Você também pode gostar
- Advanced Theory of Constraint and Motion Analysis for Robot MechanismsNo EverandAdvanced Theory of Constraint and Motion Analysis for Robot MechanismsAinda não há avaliações
- Ball Roller and Gear Robot With Newton EulerDocumento13 páginasBall Roller and Gear Robot With Newton EulerShivi SivaAinda não há avaliações
- Mathematical Modeling of An Omnidirectional Drive System For Robotic ApplicationsDocumento6 páginasMathematical Modeling of An Omnidirectional Drive System For Robotic ApplicationsSergio LinAinda não há avaliações
- IPRoMM2020 2DOF OmniWheelRobot 20200922Documento11 páginasIPRoMM2020 2DOF OmniWheelRobot 20200922prakash saralayaAinda não há avaliações
- Trajectory Generation Experimental Results of A Single Traction Ball Mobile RobotDocumento6 páginasTrajectory Generation Experimental Results of A Single Traction Ball Mobile RobotJosé Luis BohórquezAinda não há avaliações
- High Frequency Railway Vehicle Track Dynamics Through Flexible Rotating WheelsetsDocumento14 páginasHigh Frequency Railway Vehicle Track Dynamics Through Flexible Rotating WheelsetsAli KasimAinda não há avaliações
- A Motion ControlDocumento6 páginasA Motion ControlRonald CaravacaAinda não há avaliações
- Three Axis Rotary PlatformDocumento6 páginasThree Axis Rotary PlatformSudhanwa KulkarniAinda não há avaliações
- Centrifugal Force Compensation of A Two-Wheeled Balancing RobotDocumento6 páginasCentrifugal Force Compensation of A Two-Wheeled Balancing RobotAs'ad Syamsul ArifinAinda não há avaliações
- Geometric Controlla Ot DynamicsDocumento6 páginasGeometric Controlla Ot DynamicsAmino fileAinda não há avaliações
- Modeling and Adaptive Control of An Omni-Mecanum-Wheeled RobotDocumento14 páginasModeling and Adaptive Control of An Omni-Mecanum-Wheeled RobotTelmoAinda não há avaliações
- Wheel Leg 2011-224Documento8 páginasWheel Leg 2011-224idorofte8235Ainda não há avaliações
- Design of A Leg-Wheel Hybrid Mobile Platform: November 2009Documento7 páginasDesign of A Leg-Wheel Hybrid Mobile Platform: November 2009Anonymous 2pYDDwtSkcAinda não há avaliações
- Dynamic Modeling and Control of SegwayDocumento35 páginasDynamic Modeling and Control of SegwayMohamed Amine ZehryAinda não há avaliações
- Chapter 12, Mobile RobotDocumento17 páginasChapter 12, Mobile RobotAkram AlsadeqAinda não há avaliações
- Control of The Underactuated Inertia Wheel Inverted Pendulum For Stable Limit Cycle GenerationDocumento16 páginasControl of The Underactuated Inertia Wheel Inverted Pendulum For Stable Limit Cycle Generationhoangkhuong89Ainda não há avaliações
- Synthesis and Analysis of The Five-Link Rear Suspension System Used in AutomobilesDocumento18 páginasSynthesis and Analysis of The Five-Link Rear Suspension System Used in AutomobilesManish RajAinda não há avaliações
- Performance Comparison Between Fuzzy Logic Controller (FLC) and PID Controller For A Highly Nonlinear Two-Wheels Balancing RobotDocumento6 páginasPerformance Comparison Between Fuzzy Logic Controller (FLC) and PID Controller For A Highly Nonlinear Two-Wheels Balancing RobotVignesh RamakrishnanAinda não há avaliações
- Parámetros Característicos MotoresDocumento6 páginasParámetros Característicos MotoresG Camilo CarcamoAinda não há avaliações
- Kinematic Analysis and Control Algorithm For The BallbotDocumento8 páginasKinematic Analysis and Control Algorithm For The BallbotThanh TrungfdrAinda não há avaliações
- Adaptive Control of Mobile Manipulator To Track Horizontal Smooth Curved Apply For Welding ProcessDocumento10 páginasAdaptive Control of Mobile Manipulator To Track Horizontal Smooth Curved Apply For Welding ProcessAJER JOURNALAinda não há avaliações
- 10 - A Spherical Hopping Robot For Exploration in Complex EnvironmentsDocumento6 páginas10 - A Spherical Hopping Robot For Exploration in Complex EnvironmentsjowdiverAinda não há avaliações
- Lauria 2018 Instantaneous Centre Rotation Omnidirectional Mobile RobotsDocumento14 páginasLauria 2018 Instantaneous Centre Rotation Omnidirectional Mobile Robotsthh hoanAinda não há avaliações
- Control Engineering Practice Volume 1 PDFDocumento10 páginasControl Engineering Practice Volume 1 PDFOkgi KuswoyoAinda não há avaliações
- The Design of Parallel Combination For Cam Mechanism: SciencesDocumento7 páginasThe Design of Parallel Combination For Cam Mechanism: SciencesKunal SharmaAinda não há avaliações
- Modeling Control and Simulation of Two Axes Gimbal Seeker Using Fuzzy PID ControllerDocumento6 páginasModeling Control and Simulation of Two Axes Gimbal Seeker Using Fuzzy PID ControllerRonald CaravacaAinda não há avaliações
- Modeling Rolling Gaits of A Snake Robot: Weikun Zhen, Chaohui Gong and Howie ChosetDocumento6 páginasModeling Rolling Gaits of A Snake Robot: Weikun Zhen, Chaohui Gong and Howie Chosetpepe GoAinda não há avaliações
- Gyroscopic Stabilization of Unstable Vehicles: Configurations, Dynamics and ControlDocumento19 páginasGyroscopic Stabilization of Unstable Vehicles: Configurations, Dynamics and ControlIrfanAinda não há avaliações
- ReportDocumento13 páginasReportMamta SindhuAinda não há avaliações
- Conventional and Slip Steering For Multi-Wheel Planetary RoversDocumento39 páginasConventional and Slip Steering For Multi-Wheel Planetary RoversGreggs ShopukAinda não há avaliações
- Mathematical Modeling of Wheeled Mobile Robots: KeywordsDocumento5 páginasMathematical Modeling of Wheeled Mobile Robots: KeywordsRaviAinda não há avaliações
- Control An Mnidirectional Mobile Robot: Keigo WatanabeDocumento10 páginasControl An Mnidirectional Mobile Robot: Keigo WatanabeTrần Nguyên KhảiAinda não há avaliações
- Multilink 5 LinksDocumento18 páginasMultilink 5 LinkstotyAinda não há avaliações
- Modeling and Control of A 4-Wheel Skid-Steering Mobile RobotDocumento20 páginasModeling and Control of A 4-Wheel Skid-Steering Mobile RobotpqthaiAinda não há avaliações
- Dynamic Analysis of A Nonholonomic Two-Wheeled Inverted Pendulum RobotDocumento22 páginasDynamic Analysis of A Nonholonomic Two-Wheeled Inverted Pendulum RobotIsaiah YoungAinda não há avaliações
- Design and Analysis of A Spherical Mobile RobotDocumento8 páginasDesign and Analysis of A Spherical Mobile RobotAl Bajad MamadAinda não há avaliações
- Econtents of TomDocumento88 páginasEcontents of TomSuraj 1212Ainda não há avaliações
- An Actuator With Physically Variable Stiffness For Highly Dynamic Legged LocomotionDocumento6 páginasAn Actuator With Physically Variable Stiffness For Highly Dynamic Legged LocomotionAshok B KumarAinda não há avaliações
- Dynamics of RobotsDocumento6 páginasDynamics of RobotsWael Fawzy MohamedAinda não há avaliações
- Dynamic Mobile Robot Paper 1Documento6 páginasDynamic Mobile Robot Paper 1pgamasterAinda não há avaliações
- The Personal Quadrotor Project Brief State Report: Jaromir Dvorak (Dvoraj13@fel - Cvut.cz) Horn I Cerekev, October 17, 2010Documento14 páginasThe Personal Quadrotor Project Brief State Report: Jaromir Dvorak (Dvoraj13@fel - Cvut.cz) Horn I Cerekev, October 17, 2010Hashem Mohamed HashemAinda não há avaliações
- Modelling and Simulation of A Quad-Rotor Helicopter: A. Bousbaine, M. H. Wu, G. T. PoyiDocumento6 páginasModelling and Simulation of A Quad-Rotor Helicopter: A. Bousbaine, M. H. Wu, G. T. PoyiDalia MuraddAinda não há avaliações
- Investigation of Nonlinear Free Vibration Analysis and Critical Speeds of Lightweight Rotor Bearing SystemDocumento24 páginasInvestigation of Nonlinear Free Vibration Analysis and Critical Speeds of Lightweight Rotor Bearing SystemPravesh S NairAinda não há avaliações
- A Study On The Dynamic Analysis Modelling For High-Speed Roller BearingsDocumento10 páginasA Study On The Dynamic Analysis Modelling For High-Speed Roller BearingsRCUAinda não há avaliações
- Preared By: Dr. J. N. KERAITA: Emg 2404: Mechanics of Machines IiiDocumento9 páginasPreared By: Dr. J. N. KERAITA: Emg 2404: Mechanics of Machines IiiMuthoka VincentAinda não há avaliações
- Ijsrdv1i9084 PDFDocumento2 páginasIjsrdv1i9084 PDFKanaga VaratharajanAinda não há avaliações
- 16 - Velocity Analysis of Tri-Axial Differential Pipeline RobotDocumento5 páginas16 - Velocity Analysis of Tri-Axial Differential Pipeline RobotZaida AsyfaAinda não há avaliações
- ModelingandControlofX ShapeQuadcopterDocumento13 páginasModelingandControlofX ShapeQuadcopterዮናስAinda não há avaliações
- Motorized Gyroscope Apparatus 1Documento7 páginasMotorized Gyroscope Apparatus 1Rickson Viahul Rayan CAinda não há avaliações
- Analysis of Rigid Dynamic of A Spatial Slider-Crank Mechanism With Spherical Clearance Joints Using ANSYS Software Huynh Ngoc Thai, SHYH-CHOUR HUANGDocumento5 páginasAnalysis of Rigid Dynamic of A Spatial Slider-Crank Mechanism With Spherical Clearance Joints Using ANSYS Software Huynh Ngoc Thai, SHYH-CHOUR HUANGThaiHuynhNgocAinda não há avaliações
- Parameters Uncertainty Analysis of Posture Control of A Four-Wheel-Legged Robot With Series Slow Active Suspension SystemDocumento20 páginasParameters Uncertainty Analysis of Posture Control of A Four-Wheel-Legged Robot With Series Slow Active Suspension Systemlutfil hadiAinda não há avaliações
- Kinematic and Dynamic Modelling of Parallel Robots For Flight SimulatorsDocumento25 páginasKinematic and Dynamic Modelling of Parallel Robots For Flight SimulatorsPodar RobertAinda não há avaliações
- AndiDocumento10 páginasAndiAdi DanAinda não há avaliações
- An Approach To The Kinematics and Dynamics of A Four Wheel Mecanum VehicleDocumento11 páginasAn Approach To The Kinematics and Dynamics of A Four Wheel Mecanum VehicleDevub Das100% (1)
- Inverted PendulumDocumento18 páginasInverted PendulumLingxi HuangAinda não há avaliações
- Rad Sa TomomDocumento4 páginasRad Sa Tomomdusanmih86Ainda não há avaliações
- A Review of Models and Structures For Wheeled Mobile Robots - Four Case StudiesDocumento6 páginasA Review of Models and Structures For Wheeled Mobile Robots - Four Case StudiesThanh NguyenAinda não há avaliações
- Rotary Inverted PendulumDocumento8 páginasRotary Inverted PendulumEduardo BittencourtAinda não há avaliações
- Planar Linkage Synthesis: A modern CAD based approachNo EverandPlanar Linkage Synthesis: A modern CAD based approachAinda não há avaliações
- Mechanical Design: Mott (2004), Shigley and Uicker (1995), Budynas and Nisbett (2008), and Norton (2000)Documento77 páginasMechanical Design: Mott (2004), Shigley and Uicker (1995), Budynas and Nisbett (2008), and Norton (2000)Ashesh BhattaraiAinda não há avaliações
- GEEE'2016 BookletDocumento34 páginasGEEE'2016 Bookletجمال ضيفي100% (1)
- Complex Engineering Problem: ObjectiveDocumento3 páginasComplex Engineering Problem: ObjectiveUsman AslamAinda não há avaliações
- Y12 SacDocumento2 páginasY12 SacDani AdonaiAinda não há avaliações
- Chapter 8 Electron Configurations and PeriodicityDocumento74 páginasChapter 8 Electron Configurations and PeriodicityKhaleq MohammadAinda não há avaliações
- Sol Series10Documento8 páginasSol Series10gbd77211Ainda não há avaliações
- 3.31 Inverse of Quadratic FunctionsDocumento3 páginas3.31 Inverse of Quadratic Functionsvexiox222Ainda não há avaliações
- Caledonian College of Engineering: Laboratory ManualDocumento35 páginasCaledonian College of Engineering: Laboratory ManualHafsa AlhaddabiAinda não há avaliações
- OTC 4205 - Evaluating Pile Drivability For Hard Clay, Very Dense Sand, and RockDocumento17 páginasOTC 4205 - Evaluating Pile Drivability For Hard Clay, Very Dense Sand, and RocknsaifulAinda não há avaliações
- Determining SIMS Relative Sensitivity Factors From Ion Implanted External StandardsDocumento3 páginasDetermining SIMS Relative Sensitivity Factors From Ion Implanted External StandardsLuigi HernándezAinda não há avaliações
- Martina DiClemente - FeedMonkeySEDocumento4 páginasMartina DiClemente - FeedMonkeySEMartina DiClementeAinda não há avaliações
- Evaluating The Dual Porosity of Landfilled Municipal Solid WasteDocumento9 páginasEvaluating The Dual Porosity of Landfilled Municipal Solid WasteMary PinAinda não há avaliações
- Grade 10 Math in 1 Hour Questions-1Documento16 páginasGrade 10 Math in 1 Hour Questions-1ArnoldAinda não há avaliações
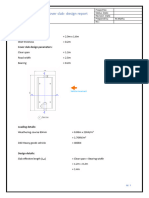
- D400-Precast Cover Slab Design ReportDocumento8 páginasD400-Precast Cover Slab Design ReportmathuAinda não há avaliações
- Dr. Omar El Dakkak: Associate ProfessorDocumento3 páginasDr. Omar El Dakkak: Associate ProfessorleksremeshAinda não há avaliações
- 2021 Calibration of Geometric Parameters and Error Compensation of Non-Geometric Parameters For Cable-Driven Parallel RobotsDocumento12 páginas2021 Calibration of Geometric Parameters and Error Compensation of Non-Geometric Parameters For Cable-Driven Parallel RobotsThanh Hai NguyenAinda não há avaliações
- 2001 Aristizabal - Semirigid Axial LoadsDocumento10 páginas2001 Aristizabal - Semirigid Axial LoadskarrakukafeoAinda não há avaliações
- Kongu Engineering College, Perundurai, Erode - 638060, IndiaDocumento2 páginasKongu Engineering College, Perundurai, Erode - 638060, IndiaraviciviltAinda não há avaliações
- Lesson 6 - Chain Rule - General FormulaDocumento12 páginasLesson 6 - Chain Rule - General FormulaJacob SanchezAinda não há avaliações
- Assignment 2Documento14 páginasAssignment 2rodjie.hakeAinda não há avaliações
- Equilibrium Positions at Instant T 10 CM: A B C D E F G H IDocumento17 páginasEquilibrium Positions at Instant T 10 CM: A B C D E F G H IVincent haAinda não há avaliações
- List of Geology: Sr. Code Isbn Author Title FC FC Price Year SubjectDocumento3 páginasList of Geology: Sr. Code Isbn Author Title FC FC Price Year SubjectwajeehAinda não há avaliações
- WINSEM2017-18 - ECE2005 - TH - TT304 - VL2017185001360 - Reference Material IV - CatI - A2 - Slot - KeyDocumento3 páginasWINSEM2017-18 - ECE2005 - TH - TT304 - VL2017185001360 - Reference Material IV - CatI - A2 - Slot - KeyCh PranushaAinda não há avaliações
- Lewis Structure VSEPR Theory VB Hybridization WKSTDocumento3 páginasLewis Structure VSEPR Theory VB Hybridization WKSTYahya RajputAinda não há avaliações
- Polymers: Numerical Studies of The Viscosity of Reacting Polyurethane Foam With Experimental ValidationDocumento14 páginasPolymers: Numerical Studies of The Viscosity of Reacting Polyurethane Foam With Experimental ValidationmgrubisicAinda não há avaliações
- CSEC Physics June 1999 P1Documento10 páginasCSEC Physics June 1999 P1Laimen ReveskiAinda não há avaliações
- Chapter 6 - 1st and 2nd Order Transient Analysis ElectricalDocumento54 páginasChapter 6 - 1st and 2nd Order Transient Analysis ElectricalDouglas OngomAinda não há avaliações
- PHET: Electricity & MagnetismDocumento3 páginasPHET: Electricity & MagnetismAmanuel AberaAinda não há avaliações
- S1 To S2 Summer Supplementary Exercise 2013Documento9 páginasS1 To S2 Summer Supplementary Exercise 2013YuenHei KwokAinda não há avaliações
- 1978 A-Level Pure Mathematics Paper I: B Ab B A ADocumento7 páginas1978 A-Level Pure Mathematics Paper I: B Ab B A AChong Ka LeeAinda não há avaliações