Você também pode gostar
- Switches y Sensores CATDocumento24 páginasSwitches y Sensores CATEdgar MaitaAinda não há avaliações
- Actividad 2Documento6 páginasActividad 2Oswaldo PáezAinda não há avaliações
- PWMDocumento20 páginasPWMAcuña Lazaro AnthonyAinda não há avaliações
- DMpA 07 U1 B1 5TO TEMP PDFDocumento11 páginasDMpA 07 U1 B1 5TO TEMP PDFSamer Sanca PomaAinda não há avaliações
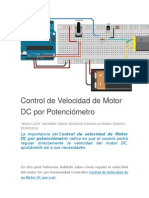
- Control de Velocidad de Motor DC Por PotenciómetroDocumento12 páginasControl de Velocidad de Motor DC Por PotenciómetroJvr Omar Espinoza0% (2)
- Informe #4 Motor DC Sin EscobillasDocumento3 páginasInforme #4 Motor DC Sin EscobillasCatalina GonzálezAinda não há avaliações
- Laboratorio 03 Micro - PWMDocumento14 páginasLaboratorio 03 Micro - PWMSilence EngelAinda não há avaliações
- Ensayo 3Documento6 páginasEnsayo 3Alex UribeAinda não há avaliações
- Carta Compromiso BlancoDocumento11 páginasCarta Compromiso BlancoGustavo BautistaAinda não há avaliações
- Electrónica Básica para Motores CATDocumento33 páginasElectrónica Básica para Motores CATpevare100% (4)
- Moreno Gallegos Emilio 17041177Documento5 páginasMoreno Gallegos Emilio 17041177EDGAR EMILIO MORENO GALLEGOSAinda não há avaliações
- Puerta de Seguridad Con Arduino UNODocumento4 páginasPuerta de Seguridad Con Arduino UNOWilson MaciasAinda não há avaliações
- Perfil Red Neuronal v1.0Documento29 páginasPerfil Red Neuronal v1.0Carlos QuintoAinda não há avaliações
- Ejercicios Tema 6. Temporizadoresv2Documento22 páginasEjercicios Tema 6. Temporizadoresv2Daniel Jesus Romero MartinAinda não há avaliações
- Capacitacion Norma IEC60034 25 Pate - 1Documento60 páginasCapacitacion Norma IEC60034 25 Pate - 1Aleymar Arturo Travi JojoaAinda não há avaliações
- Informe N°2 - Circuitos ElectronicosDocumento15 páginasInforme N°2 - Circuitos ElectronicosH Lizana BartholomeoAinda não há avaliações
- Reparación de InversoresDocumento27 páginasReparación de Inversoresefren hurtadoAinda não há avaliações
- Alternadores Controlados Por La PCM 1.PDF Versión 1Documento38 páginasAlternadores Controlados Por La PCM 1.PDF Versión 1ismael_alig1881Ainda não há avaliações
- Conversor ACAC Con Control de Fase Directo en Lazo Cerrado Aplicado A Carga Resistiva.Documento5 páginasConversor ACAC Con Control de Fase Directo en Lazo Cerrado Aplicado A Carga Resistiva.electroz3l6Ainda não há avaliações
- NRF-249-PEMEX-201011 Sistemas de Fuerza IninterrumpibleDocumento42 páginasNRF-249-PEMEX-201011 Sistemas de Fuerza Ininterrumpiblefernandolozada79100% (1)
- Presentacion GaDocumento56 páginasPresentacion GaSOPORTE TECNICOAinda não há avaliações
- Hyundai AvrDocumento30 páginasHyundai AvrivanAinda não há avaliações
- Fabrica de RuidosDocumento42 páginasFabrica de RuidosVictor Heitzmann JordanAinda não há avaliações
- Brazo RobotDocumento33 páginasBrazo RobotPequesi SegAinda não há avaliações
- ModulaciónDocumento36 páginasModulaciónOrlando FernándezAinda não há avaliações
- PPT-PC4 - Grupo 2Documento30 páginasPPT-PC4 - Grupo 2Lisset FloresAinda não há avaliações
- Como Construir Un Robot ArañaDocumento20 páginasComo Construir Un Robot ArañaAlfred Maza QuiñonesAinda não há avaliações
- Clase 3Documento61 páginasClase 3hersonAinda não há avaliações
- Primera EntregaDocumento5 páginasPrimera EntregaJhoan PovedaAinda não há avaliações
- Ultramat 23 enDocumento168 páginasUltramat 23 enalexey03100% (1)