bons resultados de simulac ao.
42
Utilizando l ogica neuro-fuzzy (KARANAYIL; MUHAMMED; GRANTHAN, 2005) pro-
puseram um sistema de observac ao para as resist encias do rotor e estator do MIT.
Em (LIN; WAI, 2002) h a a aplicac ao de l ogica neuro-fuzzy no controle de um motor de
induc ao aplicado ao eixo rotativo (spindle) de uma m aquina a comando num erico computa-
dorizado (CNC). A rede utilizada nessa situac ao e uma rede de quatro camadas proposta em
(CHEN; TENG, 1995).
O trabalho de (VASUDEVAN; ARUMUGAM; PARAMASIVAM, 2003) estima todos os
par ametros el etricos do MIT utilizando um sistema neuro-fuzzy. Os autores provaram que a
estimac ao de par ametros se d a de maneira mais precisa do que com as t ecnicas tradicionais.
O trabalho de (HENRIQUES et al., 2004) prop oe um estimador neuro-fuzzy de veloci-
dade para motores a relut ancia chaveados (MRC) . O estimador apresentou bons resultados de
simulac ao e experimentais quando treinado para uma velocidade de refer encia especca.
O trabalho de (WEN; UDDIN, 2004) utiliza um controlador neuro-fuzzy de velocidade em
um acionamento FOC indireto. O destaque do trabalho, embora somente com resultados de
simulac ao, diz respeito ` a aplicac ao de um sinal senoidal de refer encia (o controlador n ao foi
treinado com esse sinal) e vericac ao da excelente resposta obtida. Mais ainda, da mesma
forma que em outros trabalhos citados, o controlador se demonstrou mais robusto ` as variac oes
param etricas do que o controle PI cl assico.
Em (VASUDEVAN; ARUMUGAM, 2004) um controlador neuro-fuzzy foi utilizado em
um acionamento vetorial DTC do MIT com aplicac ao em veculos el etricos. Considerando as
maiores variac oes param etricas existentes nesse tipo de acionamento, o controlador projetado
se demonstrou robusto e de alto desempenho din amico.
Otrabalho de (VALD
`
EZ; ROMERO, 2004) utiliza umcontrolador neuro-fuzzy para controle
de uxo e torque em um esquema de acionamento DTC. O controlador neuro-fuzzy gera o ve-
tor adequado de tens ao de estator e o motor e acionado na estrutura cl assica DTC atrav es de
modulac ao PWM vetorial. O sistema apresentou menor ondulac ao de torque com o controlador
proposto.
Em (UDDIN; WEN, 2005) um observador de uxo baseado em modelo de refer encia adap-
tativo utilizando um sistema neuro-fuzzy e proposto. A malha de velocidade tamb em cont em
um controlador neuro-fuzzy. O sistema de acionamento demonstrou-se robusto ` as variac oes
param etricas e apresentou boas respostas em operac oes com carga.
O trabalho de (AYYUB, 2006) utiliza o sistema neuro-fuzzy para determinac ao do angulo
de disparo dos tiristores em um sistema de partida suave do MIT.
43
Em (YATIM; UTOMO, 2006) um controlador neuro-fuzzy foi utilizado com sucesso em um
acionamento escalar Volts por Hertz aplicado ao acionamento de compressores com velocidade
vari avel. O sistema demonstrou-se eciente no consumo de energia utilizando este controlador.
Em (LIN; SHEN, 2006) h a a utilizac ao de um sistema neuro-fuzzy para controle de uma
mesa de deslocamento x-y com aplicac ao em m aquinas a comando num erico computadorizado
(CNC). O motor utilizado para o acionamento da mesa e sncrono linear com im as permanentes.
Em (ORLOWSKA-KOWALSKA; DYBKOWSKI; SZABAT, 2006) h a a proposta de um
controlador adaptativo para o controle vetorial do MIT sem a utilizac ao de sensores mec anicos
de velocidade. O controle de velocidade utilizando uma rede neuro-fuzzy e baseado em modelo
adaptativo de refer encia (MRA). A estimac ao de uxo utiliza o observador de ordem completa
de Luenberger. O sistema neuro-fuzzy e utilizado para sintonizar o controlador PI da malha de
velocidade.
Otrabalho de (KO; CHOI; CHUNG, 2006) utiliza l ogica fuzzy associada a uma RNAemum
sistema de controle de velocidade. Novamente, quando comparado ao controle PI convencional,
o controlador projetado demonstra maior robustez.
Em (UDDIN; WEN, 2007) e (UDDIN; HUANG; CHY, 2007) um controlador de velo-
cidade neuro-fuzzy, auto-ajust avel, em um acionamento vetorial do MIT foi proposto com a
utilizac ao de sensores mec anicos de velocidade. A vantagem do controlador projetado sobre
os anteriores deve-se ao fato do auto-ajuste do controlador permitir a utilizac ao de um n umero
reduzido de func oes de pertin encia na do controlador, com consequente reduc ao da carga com-
putacional, visando a implementac ao em tempo real.
O trabalho de (CHEOK; WANG, 2005) prop oe um sistema de estimac ao para a posic ao do
rotor em motores a relut ancia. Os autores utilizaram o ANFIS para criar um modelo preciso do
motor a partir de medic oes de uxo magn etico.
Em (PARAMASIVAM et al., 2003) h a o treinamento de um estimador ANFIS para a
determinac ao da posic ao do rotor de um motor a relut ancia. Para tal treinamento, a corrente
e a indut ancia de fase foram utilizadas como entradas do estimador.
Em (PARAMASIVAM et al., 2007) h a a proposta de dois estimadores, um ANFIS e outro
baseado em RNA, para obtenc ao da velocidade de um motor a relut ancia. As tens oes e correntes
de fase foramutilizadas para o treinamento, assimcomo o uxo magn etico de dispers ao. Ambos
os estimadores apresentaram bom desempenho em resultados experimentais com DSP .
(D.MIHAI; R.MIHAI, 2007) compara controladores de corrente por histerese e neuro-fuzzy.
Ficou comprovado naquele trabalho que o controlador neuro-fuzzy pode substituir adequada-
44
mente o controlador de corrente gerando menor ondulac ao de torque com menor sensibilidade
` as variac oes de par ametros do motor.
O trabalho de (RAJAJI; KUMAR, 2008b) apresenta um modelo ANFIS para a estimac ao
da resist encia de estator do MIT em um acionamento DTC. Outro estudo realizado pelos au-
tores consiste na estimac ao do pr oprio modelo do MIT, considerando indut ancias e resist encias
el etricas da m aquina utilizando o sistema ANFIS. Por m, um controlador ANFIS e aplicado
ao acionamento DTC do MIT utilizando a medic ao da rotac ao da m aquina. As estrat egias
apresentadas pelos autores apresentaram bons resultados de simulac ao.
Novamente (RAJAJI; KUMAR, 2008a) propuseram um sistema ANFIS para determinac ao
do angulo de disparo dos tiristores em um sistema de partida suave do MIT. O ANFIS apre-
sentou bom desempenho de simulac ao no que diz respeito ` a sua simplicidade, estabilidade,
precis ao e r apida resposta.
Os trabalhos de (KASHIF; SAQIB, 2007) e (KASHIF; SAQIB, 2008) implementaram um
controle do angulo de disparo dos tiristores em um acionamento de partida suave do MIT. A
velocidade angular do rotor do motor foi estimada por interm edio de uma RNA. Resultados de
simulac ao comprovaram a ec acia do sistema proposto.
Em(CHY; UDDIN, 2009) h a a proposta de umcontrolador neuro-fuzzy aplicado a ummotor
sncrono de im a permanente. O controlador projetado apresentou excelente resposta din amica
e demonstrou robustez na operac ao do motor.
Em (GUPTA; KUMAR; SURJUSE, 2009b) um controlador neuro-fuzzy substitui o controle
PI tradicional da malha de velocidade. Em (GUPTA; KUMAR; SURJUSE, 2009a) se encontra
um acionamento sem sensores baseado em MRA. O sistema neuro-fuzzy foi utilizado como um
observador da corrente de estator. O erro entre a corrente proveniente do observador e corrente
do modelo de refer encia e utilizado pelo mecanismo de adaptac ao. O observador utiliza, como
uma das entradas, o uxo magn etico de rotor, estimado atrav es de uma RNA. Resultados de
simulac ao comprovaram a eci encia do acionamento.
O trabalho de (ORLOWSKA-KOWALSKA; DYBKOWSKI; SZABAT, 2010) apresentou
umacionamento semsensores de dois motores acoplados mecanicamente. Osistema de estimac ao
da velocidade naquele trabalho era baseado em MRA e um sistema neuro-fuzzy substituiu o
controle PI da malha de velocidade. O treinamento do controlador neuro-fuzzy da malha de
velocidade foi feito com o sistema em operac ao a partir do erro de velocidade do estimador
baseado em MRA.
45
2.7 Conclus oes sobre a revis ao da literatura
A partir da revis ao bibliogr aca, se percebe a crescente utilizac ao de sistemas baseados
em IC nos acionamentos de m aquinas el etricas. Todavia, esses trabalhos est ao normalmente
focados no projeto de controladores ou estimac ao de par ametros el etricos da m aquina.
Esse fato acontece, particularmente, com os sistemas neuro-fuzzy.
E mnimo o n umero de
trabalhos que tratam da estimac ao de velocidade do MIT utilizando sistemas neuro-fuzzy.
Nesse sentido, esse trabalho contribui com o assunto propondo um estimador neuro-fuzzy
de malha aberta para a estimac ao de velocidade do MIT.
O desenvolvimento do estimador comeca pela denic ao do modelo vetorial do MIT, apre-
sentado no pr oximo captulo. No captulo 4 s ao apresentadas as bases do sistema neuro-fuzzy e
no captulo 6 a metodologia proposta para o desenvolvimento do estimador.
46
CAP
ITULO 3
Modelo Matem atico do MIT com Orientac ao de Campo -
Refer encia no uxo magn etico de entreferro
3.1 Modelo Vetorial
Apresenta-se a seguir a modelagem vetorial do MIT com orientac ao de campo (VAS, 1998).
Basicamente, a modelagem do MIT por orientac ao de campo pode se dar atrav es dos campos
magn eticos de estator, rotor ou entreferro. Inicialmente, s ao apresentadas as equac oes vetoriais
do MIT sob uma orientac ao de campo gen erica (Ap endice A). As eqs. (3.1), (3.2), (3.3), (3.4),
(3.5), (3.6) e (3.7) para o estator e rotor comum a um referencial gen erico encontram-se a seguir:
u
sg
= R
s
i
sg
+p
sg
+ j
g
sg
(3.1)
u
rg
= R
r
i
rg
+p
rg
+ j(
g
r
)
rg
(3.2)
sg
= L
s
i
sg
+L
m
i
rg
(3.3)
rg
= L
r
i
rg
+L
m
i
sg
(3.4)
47
mg
= L
m
i
mg
= L
m
(
i
sg
+
i
rg
) (3.5)
T
e
=
3
2
P
sg
.
i
sg
(3.6)
p
r
=
1
J
(T
e
B
r
T
l
) (3.7)
3.2 Modelo com orientac ao no uxo magn etico de entreferro
Agura 3.1 apresenta o vetor de espaco da corrente de estator
i
s
e da corrente de magnetizac ao
i
mm
. Os eixos e representam a decomposic ao direta e em quadratura, respectivamente, e
giram espacialmente ` a velocidade angular do rotor da m aquina. Os eixos D e Q representam
as mesmas decomposic oes, por em, s ao espacialmente est aticos. Os eixos x e y representam a
projec ao direta e em quadratura, respectivamente, e giram espacialmente ` a velocidade do uxo
de entreferro da m aquina. Ainda,
m
,
r
,
s
e
sl
referem-se aos angulos do eixo direto do
referencial de magnetizac ao e do rotor, do vetor de espaco da corrente de estator em relac ao ao
referencial estacion ario e ao angulo de escorregamento, respectivamente.
Figura 3.1: Vetores de espaco da corrente de estator e de magnetizac ao (VAS, 1998)
Com a orientac ao no uxo de entreferro da m aquina, a velocidade de referencial gen erico
g
das eqs. (3.1) e (3.2) torna-se a velocidade da corrente e do uxo magn etico de entreferro,
48
denida como
mm
. Os uxos magn eticos do estator e rotor no referencial adotado s ao expres-
sos pelas eqs. (3.8), (3.9), (3.10) e (3.11) a seguir.
sx
= L
s
i
sx
+L
m
i
rx
(3.8)
sy
= L
s
i
sy
+L
m
i
ry
(3.9)
rx
= L
r
i
rx
+L
m
i
sx
(3.10)
ry
= L
r
i
ry
+L
m
i
sy
(3.11)
As componentes da corrente de estator em func ao dos uxos magn eticos s ao apresentadas
nas eqs. (3.12) e (3.13).
i
sx
=
L
r
L
s
L
r
L
m
2
sx
L
m
L
s
L
r
L
m
2
rx
(3.12)
i
sy
=
L
r
L
s
L
r
L
m
2
sy
L
m
L
s
L
r
L
m
2
ry
(3.13)
As componentes de uxo magn etico do estator e rotor em func ao das tens oes de estator e
rotor s ao apresentadas nas eqs. (3.14), (3.15), (3.16) e (3.17).
sx
=
1
p
(u
sx
R
s
i
sx
mm
sy
) (3.14)
sy
=
1
p
(u
sy
R
s
i
sy
mm
sx
) (3.15)
rx
=
1
p
(u
rx
R
r
i
rx
mm
ry
) (3.16)
ry
=
1
p
(u
ry
R
r
i
ry
mm
rx
) (3.17)
Utilizando o sistema referencial no ramo de magnetizac ao do motor, a corrente de magnetizac ao
i
mm
possui apenas componente do eixo direto, sendo representada conforme a eq. (3.18) a se-
guir:
49
i
mm
=
i
s
+
i
r
= (i
sx
+ j
isy
) +(i
rx
+ ji
ry
) (3.18)
Dessa forma pode-se chegar ` as eqs. (3.19) e (3.20):
i
rx
= i
mm
i
sx
(3.19)
i
ry
= i
sy
(3.20)
Ainda, a express ao de torque neste referencial torna-se:
T
e
=
3
2
PL
m
i
mm
i
sy
(3.21)
3.2.1 Equac oes de estator
A partir das equac oes do modelo vetorial gen erico e da escolha do referencial orientado no
uxo magn etico de entreferro, podem-se escrever as equac oes do estator como apresentadas a
seguir nas eqs. (3.22) e (3.23):
u
s
= R
s
i
s
+ p
s
+ j
mm
s
= u
sx
+ ju
sy
(3.22)
u
s
= R
s
(i
sx
+ ji
sx
) + p(L
s
(i
sx
+ ji
sy
) +L
m
(i
rx
+ ji
ry
)) +
+ j
mm
(L
s
(i
sx
+ ji
sy
) +L
m
(i
rx
+ ji
ry
)) (3.23)
Substituindo as eqs. (3.19) e (3.20) na eq. (3.23), obt em-se a eq. (3.24):
u
s
= R
s
(i
sx
+ ji
sx
) + p(L
s
(i
sx
+ ji
sy
) +L
m
((i
mm
i
sx
) ji
sy
)) +
+ j
mm
(L
s
(i
sx
+ ji
sy
) +L
m
((i
mm
i
sx
) ji
sy
)) (3.24)
Finalmente, separando a parte real e imagin aria, obt em-se as eqs. (3.25) e (3.26):
50
u
sx
= R
s
i
sx
+(L
s
L
m
)pi
sx
+L
m
pi
mm
+
mm
(L
m
L
s
)i
sy
(3.25)
u
sy
= R
s
i
sy
+(L
s
L
m
)pi
sy
+L
m
mm
i
mm
+
mm
(L
s
L
m
)i
sx
(3.26)
Para as eqs. (3.25) e (3.26) e possvel isolar as correntes do eixo direto e quadratura, resul-
tando nas eqs. (3.27) e (3.28):
i
sx
=
u
sx
R
s
T
sl
pi
sx
L
m
R
s
pi
mm
+
mm
T
sl
i
sy
(3.27)
i
sy
=
u
sy
R
s
T
sl
pi
sy
mm
(L
sl
i
sx
+L
m
i
mm
)
R
s
(3.28)
onde T
s1
=L
s1
/R
s
e a constante de tempo de dispers ao do estator. As eqs. (3.27) e (3.28) devem
ser consideradas para a implementac ao do controle por orientac ao de campo com refer encia no
uxo magn etico de entreferro para uma m aquina em que se imp oem tens oes no estator. Como
existem componentes de corrente do eixo de quadratura na express ao de corrente do eixo direto
e vice-versa, e necess ario implementar um circuito de desacoplamento entre as mesmas.
3.2.2 Equac oes de rotor
A eq. 3.29 a seguir apresenta a equac ao de tens ao de rotor no referencial de uxo magn etico
de entreferro:
0 = R
r
i
rm
+L
r
p
i
rm
+L
m
p
i
sm
+ j(
m
r
)(L
r
i
rm
+L
m
i
sm
) (3.29)
Para eliminar a depend encia da eq. (3.29) com o vetor espacial da corrente de rotor (a qual
n ao pode ser diretamente medida) no referencial adotado, utilizam-se as eqs. (3.19) e (3.20),
resultando na eq. (3.30):
0 = R
r
(
i
mm
i
sm
) +L
r
p
i
mm
L
r1
p
i
sm
+ j(
m
r
)(L
r
i
mm
L
r1
i
sm
) (3.30)
Segundo (VAS, 1998) estas equac oes anteriormente apresentadas s ao mais complexas em
termos de implementac ao do que as mesmas equac oes considerando a orientac ao de uxo
51
magn etico de rotor. Por esse motivo, os estimadores de velocidade encontrados na literatura,
projetados sob as mais diversas metodologias, s ao aplicados a este referencial. No sentido de
colaborar com o assunto, este trabalho pretende investigar o desempenho do estimador de velo-
cidade no referencial de uxo de entreferro da m aquina.
A soluc ao da eq. (3.30) nas componentes de eixo direto e quadratura no referencial de uxo
magn etico de entreferro resulta nas eqs. (3.31) e (3.32) a seguir:
i
mm
+T
r
pi
mm
T
rl
= pi
sx
+
i
sx
T
rl
sl
i
sy
(3.31)
sl
i
mm
T
r
T
rl
i
sx
= pi
sy
+
i
sy
T
rl
(3.32)
3.2.3 Acionamento com correntes impostas no estator
A partir das eqs. (3.31) e (3.32) pode-se implementar o acionamento vetorial do MIT com
imposic ao de correntes no estator da m aquina. Para o controle da corrente utiliza-se uma banda
de histerese, cujas principais vantagens s ao a facilidade de implementac ao, independ encia da
variac ao dos par ametros da carga e excelente desempenho din amico (KASMIERKOWSKI;
MALESANI, 1998), (BOSE, 1997), (BOLDEA; NASAR, 2006) . A gura 3.2a apresenta o
esquema de acionamento por banda de histerese do inversor VSI, e a gura 3.2b, a excurs ao de
corrente em torno na corrente de refer encia i
. Uma das desvantagens desse tipo de modulac ao e
a possibilidade de ocorr encia de um erro duplo de corrente (BOSE, 1997) conforme apresentado
na gura 3.2b.
A partir da eq. (3.31) e possvel obter a eq. (3.33) a seguir para a componente direta da
corrente de estator:
i
sx
=
(1+T
r
p)i
mm
+i
sy
T
rl
sl
1+T
rl
p
(3.33)
As eqs. (3.32) e (3.33) s ao utilizadas para a implementac ao do controle vetorial indireto
do MIT apresentado na gura B.1. O MIT e acionado atrav es de correntes impostas no estator
pelo inversor com controle de corrente por banda de histerese. Para o acionamento e fornecida
52
Figura 3.2: Acionamento do inversor por banda de histerese (BOSE, 1997)
uma refer encia de corrente de magnetizac ao i
mmre f
e o valor da componente direta da corrente
de estator (i
sx
) respons avel pela gerac ao de uxo magn etico na m aquina e calculada a partir da
eq. (3.33). A partir da express ao de torque no referencial de uxo magn etico de entreferro e
possvel determinar a componente em quadratura da corrente de estator (i
sy
), onde o torque de
refer encia e obtido na sada do controle de velocidade.
Figura 3.3: FOC indireto de entreferro com correntes impostas no estator (VAS, 1998)
Para o sistema de transformac ao de coordenadas do referencial de uxo magn etico de en-
treferro (xy) para o estacion ario (DQ) e necess ario o conhecimento do angulo
m
apresentado
na gura 3.1. Inicialmente a velocidade de escorregamento
sl
e integrada para a obtenc ao do
angulo de escorregamento
sl
. Nesse momento o angulo
m
pode ser determinado a partir da
eq. (3.34) a seguir:
m
=
sl
+
r
(3.34)
53
onde
r
e a posic ao angular do rotor.
Dessa maneira, o conhecimento da velocidade de rotor se torna imprescindvel no controle
vetorial indireto do MIT. O desenvolvimento de um estimador neuro-fuzzy para a determinac ao
da velocidade angular de rotor e apresentado a partir do captulo 6.
3.2.4 Sistema de desacoplamento
Percebe-se a partir das eqs. (3.32) e (3.33) que existe acoplamento entre as componentes
dos eixos direto e quadratura do vetor de espaco da corrente de estator. Como consequ encia,
a corrente de magnetizac ao i
mm
sofrer a alterac oes a partir das mudancas na componente de
torque (i
sy
) da corrente do estator. Esse acoplamento pode ser eliminado a partir de um sistema
de desacoplamento, conforme apresentado a seguir.
Se a corrente de magnetizac ao e controlada por um controlador de uxo magn etico e a sada
desse controlador e
i
sx
, ent ao e necess aria a adic ao de uma corrente de desacoplamento i
dx
para
que seja gerada a corrente de refer encia do eixo direto i
sxre f
. Dessa maneira tem-se:
i
sx
=
i
sx
+i
dx
(3.35)
Substituindo-se a eq. (3.35) na eq. (3.31) resulta a eq. (3.36) a seguir:
i
mm
+T
r
pi
mm
T
rl
= p
i
sx
+
i
sx
T
rl
+ pi
dx
+
i
dx
T
rl
sl
i
sy
(3.36)
Dessa forma, a corrente de magnetizac ao i
mm
poder a ser desacoplada da corrente de estator
se i
dx
for selecionada de tal maneira que o termo
sl
i
sy
seja matematicamente anulado na eq.
(3.36). Portanto, o valor de i
dx
para o desacoplamento ser a:
i
dx
=
sl
i
sy
T
rl
1+ pT
rl
(3.37)
E importante observar que o sistema acoplado e n ao linear. Essa situac ao e contraria ` a ideia
inicial do acionamento vetorial, que prev e que o modelo da m aquina CA seja equivalente ` a
54
m aquina CC de excitac ao independente, cujo modelo e linear.
O acoplamento foi mantido, neste trabalho, para vericar o desempenho do estimador
neuro-fuzzy frente as n ao linearidades associadas ao modelo de acionamento.
55
CAP
ITULO 4
ANFIS: Sistema de infer encia Neuro-Fuzzy adaptativo
4.1 Introduc ao
As sec oes a seguir apresentam os conceitos fundamentais do sistema de infer encia neuro-
fuzzy adaptativo ANFIS, conforme apresentado em (JANG; SUN; MIZUTANI, 1997) e (JANG,
1993). Os sistemas neuro-fuzzy s ao funcionalmente equivalentes aos sistemas de infer encia
fuzzy (JANG; SUN; MIZUTANI, 1997).
Sistemas neuro-fuzzy unem as caractersticas de redes neurais articiais e sistemas fuzzy de
maneira integrada. O n umero e a forma das func oes de pertin encia associadas a cada vari avel
de entrada podem ser obtidas de forma otimizada a partir da apresentac ao de um conjunto de
dados de entrada e sada e execuc ao de um algoritmo de treinamento. O sistema ANFIS pode
aproximar todos os sistemas n ao lineares com menor conjunto de dados de treinamento, maior
rapidez e maior precis ao (HOU; SHEN; LI, 2003).
4.1.1 O sistema de infer encia fuzzy de Sugeno
O sistema de infer encia fuzzy mais utilizado em aplicac oes de controle industrial e baseado
no modelo de Mamdani (MAMDANI, 1977). Os sistemas ANFIS, todavia, s ao baseados no
sistema de infer encia fuzzy de Sugeno, ou Takagi-Sugeno-Kang (TSK). A principal diferenca
do modelo de Sugeno em relac ao ao modelo de Mandani est a no fato de a sada poder ser linear
56
ou constante. Uma regra tpica de um modelo fuzzy de Sugeno tem a forma:
Se Entrada1 = x e Entrada2 = y, ent ao Saidaz = px +qy +r
Para um modelo de Sugeno de ordem zero o nvel de sada z e uma constante (p = q = 0).
Uma das principais vantagens do modelo fuzzy de Sugeno e sua eci encia computacional.
Isto permite a construc ao de modelos fuzzy adaptativos. Desta forma, as func oes de pertin encia
podem ser ajustadas para melhor adaptac ao ao conjunto de dados sem a necessidade de conhe-
cimento especialista (JANG, 1992).
4.1.2 Arquitetura ANFIS
A gura 4.1 a seguir apresenta a estrutura de um sistema fuzzy de Sugeno com duas regras,
que pode sintetizar a derivac ao de um modelo ANFIS, sem qualquer perda de generalidade. A
gura 4.2 apresenta o sistema ANFIS equivalente; nesta gura os n os das mesmas camadas t em
func oes similares, como ser a descrito a seguir.
Figura 4.1: Sistema fuzzy Sugeno com duas entradas e duas regras (JANG; SUN; MIZUTANI,
1997)
Figura 4.2: Arquitetura ANFIS equivalente (JANG; SUN; MIZUTANI, 1997)
Camada 1 Todo n o i nesta camada e um n o adaptativo com uma func ao de n o dada por:
O
1,i
= A
i
(x), para i = 1, 2, ouO
1,i
= B
i2
(y), para i = 3, 4, (4.1)
57
onde x (ou y) e a entrada do n o i e A
i
(ou B
i2
) e o r otulo lingustico associado a esses
n os. Resumidamente, este n o determina o grau de pertin encia das entradas a uma dada
func ao de pertin encia do conjunto de func oes de pertin encia. Par ametros dessa camada
s ao tratados como par ametros de premissa.
Camada 2 Todo n o nessa camada e um n o xo denominado , ao qual a sada e o produto de
todos os sinais de entrada:
O
2,i
=
i
= A
i
(x)B
i
(y) i = 1, 2. (4.2)
Cada n o representa o nvel de disparo de uma regra.
Camada 3 Cada n o nessa camada e um n o xo denominado N. O i
esimo
n o calcula a raz ao do
nvel de disparo da i
esima
regra para a soma do nvel de disparo de todas as regras:
O
3,i
=
i
=
i
1
+
2
, i = 1, 2. (4.3)
Camada 4 Cada n o i desta camada e um n o adaptativo com a func ao de n o dada por:
O
4,i
=
i
f
i
=
i
(p
i
x +q
i
y +r
i
), (4.4)
onde
i
e o nvel de disparo normalizado proveniente da camada 3 e {p
i
, q
i
, r
i
} e o
conjunto de par ametros para este n o. Par ametros nesta camada s ao referenciados como
par ametros consequentes.
Camada 5 O unico n o dessa camada e um n o xo nomeado , o qual calcula a sada total
como um somat orio de todos os sinais de entrada:
Sada total = O
5,i
=
i
f
i
=
i
i
f
i
i
(4.5)
O modelo ANFIS descrito atua equivalentemente como um modelo fuzzy do tipo Sugeno.
4.2 Algoritmo hbrido de aprendizagem
Apartir do sistema ANFIS apresentado na gura 4.1 pode-se observar que, comos par ametros
de premissa xos, a Sada total do sistema pode ser expressa como uma combinac ao linear dos
par ametros consequentes. A sada f na gura 4.2 pode ser reescrita conforme a equac ao (4.6):
58
f =
1
1
+
2
f
1
+
2
1
+
2
f
2
=
1
(p
1
x +q
1
y +r
1
) +
2
(p
2
x +q
2
y +r
2
)
= (
1
x)p
1
+(
1
y)q
1
+(
1
)r
1
+(
2
x)p
2
+(
2
y)q
2
+(
2
)r
2
(4.6)
a qual e linear nos par ametros consequentes p
1
, q
1
, r
1
, p
2
, q
2
, e r
2
.
A partir dessa equac ao se conclui (JANG; SUN; MIZUTANI, 1997) que o algoritmo hbrido
de aprendizagem pode ser aplicado diretamente ao sistema. No algoritmo hbrido de aprendi-
zagem, na etapa de avanco, os par ametros dos consequentes s ao identicados pelo m etodo dos
mnimos quadrados. Na etapa posterior, o erro e propagado para tr as e os par ametros dos ante-
cedentes s ao atualizados pelo m etodo da descida por gradiente.
4.3 Algoritmos para agrupamento
Algoritmos para agrupamento s ao uteis n ao somente para organizar e categorizar dados,
mas tamb em para compreens ao dos mesmos e construc ao de modelos (JANG, 1993). Alguns
algoritmos utilizados para agrupamento s ao: C-means, fuzzy C-means, m etodo de agrupamento
da montanha e agrupamento subtrativo, dentre outros. O agrupamento particiona o conjunto
de dados de tal forma que a similaridade dentro de um grupo e maior do que a dos demais.
E
importante ressaltar que como o particionamento requer uma m etrica de similaridade e como em
geral, as m etricas s ao sensveis ao alcance dos elementos dos vetores de entrada, e importante
que cada vetor de entrada seja normalizado dentro do intervalo [0,1]. Nesse trabalho utiliza-se
o processo de agrupamento subtrativo, o qual ser a descrito com mais detalhes no item 4.3.1.
4.3.1 Agrupamento Subtrativo
No m etodo de agrupamento subtrativo apresentado em (CHIU, 1994) e (CHIU, 1996) os
pontos referentes aos dados de treinamento s ao considerados candidatos ao centro dos grupos.
Esse m etodo possui a vantagem da carga computacional ser proporcional ao n umero de dados e
n ao ` a dimens ao do problema como no caso do m etodo de partic ao (PAIVA; DOURADO, 2004).
Considera-se uma colec ao de n pontos de dados {x
1
, . . . ,x
n
} em um espaco M-dimensional.
Sup oe-se que os pontos de dados tenham sido normalizados dentro de um hiper-cubo. Nessa
situac ao, cada ponto e um candidato a centro do agrupamento e uma medida de densidade no
ponto x
i
e denida conforme a equac ao (4.7) a seguir:
59
D
i
=
n
j=1
exp
x
i
x
j
2
(r
a
/2)
2
(4.7)
onde r
a
e uma constante positiva. Um ponto tem um valor de alta densidade se existem mui-
tos pontos de dados na sua vizinhanca. O raio r
a
dene a vizinhanca; pontos fora desse raio
contribuem pouco para a medida de densidade.
Depois que a medida de densidade de cada ponto foi calculada, o ponto de dado com a mais
alta medida de densidade e selecionado como o primeiro centro de agrupamento. Seja x
c1
o
ponto selecionado e D
c1
sua medida de densidade. A medida de densidade para cada ponto de
dado x
i
e ent ao expressada pela equac ao (4.8) a seguir:
D
i
= D
i
D
c1
exp
x
i
x
c1
2
(r
b
/2)
2
(4.8)
onde r
b
e uma constante positiva. Dessa forma, os dados pr oximos ao primeiro centro de agru-
pamento x
c1
possuir ao medidas de densidade signicativamente reduzidas, fazendo com que
esses pontos provavelmente n ao sejam escolhidos como pr oximos centros de agrupamento. A
constante r
b
dene a vizinhanca que possui reduc oes mensur aveis em sua densidade de medida.
A constante r
b
e normalmente maior que r
a
para prevenir agrupamentos com espacamento re-
duzido. Tipicamente, r
b
= 1.5r
a
(PAIVA; DOURADO, 2004).
Depois que a densidade de medida para cada ponto e revisada , o pr oximo centro de agrupa-
mento x
c2
e selecionado e todas as densidades de medidas para os pontos de dados s ao revisadas
novamente. Esse processo e repetido at e que um n umero suciente de agrupamentos seja ge-
rado.
Uma vantagem do agrupamento subtrativo deve-se ao fato de ser robusto ao rudo, j a que
amostras relativas ao rudo de medida ter ao baixa densidade em relac ao as demais e n ao inuen-
ciar ao signicativamente na escolha dos centros de agrupamento (PAIVA; DOURADO, 2004).
Essa caracterstica permite que o sistema seja treinado com dados puramente experimentais,
com respostas satisfat orias, como ser a futuramente apresentado.
Quando o m etodo de agrupamento subtrativo e utilizado em relac ao aos dados de entradas
e sadas de um sistema, cada agrupamento representa uma certa caracterstica do sistema mode-
lado. O centro de cada agrupamento ser a ent ao utilizado como centro das regras de um sistema
fuzzy do tipo Sugeno. Considera-se que o centro do i
esimo
agrupamento e c
i
, de dimens ao M.
Ent ao, c
i
pode ser decomposto em duas componentes vetoriais p
i
e q
i
, onde p
i
e a parte de
entrada e cont em os primeiros N elementos de c
i
; q
i
e a parte de sada e cont em os ultimos
60
MN elementos de c
i
. Assim, dado um vetor de entrada x, o grau para o qual a regra fuzzy i e
completada e denida pela equac ao 4.9 a seguir:
i
= exp
xp
i
2
(r
a
/2)
2
(4.9)
61
CAP
ITULO 5
Arranjo Experimental
5.1 Descric ao
Com o intuito de demonstrar o desempenho do acionamento vetorial com estimador neuro-
fuzzy de velocidade, uma bancada de testes foi implementada. O sistema completo e composto
pelo MIT, um inversor VSI, placa de sensores de efeito Hall de corrente e tens ao, placa de
aquisic ao de dados NIDAQ6062E e um computador port atil com processador de 1,7MHz e
1GB de mem oria RAM.
A gura 5.1 apresenta o diagrama de blocos do sistema de acionamento implementado.
Para os testes foram montadas duas bancadas. A primeira foi utilizada para a validac ao da me-
todologia proposta de treinamento para o estimador neuro-fuzzy.
E compota de um motor de
induc ao de menor pot encia (200W) e de um tacogerador, como mostra a gura 5.2. O tacogera-
dor possui relac ao de 0,0021V/rpm. Esse conjunto foi utilizado para a validac ao experimental
do estimador. Os par ametros do motor encontram-se no ap endice C. A segunda bancada utiliza
um motor de induc ao com pot encia nominal de 5CV acoplada a uma m aquina CC e possui um
tacogerador acoplado ao eixo do conjunto com constante de ganho igual a 0,06V/rpm. Esse mo-
tor foi utilizado nas simulac oes associadas ao desenvolvimento do estimador. As guras 5.3 e
5.4 apresentam uma vis ao geral do conjunto implementado, ressaltando o circuitos de pot encia
e de controle, respectivamente.
62
Tacogerador L1
L2
L3
Gatilho dos IGBts
Barrameto
CC
P
C
M
C
I
5 6 K
I NSERT T HI S END
M
MG
MIT
NIDAQ6062E
MG
Gerador CC
Carga
PCMCIA
C
Sensores Hall
de
Corrente
Sensores Hall
de
Tenso
Retificador
Trifsico
Figura 5.1: Diagrama de blocos do acionamento experimental
MIT
Tacogerador
Figura 5.2: Acoplamento do motor ao tacogerador
As sec oes a seguir descrevem os elementos de acionamento e controle do sistema da gura
5.1 detalhadamente.
5.1.1 Sensores de efeito Hall
Os sensores de corrente s ao do modelo LA 25-NP (corrente m axima 25 A) e os de tens ao,
LV 25-P (tens ao m axima 500V).
Nos sensores Hall de corrente, a relac ao entre a corrente do circuito prim ario e secund ario
e de 1000 : 1. Dessa forma, a corrente m axima de 25 A no prim ario implica em uma corrente de
secund ario de 25mA. No secund ario do sensor, resistores de derivac ao s ao introduzidos de tal
63
Inversor VSI
MIT
Gerador CC
Fontes de
Alimentao
Figura 5.3: Vis ao geral do sistema de acionamento (destaque ` a etapa de pot encia)
Osciloscpio
THS720P
NIDAQ6062E
(PCMCIA)
Matlab/Simulink
(Real Time
Workshop)
Placa de
Conexo
Figura 5.4: Vis ao geral do sistema de acionamento (destaque ` a etapa de controle)
maneira que se tenha uma tens ao proporcional ` a corrente de secund ario. Essa tens ao e entregue
` a placa de aquisic ao de dados.
Nos sensores Hall de tens ao, resistores de derivac ao s ao respons aveis por gerar a corrente
de prim ario a partir da tens ao aplicada ao sensor. A m axima corrente de prim ario admitida e de
10mA. A relac ao entre a corrente do circuito prim ario e a corrente do circuito secund ario e de
1 : 2, 5. Dessa maneira, a corrente m axima de secund ario e de 25mA. Novamente, resistores de
derivac ao s ao introduzidos de tal maneira que se tenha uma tens ao proporcional ` a corrente de
64
secund ario. Essa tens ao e entregue ` a placa de aquisic ao de dados.
As guras 5.5 e 5.6 apresentam as placas de sensores Hall de tens ao e corrente, respectiva-
mente.
SENSORES HALL DE
TENSO
Figura 5.5: Placa dos sensores Hall de tens ao
SENSORES HALL DE
CORRENTE
Figura 5.6: Placa dos sensores Hall de corrente
65
5.1.2 Placa de aquisic ao de dados
Para a implementac ao do acionamento vetorial do MIT juntamente com o estimador neuro-
fuzzy de velocidade foi utilizada a placa de aquisic ao de dados NIDAQ6062E, da National
Instruments. Tal placa possui a caracterstica de ser suportada pelo pacote de tempo real do
Matlab (Real Time Workshop). Essa caracterstica permitiu que o modelo computacional desen-
volvido no Simulink - tanto escalar, como vetorial- fosse diretamente utilizado no acionamento
experimental do MIT. A tabela 5.1 a seguir apresenta as caractersticas principais da placa de
aquisic ao de dados. A gura 5.7 apresenta a placa de aquisic ao de dados utilizada no controle
do sistema de acionamento.
Figura 5.7: Detalhe da placa NIDAQ6062E
Tabela 5.1: Caractersticas da placa NIDAQ6062E
Par ametro Caracterstica
Amostragem 500KS/s
E/S Digitais 8
Entradas Anal ogicas 16
Sadas Anal ogicas 2
Tens ao E/S Digitais 5V
Alcance de tens ao E/S Anal ogicas (modo diferencial) 10V
Alcance de tens ao E/S Anal ogicas (modo simples) 0 a 10V
Convers ao A/D 12 bits
66
5.1.3 Acoplamento optico
Para isolamento dos sinais de disparo dos IGBTs proveniente da placa de aquisic ao de
dados, um circuito de acoplamento optico foi implementado. A placa de acoplamento est a
apresentada na gura 5.8 a seguir.
Opto-
acopladores
Pulsos de gatilho
(NIDAQ6062E)
Pulsos de gatilho
(Aos IGBTs)
Figura 5.8: Placa de acoplamento optico
5.1.4 Inversor fonte de tens ao
O inversor utilizado para o acionamento do motor e do tipo fonte de tens ao (VSI), da em-
presa Semikron, com pot encia de 7,5KW. O comando do inversor se d a atrav es de modulac ao
PWM por banda de histerese, conforme anteriormente apresentado, sendo a etapa de pot encia
composta por semicondutores do tipo IGBT (Transistor Bipolar de Porta Isolada). A gura 5.9
a seguir apresenta a foto do inversor em quest ao.
Barramento CC
Gatilho dos IGBTs
Figura 5.9: Inversor tipo fonte de tens ao
67
CAP
ITULO 6
Desenvolvimento de um estimador neuro-fuzzy de
velocidade
6.1 Estrat egia para o desenvolvimento do estimador
A partir do sistema ANFIS anteriormente apresentado desenvolveu-se um estimador de
velocidade para o MIT com aplicac ao ao acionamento vetorial sem sensores de velocidade.
Embora este seja o objetivo nal, um estimador para acionamento escalar utilizando a t ecnica
que mant em a relac ao entre tens ao e frequ encia constante foi previamente desenvolvido. Tal
estrat egia foi adotada para vericar de maneira simples e r apida o impacto das vari aveis de
entrada do estimador emtodos os seus aspectos, a saber: n umero, caracterstica fsica e conjunto
de dados para treinamento.
A estrat egia utilizada nesse trabalho foi a de particionar igualmente a faixa operacional de
velocidade do motor. Para o treinamento, ent ao, e gerado um conjunto de dados que cont em
frequ encias de acionamento a partir de 5Hz at e 60Hz para o acionamento escalar. Dessa forma,
a faixa de variac ao de velocidade foi igualmente dividida em doze partes. Essa estrat egia vem
ao encontro da tentativa de unicar o conjunto de treinamento do sistema inteligente.
E consenso na literatura que o conjunto de dados de treinamento deve conter informac oes de
toda a faixa de operac ao do motor (VAS, 1999). Por outro lado, a forma como estas informac oes
s ao apresentadas ao sistema e distinta, nos diversos trabalhos apresentados no captulo de re-
68
vis ao. A gura 6.1 apresenta a estrat egia de treinamento proposta neste trabalho.
M
Acionamento
Escalar
ANFIS
Transformao de
Coordenadas e
Treinamento
Valores Eficazes
MIT
I
s
V
s
r
V
s Drms
s
I
V
Drms s
Qrms
Is Qrms
5Hz
60Hz
V/f
r
^
Figura 6.1: Diagrama para desenvolvimento do estimador em malha aberta
6.2 Considerac oes iniciais
No intuito de treinar o estimador ANFIS de velocidade consideram-se alguns pontos de
partida conhecidos na literatura. (VAS, 1999) utiliza o treinamento de uma rede neural para
aplicac ao em um acionamento vetorial. Para tanto foram utilizadas as tens oes e as correntes do
eixo direto e quadratura no instante atual e com um atraso de perodo de amostragem. No total,
ent ao, o estimador neural de velocidade possua oito vari aveis de entrada: u
sD
(K), u
sD
(K1),
u
sQ
(K), u
sQ
(K1), i
sD
(K), i
sD
(K1), i
sQ
(K) e i
sQ
(K1).
(GOEDTEL, 2007) treinou uma rede neural com os valores ecazes da tens ao e corrente
do estator (u
srms
e i
srms
), sem aplicar qualquer transformac ao trif asica-bif asica. O sistema com
estimador neural apresentou bons resultados associado ` a proposta de bi-validac ao cruzada mo-
dicada apresentada pelo autor. O acionamento do MIT se deu ` a frequ encia nominal com
variac oes de tens ao do estator de acordo com o admitido pela norma NBR-7094.
(ROSA, 2005) Implementou uma rede neural recorrente, onde foram utilizadas como en-
tradas para o treinamento da rede a corrente e a tens ao do eixo quadratura com tr es atrasos
de perodo de amostragem, al em da velocidade tamb em com tr es atrasos de perodo de amos-
tragem. No total, ent ao, o estimador proposto possua nove vari aveis de entrada: u
sy
(K 1),
u
sy
(K2), u
sy
(K3), i
sy
(K1), i
sy
(K2), i
sy
(K3), (K1) (K2) e (K3). Nestas
vari aveis, x e y se referem ao eixo direto e quadratura, respectivamente, em um acionamento
vetorial com orientac ao no uxo magn etico de rotor. A rede foi treinada a partir de dados
extrados da simulac ao.
69
Percebe-se que n ao h a um consenso sobre o n umero e a natureza das vari aveis de entrada
utilizadas no treinamento da rede. Outro assunto controverso diz respeito ` a natureza do conjunto
de dados utilizado no treinamento: quantidade de pontos utilizado para o treinamento e escolha
dos pontos mais signicativos para tal. Segundo (JANG, 1996), o melhor conjunto de vari aveis
para treinamento de um sistema ANFIS e aquele que apresentar menor erro na primeira etapa
de treinamento. Tal armac ao pode n ao ser totalmente verdadeira, embora seja razo avel.
Para contribuir com esse assunto, as sec oes a seguir apresentam diferentes resultados as-
sociados ao treinamento do estimador ANFIS de velocidade. O sistema de acionamento do
motor utilizado para o treinamento do sistema ANFIS prev e o acionamento escalar do mesmo
utilizando a t ecnica Volts por Hertz constante. O resultado ent ao ser a estendido ao acionamento
vetorial com orientac ao de campo descrito no captulo 3. Os par ametros do motor utiliza-
dos na simulac ao encontram-se no ap endice C. No ap endice B, apresenta-se o modelo vetorial
construdo no pacote simulink do Matlab.
6.3 Treinamento utilizando i
sQ
e u
sQ
6.3.1 Treinamento com frequ encia constante
O treinamento do estimador ANFIS nessa etapa foi realizado para a frequ encia de base de
60Hz. Para tal, foram utilizados valores ecazes da tens ao e corrente do estator no eixo em
quadratura u
sQ
e i
sQ
e um perodo de amostragem de 100s. Esse perodo de amostragem e uti-
lizado ao longo de todo o desenvolvimento deste captulo. Das oitenta mil amostras geradas pela
simulac ao, foram extradas oito mil para o treinamento e quatro mil para validac ao igualmente
espacadas (BARADA; SINGH, 1998). O erro quadr atico m edio associado ao treinamento foi
de 3, 39x10
2
ap os vinte etapas. As func oes de pertin encia geradas antes e depois do treina-
mento est ao apresentadas na gura 6.2. A gura 6.3 apresenta os resultados para a velocidade
calculada pelo modelo e a estimada pelo estimador ANFIS. A partir do agrupamento subtrativo
foram geradas duas func oes de pertin encia gaussianas para cada uma das entradas. As guras
6.4(a) e 6.4(b) apresentam respectivamente o conjunto de dados de treinamento para a corrente
i
sQ
e para a tens ao u
sQ
com os centros de agrupamentos gerados pelo m etodo subtrativo.
Na sequ encia, o n umero de amostras para o treinamento e validac ao foi reduzido em dez
vezes, ou seja, oitocentas amostras para o treinamento e quatrocentas para validac ao. Nova-
mente foram geradas tr es func oes de pertin encia para cada uma das entradas. Observou-se
um erro quadr atico m edio de 8x10
3
ap os vinte etapas de treinamento, menor que na situac ao
de treinamento anterior. As func oes de pertin encia geradas antes e depois do treinamento est ao
70
apresentadas na gura 6.5. A gura 6.6 apresenta os resultados para a velocidade calculada pelo
modelo e a estimada pelo estimador ANFIS. A partir do agrupamento subtrativo foram geradas
duas func oes de pertin encia gaussianas para cada uma das entradas. Importante observar na
gura 6.2 a exist encia de func oes de pertin encia sobrepostas. Essas func oes podem adequada-
mente serem fundidas(PAIVA; DOURADO, 2004), reduzindo assim, a carga computacional
associada ao estimador.
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
isQRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Antes do Treinamento
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
usQRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Antes do Treinamento
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
isQRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Depois do Treinamento
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
usQRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Depois do Treinamento
Figura 6.2: Func oes de pertin encia para u
sQ
e i
sQ
com oito mil amostras
0 1 2 3 4 5 6 7 8
x 10
4
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Amostras
V
e
l
o
c
i
d
a
d
e
s
(
p
u
)
Velocidades
Velocidade Calculada
Velocidade Estimada
Figura 6.3: Velocidades calculada e estimada para oito mil amostras
71
(a) Agrupamento subtrativo para a corrente i
sQ
(b) Agrupamento subtrativo para a tens ao u
sQ
Figura 6.4: Agrupamentos subtrativos de corrente e tens ao
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
isQRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Antes do Treinamento
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
usQRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Antes do Treinamento
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
isQRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Depois do Treinamento
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
usQRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Depois do Treinamento
Figura 6.5: Func oes de pertin encia para u
sQ
e i
sQ
com oitocentas amostras
72
0 1 2 3 4 5 6 7 8
x 10
4
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Velocidades
Amostras
V
e
l
o
c
i
d
a
d
e
s
(
p
u
)
Velocidade Calculada
Velocidade Estimada
Figura 6.6: Velocidades calculada e estimada para oitocentas amostras
Os dois resultados apresentados anteriormente demonstram a eci encia do sistema ANFIS
na estimac ao da velocidade do MIT sob condic oes nominais de alimentac ao. Como se espera
que este estimador apresente bom desempenho em malha fechada, onde a m aquina estar a sujeita
` as tens oes de entrada n ao senoidais e frequ encia vari avel, torna-se necess aria a mudanca de
enfoque para o treinamento.
6.4 Treinamento utilizando i
sD
e i
sQ
6.4.1 Treinamento com frequ encia constante
Como mencionado no nal da sec ao anterior, deseja-se um bom desempenho de malha fe-
chada para o estimador. Como a corrente do MIT, mesmo sujeito a tens oes de alimentac ao n ao
senoidais, possui um car ater aproximadamente senoidal, decidiu-se treinar o estimador somente
com entradas de corrente. Novamente, foram utilizadas duas entradas: os valores ecazes da
componentes no eixo direto i
sD
e em quadratura i
sQ
da corrente no estator. Para essa nova
situac ao de entrada foram utilizadas condic oes nominais de tens oes e frequ encia na m aquina
utilizando oito mil amostras para o treinamento e quatro mil amostras para validac ao inicial-
mente, e, na sequ encia, oitocentas amostras para o treinamento e quatrocentas para validac ao.
O erro quadr atico m edio associado ao treinamento foi de 1, 95x10
2
e 1, 57x10
4
ap os vinte
etapas de treinamento, para oito mil amostras e oitocentas amostras, respectivamente. Nova-
73
mente, observa-se que um conjunto de treinamento com um n umero menor de amostras resulta
em um erro menor.
As guras 6.7 e 6.8 apresentam as func oes de pertin encia geradas antes e depois do trei-
namento do estimador para oito mil, e oitocentas amostras, respectivamente. O treinamento
utilizando somente correntes como entrada do estimador aumentou o n umero de func oes de
pertin encia para cada uma delas. Agora, tem-se tr es func oes de pertin encia para cada entrada.
As guras 6.9 e 6.10 apresentam os resultados de velocidade calculada a partir do modelo do
MIT e estimada pelo ANFIS.
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
isDRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Antes do Treinamento
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
isQRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Antes do Treinamento
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
isDRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Depois do Treinamento
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
isQRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Depois do Treinamento
Figura 6.7: Func oes de pertin encia para i
sD
e i
sQ
com oito mil amostras
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
isDRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Antes do Treinamento
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
isQRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Antes do Treinamento
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
isDRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Depois do Treinamento
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
isQRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Depois do Treinamento
Figura 6.8: Func oes de pertin encia para i
sD
e i
sQ
com oitocentas amostras
74
0 1 2 3 4 5 6 7 8
x 10
4
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Velocidades
Amostras
V
e
l
o
c
i
d
a
d
e
s
(
p
u
)
Velocidade Calculada
Velocidade Estimada
Figura 6.9: Velocidades calculada e estimada para oito mil amostras
0 1 2 3 4 5 6 7 8
x 10
4
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Velocidades
Amostras
V
e
l
o
c
i
d
a
d
e
s
(
p
u
)
Velocidade Calculada
Velocidade Estimada
Figura 6.10: Velocidades calculada e estimada para oitocentas amostras
75
As guras 6.11(a) e 6.11(b) apresentam, respectivamente, o conjunto de dados de treina-
mento para a corrente i
sD
e para a corrente i
sQ
com os centros de agrupamentos gerados pelo
m etodo subtrativo.
(a) Agrupamento subtrativo para a corrente i
sD
(b) Agrupamento subtrativo para a corrente i
sQ
Figura 6.11: Agrupamentos subtrativos utilizando somente as correntes do estator
6.4.2 Treinamento com frequ encia vari avel
Os resultados anteriormente apresentados dizem respeito ao treinamento do estimador AN-
FIS de velocidade utilizando diferentes vari aveis de entrada, mas sempre com frequ encia e
tens ao de alimentac ao nominal no motor. Nesta sec ao, s ao apresentados resultados de trei-
namento utilizando valores de frequ encia contidos na faixa de operac ao do MIT. A faixa de
operac ao de frequ encia foi particionada igualmente em intervalos de cinco hertz.
Para essa nova condic ao de treinamento, o erro m edio quadr atico se tornou extremamente
elevado (da ordem de vinte por cento). Modicac oes no n umero de amostras utilizadas para o
treinamento n ao implicaram em variac oes signicativas no resultado de treinamento do estima-
dor. Da mesma maneira, a utilizac ao de uma entrada de tens ao e uma de corrente anteriormente
proposta tamb em n ao gerou resultados satisfat orios. A gura 6.12 apresenta as func oes de per-
tin encia das vari aveis de entrada antes e depois do treinamento. As guras 6.13, 6.14, e 6.15
apresentam o conjunto de treinamento, e a resposta de treinamento e validac ao ao conjunto de
amostras iniciais apresentados ao sistema, respectivamente.
76
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
isDRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Antes do Treinamento
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
isQRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Antes do Treinamento
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
isDRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Depois do Treinamento
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
isQRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Depois do Treinamento
Figura 6.12: Func oes de pertin encia para i
sD
e i
sQ
com particionamento de frequ encia
0 2000 4000 6000 8000 10000
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Dados de Treinameno
Amostras
A
m
p
l
i
t
u
d
e
Figura 6.13: Conjunto de dados de treinamento
77
0 2000 4000 6000 8000 10000
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Amostras
S
a
d
a
Dados de treinamento x Sada ANFIS
dados de treinamento
Sada ANFIS
Figura 6.14: Teste do estimador para o conjunto de treinamento
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Amostras
S
a
d
a
Dados de Validao x Sada ANFIS
Dados de Validao
Sada ANFIS
Figura 6.15: Teste do estimador para o conjunto de validac ao
As guras 6.16(a) e 6.16(b) apresentam respectivamente o conjunto de dados de treina-
mento para a corrente i
sD
e para a corrente i
sQ
com os centros de agrupamentos gerados pelo
m etodo subtrativo.
78
(a) Agrupamento subtrativo para a corrente i
sD
(b) Agrupamento subtrativo para a corrente i
sQ
Figura 6.16: Agrupamentos subtrativos utilizando somente as correntes do estator com parti-
cionamento de frequ encia
6.5 Treinamento utilizando i
sD
, i
sQ
, u
sD
, u
sQ
6.5.1 Treinamento com frequ encia vari avel
Conforme os resultados descritos na sec ao anterior, o estimador treinado com valores de
frequ encia dentro da faixa operacional da m aquina e duas vari aveis de entrada n ao apresentou
resultados satisfat orios. Decidiu-se, ent ao, aumentar o n umero de vari aveis de entrada para o
treinamento do estimador. Nessa nova topologia foram utilizados valores ecazes das correntes
e tens oes do eixo direto e quadratura do estator da m aquina. Com esta nova topologia o esti-
mador apresentou um erro quadr atico m edio de treinamento de 1, 5x10
2
para quatrocentas e
oitenta amostras de treinamento ap os vinte etapas. As guras 6.17, 6.18, 6.19, 6.20, e 6.21 apre-
sentam as func oes de pertin encia para as entradas, antes e depois do treinamento, o conjunto de
treinamento, e a resposta de treinamento e validac ao ao conjunto de dados iniciais apresentados
ao sistema, respectivamente.
Ap os o treinamento do estimador ANFIS utilizando a metodologia de particionamento em
frequ encia o sistema foi testado com frequ encias que n ao faziam parte do conjunto de treina-
mento. As guras 6.22, 6.23 e 6.24 a seguir apresentam as respostas de velocidade do motor
para as frequ encias de trinta e tr es, quarenta e sete hertz e treze hertz, respectivamente.
79
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
isDRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Antes do Treinamento
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
isQRMS
D
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Antes do Treinamento
0.2 0.4 0.6 0.8
0
0.2
0.4
0.6
0.8
1
usDRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Antes do Treinamento
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
usQRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Antes do Treinamento
Figura 6.17: Func oes de pertin encia iniciais para u
sD
, u
sQ
, i
sD
e i
sQ
com particionamento de
frequ encia
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
isDRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Depois do Treinamento
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
isQRMS
D
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Depois do Treinamento
0.2 0.4 0.6 0.8
0
0.2
0.4
0.6
0.8
1
usDRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Depois do Treinamento
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
usQRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Depois do Treinamento
Figura 6.18: Func oes de pertin encia p os treinamento para u
sD
, u
sQ
, i
sD
e i
sQ
com particiona-
mento de frequ encia
80
0 100 200 300 400 500
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Dados de Treinamento
Amostras
A
m
p
l
i
t
u
d
e
Figura 6.19: Conjunto de dados de treinamento
0 100 200 300 400 500
0.2
0
0.2
0.4
0.6
0.8
1
1.2
Dados de Treinamento X Saida ANFIS
Amostras
A
m
p
l
i
t
u
d
e
Dados de Treinamento
Saida ANFIS
Figura 6.20: Teste do estimador para o conjunto de treinamento
81
0 50 100 150 200 250
0.2
0
0.2
0.4
0.6
0.8
1
1.2
Dados de Validao X Sada ANFIS
Amostras
A
m
p
l
i
t
u
d
e
Dados de Validao
Sada ANFIS
Figura 6.21: Teste do estimador para o conjunto de validac ao
1 2 3 4 5 6 7 8
x 10
4
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0.55
Velocidades
Amostras
V
e
l
o
c
i
d
a
d
e
s
(
p
u
)
Velocidade Calculada
Velocidade Estimada
Figura 6.22: Resposta para trinta e tr es hertz
82
1 2 3 4 5 6 7 8
x 10
4
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Velocidades
Amostras
V
e
l
o
c
i
d
a
d
e
s
(
p
u
)
Velocidade Calculada
Velocidade Estimada
Figura 6.23: Resposta para quarenta e sete hertz
1 2 3 4 5 6 7 8
x 10
4
0.05
0.1
0.15
0.2
0.25
Velocidades
Amostras
V
e
l
o
c
i
d
a
d
e
s
(
p
u
)
Velocidade Calculada
Velocidade Estimada
Figura 6.24: Resposta para treze hertz
As guras 6.25(a), 6.25(b),6.25(c) e 6.25(d) apresentam respectivamente o conjunto de
dados de treinamento para a corrente i
sD
, para a corrente i
sQ
, para a tens ao u
sD
e a tens ao u
sQ
,
respectivamente, com os centros de agrupamentos gerados pelo m etodo subtrativo.
83
(a) Agrupamento subtrativo para a corrente i
sD
(b) Agrupamento subtrativo para a corrente i
sQ
(c) Agrupamento subtrativo para a corrente i
sD
(d) Agrupamento subtrativo para a corrente i
sQ
Figura 6.25: Agrupamentos subtrativos utilizando somente as correntes do estator com parti-
cionamento de frequ encia
6.6 Treinamento utilizando i
sD
, i
sQ
, u
sD
, u
sQ
no modelo veto-
rial
6.6.1 Treinamento com frequ encia vari avel
O m etodo utilizado em malha aberta aplicado ` a estrat egia (V/ f = constante), de parti-
cionamento de frequ encia, e agora aplicado ao acionamento vetorial com orientac ao de uxo
magn etico de entreferro. A faixa de operac ao de velocidade proposta e de zero a trezentos e
cinquenta radianos por segundo. Esta faixa foi igualmente dividida em frequ encias de 10 em
10Hz. Foram utilizadas setecentas amostras para o conjunto de treinamento e trezentas e cin-
quenta amostras para o conjunto de validac ao. As guras 6.26, 6.27, 6.28, 6.29, 6.30 e 6.31 a
84
seguir apresentam as func oes de pertin encia antes e depois do treinamento, o conjunto de dados
de treinamento e validac ao e a resposta do estimador aos conjuntos anteriores, respectivamente.
Para este conjunto de dados seis func oes de pertin encia foram geradas para cada vari avel de
entrada atrav es do m etodo de agrupamento subtrativo. O erro quadr atico m edio gerado ap os
dez etapas de treinamento foi de 1, 58x10
2
.
0 0.1 0.2 0.3 0.4
0
0.2
0.4
0.6
0.8
1
isQRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Antes do Treinamento
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
usDRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Antes do Treinamento
0 0.5 1
0
0.2
0.4
0.6
0.8
1
usQRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Antes do Treinamento
0 0.1 0.2 0.3 0.4
0
0.2
0.4
0.6
0.8
1
isDRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Antes do Treinamento
Figura 6.26: Func oes de pertin encia iniciais para u
sD
, u
sQ
, i
sD
e i
sQ
com particionamento de
frequ encia no acionamento vetorial
0 0.1 0.2 0.3 0.4
0
0.2
0.4
0.6
0.8
1
isQRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Depois do Treinamento
0 0.2 0.4 0.6
0
0.2
0.4
0.6
0.8
1
usDRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Depois do Treinamento
0 0.5 1
0
0.2
0.4
0.6
0.8
1
usQRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Depois do Treinamento
0 0.1 0.2 0.3 0.4
0
0.2
0.4
0.6
0.8
1
isDRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Depois do Treinamento
Figura 6.27: Func oes de pertin encia p os treinamento para u
sD
, u
sQ
, i
sD
e i
sQ
com particiona-
mento de frequ encia no acionamento vetorial
85
0 100 200 300 400 500 600 700
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Dados de Treinamento
Amostra
A
m
p
l
i
t
u
d
e
Figura 6.28: conjunto de dados de treinamento - IFOC
0 50 100 150 200 250 300 350
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Dados de Validao
Amostras
A
m
p
l
i
t
u
d
e
s
Figura 6.29: Conjunto de dados de validac ao - IFOC
86
0 100 200 300 400 500 600 700
0.2
0
0.2
0.4
0.6
0.8
1
1.2
Dados de Treinamento X Sada ANFIS
A
m
p
l
i
t
u
d
e
Amostras
Dados de Treinamento
Sada ANFIS
Figura 6.30: Conjunto de dados de treinamento (Reduzido) - IFOC
0 50 100 150 200 250 300 350
0.2
0
0.2
0.4
0.6
0.8
1
Dados de Validao X Sada ANFIS
A
m
p
l
i
t
u
d
e
Amostras
Dados de Validao
Sada ANFIS
Figura 6.31: Conjunto de dados de validac ao (Reduzido) - IFOC
87
As guras 6.32(a), 6.32(b),6.32(c) e 6.32(d) apresentam respectivamente o conjunto de
dados de treinamento para a corrente i
sD
, para a corrente i
sQ
, para a tens ao u
sD
e a tens ao u
sQ
,
respectivamente, com os centros de agrupamentos gerados pelo m etodo subtrativo.
Posteriormente ao treinamento, o sistema ANFIS foi inserido no modelo de malha fechada
e ent ao submetido a um comando de refer encia de 222 rad/s que n ao fazia parte do conjunto
de treinamento e validac ao. A gura 6.33 apresenta o resultado de velocidade estimado em
confronto com o calculado pelo modelo.
(a) Agrupamento subtrativo para a corrente i
sD
(b) Agrupamento subtrativo para a corrente i
sQ
(c) Agrupamento subtrativo para a corrente i
sD
(d) Agrupamento subtrativo para a corrente i
sQ
Figura 6.32: Agrupamentos subtrativos utilizando somente as correntes do estator com parti-
cionamento de frequ encia no acionamento vetorial
88
0 1 2 3 4 5
500
0
500
1000
1500
2000
2500
Velocidades
Tempo(s)
V
e
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
Velocidade Calculada
Velocidade Estimada
Figura 6.33: Teste do estimador para o conjunto de validac ao
O resultado obtido demonstrou, a n ao ser pelo instante de aplicac ao do degrau, que o es-
timador neuro-fuzzy pode identicar o modelo din amico do MIT com boa precis ao. Mais im-
portante ainda, o m etodo de treinamento proposto neste trabalho se apresenta eciente, com
rapidez de treinamento, baixo erro associado e capacidade de generalizac ao da velocidade esti-
mada. Estudos sobre a inserc ao de um n umero maior de amostras na partida da m aquina podem
ser realizados, para a avaliac ao do erro de estimativa nesse instante. Para que a substituic ao do
sensor mec anico de velocidade no acionamento seja realmente possvel, o sistema neuro-fuzzy
deve possuir recorr encia, j a que o MIT e um sistema din amico (ROSA, 2005), (VAS, 1999),
(CUC
`
E et al., 1996), (SHIN; XU, 2009). A sec ao a seguir descreve a resposta do sistema
neuro-fuzzy com recorr encia da sada estimada.
6.7 Treinamento no modelo vetorial utilizando sistema ANFIS
recorrente
Para que o estimador projetado substitua completamente o sensor de velocidade no aciona-
mento vetorial, treinou-se um sistema com recorr encia. O sistema recorrente considerando os
valores ecazes de tens oes e correntes anteriormente utilizados n ao apresentaram resultados sa-
tisfat orios em malha fechada. Dessa forma, um novo conjunto de vari aveis foi utilizado. Nessa
nova abordagem, foram utilizadas como entradas do estimador a corrente do eixo quadratura
(i
sy
), com dois atrasos de perodo de amostragem, al em da velocidade estimada, tamb em com
dois atrasos de perodo de amostragem. Resumindo, t em-se agora as seguintes entradas para o
estimador: i
sy
(K), i
sy
(K 1), i
sy
(K 2), (K 1), e (K 2). Os resultados utilizando essa
89
nova congurac ao s ao apresentados a partir da pr oxima sec ao.
6.7.1 Treinamento com frequ encia constante
Antes de se utilizar o treinamento para toda a faixa de operac ao do motor, procedeu-se o
treinamento com algumas frequ encias particulares em baixas velocidades at e uma frequ encia
de acionamento pr oxima ` a nominal da m aquina. Os comandos de velocidades impostos foram
de 10, 50, 100 e 300 rad/s. Os erros quadr aticos m edios ap os quinze epocas de treinamento
foram de 3, 041x10
6
, 2, 85x10
6
, 2, 18x10
6
, e 1, 64x10
6
respectivamente. Foram utilizadas
oitocentas amostras para o treinamento e quatrocentas amostras para a validac ao do estimador.
A guras 6.34(d), 6.34(c), 6.34(b) e 6.34(a) apresentam os resultados aos comandos de veloci-
dade impostos ao modelo IFOC e do estimador. Ainda, s ao apresentadas as curvas de resposta
das correntes de linha do estator, corrente de magnetizac ao e torque do acionamento, para o
comando de trezentos rad/s, nas guras 6.35, 6.36 e 6.37, respectivamente.
0 0.5 1 1.5 2 2.5
x 10
5
50
0
50
100
150
200
250
300
350
Velocidades
Amostras
V
e
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
Velocidade Calculada
Velocidade Estimada
(a) Respostas de velocidade a um comando de 300
rad/s
0 2 4 6 8 10 12 14
x 10
4
20
0
20
40
60
80
100
120
Velocidades
Amostras
V
e
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
Velocidade Calculada
Velocidade Estimada
(b) Respostas de velocidade a um comando de 100
rad/s
0 1 2 3 4 5 6
x 10
4
10
0
10
20
30
40
50
60
Velocidades
Amostras
V
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
Velocidade Calculada
Velocidade Estimada
(c) Respostas de velocidade a um comando de 50 rad/s
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 10
4
2
0
2
4
6
8
10
12
Velocidades
Amostras
V
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
Velocidade Calculada
Velocidde Estimada
(d) Respostas de velocidade a umcomando de 10 rad/s
Figura 6.34: Respostas a comandos especcos de velocidade - IFOC
90
6.22 6.23 6.24 6.25 6.26 6.27
x 10
4
50
40
30
20
10
0
10
20
30
40
50
Correntes do Acionamento
Amostras
A
m
p
l
i
t
u
d
e
s
(
A
)
IL
IL*
Figura 6.35: Detalhes das correntes do acionamento IFOC
0 0.5 1 1.5 2 2.5
x 10
5
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Corrente de Magnetizao
Amostras
A
m
p
l
i
t
u
d
e
(
A
)
Figura 6.36: Corrente de magnetizac ao
91
0 1 2 3 4 5 6
x 10
5
5
0
5
10
15
20
Torque
Amostras
A
m
p
l
i
t
u
d
e
(
N
m
)
Figura 6.37: Curva de torque do acionamento IFOC
6.7.2 Treinamento com frequ encia vari avel
A seguir, nas guras 6.38, 6.39, 6.40, 6.41, 6.42, 6.43 e 6.44 s ao apresentadas as respostas
do estimador ANFIS ao conjunto de treinamento e validac ao, as func oes de pertin encia geradas
ap os o treinamento e as respostas do estimador aos comandos de 65, 135, 225 e 285 rad/s ,
respectivamente.
Esses comandos de velocidade n ao faziam parte do conjunto de treinamento e validac ao do
estimador, caracterizando dessa forma, sua capacidade de generalizac ao.
92
0 500 1000 1500 2000 2500 3000 3500
0.2
0
0.2
0.4
0.6
0.8
1
Amostras
S
a
d
a
Dados de treinamento x Sada ANFIS
Treinamento
Sada ANFIS
Figura 6.38: Teste do estimador para o conjunto de treinamento
0 200 400 600 800 1000 1200 1400 1600
0.2
0
0.2
0.4
0.6
0.8
1
Amostras
S
a
d
a
Dados de validao x Sada ANFIS
Dados de validao
Sada ANFIS
Figura 6.39: Teste do estimador para o conjunto de validac ao
93
0 0.2 0.4 0.6 0.8
0
0.5
1
isy
G
r
a
u
d
e
P
e
r
t
i
n
e
n
c
i
a
0 0.2 0.4 0.6 0.8
0
0.5
1
isy(K1)
G
r
a
u
d
e
P
e
r
t
i
n
e
n
c
i
a
0 0.2 0.4 0.6 0.8
0
0.5
1
isy(K2)
G
r
a
u
d
e
P
e
r
t
i
n
e
n
c
i
a
0 0.2 0.4 0.6 0.8
0
0.5
1
W(K1)
G
r
a
u
d
e
P
e
r
t
i
n
e
n
c
i
a
0 0.2 0.4 0.6 0.8
0
0.5
1
W(K2)
G
r
a
u
d
e
P
e
r
t
i
n
e
n
c
i
a
Figura 6.40: Func oes de pertin encia ap os o treinamento
0 2 4 6 8 10 12 14
x 10
4
0
50
100
150
200
250
300
Velocidades
Amostras
V
e
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
Velocidade Calculada
Velocidade Estimada
Figura 6.41: Resposta ao comando de velocidade de 285 rad/s
94
0 2 4 6 8 10 12
x 10
4
0
50
100
150
200
250
Velocidades
Amostras
V
e
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
Velocidade Calculada
Velocidade Estimada
Figura 6.42: Resposta ao comando de velocidade de 225 rad/s
0 1 2 3 4 5 6 7
x 10
4
0
20
40
60
80
100
120
140
Velocidades
Amostras
V
e
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
Velocidade Calculada
Velocidade Estimada
Figura 6.43: Resposta ao comando de velocidade de 135 rad/s
95
0 0.5 1 1.5 2 2.5 3 3.5 4
x 10
4
0
10
20
30
40
50
60
70
Velocidades
Amostras
V
e
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
Velocidade Calculada
Velocidade Estimada
Figura 6.44: Resposta ao comando de velocidade de 65 rad/s
6.8 Erros associados ao estimador ANFIS
A seguir e elaborado um resumo sobre os erros associados ao estimador ANFIS de ve-
locidade. S ao apresentados tanto a soma dos erros quadr aticos associados ao treinamento do
estimador, quanto os erros m edios relativos associados ` a generalizac ao do estimador. A tabela
6.1 apresenta a soma dos erros quadr aticos (SEQM) associados aos diversos conjuntos de trei-
namento e vari aveis de entrada apresentadas anteriormente. Na tabela 6.2 s ao apresentados os
erros m edios relativos (EMR) de treinamento.
Otreinamento da rede neuro-fuzzy se inicia coma denic ao de umcrit erio para minimizac ao
de erro. O erro quadr atico m edio e, ent ao, utilizado para esse m (6.2). O erro total da rede E
(6.1) , e denido como a soma dos erros quadr aticos m edios, E(n), calculado para cada padr ao
de treinamento (n), com (A) representando o n umero de padr oes de treinamento, e T(n) e O(n)
representando o valor de sada desejado e o determinado pela rede, respectivamente. A eq. (6.3)
foi utilizada para o c alculo do erro m edio relativo entre a sada calculada pelo modelo T(i) nos
diversos acionamentos e a sada da rede O(i). Nessa express ao, (k) indica o n umero de amostras
de simulac ao utilizadas para o c alculo do erro.
O erro relativo e extremamente elevado nas primeiras amostras associadas ao acionamento
escalar do motor. Essa situac ao pode ser observada nas guras anteriormente apresentadas. Por
esse motivo, essas amostras n ao foram consideradas no c alculo dos erros da tabela 6.2.
96
E =
1
A
A
n=1
E(n) (6.1)
E(n) =
1
2
(T(n) O(n))
2
(6.2)
EMR =
1
k
k
i=1
|T(i) O(i)|
|T(i)|
.100% (6.3)
Tabela 6.1: Soma dos erros quadr aticos m edios de treinamento
Vari aveis Amostras SEQM Modelo
u
sQrms
e i
sQrms
8000 3, 39x10
2
Escalar (frequ encia constante)
u
sQrms
e i
sQrms
800 8x10
3
Escalar (frequ encia constante)
i
sDrms
e i
sQrms
8000 1, 95x10
2
Escalar (frequ encia constante)
i
sDrms
e i
sQrms
800 1, 57x10
4
Escalar (frequ encia constante)
i
sDrms
e i
sQrms
8000 2x10
1
Escalar (frequ encia vari avel)
u
sDrms
, i
sDrms
, u
sQrms
e i
sQrms
480 1, 5x10
2
Escalar (frequ encia vari avel)
u
sDrms
, i
sDrms
, u
sQrms
e i
sQrms
480 1, 58x10
2
IFOC (frequ encia vari avel)
i
sy
, i
sy
(K1), i
sy
(K2), (K1) e (K2) 3250 1, 35x10
6
IFOC (frequ encia vari avel)
97
Tabela 6.2: Erros m edios relativos
Vari aveis Amostras EMR (%) Modelo
u
sQrms
e i
sQrms
8000 1, 93 Escalar (frequ encia constante)
u
sQrms
e i
sQrms
8000 2, 18 Escalar (frequ encia constante)
i
sDrms
e i
sQrms
8000 2, 01 Escalar (frequ encia constante)
i
sDrms
e i
sQrms
8000 0, 49 Escalar (frequ encia constante)
i
sDrms
e i
sQrms
8000 Muito elevado Escalar (frequ encia vari avel)
u
sDrms
, i
sDrms
, u
sQrms
e i
sQrms
6, 01 (13 rad/s)
8000 2, 87 (33 rad/s) Escalar (frequ encia vari avel)
4, 52 (47 rad/s)
u
sDrms
, i
sDrms
, u
sQrms
e i
sQrms
5000 3, 58 (222 rad/s) IFOC (frequ encia vari avel)
i
sy
, i
sy
(K1), i
sy
(K2), (K1) e (K2)
130000 2,88 (285 rad/s)
100000 2,88 (225 rad/s)
60000 5,2 (135 rad/s) IFOC (frequ encia vari avel)
40000 8,5 (65 rad/s)
6.9 Avaliac ao do impacto da variac ao de par ametros
Ap os apresentar os erros associados ` a estimac ao, nesta sec ao e realizada uma an alise com-
parativa da variac ao dos par ametros do MIT em relac ao ` a resposta do estimador. S ao impostas
variac oes da resist encia de rotor, indut ancia de magnetizac ao e resist encia de estator. Os resul-
tados s ao apresentados para a velocidade de 285 rad/s e 65 rad/s anteriormente consideradas.
6.9.1 Variac ao da indut ancia de magnetizac ao
Nesta sec ao s ao apresentados os resultados referentes ` a variac ao da indut ancia de magnetizac ao
da m aquina. Os valores de indut ancia foram variados entre 0.8pu a 1.2pu.
98
0 2 4 6 8 10 12 14
x 10
4
50
0
50
100
150
200
250
300
Amostras
Velocidades
V
e
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
0.8 pu
0.9 pu
1 pu
1.1 pu
1.2 pu
Figura 6.45: Respostas ` a variac oes de L
m
- Refer encia 285rad/s
0.8 0.85 0.9 0.95 1 1.05 1.1 1.15 1.2 1.25
x 10
5
284
284.5
285
285.5
286
286.5
287
287.5
288
Amostras
Velocidades
V
e
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
0.8 pu
0.9 pu
1 pu
1.1 pu
1.2 pu
Figura 6.46: Respostas ` a variac oes de L
m
(detalhe) - Refer encia 285rad/s
99
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 10
4
10
0
10
20
30
40
50
60
70
Amostras
Velocidades
V
e
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
0.8 pu
0.9 pu
1 pu
1.1 pu
1.2 pu
Figura 6.47: Respostas ` a variac oes de L
m
- Refer encia 65rad/s
2.2 2.4 2.6 2.8 3 3.2 3.4 3.6 3.8 4
x 10
4
64.5
65
65.5
66
66.5
67
67.5
68
Amostras
Velocidades
V
e
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
0.8 pu
0.9 pu
1 pu
1.1 pu
1.2 pu
Figura 6.48: Respostas ` a variac oes de L
m
(detalhe) - Refer encia 65rad/s
6.9.2 Variac ao da resist encia de rotor
Nesta sec ao s ao apresentados os resultados referentes ` a variac ao da resist encia de rotor da
m aquina. Os valores de resist encia foram variados entre de 0.8pu a 1.2pu.
100
0 2 4 6 8 10 12 14
x 10
4
50
0
50
100
150
200
250
300
Amostras
Velocidades
V
e
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
0.8 pu
0.9 pu
1 pu
1.1 pu
1.2 pu
Figura 6.49: Respostas ` a variac oes de R
r
- Refer encia 285rad/s
0.8 0.9 1 1.1 1.2 1.3
x 10
5
280
281
282
283
284
285
286
287
288
Amostras
Velocidades
V
e
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
0.8 pu
0.9 pu
1 pu
1.1 pu
1.2 pu
Figura 6.50: Respostas ` a variac oes de R
r
(detalhe) - Refer encia 285rad/s
101
0 1 2 3 4 5 6 7
x 10
4
10
0
10
20
30
40
50
60
70
Amostras
Velocidades
V
e
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
0.8 pu
0.9 pu
1 pu
1.1 pu
1.2 pu
Figura 6.51: Respostas ` a variac oes de R
r
- Refer encia 65rad/s
2 2.5 3 3.5 4 4.5 5 5.5
x 10
4
65
65.5
66
66.5
67
67.5
Amostras
Velocidades
V
e
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
0.8 pu
0.9 pu
1 pu
1.1 pu
1.2 pu
Figura 6.52: Respostas ` a variac oes de R
r
(detalhe) - Refer encia 65rad/s
6.9.3 Variac ao da resist encia de estator
Nesta sec ao s ao apresentados os resultados referentes ` a variac ao da resist encia de estator
da m aquina. Os valores de resist encia foram variados entre de 0.8pu a 1.2pu.
102
0 2 4 6 8 10 12 14
x 10
4
50
0
50
100
150
200
250
300
Amostras
Velocidades
V
e
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
0.8 pu
0.9 pu
1 pu
1.1 pu
1.2 pu
Figura 6.53: Respostas ` a variac oes de R
s
- Refer encia 285rad/s
8.8 9 9.2 9.4 9.6 9.8
x 10
4
283
284
285
286
287
288
289
Amostras
Velocidades
V
e
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
0.8 pu
0.9 pu
1 pu
1.1 pu
1.2 pu
Figura 6.54: Respostas ` a variac oes de R
s
(detalhe) - Refer encia 285rad/s
103
0 1 2 3 4 5 6 7
x 10
4
10
0
10
20
30
40
50
60
70
Amostras
Velocidades
V
e
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
0.8 pu
0.9 pu
1 pu
1.1 pu
1.2 pu
Figura 6.55: Respostas ` a variac oes de R
s
- Refer encia 65rad/s
2 2.1 2.2 2.3 2.4 2.5
x 10
4
66.2
66.4
66.6
66.8
67
67.2
67.4
67.6
67.8
Amostras
Velocidades
V
e
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
0.8 pu
0.9 pu
1 pu
1.1 pu
1.2 pu
Figura 6.56: Respostas ` a variac oes de R
s
(detalhe) - Refer encia 65rad/s
6.10 Acionamento sem sensor
Finalmente, ap os as avaliac oes anteriores, s ao apresentadas as respostas do acionamento
vetorial sem a utilizac ao de sensor para a realimentac ao da velocidade. O estimador neuro-
104
fuzzy, nesse acionamento, substitui o sensor na malha de realimentac ao de velocidade, al em
de ser utilizado para o c alculo da posic ao de rotor atrav es de integrac ao num erica. As guras
6.57, 6.58, 6.59 e 6.60, apresentam as respostas do acionamento sem sensores aos comandos de
velocidade de 285 rad/s, 225 rad/s, 135 rad/s e 65 rad/s, respectivamente.
0 2 4 6 8 10 12 14
x 10
4
50
0
50
100
150
200
250
300
Velocidades
Amostras
V
e
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
Velocidade Calculada
Velocidade Estimada
Figura 6.57: Resposta ao comando de velocidade de 285 rad/s
0 2 4 6 8 10 12
x 10
4
50
0
50
100
150
200
250
Velocidades
Amostras
V
e
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
Velocidade Calculada
Velocidade Estimada
Figura 6.58: Resposta ao comando de velocidade de 225 rad/s
105
0 1 2 3 4 5 6 7 8 9
x 10
4
20
0
20
40
60
80
100
120
140
Velocidades
Amostars
V
e
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
Velocidade Calculada
Velocidade Estimada
Figura 6.59: Resposta ao comando de velocidade de 135 rad/s
0 2 4 6 8 10 12
x 10
4
10
0
10
20
30
40
50
60
70
Amostras
Velocidades
V
e
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
Velocidade Calculada
Velocidade Estimada
Figura 6.60: Resposta ao comando de velocidade de 65 rad/s
O pr oximo captulo apresenta os resultados experimentais associados ` a metodologia pro-
posta para o desenvolvimento do estimador.
106
6.11 An alise dos resultados
Este captulo apresentou a base de desenvolvimento do estimador neuro-fuzzy de veloci-
dade. Para efeito de treinamento a faixa de freq u encia de operac ao do acionamento foi particio-
nada em partes iguais.
Para a gerac ao das func oes de pertin encia iniciais do estimador, foi utilizado o m etodo de
agrupamento subtrativo. Nesse m etodo, a densidade de cada ponto do conjunto de dados e
determinada, gerando ent ao, os centros de agrupamentos. A apresentac ao do conjunto de dados
e os centros de agrupamentos gerados para cada uma das vari aveis de entrada constitui-se em
mais uma contribuic ao deste trabalho.
A partir da an alise de agrupamentos, percebe-se, por exemplo, que para o conjunto de
dados das correntes utilizando frequ encia vari avel (6.16(a) e 6.16(b)), foi gerado um n umero
insuciente de agrupamentos. Isso justica a resposta ruim associada a essas vari aveis no acio-
namento com frequ encia vari avel. Na tentativa de se obter melhores respostas pode-se aumentar
o n umero de func oes de pertin encia para estas vari aveis. Conv em lembrar que o aumento do
n umero de func oes de pertin encia tamb em aumenta a carga computacional.
A apresentac ao dos conjuntos de treinamento confere uma maior interpretabilidade ao esti-
mador proposto neste trabalho, em contrapartida aos estimadores baseados em RNA. Ainda, e
possvel otimizar as func oes de pertin encia para cada uma das congurac oes do estimador. Essa
tarefa pode ser realizada atrav es da fus ao de func oes de pertin encia com forma e distribuic oes
muito similares (PAIVA; DOURADO, 2004). Como um exemplo, pode-se citar as pr oprias
guras 6.16(a) e 6.16(b) onde os agrupamentos 1 e 2 apresentados est ao bastante pr oximos.
As func oes de pertin encia associadas, apresentadas na gura 6.12 demonstram exatamente essa
situac ao. As duas func oes de pertin encia mais ` a esquerda poderiam ser fundidas em uma unica.
A exibilidade de adaptac ao do estimador neuro-fuzzy conforme apresentado neste captulo
e uma vantagem sobre os sistemas baseados em RNA, sem interpretac ao fsica.
O estimador se mostrou bastante robusto ` as variac oes de resist encia estat orica e indut ancia
de magnetizac ao. Por outro lado, a resposta transit oria da estimativa da rotac ao e afetada pela
variac oes na resist encia do rotor da m aquina. Esse impacto tamb em e observado na resposta real
de velocidade do sistema. Nesse sentido, adaptac oes da resist encia de rotor para o acionamento
se fazem necess arias, conforme comenta (ROSA, 2005).
107
CAP
ITULO 7
Resultados experimentais
7.1 Acionamento Escalar
A validac ao experimental do estimador ANFIS de velocidade seguiu a mesma metodologia
de sua validac ao te orica. Primeiramente, um acionamento escalar mantendo a raz ao entre a
tens ao e a frequ encia de estator constante foi implementado. Foram impostas frequ encias de
acionamento de 10 a 60Hz, com essa faixa igualmente dividida em espacamentos de cinco Hertz
de frequ encia. O treinamento do estimador foi efetuado seguindo metodologia desenvolvida no
captulo 6, por em foram utilizados somente dados experimentais para os valores ecazes de
tens ao e corrente de estator no referencial estacion ario.
O conjunto de dados de treinamento foi composto por cinco mil e quinhentas amostras
e a validac ao se deu com a metade de amostras do conjunto de treinamento. O perodo de
amostragem utilizado no acionamento escalar, desta sec ao, e no vetorial, das sec oes seguintes,
foi de 200s. Esse perodo e maior do que o utilizado na simulac ao por quest oes de limitac ao do
hardware utilizado. Ajustou-se o menor perodo possvel para o sistema de aquisic ao operando
com o pacote de tempo real do Matlab. Nesta condic ao de treinamento, a tens ao aplicada ao
estator pelo conversor e modulada em PWM e portanto n ao senoidal.
As guras 7.1, 7.2 e 7.3 apresentam as func oes de pertin encia para cada uma das entradas
do estimador e os dados de treinamento e validac ao confrontados com a sada estimada.
108
0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1
IsDRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1
IsQRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1
VsDRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1
VsQRMS
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Figura 7.1: Func oes de Pertin encia ap os o treinamento
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
0
0.2
0.4
0.6
0.8
1
Amostars
S
a
d
a
Dados de Treinamento x Sada ANFIS
Dados de Treinamento
Sada ANFIS
Figura 7.2: Conjunto de dados de treinamento
109
0 500 1000 1500 2000 2500
0
0.2
0.4
0.6
0.8
1
Amostras
S
a
d
a
Dados de Validao x Sada ANFIS
Dados de Validao
Sada ANFIS
Figura 7.3: Conjunto de dados de validac ao
Ap os o treinamento do estimador, se fez a validac ao experimental do sistema. As guras
7.4, 7.5, 7.6, 7.7 e 7.8 apresentam a resposta do estimador ANFIS para as frequ encias impostas
de estator de 60 Hz, 58Hz, 47Hz, 33Hz e 11Hz, respectivamente. As quatro ultimas frequ encias
n ao faziam parte do conjunto de treinamento e apresentam a capacidade de generalizac ao do
estimador.
Figura 7.4: Resposta experimental para sessenta Hertz
110
Figura 7.5: Resposta experimental para cinquenta e oito Hertz
Figura 7.6: Resposta experimental para quarenta e sete Hertz
111
Figura 7.7: Resposta experimental para trinta e tr es Hertz
Figura 7.8: Resposta experimental para onze Hertz
7.2 Acionamento Vetorial
Ap os a validac ao do estimador proposto para o acionamento escalar simplicado, implementou-
se o acionamento vetorial com orientac ao no referencial de uxo magn etico de entreferro,
112
conforme descrito no captulo tr es. Antes do desenvolvimento do estimador, alguns testes fo-
ram realizados no sentido de validar o acionamento. No primeiro, confrontou-se a resposta de
simulac ao com a resposta experimental a um comando de velocidade de 350 rad/s. O resultado
e apresentado na gura 7.9 a seguir. Outros comandos de velocidade (n ao apresentados) fo-
ram impostos ao acionamento e a resposta confrontada com os valores simulados foram sempre
satisfat orias.
A gura 7.10 apresenta a resposta de corrente dos eixos direto e quadratura do acionamento
e gura 7.11 a tens ao de linha aplicada ao motor.
0 0.5 1 1.5 2 2.5 3 3.5
50
0
50
100
150
200
250
300
350
400
Velocidades (Experimental x Modelo)
tempo(s)
V
e
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
Experimental
Simulink
Figura 7.9: Resposta de simulac ao e experimental a um comando de 350 rad/s
6 4 2 0 2 4 6
6
4
2
0
2
4
6
Correntes do eixo direto e quadratura
IsD
I
s
Q
Figura 7.10: Correntes do eixo direto e quadratura
113
Figura 7.11: Tens ao de linha do estator
As guras 7.12, 7.13, 7.14 e 7.15 apresentam, respectivamente, as respostas de velocidade
a comandos de 350 rad/s, 100 rad/s e 50 rad/s e, nalmente, a corrente de refer encia do aciona-
mento e a resposta de corrente no motor.
Figura 7.12: Resposta experimental para 300 rad/s
114
Figura 7.13: Resposta experimental para 100 rad/s
Figura 7.14: Resposta experimental para 50 rad/s
115
IL
IL
*
Figura 7.15: Corrente de refer encia I
L
e resposta de corrente I
L
As respostas a seguir referem-se ao treinamento utilizando a corrente em quadratura i
sy
gerada pelo pr oprio acionamento, com dois atrasos de amostragem. Al em disso, h a recorr encia
de frequ encia angular na rede. Foram utilizadas, dessa forma, cinco entradas para o treinamento
do estimador: i
sy
(K), i
sy
(K 1), i
sy
(K 2), (K 1) e (K 2). A gura 7.16 apresenta as
func oes de pertin encias associadas a treinamento do estimador ANFIS.
4 2 0 2 4
0
0.5
1
Isy
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
4 2 0 2 4
0
0.5
1
Isy(K1)
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
4 2 0 2 4
0
0.5
1
Isy(K2)
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
0 0.2 0.4 0.6 0.8
0
0.5
1
W(K1)
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
0 0.2 0.4 0.6 0.8
0
0.5
1
W(K2)
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Figura 7.16: Func oes de pertin encia ap os o treinamento
116
Ap os o treinamento, vericou-se a resposta do estimador ao conjunto de treinamento e ao
conjunto de validac ao. As respostas encontram-se nas guras 7.17 e 7.18 a seguir. O erro m edio
quadr atico associado ao treinamento ap os vinte epocas foi de 6, 4x10
5
.
0 1000 2000 3000 4000 5000 6000 7000
0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Amostras
A
m
p
l
i
t
u
d
e
s
Dados de Treinamento X Sada ANFIS
Dados de Treinamento
Sada ANFIS
Figura 7.17: Conjunto de Treinamento
0 500 1000 1500 2000 2500 3000 3500
0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Dados de Validao X Sada ANFIS
Amostras
A
m
p
l
i
t
u
d
e
s
Dados de Validao
Sada ANFIS
Figura 7.18: Conjunto de Validac ao
117
Antes da validac ao do estimador para frequ encias que n ao faziam parte do treinamento,
alguns testes foram realizados para frequ encias especcas. As guras 7.19, 7.20, 7.21 e 7.22
apresentam as respostas para as velocidades de 20 rad/s, 300 rad/s, 50 rad/s e 150 rad/s, respec-
tivamente.
Figura 7.19: Resposta do estimador para 20 rad/s
Figura 7.20: Resposta do estimador para 300 rad/s
118
Figura 7.21: Resposta do estimador para 50 rad/s
Figura 7.22: Resposta do estimador para 150 rad/s
119
Utilizando-se o particionamento em frequ encia, obtiveram-se os resultados para os coman-
dos de 35 rad/s, 65 rad/s, 135 rad/s, 225 rad/s e 285 rad/s, apresentados nas guras 7.23, 7.24,
7.25, 7.26 e 7.27.
Figura 7.23: Resposta de generalizac ao do estimador para 35 rad/s
Figura 7.24: Resposta de generalizac ao do estimador para 65 rad/s
120
Figura 7.25: Resposta de generalizac ao do estimador para 135 rad/s
Figura 7.26: Resposta de generalizac ao do estimador para 225rad/s
121
Figura 7.27: Resposta de generalizac ao do estimador para 285rad/s
Com um conjunto de treinamento reduzido, os mesmos testes foram realizados. As guras
7.28, 7.29 e 7.30 apresentamas func oes de pertin encia e os conjuntos de treinamento e validac ao
utilizados, respectivamente.
4 2 0 2 4
0
0.5
1
Isy(K)
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
4 2 0 2 4
0
0.5
1
Isy(K1)
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
4 2 0 2 4
0
0.5
1
Isy(K2)
D
e
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
0 0.2 0.4 0.6 0.8
0
0.5
1
w(K1)
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
0 0.2 0.4 0.6 0.8
0
0.5
1
w(K2)
G
r
a
u
d
e
P
e
r
t
i
n
n
c
i
a
Figura 7.28: Func oes de pertin encia ap os o treinamento
122
0 100 200 300 400 500 600 700
0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Amostras
A
m
p
l
i
t
u
d
e
s
Dados de Treinamento x Sada ANFIS
Dados de Treinamento
Sada ANFIS
Figura 7.29: Conjunto de Treinamento
0 50 100 150 200 250 300 350
0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Amostras
A
m
p
l
i
t
u
d
e
s
Dados de Validao x Sada ANFIS
Dados de Validao
Sada ANFIS
Figura 7.30: Conjunto de Validac ao
123
Os resultados de generalizac ao do estimador com conjunto reduzido se encontram nas gu-
ras 7.31, 7.32, 7.33, 7.34 e 7.35.
Figura 7.31: Resposta de generalizac ao do estimador para 35rad/s
Figura 7.32: Resposta de generalizac ao do estimador para 65rad/s
124
Figura 7.33: Resposta de generalizac ao do estimador para 135rad/s
Figura 7.34: Resposta de generalizac ao do estimador para 225rad/s
125
Figura 7.35: Resposta de generalizac ao do estimador para 285rad/s
7.3 An alise dos resultados
Os resultados experimentais registrados com o estimador est ao em conformidade com os
resultados obtidos por simulac ao. A metodologia proposta para o treinamento do estimador se
mostrou ecaz, tanto para o acionamento escalar, como para o vetorial.
Um fato relevante e que o estimador foi treinado com dados puramente experimentais,
corrompidos por rudos de medic ao conforme mostra a gura 7.2. Os pontos associados ao rudo
de medida t em baixa densidade na gerac ao de agrupamentos associado ao m etodo subtrativo.
Esse resultado e de extrema import ancia, j a que rudos est ao sempre presentes nas vari aveis
medidas, e a possibilidade de treinamento com dados experimentais aumenta a exibilidade de
projeto do estimador.
Em particular, pode-se citar o trabalho de (GOEDTEL, 2007), em que uma RNA foi trei-
nada atrav es de simulac ao computacional e falhou na vericac ao experimental. A soluc ao en-
contrada pelo autor foi a inserc ao de dados experimentais no conjunto de treinamento computa-
cional. A melhora nos resultados de estimac ao foram bastante signicativas. Naquele trabalho,
rudos associados ` as medic oes impediram que boas respostas fossem obtidas a partir da RNA
com treinamento proveniente de dados puramente experimentais.
126
Em relac ao ao acionamento vetorial, os resultados tamb em foram satisfat orios com velo-
cidades a partir de 65 rad/s. Em velocidades muito baixas, 20 rad/s por exemplo, as resposta
de estimac ao n ao foram adequadas. Nessas velocidades, os sinais de corrente associados ao
treinamento assumem valores extremamente reduzidos (foi utilizado um motor de apenas 200
W), prejudicando os resultados de estimac ao.
Apesar das respostas de estimac ao em baixas velocidades n ao serem adequadas, essa n ao
adequac ao est a associada ` a resposta de regime estacion ario.
E possvel observar na gura 7.10
que h a uma grande variac ao nos valores de corrente de regime. Isso se deve ao fato de o
regulador de corrente por banda de histerese operar com uma largura de banda xa. Essas
variac oes de corrente podem inuenciar na resposta do estimador em regime estacion ario.
127
CAP
ITULO 8
Conclus oes
Este trabalho apresentou o processo de desenvolvimento de um estimador neuro-fuzzy para
a estimac ao de velocidade mec anica de um MIT. Um eciente m etodo foi proposto, utilizando
valores de correntes e tens oes de estator do motor.
Para tal desenvolvimento, o projeto do estimador foi dividido em duas partes. Na primeira,
uma estrat egia escalar Volts por Hertz constante foi considerada devido a sua simplicidade
em relac ao ao controle vetorial do MIT. Nessa etapa, a avaliac ao das vari aveis de entrada do
estimador foi realizada e, mais ainda, foi possvel validar o m etodo de treinamento proposto.
Os valores ecazes das tens oes e correntes do estator mostraram-se ecientes como vari aveis
de entrada do estimador.
Na sequ encia, um modelo de acionamento FOC indireto foi implementado para comandar
o MIT. A escolha de um referencial n ao usual, o de uxo magn etico de entreferro, em que
o sistema de equacionamento e mais complexo e n ao linear, caracteriza-se como mais uma
contribuic ao deste trabalho, pois exp oe o estimador ` a n ao linearidade de operac ao do motor.
A boa resposta do estimador nesse referencial aumenta as possibilidades de sucesso da t ecnica
proposta neste trabalho em outras aplicac oes.
Para o sucesso do treinamento do estimador no modelo vetorial, foi utilizado um sistema
neuro-fuzzy com recorr encia. Ainda, os valores ecazes de tens ao e corrente se mostraram
inecientes nesse acionamento. Utilizou-se, ent ao, como entrada do estimador, a componente
128
da corrente de estator respons avel pela gerac ao de torque. As respostas de estimac ao foram,
ent ao, ecientes para uma ampla faixa de velocidades.
Para a gerac ao das func oes de pertin encia iniciais do estimador, foi utilizado o m etodo
de agrupamento subtrativo. Para o sucesso deste m etodo de treinamento, os dados associados
` as vari aveis de entrada devem ser previamente normalizados. O fato de se trabalhar com dados
normalizados garante que o m etodo de treinamento proposto independe da pot encia da m aquina.
Dessa maneira, houve sucesso no procedimento experimental, mesmo com uma m aquina de
pot encia diferente daquela utilizada na simulac ao.
Ainda relacionado ao m etodo de agrupamento subtrativo, observa-se que o sistema se torna
relativamente robusto aos sinais corrompidos por rudos de medic ao. Essa caracterstica permi-
tiu que a metodologia te orica para o treinamento, desenvolvida de forma computacional, fosse
implementada diretamente de maneira experimental com sucesso.
O m etodo de treinamento proposto para o estimador apresentou boa capacidade de gene-
ralizac ao para operac ao em velocidades que n ao pertenciam ao conjunto de treinamento. Esse
resultado e fundamental para a validac ao do estimador e, conrma, que o particionamento do
conjunto de dados em frequ encias especcas de operac ao da m aquina e uma alternativa vi avel
no sentido de padronizar o conjunto de treinamento em sistemas dessa natureza.
O estimador se mostrou, teoricamente, robusto ` as variac oes param etricas da m aquina. As
maiores diferencas de resposta est ao associadas ` a resist encia de rotor. Dessa forma, adaptac oes
nessa vari avel se fazem necess arias.
As principais diculdades associadas a este trabalho est ao relacionadas ao treinamento do
estimador no que diz respeito a an alise de vari aveis de entrada e escolha dos melhores conjun-
tos de dados de treinamento. O desenvolvimento do arranjo experimental, considerando a
integrac ao entre software e hardware, tamb em caracterizou-se como uma etapa de grande di-
culdade a ser vencida.
8.1 Trabalho futuro
A partir dos resultados apresentados neste trabalho, se sugere como trabalho futuro:
Investigar o desempenho do estimador em outros referenciais de orientac ao de uxo
magn etico: estator e rotor;
Fus ao das func oes de pertin encia do estimador
129
Implementac ao do acionamento com o estimador neuro-fuzzy em DSP;
Melhoria da resposta do estimador em baixas velocidades;
Utilizac ao do estimador proposto em sistemas baseados em modelo de refer encia adapta-
tivos;
Vericac ao da robustez do estimador as variac oes param etricas do motor e perda de sin-
tonia do acionamento de forma experimental;
Vericac ao experimental dos efeitos de operac ao do motor sob carga.
130
Refer encias
AHN, T. et al. Design of neuro-fuzzy controller on dsp for real-time control of induction
motors. Joint 9th IFSA World Congress and 20th NAFIPS International Conference, v. 5, p.
30383043, July 2001.
AWARE, M. V.; KOTHARI, A. G.; SHOUBE, S. O. Application of adaptive neuro-fuzzy
controller (ans) for voltage source inverter fed induction motor drive. Proceedings of The
Third International Power Electronics and Motion Control Conference, IPEMC 2000, v. 2, p.
935939, August 2000.
AYYUB, M. Ans based soft-starting and speed control of ac voltage controller fed induction
motor. Power India Conference, 2006 IEEE, p. 5, 2006.
BA-RAZZOUK, A. et al. Field-oriented control of induction motors using neural-network
decouplers. IEEE Transactions on Power Electronics, v. 12, n. 4, p. 752763, July 1997.
BARADA, S.; SINGH, H. Generating optimal adaptive fuzzy-neural models of dynamical
systems with applications to control. IEEE Transactions on Systems, Man and Cybernetics -
part C: applications and reviews, v. 28, n. 3, p. 371391, August 1998.
BARUT, M.; BOGOSYAN, S.; GOKASAN, M. Speed-sensorless estimation for induction
motors using extended kalman lters. IEEE Transactions on Industrial Electronics, v. 54, n. 1,
p. 300, February 2007.
BLASCKE, F. The principle of eld orientation as applied to the new transvektor closed-loop
control system for rotating eld machines. Siemens Review, n. 5, p. 217220, 1972.
BOLDEA, I. Control issues in adjustable speed drives. IEEE Industrial Electronics Magazine,
v. 2, n. 3, p. 3250, september 2008.
BOLDEA, I.; NASAR, S. Electric Drives. 2. ed. [S.l.]: Taylor and Francis, 2006.
BOSE, B. Power electronics and motor drives recent progress and perspective. IEEE
Transactions on Industrial Electronics, v. 56, n. 2, p. 581 588, feb. 2009. ISSN 0278-0046.
131
BOSE, B. K. Power Electronics and Variable Frequency Drives - Technology and Applications.
[S.l.]: IEEE Press, 1997.
BOSE, B. K. Neural network applications in power electronics and motor drives - an
introduction and perspective. IEEE Transactions on Industrial Electronics, v. 54, n. 1, p. 14
33, feb. 2007. ISSN 0278-0046.
BOSE, B. K.; PATEL, N. R.; RAJASHEKARA, K. A neuro-fuzzy-based on-line efciency
optimization control of a stator ux-oriented direct vector-controlled induction motor drive.
IEEE Transactions on Industrial Electronics, v. 44, n. 2, April 1997.
BOUSSAK, M.; JARRAY, K. A high-performance sensorless indirect stator ux orientation
control of induction motor drive. IEEE Transactions on Industrial Electronics, v. 53, n. 1, p.
4149, February 2006.
BUJA, G.; KAZMIERKOWSKI, M. Direct torque control of pwm inverter-fed ac motors - a
survey. IEEE Transactions on Industrial Electronics, v. 51, n. 4, p. 744757, August 2004.
BUJA, G.; TODESCO, F. A high-performance sensorless indirect stator ux orientation control
of induction motor drive. IEEE Transactions on iIndustrial Electronics, v. 41, n. 6, December
1994.
CASADEI, D. et al. Foc and dtc: two viable schemes for induction motors torque control.
IEEE Transactions on Power Electronics, v. 17, n. 5, p. 779 787, sep 2002. ISSN 0885-8993.
CHEN, Y. C.; TENG, C. A model reference control structure using a fuzzy neural network.
Fuzzy Sets and Systems, v. 73, p. 291312, 1995.
CHEOK, A. D.; WANG, Z. Fuzzy logic rotor position estimation based switched reluctance
motor dsp drive with accuracy enhancement. IEEE Transactions on Power Electronics, v. 20,
n. 4, p. 908921, July 2005.
CHIU, S. L. Fuzzy model identication based on cluster estimation. Journal of Intelligent and
Fuzzy Sytems, v. 2, n. 3, p. 267278, 1994.
CHIU, S. L. Method and software for extracting fuzzy classication rules by subtractive
clustering. Biennial Conference of the North American Fuzzy Information Processing Society,
NAFIPS., p. 461465, June 1996.
CHY, M.; UDDIN, M. Development and implementation of a new adaptive intelligent speed
controller for ipmsm drive. IEEE Transactions on Industry Applications, v. 3, p. 11061115,
May-june 2009.
CIRRINCIONE, M.; PUCCI, M. An mras-based sensorless highperformance induction motor
drive with a predictive adaptive model. IEEE Transactions on Industrial Electronics, v. 52,
n. 2, p. 532551, January 2005.
CIRRINCIONE, M.; PUCCI, M. An adaptive speed observer based on a new total least-squares
neuron for induction machine drives. IEEE Transactions on Industry Applications, v. 42, n. 1,
p. 89104, January 2006.
132
CRUZ, P. P.; PAREDES, J. P. S. A novel speed sensorless direct torque controlled induction
motor drive. IEEE International Electric Machines and Drives Conference, IEMDC 2003, v. 2,
p. 971975, June 2003.
CUC
`
E, A. et al. System identication through neuro-fuzzy methodologies. International
Symposium on Neuro-Fuzzy Systems, AT96., p. 129138, August 1996.
DERDIYOK, A. Speed-sensorless control of induction motor using a continuous control
approach of sliding-mode and ux observer. IEEE Transactions on Industrial Electronics,
v. 52, n. 4, p. 11701176, August 2005.
DIAS, C. Proposta de um novo m etodo para a detecc ao de barras rompidas em motores de
induc ao com rotor em gaiola. Tese (Doutorado) Universidade de S ao Paulo, 2006.
D.MIHAI; R.MIHAI. Neuro-fuzzy versus hysteresis current controller for a vector control
based electrical drive system. 11
th
International Conference on Intelligent Engineering
Systems, INES 2007, p. 241246, June 2007.
EDELBAHER, G.; JEZERNIK, K.; URLEP, E. Low-speed sensorless control of induction
machine. IEEE Transactions on Industry Applications, v. 53, n. 1, p. 120 129, February 2006.
FINCH, J.; GIAOURIS, D. Controlled ac electrical drives. IEEE Transactions on Industrial
Electronics, v. 55, n. 2, p. 481 491, feb. 2008. ISSN 0278-0046.
FUKUDA, T.; SHIBATA, T. Theory and applications of neural networks for industrial control
systems. IEEE Transactions on Industry Applications, v. 39, n. 6, December 1992.
GADOUE, S.; GIAOURIS, D.; FINCH, J. Sensorless control of induction motor drives at very
low and zero speeds using neural network ux observers. IEEE Transactions on Industrial
Electronics, v. 56, n. 8, p. 3029 3039, aug. 2009. ISSN 0278-0046.
GOEDTEL, A. Estimador neural de velocidade para motor de induc ao trif asico. Tese
(Doutorado) Universidade de S ao Paulo, 2007.
GRABOWISK, P. Z. et al. A simple direct-torque neuro-fuzzy control of pwm-inverter-fed
induction motor drive. IEEE Transactions on Industrial Electronics, v. 47, n. 4, p. 863870,
August 2000.
GUPTA, R.; KUMAR, R.; SURJUSE, R. An adaptive neuro-fuzzy based speed sensorless
induction motor drives. In: World Congress on Nature Biologically Inspired Computing, 2009.
NaBIC 2009. [S.l.: s.n.], 2009. p. 397 402.
GUPTA, R. A.; KUMAR, R.; SURJUSE, R. S. Ans based intelligent control of vector
controlled induction motor drive. 2nd International Conference on Emerging Trends in
Engineering and Technology (ICETET), 2009, p. 674680, December 2009.
HENRIQUES, L. O. A. P. et al. Development and implementation of a neuro fuzzy technique
for position sensor elimination in a srm. IEEE International Symposium on Industrial
Electronics, v. 1, p. 465470, May 2004.
HEREDIA, J. R.; HIDALGO, F. P.; PAZ, J. L. D. Sensorless control of induction motors
by articial neural networks. IEEE Transactions on Industrial Electronics, v. 48, n. 5, p.
10381040, October 2001.
133
HOLTZ, J. Methods for speed sensorless control of ac drives. IEEE PCC, p. 415420, 1993.
HOLTZ, J. Sensorless position control of induction motors-an emerging technology. IEEE
Transactions on Industrial Electronics, v. 45, n. 6, p. 840 851, dec 1998. ISSN 0278-0046.
HOLTZ, J. Sensorless control of induction machines - with or without signal injection? IEEE
Transactions on Industrial Electronics, v. 53, n. 1, p. 7 30, feb. 2005. ISSN 0278-0046.
HOU, Z.; SHEN, Q.; LI, H. Nonlinear system identication based on ans. IEEE Internaional
Conference on Neural Networks and Signal Processing, p. 510512, December 2003.
JANG, J. S. R. Fuzzy controller design without domain experts. IEEE International Conference
on Fuzzy Systems, p. 289296, March 1992.
JANG, J. S. R. Ans : Adaptive-network-based fuzzy inference system. IEEE Transactions on
Systems, Man and Cybernetics, v. 23, n. 3, p. 665685, May-June 1993.
JANG, J. S. R. Input selection for ans learning. Proceedings of the Fifth IEEE International
Conference on Fuzzy Systems, v. 2, p. 14931499, September 1996.
JANG, T. S. R.; SUN, C. T.; MIZUTANI, E. Neuro-Fuzzy and Soft Computing - A
computational approach to learning and machine intelligence. [S.l.]: Prentice Hall, 1997.
KANMACHI, T.; TAKAHASHI, I. Sensorless speed control of an induction motor. IEEE
Industry Applications Magazine, p. 2227, 1995.
KARANAYIL, B.; MUHAMMED, F.; GRANTHAN, C. Stator and rotor resistance observers
for induction motor drive using fuzzy logic and articial neural networks. IEEE Transactions
on Energy Conversion, v. 40, n. 4, p. 771780, 2005.
KASHIF, A. R.; SAQIB, M. A. Soft starting of an induction motor using adaptive neuro fuzzy
inference system. International Conference on Electrical Engineering ICEE 2007, p. 15,
April 2007.
KASHIF, A. R.; SAQIB, M. A. Soft starting of induction motors using neuro fuzzy and soft
computing. Second International Conference on Electrical Engineering ICEE 2008, p. 17,
March 2008.
KASMIERKOWSKI, M. P.; MALESANI, L. Current control techniques for three-phase
voltage-source pwm converters: A survey. IEEE Transactions on Industrial Electronics, v. 45,
n. 5, p. 691702, October 1998.
KEYHANI, A.; PROCA, A.; MILLER, J. Sensorless Control of Induction Motors. [S.l.]: IEEE
Pres, 2001.
KIM, S. H. et al. Speed-sensorless vector control of an induction motor using neural network
speed estimation. IEEE Transactions on Industrial Electronics, v. 48, n. 3, p. 609614, June
2001.
KIM, Y. R.; SUL, K.; PARK, M. H. Speed sensorless vector control of induction motor using
extended kalman lter. IEEE Transactions on Industry Applications, v. 30, n. 5, September
1994.
134
KO, J.-S.; CHOI, J.-S.; CHUNG, D.-H. Hybrid articial intelligent control for speed control
of induction motor. International Joint Conference SICE-ICASE, 2006., p. 678683, October
2006.
KWON, Y. A.; KIM, S. H. A new scheme for speed-sensorless control of induction motor.
IEEE Transactions on Industrial Electronics, v. 51, n. 3, p. 545550, June 2004.
LAI, Y. S.; CHEN, J. H. A new approach direct torque control of induction motor drives
for constant inverter switching frequency and torque ripple reduction. IEEE Transactions on
Energy Conversion, v. 16, n. 3, p. 220227, September 2001.
LASCU, C.; BOLDEA, I.; BLAABJERG, F. Comparative study of adaptive and inherently
sensorless observers for variable-speed induction-motor drives. IEEE Transactions on
Industrial Electronics, v. 53, n. 1, p. 57 65, feb. 2005. ISSN 0278-0046.
LASCU, C.; BOLDEA, I.; BLAABJERG, F. Very-low-speed variable-structure control of
sensorless induction machine drives without signal injection. IEEE Transactions on Industrial
Electronics, v. 41, n. 2, p. 591598, March-April 2005.
LEE, K.-B.; BAE, C. H.; BLAABJERG, F. Disturbance observer that uses the radial basis
function networks for low speed control of electric machine. Proceedings of IEE Control
Theory Application, v. 152, n. 2, p. 118125, March 2005.
LEE, K.-B.; BLAABJERG, F. Performance improvement of sensorless vector control for
induction motor drives fed by matrix converter using nonlinear model and disturbance observer.
Proceedings of IEEE Power Electronics Specialists Conference, p. 13411347, March 2004.
LEE, K. B. et al. Improvement of lowspeed operation performances of dtc for 3-level
inverter-fed induction motors. IEEE Transactions on Industrial Electronics, v. 48, n. 5, p.
10061014, October 2001.
LIAW, C. M.; WANG, J. B.; CHANG, Y. C. A fuzzy adapted eld oriented mechanism for
induction motor drive. IEEE Transactions on Energy Conversion, v. 11, n. 1, March 1996.
LIN, F.; SHEN, P. Robust fuzzy neural network sliding-mode control for two-axis motion
control system. IEEE Transactions on Industrial Electronics, v. 53, n. 4, August 2006.
LIN, F.; WAI, R. Adaptive fuzzy-neural-network control for induction spindle motor drive.
IEEE Transactions on Energy Conversion, v. 17, n. 4, December 2002.
L
OPEZ, J. C. et al. Novel fuzzy adaptive sensorless induction motor drive. IEEE Transactions
on Industrial Electronics, v. 53, n. 4, p. 11701178, June 2006.
LORENZ, R.; LIPO, T.; NOVOTNY, D. Motion control with induction motors. Proceedings of
the IEEE, v. 82, n. 8, p. 1215 1240, aug 1994. ISSN 0018-9219.
MAMDANI, E. H. Application of fuzzy logic to approximate reasoning using linguistic
synthesis. IEEE Transactions on Computers, v. 12, p. 11821191, December 1977.
MARINO, P.; MILANO, M.; VASCA, F. Linear quadratic state feedback and robust neural
network estimator for eld-oriented-controlled induction motors. IEEE Transactions on
Industrial Electronics, v. 46, n. 1, February 1999.
135
MELFI, M. J.; EVON, S.; MCELVEEN, R. Induction versus permanent magnet motors. IEEE
Industry Applications Magazine, v. 15, n. 6, p. 2835, November-december 2009.
MITRONIKAS, E. D.; SAFACAS, A. N. An improved sensorless vector-control method for an
induction motor drive. IEEE Transactions on Industrial Electronics, v. 52, n. 6, p. 16601668,
December 2005.
MOHAMADIAN, M. et al. A novel neural network controller and its efcient dsp
implementation for vector-controlled induction motor drives. IEEE Transactions on Industrial
Electronics, v. 39, n. 6, November 2003.
NEJJARI, H.; BENBOUZID, E. H. Application of fuzzy logic to induction motors condition
monitoring. IEEE Power Engineering Review, June 1999.
NOROOZI-VARCHESHME, N.; RANJBAR-NOIEY, A.; KARIMI-DAVIJANI, H. Sensorless
indirect eld-oriented control of induction motor using intelligent pi controller. 43rd
International Universities Power Engineering Conference, UPEC 2008, p. 15, September
2008.
OGASARAWA, S.; AKAGI, H.; NABAE, A. The generalized theory of indirect vector
control for ac machines. IEEE Transactions on Industry Applications, v. 24, n. 3, p. 470478,
May-June 1988.
ORLOWSKA-KOWALSKA, T.; DYBKOWSKI, M. Stator-current-based mras estimator
for a wide range speed-sensorless induction-motor drive. IEEE Transactions on Industrial
Electronics, v. 57, n. 4, p. 1296 1308, april 2010. ISSN 0278-0046.
ORLOWSKA-KOWALSKA, T.; DYBKOWSKI, M.; SZABAT, K. Adaptive neuro-fuzzy
control of the sensorless induction motor drive system. 12
th
International Power Electronics
and Motion Control Conference, v. 30, p. 18361841, 2006.
ORLOWSKA-KOWALSKA, T.; DYBKOWSKI, M.; SZABAT, K. Adaptive sliding-mode
neuro-fuzzy control of the two-mass induction motor drive without mechanical sensors. IEEE
Transactions on Industrial Electronics, v. 57, n. 2, p. 553 564, feb. 2010. ISSN 0278-0046.
PAIVA, R. P.; DOURADO, A. Interpretability and learning in neuro-fuzzy systems. Fuzzy Sets
and Systems, v. 147, p. 1738, 2004.
PARAMASIVAM, S. et al. Indirect rotor position estimation of switched reluctance motor
using ans. The Fifth International Conference on Power Electronics and Drive Systems,
PEDS 2003, v. 2, p. 921926, November 2003.
PARAMASIVAM, S. et al. Real-time verication of ai based rotor position estimation
techniques for a 6/4 pole switched reluctance motor drive. IEEE Transactions on Magnetics,
v. 43, n. 7, p. 32093222, July 2007.
PURWANTO, E.; ARIFIN, S.; BIAN-SIOE, S. Application of adaptive neuro fuzzy inference
system on the development of the observer for speed sensor less induction motor. Proceedings
of IEEE Region 10 International Conference on Electrical and Electronic Technology,
TENCON, v. 1, p. 409414, August 2001.
136
PURWANTO, E. et al. The development of speed sensor observer for induction motor by using
adaptive neuro fuzzy with back propagation learning method. 8
th
International Conference on
Properties and applications of Dielectric Materials, 2006, p. 787792, June 2006.
RAJAJI, L.; KUMAR, C. Adaptive neuro fuzzy based soft starting of voltage-controlled
induction motor drive. IEEE Southeastcon, 2008., p. 448 453, April 2008.
RAJAJI, L.; KUMAR, C. Adaptive neuro fuzzy inference systems into squirrel cage induction
motor drive: Modeling, control and estimation. 5
th
International Conference on Electrical and
Computer Engineering, ICECE 2008, p. 162169, December 2008.
ROBYNS, B. et al. A fuzzy-logic-based multimodel eld orientation in an indirect foc of an
induction motor. IEEE Transactions on Industrial Electronics, v. 47, n. 2, April 2000.
ROBYNS, B.; BUYSE, H.; LABRIQUE, F. Fuzzy logic based eld orientation in an indirect
foc strategy of an induction actuator. Mathematics and Computational Simulation, v. 46, p.
265274, 1998.
ROSA, P. C. Redes Neurais aplicadas ao controle vetorial de m aquinas de induc ao. Tese
(Doutorado) Universidade de S ao Paulo, 2005.
SHIMURA, S. Acionamento de Motor Assncrono Incorporando Novo Estimador de
Par ametros Utilizando L ogica Difusa. Tese (Doutorado) Universidade de S ao Paulo, 1999.
SHIN, Y. C.; XU, C. Intelligent Systems - Modeling, Optimization and Control. [S.l.]: CRC
Press, 2009.
STRONACH, A.; VAS, P. Design, dsp implementation, and performance of articial-
intelligence-based speed estimators for electromechanical drives. IEE Proceedings - Control
Theory and Applications, v. 145, n. 2, p. 197 203, mar 1998. ISSN 1350-2379.
SUGENO, M.; KANG, G. T. Structure identication of fuzzy model. Fuzzy Sets and Systems,
n. 28, p. 1533, 1988.
TOLIYAT, H. A.; LEVI, E.; RAINA, M. A review of rfo induction motor parameter estimation
techniques. IEEE Transactions on Energy Conversion, v. 18, n. 2, June 2003.
UDDIN, M. N.; HUANG, Z. R.; CHY, M. M. I. A simplied self-tuned neuro-fuzzy controller
based speed control of an induction motor drive. IEEE Power Engineering Society General
Meeting, p. 18, June 2007.
UDDIN, M. N.; RADWAN, T. S.; RAHMAN, M. A. Performances of fuzzy-logic-based
indirect vector control for induction motor drive. IEEE Transactions on Industry Applications,
v. 38, n. 5, p. 12191225, September-October 2002.
UDDIN, M. N.; WEN, H. Model reference adaptive ux observer based neuro-fuzzy controller
for induction motor drive. Fourtieth IAS Annual Meeting. Conference Record of the 2005 IEEE
Industry Applications Conference, v. 2, p. 12791285, October 2005.
UDDIN, M. N.; WEN, H. Development of a self-tuned neuro-fuzzy controller for induction
motor drives. IEEE Transactions on Industry Applications, v. 43, n. 4, p. 11081116, July
2007.
137
VACLAVEK, P.; BLAHA, P. Lyapunov-function-based ux and speed observer for ac
induction motor sensorless control and parameters estimation. IEEE Transactions on Industrial
Electronics, v. 53, n. 1, p. 138145, February 2006.
VALDENEBRO, L. R. Observadores adaptativos de uxo e velocidade para motores de
induc ao - estudo e implementac ao. Tese (Doutorado) Universidade Estadual de Campinas,
2001.
VALDENEBRO, L. R.; HERN
ANDEZ, J. R.; BIM, E. A neuro-fuzzy based parameter
identication of an indirect vector-controlled induction motor drive. International Conference
on Advanced Intelligent Mechatronics, p. 1923, September 1999.
VALD
`
EZ, M. A. G.; ROMERO, D. R. A neuro-fuzzy based parameter identication of an
indirect vector-controlled induction motor drive. 1
st
International Conference on Electrical
and Electronics Engineering (ICEEE)., p. 439444, June 2004.
VAS, P. Vector Control of AC Machines. [S.l.]: Oxford, U. K., 1990.
VAS, P. Parameter esimation, condition monitoring, and diagnosis of electrical machines.
[S.l.]: Oxford, U. K., 1993.
VAS, P. Sensorless Vector and Direct Torque Control. [S.l.]: Oxford Univ. Press, 1998.
VAS, P. Articial-Intelligence-Based Electrical Machines and Drives. [S.l.]: Oxford Univ.
Press, 1999.
VASUDEVAN, M.; ARUMUGAM, R. A robust torque control of induction motor for electric
vehicle applications using ans. IEEE Region 10 Conference TENCON 2004, v. 4, p. 1720,
November 2004.
VASUDEVAN, M.; ARUMUGAM, R.; PARAMASIVAM, S. Adaptive neuro-fuzzy inference
system modeling of an induction motor. The Fifth International Conference on Power
Electronics and Drive Systems,PEDS 2003., v. 1, p. 427432, November 2003.
WEN, H.; UDDIN, M. N. Adaptive enhanced fuzzy sliding-mode control for electrical servo
drive. Canadian Conference on Electrical and Computer Engineering, v. 3, p. 12251228,
May 2004.
WLAS, M. et al. Articial-neural-network-based sensorless nonlinear control of induction
motors. IEEE Transactions on Energy Conversion, v. 20, n. 3, September 2005.
YAMAMURA, S. Spiral Vector Theory Of Ac Circuits And Machines. [S.l.]: Oxford University
Press, 1992.
YATIM, A. H. B. M.; UTOMO, W. M. Neuro-fuzzy on-line optimal energy control for variable
speed compressor motor drive system. International Conference on Power Electronics and
Drives Systems, PEDS 2005, v. 1, p. 776780, January 2006.
ZHANG, Y. et al. A comparative study of luenberger observer, sliding mode observer and
extended kalman lter for sensorless vector control of induction motor drives. In: IEEE Energy
Conversion Congress and Exposition, 2009. ECCE 2009. [S.l.: s.n.], 2009. p. 2466 2473.
ZIDANI, F. et al. Direct torque control of induction motor with fuzzy stator resistance
adaptation. IEEE Transactions on Energy Conversion, v. 21, n. 2, June 2006.
138
AP
ENDICE A -- Modelo Vetorial do MIT em
Referencial Gen erico
Omodelo vetorial do MIT utilizando a t ecnica de orientac ao se campo se tornou consagrado
ao logo das ultimas d ecadas. Tal modelo pode ser utilizado nos referenciais de campo de estator,
rotor ou magnetizante. Para se atingir esse objetivo se pode lancar m ao das equac oes do MIT
em um referencial gen erico e a partir destas escolher um dos tr es referenciais anteriormente
citados para a soluc ao do equacionamento.
A seguir s ao apresentadas as deduc oes das equac oes para orientac ao de campo do MIT em
referencial gen erico. O modelo fsico do MIT utilizado para o equacionamento e apresentado
na gura A.1 a seguir. O modelo considera tr es enrolamentos de estator e de rotor concentrados
e mecanicamente defasados de 120
. O MIT em quest ao possui rotor n ao saliente em gaiola de
esquilo e efeitos de saturac ao magn etica s ao negligenciados no equacionamento. Os eixos em
quadratura giram espacialmente ` a velocidade angular de rotor e os eixos em quadratura DQ
s ao espacialmente estacion arios.
No referencial estacion ario os vetores de espaco das equac oes de estator e rotor s ao apre-
sentadas pelas eqs. (A.1) e (A.2) a seguir:
u
s
= R
s
i
s
+p
s
(A.1)
u
r
= R
r
i
r
+p
r
j
r
r
(A.2)
Para o motor com rotor em gaiola de esquilo
u
r
= 0.
Os vetores espacias da tens ao do estator, corrente de estator e uxo magn etico de estator da
eq. (A.1) s ao:
u
s
=
2
3
[u
sA
(t) +au
sB
(t) +a
2
u
sC
(t)] = u
sD
+ ju
sQ
(A.3)
i
s
=
2
3
[i
sA
(t) +ai
sB
(t) +a
2
i
sC
(t)] = i
sD
+ ji
sQ
(A.4)
139
Figura A.1: MIT sim etrico com rotor liso
s
=
2
3
[
sA
(t) +a
sB
(t) +a
2
sC
(t)] =
sD
+ j
sQ
= L
s
i
s
+L
m
i
r
(A.5)
Nas eqs. (A.3), (A.4) e (A.5) a e o operador espacial, a = e
j
2
3
.
A partir da eq. (A.2) se pode escrever os vetores espaciais da tens ao, corrente e uxo
magn etico de rotor relativos ao referencial xo no estator:
u
r
=
u
r
e
j
r
= u
rd
+ ju
rq
(A.6)
i
r
=
i
r
e
j
r
= i
rd
+ ji
rq
(A.7)
r
=
r
e
j
r
= L
r
i
r
+L
m
i
s
= L
r
i
r
e
j
r
+L
m
i
s
=
rd
+ j
rq
(A.8)
onde
r
e o angulo de rotor e
u
r
,
i
r
e
r
s ao os vetores espaciais das tens oes, correntes e uxos
de rotor, respectivamente expressos no referencial xo ao rotor:
u
r
=
2
3
[u
ra
(t) +au
rb
(t) +a
2
u
rc
(t)] = u
r
+ ju
r
(A.9)
i
r
=
2
3
[i
ra
(t) +ai
rb
(t) +a
2
i
rc
(t)] = i
r
+ ji
r
(A.10)
r
=
2
3
[
ra
(t) +a
rb
(t) +a
2
rc
(t)] =
r
+ j
r
= L
r
i
r
+L
m
i
s
(A.11)
140
Deni-se agora um sistema referencial gen erico cujos eixos direto e quadratura sejam x e
y, respectivamente, girando a uma velocidade instant anea
g
= p
g
, onde
g
e o angulo entre
o eixo direto sD do referencial estacion ario xo no estator e o eixo direto x do referencial
gen erico, conforme a gura A.2 a seguir:
Figura A.2: Sistema referencial gen erico
As eqs. (A.12), (A.13) e (A.14) a seguir apresentam os vetores espaciais de tens ao, corrente
e uxo magn etico de estator no referencial gen erico:
u
sg
=
u
s
e
j
g
= u
sx
+ ju
sy
(A.12)
i
sg
=
i
s
e
j
g
= i
sx
+ ji
sy
(A.13)
sg
=
s
e
j
g
=
sx
+ j
sy
(A.14)
Da mesma forma, as eqs. (A.15), (A.16) e (A.17) a seguir apresentam os vetores espaciais
de tens ao, corrente e uxo magn etico de rotor no referencial gen erico:
u
rg
=
u
r
e
j(
g
r
)
= u
rx
+ ju
ry
(A.15)
i
rg
=
i
r
e
j(
g
r
)
= i
rx
+ ji
ry
(A.16)
rg
=
r
e
j(
g
r
)
=
rx
+ j
ry
(A.17)
Substituindo as eqs. (A.12) a (A.17) nas eqs. (A.1), (A.2), (A.5) e (A.8) resultam as
equac oes dos vetores espaciais de tens ao e corrente no sistema referencial gen erico a seguir:
u
sg
= R
s
i
sg
+p
sg
+ j
g
sg
(A.18)
141
u
rg
= R
r
i
rg
+p
rg
+ j(
g
r
)
rg
(A.19)
onde os uxos de estator e rotor no referencial gen erico podem ser expressos em termos dos
vetores espaciais das correntes de estator e rotor conforme as eqs. (A.20) e (A.21) a seguir:
sg
= L
s
i
sg
+L
m
i
rg
(A.20)
rg
= L
r
i
rg
+L
m
i
sg
(A.21)
142
AP
ENDICE B -- Acionamento Vetorial no Simulink
Figura B.1: Modelo do acionamento vetorial no simulink
143
AP
ENDICE C -- Par ametros do MIT
Tabela C.1: Par ametros do motor (Simulac ao)
Par ametro Valor
R
s
0.4
R
r
0.416
L
s
0.00178 H
L
m
0.0629 H
L
r
0.00178 H
Pot encia 5 CV
P 1
J 0.4 Kgm
2
Tens ao nominal de linha 220 V
Frequ encia nominal 60 Hz
Tabela C.2: Par ametros do motor (Experimental)
Par ametro Valor
R
s
9.6
R
r
8.87
L
s
0.0193 H
L
m
0.5270 H
L
r
0.0193 H
Pot encia 200 W
P 1
J 9x10
4
Kgm
2
Tens ao nominal de linha 220 V
Frequ encia nominal 60 Hz
144
AP
ENDICE D -- Sintonia do controlador da malha
de velocidade
O controlador utilizado na malha de velocidade e do tipo PI. Classicamente o projeto e
realizado considerando a din amica de primeira ordem da malha de velocidade com o momento
de in ercia e o coeciente de atrito viscoso, conforme a gura D.1 a seguir.
rref
PI 1/(Js+B) (3/2)PL i
mm m
erro Tref
i
sy
Figura D.1: Diagrama de blocos do controle PI da malha de velocidade
Em particular o valor do coeciente de atrito viscoso utilizado no projeto foi nulo. Atrav es
do lugar geom etrico das razes foram obtidos os valores de P=5,35 e I=2,67 do controlador em
tempo contnuo para resposta com amortecimento crtico como mostra a D.2.
O erro de velocidade e aplicado ao controlador, sendo sua sada a refer encia de torque (T
re f
)
para o acionamento. A partir da eq. (3.34), se determina a componente do eixo em quadratura
de estator, no referencial de uxo magn etico de entreferro (i
sy
), respons avel pela correc ao de
velocidade.
Para vericar a resposta do controlador projetado uma entrada em degrau de velocidade de
300 rad/s foi aplicada ao diagrama de blocos da gura D.1 e ao esquema de acionamento FOC
da gura B.1. A resposta se encontra na gura D.3 a seguir.
145
Figura D.2: Lugar geom etrico das razes com controle PI
0 0.5 1 1.5 2 2.5 3 3.5
x 10
5
50
0
50
100
150
200
250
300
350
Respostas de velocidade
Amostras
V
e
l
o
c
i
d
a
d
e
s
(
r
a
d
/
s
)
Resposta FOC
Resposta projeto
Figura D.3: Respostas de velocidade com controle PI
Você também pode gostar
- Respira MaxDocumento20 páginasRespira MaxJessica BentoAinda não há avaliações
- ME09 - Funções Exponenciais e LogarítmicasDocumento30 páginasME09 - Funções Exponenciais e LogarítmicasFranciscoMarcioAinda não há avaliações
- Apostila Fenomenos Transportes 1 - RoberaldoDocumento49 páginasApostila Fenomenos Transportes 1 - Roberaldoewertoneot67% (3)
- Apostila de Técnicas de CeratometriaDocumento6 páginasApostila de Técnicas de CeratometriaRebeca Alves100% (2)
- Síntese de Sulfato de Cobre (II) MonohidratadoDocumento10 páginasSíntese de Sulfato de Cobre (II) MonohidratadoJoana_MariaFAinda não há avaliações
- Ressignificando A Escola Na Proposta InclusivaDocumento6 páginasRessignificando A Escola Na Proposta InclusivaMarizete ReisAinda não há avaliações
- Filtragem de rejeitos de minério de ferroDocumento129 páginasFiltragem de rejeitos de minério de ferroelbatistonAinda não há avaliações
- Robôs RPGDocumento4 páginasRobôs RPGCarlos GeorgeAinda não há avaliações
- Reflexão da Luz e suas LeisDocumento10 páginasReflexão da Luz e suas LeisRodrigo Santiago SilveiraAinda não há avaliações
- Prática 11 - EspectrofotometriaDocumento6 páginasPrática 11 - EspectrofotometriaJosé FernandoAinda não há avaliações
- A vida na grande cidade e o espírito individualDocumento4 páginasA vida na grande cidade e o espírito individualPedro MagriAinda não há avaliações
- Ensaio de potência de antibióticosDocumento7 páginasEnsaio de potência de antibióticosMarciele FerreiraAinda não há avaliações
- Controle e Gerenciador de Atividades 2012Documento52 páginasControle e Gerenciador de Atividades 2012fabriciodemarcoAinda não há avaliações
- Densidade de materiaisDocumento2 páginasDensidade de materiaisPaulo Viegas0% (1)
- Dicas de segurança para microondasDocumento2 páginasDicas de segurança para microondasRobertobrastemp100% (2)
- Mecânica da partícula: exercícios resolvidos de forças, velocidade e aceleraçãoDocumento17 páginasMecânica da partícula: exercícios resolvidos de forças, velocidade e aceleraçãolelcamposAinda não há avaliações
- Apresentação - Técnica - Mohave - 2012 (Somente Leitura) (Modo de Compatibilidade)Documento18 páginasApresentação - Técnica - Mohave - 2012 (Somente Leitura) (Modo de Compatibilidade)Abraão Allison67% (3)
- Estruturas e Propriedades das CerâmicasDocumento22 páginasEstruturas e Propriedades das CerâmicasRuy AlvesAinda não há avaliações
- Corrosão Metálica AulaDocumento52 páginasCorrosão Metálica AulaHortencia NoronhaAinda não há avaliações
- Exercicios de Eletrostatica 1 - 1Documento3 páginasExercicios de Eletrostatica 1 - 1Milton AlvesAinda não há avaliações
- Leitura e interpretação de desenho mecânicoDocumento71 páginasLeitura e interpretação de desenho mecânicoJean Carlos FerronAinda não há avaliações
- Tratamento acústico de áreas lindeiras à rodoviaDocumento9 páginasTratamento acústico de áreas lindeiras à rodoviaRenata CruzAinda não há avaliações
- Reciclagem de PolímerosDocumento16 páginasReciclagem de PolímerosGustavo RamosAinda não há avaliações
- História Da Construção MetálicaDocumento5 páginasHistória Da Construção MetálicaBeatriz FerreiraAinda não há avaliações
- Regulador de tensão contínua para lâmpadas e pequenos motoresDocumento1 páginaRegulador de tensão contínua para lâmpadas e pequenos motoresCorreia FernandoAinda não há avaliações
- NBR 6323 - Produto de Aço Ou Ferro Fundido Revestido de ZinDocumento3 páginasNBR 6323 - Produto de Aço Ou Ferro Fundido Revestido de ZinDaniel Rocha71% (7)
- Telhas Perkus: Folheto técnico sobre vantagens e especificações das telhasDocumento38 páginasTelhas Perkus: Folheto técnico sobre vantagens e especificações das telhasaugustostosAinda não há avaliações
- AT102 Aula06Documento53 páginasAT102 Aula06Junior C. SilvaAinda não há avaliações
- 3 Workshop Cravacao Com Martelo Hidraulico Sergio ParaisoDocumento121 páginas3 Workshop Cravacao Com Martelo Hidraulico Sergio ParaisoWanderleiRodriguesAinda não há avaliações