IOSR Journal of Engineering (IOSRJEN) www.iosrjen.
org
ISSN (e): 2250-3021, ISSN (p): 2278-8719
Vol. 04, Issue 04 (April. 2014), ||V1|| PP 08-14
I nternational organization of Scientific Research 8 | P a g e
An Overview of Image processing for traffic applications
Nikita Sankhe, Poonam Sonar
, Deven Patel
1
(M.E Student, Department of Electronics & Telecommunication, Rajiv Gandhi Institute of Tech.,
Mumbai University, India)
2
(Asst.Professor, Department of Electronics & Telecommunication, Rajiv Gandhi Institute of Tech.,
Mumbai University, India)
3(Asst.Professor, Department of Electronics & Telecommunication, Rajiv Gandhi Institute of Tech.,
Mumbai University, India)
Abstract: - The frequent traffic jams at major junctions call for an efficient traffic management system in place.
The resulting wastage of time and increase in pollution levels can be eliminated on a city-wide scale by these
systems. In this paper we present an overview of image processing and analysis tools used in these applications
and we relate these tools with complete systems developed for specific traffic applications. More specifically,
we categorize processing methods based on their input data as feature-driven, area-driven, or model-based and
the domain of processing as spatial or temporal frames.The image sequences from a camera are analyzed using
various edge detection and object counting methods to obtain the most efficient technique. Subsequently, the
number of vehicles at the intersection is evaluated and traffic is efficiently managed. The paper also proposes to
implement a real-time emergency vehicle detection system. In case an emergency vehicle is detected, the lane is
given priority over all the others.
Keywords: - Traffic monitoring, automatic lane finding, Object detection, Emergency vehicles, Image
Processing.
I. INTRODUCTION
The application of image processing and computer vision techniques to the analysis of video sequences
of traffic flow offers considerable improvements over the existing methods of traffic data collection and road
traffic monitoring. Existing methods include the detectors such as loop, radar, infrared, ultrasonic, and
microwave detectors which are expensive with limited capacity and involve installation, maintenance, and
implementation difficulties. Image processing offer a relatively low installation cost with little traffic disruption
during maintenance. Also they provide wide area monitoring allowing analysis of traffic flows and turning
movements, speed measurement, multiple-point vehicle counts, vehicle classification and highway state
assessment (e.g. congestion or incident detection).
Image processing also finds extensive applications in the related field of autonomous vehicle guidance,
mainly for determining the vehicles relative position in the lane and for obstacle detection. In section2 traffic
analysis can be done using automatic lane finding. In section 3 object detection discussed in detail and in section
4 emergency vehicle detection system is explained.
II. AUTOMATIC LANE FINDING
Automatic lane finding (ALF) is an important task for an adaptive traffic monitoring system. ALF can
assist and simplify the installation of a detection system. It enables applications in active vision systems, where
the camera viewing angle and the focal length of the camera lens may be controlled by the system operator to
find an optimum view. Based on the two features namely lane marking and road edges, lane finding is
characterized into two classes [5]
2.1 LANE REGION DETECTION
This class relates the detection of the lane with the changing intensity distribution along the region of a
lane. This class considers just the changes in the gray-scale values within an image sequence, without
addressing the problem of motion estimation which causes classification problem which labels image pixels into
road and non-road classes based on particular features. A typical classification problem involves the steps of
feature extraction, feature de-correlation and reduction, clustering and segmentation.
An Overview of Image processing for traffic applications
I nternational organization of Scientific Research 9 | P a g e
2.1.1 COLOR BASED SEGMENTATION
In this case, the features are defined by the spectral response of the illumination at the red, green and blue
bands. At each pixel, the (R, G, B) value defines the feature vector and the classification can be performed
directly on the (R, G, B) scatter diagram of the image.
Fig (1): color based segmentation [3, 5]
2.1.2 TEXTURE BASED SEGMENTATION
In this case, the texture of the image has been used as a feature for classification. The texture of the
road is normally smoother than that of the environment, allowing for region separation in its feature space. The
texture calculation can be based on the amplitude of the gradient operator at each image area which uses a
normalized gradient measure based on a high-resolution and a low-resolution (smoothed) image in order to
handle shadow interior and boundaries. [5]
Fig(2): texture based segmentation[5]
2.2 FEATURE-DRIVEN APPROACH
This class of approach is based on the detection of edges in the image and the organization of edges into
meaningful structures (lanes or lane markings). This class involves two levels of processing like feature
detection and feature aggregation.
2.2.1 FEATURE DETECTION
This part aims at extracting intensity discontinuities. To make the detection more effective, image
enhancement is performed followed by a gradient operator. The dominant edges are extracted based on
thresholding of the gradient magnitude. At this stage, the direction of edges at each pixel can be computed based
on the phase of the gradient and a curvature of line segments can be estimated based on neighborhood relations.
[6]
An Overview of Image processing for traffic applications
I nternational organization of Scientific Research 10 | P a g e
2.2.2 FEATURE AGGREGATION
This process organizes edge segments into meaningful structures (lane markings) based on short range
or long-range attributes of the lane. Short-range aggregation considers local lane fitting into the edge structure of
the image. Long-range aggregation is based on a line intersection model, based on the assumption of smooth
road curvature. Thus gross road boundaries and markings must be directed towards a specific point in the
image, the focus of expansion (FOE) of the camera system. Along these directions, it detects lane markings
through a horizontal (linear) edge detector and enhances vertical edges via a morphological operator. For each
horizontal line, it then forms correspondences of edge points to a two-lane road model (three lane markings) and
identifies the most frequent lane width along the image, through a histogram analysis.
In general, feature driven approaches are highly dependent on the methods used to extract features
and they suffer from noise effects and irrelevant feature structures. Often in practice the strongest edges are not
the road edges, so that the detected edges do not necessarily fit a straight-line or a smoothly varying model.
Shadow edges can appear quite strong, highly affecting the line tracking approach.[3,6]
III. OBJECT DETECTION
Some fundamental issues of object detection are considered in this section. Different approaches have been
categorized according to the method used to isolate the object from the background on a single frame or a
sequence of frames.
3.1 THRESHOLDING
This is one of the simplest, but less effective techniques, which operates on still images. It is based on the
notion that vehicles are compact objects having different intensity form their background. Thus by thresholding
intensities in small regions we can separate the vehicle from the background. This approach depends heavily on
the threshold used, which must be selected appropriately for a certain vehicle and its background. Adaptive
thresholding can be used to account for lighting changes, but cannot avoid the false detection of shadows or
missed detection of parts of the vehicle with similar intensities as its environment. To aid the thresholding
process, binary mathematical morphology can be used to aggregate close pixels into a unified object.
Furthermore, gray-scale morphological operators have been proposed for object detection and identification that
are insensitive to lighting variation.[1,3,5]
Fig(3): Object detection done using thresholding[3]
1.1.1 MULTI GRID IDENTIFICATION OF REGIONS OF INTEREST
This method first generates a hierarchy of images at different resolutions. Subsequently, a region search
begins at the top level (coarse to fine). Compact objects that differ from their background remain distinguishable
in the low-resolution image, whereas noise and small intensity variations tend to disappear at this level. Thus,
the low-resolution image can immediately direct attention to the pixels that correspond to such objects in the
initial image. Each pixel of interest is selected according to some interest function which may be a function of
the intensity values of its adjacent pixels, edge strength, or successive frame differencing for motion analysis.
[4]
3.2 EDGE-BASED DETECTION (SPATIAL DIFFERENTIATION)
Approaches in this class are based on the edge-features of objects. They can be applied to single images
to detect the edge structure of even still vehicles. Morphological edge-detection schemes have been extensively
applied, since they exhibit superior performance. In traffic scenes, the results of an edge detector generally
An Overview of Image processing for traffic applications
I nternational organization of Scientific Research 11 | P a g e
highlight vehicles as complex groups of edges, whereas road areas yield relatively low edge content. Thus the
presence of vehicles may be detected by the edge complexity within the road area, which can be quantified
through analysis of the histogram. Alternatively, the edges can be grouped together to form the vehicles
boundary.[2,6]
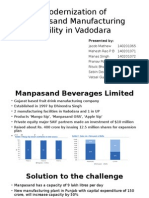
Fig(4): object detection done using different edge detection algorithm[6]
Fig.(4.a) input image is given. In Fig (4.b), Boolean edge detector is used to perform a decent job of
marking the locations of edges; however it failed to complete the edges making object detection difficult. In Fig
(4.c), Marr-Hildreth detector is applied since it is susceptible to noise and gave a lot of false results. In Fig (4.d)
and (4.e), Sobel and Prewitt operators are used for recognizing edges that are horizontal or vertical and are
susceptible to noise. And Fig,(4.f) Canny edge detector is used which basically uses two thresholds which used
for detecting true weak edges, providing a better and fairly noise resistant output.[6]
3.3 BACKGROUND FRAME DIFFERENCING
This method is based on forming a precise background image and using it for separating moving objects
from their background. The background image is specified either manually, by taking an image without
vehicles, or is detected in real-time by forming a mathematical or exponential average of successive images. The
detection is then achieved by means of subtracting the reference image from the current image. Thresholding is
performed in order to obtain presence/absence information of an object in motion. The background can change
significantly with shadows cast by buildings and clouds, or simply due to changes in lighting conditions. With
these changing environmental conditions, the background frame is required to be updated regularly. There are
several background updating techniques. The most commonly used are averaging and selective updating. In
averaging, the background is built gradually by taking the average of the previous background with the current
frame. In selective updating, the background is replaced by the current frame only at regions with no motion
detected; where the difference between the current and the previous frames is smaller than a threshold. Selective
updating can be performed in a more robust averaging form, where the stationary regions of the background are
replaced by the average of the current frame and the previous background. [4, 6]
(a) (b) (c)
(d) (e) (f)
An Overview of Image processing for traffic applications
I nternational organization of Scientific Research 12 | P a g e
(a) Real-time image [6] (b) Background image[6]
(c) Subtracted image[6] (d) No. of vehicles = 3[6]
II. EMERGENCY VEHICLE DETECTION
Fig(5): Emergency vehicle detection[7]
The various steps of detection system are shown in following flow-chart. In case of normal regulation the
image is subjected to adaptive background subtraction, edge detection, and object counting methods. Using this,
the number of vehicles is calculated and traffic is regulated as per the congestion in each lane. [4,7]
An Overview of Image processing for traffic applications
I nternational organization of Scientific Research 13 | P a g e
2.1 FLOWCHART FOR EMERGENCY VEHICLE DETECTION
In case a red beacon is detected, the next step is to identify whether it is from an emergency vehicle or not.
This is done by identifying the blinking frequency of red light detected in the image sequence and comparing it
to the standard used by the emergency vehicles as shown in the above flow chart. This system will override the
normal regulation system and will change light to green till emergency vehicle is exited. Then system wiil start
running for normal regulation.
IV. CONCLUSION
In this paper, we have studied different parameters which are used in traffic scene analysis. Automatic
lane detection based on region and texture .In object detection we have studied Thersholding, Background
Subtraction, Boolean Edge Detector, Sobel & Prewitt operator and Canny Edge Detector . Of all studied
methods Canny Edge Detector is gives error free output even in noise and for weak signals .Thus Emergency
vehicle Detection can be well implementated using Canny Edge Detector which tracks the red beacon signal for
more accurate detection.
V. ACKNOWLEDGEMENT
The author would like to thank the following for valuable discussions related to this work: Prof. Poonam Sonar,
Prof. S.D.Patil and Prof. Deven Patel.
VI. REFERENCES
[1] V. Kastrinaki, M. Zervakis, K. Kalaitzakis A survey of video processing techniques for traffic
applications Image and Vision Computing 21 (2003) 359381. K.Compton, S.Hauck,
[2] Benjamin Coifmana, David Beymerb, Philip McLauchlanb, Jitendra MalikbA real-time computer vision
system for vehicle tracking and traffic surveillance Journal of Artificial Intelligence Research 3 (1995)
325348.Volume 6, Issue 4, August 1998, Pages 271288..
[3] B.D. Stewart, I. Reading, M.S. Thomson, T.D. Binnie, K.W.Dickinson, C.L. Wan, Adaptive lane finding
in road traffic image analysis, Proceedings of Seventh International Conference on Road Traffic
Monitoring and Control, IEE, London (2003).
Fig (6): Flowchart for emergency vehicle detection [7]
An Overview of Image processing for traffic applications
I nternational organization of Scientific Research 14 | P a g e
[4] Vikramaditya dangi by, Amol Parab, Kshitij Pawar & S.S Rathod Image processing based intelligent
traffic controller, Undergraduate Academic Research Journal (UARJ), ISSN : 2278 1129, Volume-1,
Issue-2, 2012.
[5] M. Fathy and M. Y. Siyal A window-based image processing technique for quantitative and qualitative
analysis of road traffic parameters
[6] M. Xie, L. Trassoudaine, J. Alizon, J. Gallice, Road obstacle detection and tracking by an active and
intelligent sensing strategy, Machine Vision and Applications 7 (1994) 165177.
[7] A. Broggi, S. Berte, Vision-based road detection in automotive systems: a real-time expectation-driven
approach, Journal of Artificial Intelligence Research 3 (1995) 325348.
[8] M. Bertozzi, A. Broggi, GOLD: a parallel real-time stereo vision system for generic obstacle and lane
detection, IEEE Transaction Image Processing 7 (1) (1998).
[9] Ahmed S. Salama, Bahaa K. Saleh, Mohamad M. Eassa, Intelligent Cross Road Traffic Management
System (ICRTMS), 2nd Int. Conf. on Computer Technology and Development, Cairo, Nov 2010, pp.
27-31.
[10] Y. Wu, F. Lian, and T. Chang, Traffic monitoring and vehicle tracking using roadside camera, IEEE
Int. Conf. on Robotics and Automation, Taipei, Oct 2006, pp. 4631 4636
[11] K. Wang, Z. Li, Q. Yao, W. Huang, and F. Wang, An automated vehicle counting system for traffic
surveillance, IEEE Int.Conf. on Vehicular Electronics and Safety, Japan, Dec 2007, pp. 1-6.
[12] K. Hang, Real-time image acquisition and processing system design based on DSP, The 2nd IEEE Int.
Conf. on Computer and Automation Engineering (ICCAE), Singapore, Feb 2010, pp. 492-496.
[13] B. Fazenda, H. Atmoko, F. Gu, L. Guan1 and A. Ball, Acoustic Based Safety Emergency Vehicle
Detection for Intelligent Transport Systems, ICCAS-SICE, Fukuoka, Aug 2009, pp.4250-4255.
Você também pode gostar
- Study On Lane Detection Applide Image ProcessingDocumento50 páginasStudy On Lane Detection Applide Image ProcessingMohd KasranAinda não há avaliações
- 3D Computer Vision: Efficient Methods and ApplicationsNo Everand3D Computer Vision: Efficient Methods and ApplicationsAinda não há avaliações
- 7415ijcsit06 PDFDocumento14 páginas7415ijcsit06 PDFnemeAinda não há avaliações
- Video Based Detection of Vehicle For Traffic Surveillance System Using Edge DetectionDocumento4 páginasVideo Based Detection of Vehicle For Traffic Surveillance System Using Edge DetectionInternational Journal of Application or Innovation in Engineering & ManagementAinda não há avaliações
- Night Time Vehicle Detection Using Tail Lights: A Survey: AbstractDocumento6 páginasNight Time Vehicle Detection Using Tail Lights: A Survey: AbstractAnonymous adBjxka4DAinda não há avaliações
- Development of Edge-Based Lane Detection AlgorithmDocumento4 páginasDevelopment of Edge-Based Lane Detection AlgorithmDuong DangAinda não há avaliações
- IJETR031551Documento6 páginasIJETR031551erpublicationAinda não há avaliações
- Jih MSP 2012 03 005Documento15 páginasJih MSP 2012 03 005DivyaSejekanAinda não há avaliações
- Traffic Surveillance System For Vehicle Detection Using Discrete Wavelet TransformDocumento13 páginasTraffic Surveillance System For Vehicle Detection Using Discrete Wavelet TransformFatima Azahrae NamossAinda não há avaliações
- Base-Image Segmentation and Region Classification in Automotive High-Resolution Radar ImageryDocumento14 páginasBase-Image Segmentation and Region Classification in Automotive High-Resolution Radar ImageryvishvcyberAinda não há avaliações
- Lane Detection Algorithm Based On Temporal-SpatialDocumento27 páginasLane Detection Algorithm Based On Temporal-SpatialSabari Selvam BAinda não há avaliações
- Detection of Indian Traffic SignDocumento6 páginasDetection of Indian Traffic SignIJSTEAinda não há avaliações
- Modern Mobile MappingDocumento12 páginasModern Mobile Mappingn.ragavendiranAinda não há avaliações
- 02.performance Evaluation of Watershed Segmentation Algorithm For Noisy and Noise Free Images Using Adaptive Thresholding and Masking MantapDocumento5 páginas02.performance Evaluation of Watershed Segmentation Algorithm For Noisy and Noise Free Images Using Adaptive Thresholding and Masking MantapbudiAinda não há avaliações
- Mobile Robot Monocular Vision Navigation Based On Road Region and Boundary EstimationDocumento8 páginasMobile Robot Monocular Vision Navigation Based On Road Region and Boundary EstimationArtur Faby Jimenez BonillaAinda não há avaliações
- A Method For Machine Readable Zones Location Based On A Combination of The Hough Transform and The Search For Feature PointsDocumento11 páginasA Method For Machine Readable Zones Location Based On A Combination of The Hough Transform and The Search For Feature Pointstraore falyAinda não há avaliações
- Traffic Sign Detection PaperDocumento24 páginasTraffic Sign Detection PaperMax UgrekhelidzeAinda não há avaliações
- Ieee Base PaperDocumento8 páginasIeee Base PaperraniAinda não há avaliações
- Sensors: Robust Traffic Light and Arrow Detection Using Digital Map With Spatial Prior Information For Automated DrivingDocumento24 páginasSensors: Robust Traffic Light and Arrow Detection Using Digital Map With Spatial Prior Information For Automated Drivingabu sf khanAinda não há avaliações
- Hiep SNAT R2 - FinalDocumento15 páginasHiep SNAT R2 - FinalTrần Nhật TânAinda não há avaliações
- Vision-Based Extrapolation of Road Lane Lines inDocumento4 páginasVision-Based Extrapolation of Road Lane Lines invenkat pAinda não há avaliações
- NFTDocumento35 páginasNFTdheydieAinda não há avaliações
- A Realtime Road Boundary Detection and Vehicle Detection For Indian RoadsDocumento11 páginasA Realtime Road Boundary Detection and Vehicle Detection For Indian RoadsHarmil PatelAinda não há avaliações
- Trafficsign - Sift With SVMDocumento5 páginasTrafficsign - Sift With SVMAnonymous womOJIWAinda não há avaliações
- Research of Lane Detection Method Based On Attention MechanismDocumento7 páginasResearch of Lane Detection Method Based On Attention MechanismkandarpAinda não há avaliações
- Literature SurveyDocumento7 páginasLiterature SurveyBalachandra MallyaAinda não há avaliações
- Multilevel Classification Scheme For AGV Perception: Naeem Ur Rehman Dr. Sohail Asghar Shahzad Rafiq Irfan Simon FongDocumento5 páginasMultilevel Classification Scheme For AGV Perception: Naeem Ur Rehman Dr. Sohail Asghar Shahzad Rafiq Irfan Simon FongBadr U ZamanAinda não há avaliações
- Feature Object Detection On The Urban Road Surface by The Application of Three Line Scanner ImageryDocumento6 páginasFeature Object Detection On The Urban Road Surface by The Application of Three Line Scanner Imagerybhavin_kapoorAinda não há avaliações
- Department of ECE, Canara Engineering College, MangaloreDocumento16 páginasDepartment of ECE, Canara Engineering College, MangaloreRanjan GowdaAinda não há avaliações
- 06 Avr PDFDocumento6 páginas06 Avr PDFrf_munguiaAinda não há avaliações
- Wavelet Based Marker-Controlled Watershed Segmentation Technique For High Resolution Satellite ImagesDocumento8 páginasWavelet Based Marker-Controlled Watershed Segmentation Technique For High Resolution Satellite ImagesImdad RizviAinda não há avaliações
- Obstacle Detection Using Hough Transform: Elated WorkDocumento4 páginasObstacle Detection Using Hough Transform: Elated WorkFloyd ClarkeAinda não há avaliações
- Lane Line Detection Using Hough Transform (Pipeling For Videos)Documento18 páginasLane Line Detection Using Hough Transform (Pipeling For Videos)Sourav DeyAinda não há avaliações
- A Review On Iot Based Energy Monitoring and Controlling SystemDocumento4 páginasA Review On Iot Based Energy Monitoring and Controlling SystemIJIERT-International Journal of Innovations in Engineering Research and TechnologyAinda não há avaliações
- Vehicle Detection Using Image Processing and Fuzzy Logic: International Journal of Computer Science & CommunicationDocumento3 páginasVehicle Detection Using Image Processing and Fuzzy Logic: International Journal of Computer Science & CommunicationcintemaniAinda não há avaliações
- Lane Tracking SystemDocumento5 páginasLane Tracking SystemKedarAinda não há avaliações
- Shadowed LaneDocumento7 páginasShadowed LaneAshutosh PandeyAinda não há avaliações
- An Image Processing Approach To Detect Lanes Pot HDocumento7 páginasAn Image Processing Approach To Detect Lanes Pot HSuhas NaikAinda não há avaliações
- Multi-Temporal Change Detection and Image Segmentation: Under Guidance Of: Dr. Anupam Agarwal SirDocumento19 páginasMulti-Temporal Change Detection and Image Segmentation: Under Guidance Of: Dr. Anupam Agarwal SirAshish MeenaAinda não há avaliações
- Literature Survey On Image Segmentation and Shape Analysis For Road-Sign RecognitionDocumento4 páginasLiterature Survey On Image Segmentation and Shape Analysis For Road-Sign RecognitionInternational Journal of Application or Innovation in Engineering & ManagementAinda não há avaliações
- Image Segmentation Using Discontinuity-Based Approach: Rajiv Kumar M.Arthanari M.SivakumarDocumento7 páginasImage Segmentation Using Discontinuity-Based Approach: Rajiv Kumar M.Arthanari M.SivakumarMohan Reddy KandiAinda não há avaliações
- IDRISS Multitemp2015Documento5 páginasIDRISS Multitemp2015Daniel Georgian PislaruAinda não há avaliações
- Alvarez Eccv 12Documento14 páginasAlvarez Eccv 12cseteanikoAinda não há avaliações
- Petrovskaya 2008 ISERDocumento13 páginasPetrovskaya 2008 ISERNguyen Quoc DoanAinda não há avaliações
- Image Segmentation Using Discontinuity Based ApproachDocumento7 páginasImage Segmentation Using Discontinuity Based Approach18H51A05C3-Ande Dheeraj Reddy B.Tech CSE (2018-22)Ainda não há avaliações
- Presented By: Arz Kumar Satsangi & Vineet VermaDocumento26 páginasPresented By: Arz Kumar Satsangi & Vineet VermagarunanarasAinda não há avaliações
- Police Eyes - Real World Automated Detection of Traffic ViolationsDocumento6 páginasPolice Eyes - Real World Automated Detection of Traffic ViolationsJim C. ValenciaAinda não há avaliações
- 2013 9 9 3659 3666Documento8 páginas2013 9 9 3659 3666sindhu bhargaviAinda não há avaliações
- Lane Detection Project ReportDocumento15 páginasLane Detection Project ReportDuong DangAinda não há avaliações
- Vertical Lane Line Detection Technology Based On Hough TransformDocumento7 páginasVertical Lane Line Detection Technology Based On Hough Transformpepethefrogg45Ainda não há avaliações
- Student AttendanceDocumento50 páginasStudent AttendanceHarikrishnan ShunmugamAinda não há avaliações
- Illuminant-Invariant Model-Based Road Segmentation: J.M. Alvarez, A. L Opez and R. BaldrichDocumento6 páginasIlluminant-Invariant Model-Based Road Segmentation: J.M. Alvarez, A. L Opez and R. Baldrichanamika kumariAinda não há avaliações
- Research Article: Real-Time Vehicle Detection Using Cross-Correlation and 2D-DWT For Feature ExtractionDocumento10 páginasResearch Article: Real-Time Vehicle Detection Using Cross-Correlation and 2D-DWT For Feature ExtractionazedAinda não há avaliações
- Sensors 22 08967 v2Documento22 páginasSensors 22 08967 v2cursito laliAinda não há avaliações
- Image Processing in Road Traf C AnalysisDocumento11 páginasImage Processing in Road Traf C AnalysisAshwiini Vigna BasuthkarAinda não há avaliações
- A Lane Tracking Method Based On Progressive Probabilistic Hough TransformDocumento13 páginasA Lane Tracking Method Based On Progressive Probabilistic Hough TransformGetz23Ainda não há avaliações
- Rekshma Seminar ReportDocumento37 páginasRekshma Seminar Reportrahulraj rAinda não há avaliações
- Edge Detection For Face Image Using Multiple FiltersDocumento14 páginasEdge Detection For Face Image Using Multiple Filterseditor ijeratAinda não há avaliações
- Analysis of Blur Measure Operators For Single Image Blur SegmentationDocumento32 páginasAnalysis of Blur Measure Operators For Single Image Blur Segmentationabhinav pachauriAinda não há avaliações
- MMSE Adaptive Receiver vs. Rake Receiver Performance Evaluation For UWB Signals Over Multipath Fading ChannelDocumento13 páginasMMSE Adaptive Receiver vs. Rake Receiver Performance Evaluation For UWB Signals Over Multipath Fading ChannelIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- The Experimental Study On The Compatibility Relationship of Polymer and Oil LayerDocumento5 páginasThe Experimental Study On The Compatibility Relationship of Polymer and Oil LayerIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- Application of The Multi-Curve Reconstruction Technology in Seismic InversionDocumento4 páginasApplication of The Multi-Curve Reconstruction Technology in Seismic InversionIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- Random Fixed Point Theoremsin Metric Space: Balaji R Wadkar, Ramakant Bhardwaj, Basantkumar SinghDocumento9 páginasRandom Fixed Point Theoremsin Metric Space: Balaji R Wadkar, Ramakant Bhardwaj, Basantkumar SinghIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- Study On Logging Interpretation Model and Its Application For Gaotaizi Reservoir of L OilfieldDocumento6 páginasStudy On Logging Interpretation Model and Its Application For Gaotaizi Reservoir of L OilfieldIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- Introduction To Accounting Professional Judgment ManipulationDocumento3 páginasIntroduction To Accounting Professional Judgment ManipulationIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- Effectiveness in Addressing The Sustainability and Environmental Issue Involving Use of Coal Ash As Partial Replacement of Cement in ConcreteDocumento6 páginasEffectiveness in Addressing The Sustainability and Environmental Issue Involving Use of Coal Ash As Partial Replacement of Cement in ConcreteIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- The Identification of Lithologic Traps in Nanpu Sag D3 Member of Gaonan RegionDocumento5 páginasThe Identification of Lithologic Traps in Nanpu Sag D3 Member of Gaonan RegionIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- "Sign Language Translator": Mr. Sangam Mhatre, Mrs. Siuli DasDocumento4 páginas"Sign Language Translator": Mr. Sangam Mhatre, Mrs. Siuli DasIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- Construction of Self-Regulated EFL Micro-Course Learning: Zhongwen LiuDocumento4 páginasConstruction of Self-Regulated EFL Micro-Course Learning: Zhongwen LiuIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- Strength Properties of Commercially Produced Clay Bricks in Six Different Locations/ States in NigeriaDocumento10 páginasStrength Properties of Commercially Produced Clay Bricks in Six Different Locations/ States in NigeriaIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- Modeling and Design of Hybrid Power Plants: Ahmed KH A. E. AlkhezimDocumento5 páginasModeling and Design of Hybrid Power Plants: Ahmed KH A. E. AlkhezimIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- Constructions Quality Versus Bad Components in Jordanian CementDocumento3 páginasConstructions Quality Versus Bad Components in Jordanian CementIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- Validating The Theories of Urban Crime in The City of RaipurDocumento10 páginasValidating The Theories of Urban Crime in The City of RaipurIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- The Research of Source System On Chang 6 Sand Formation in Ansai OilfieldDocumento5 páginasThe Research of Source System On Chang 6 Sand Formation in Ansai OilfieldIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- Detecting Spammers in Youtube: A Study To Find Spam Content in A Video PlatformDocumento5 páginasDetecting Spammers in Youtube: A Study To Find Spam Content in A Video PlatformIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- Genetic Analysis of Low Resistivity Reservoir: Gang Wang, Kai Shao, Yuxi CuiDocumento3 páginasGenetic Analysis of Low Resistivity Reservoir: Gang Wang, Kai Shao, Yuxi CuiIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- Assessment of The Life Quality of Urban Areas Residents (The Case Study of The City of Fahraj)Documento6 páginasAssessment of The Life Quality of Urban Areas Residents (The Case Study of The City of Fahraj)IOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- Bose-Einstein Condensation Controlled by (HOP+OLP) Trapping PotentialsDocumento5 páginasBose-Einstein Condensation Controlled by (HOP+OLP) Trapping PotentialsIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- Symbolism As A Modernist Featurein A Passage To India: Ahmad Jasim Mohammad, Suhairsaad Al-DeenDocumento4 páginasSymbolism As A Modernist Featurein A Passage To India: Ahmad Jasim Mohammad, Suhairsaad Al-DeenIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- Oil and Water Layer Identification by Dual-Frequency Resistivity LoggingDocumento4 páginasOil and Water Layer Identification by Dual-Frequency Resistivity LoggingIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- Yingtai Area in Songliao Basin As The Main Layer Tight Oil "Dessert" Reservoir PredictionDocumento4 páginasYingtai Area in Songliao Basin As The Main Layer Tight Oil "Dessert" Reservoir PredictionIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- Application of Cloud Transformation Technology in Predicting Reservoir PropertyDocumento4 páginasApplication of Cloud Transformation Technology in Predicting Reservoir PropertyIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- Characteristic of Cracks in Tight Sandstone Reservoir: Ming Yan Yunfeng Zhang Jie Gao Ji GaoDocumento4 páginasCharacteristic of Cracks in Tight Sandstone Reservoir: Ming Yan Yunfeng Zhang Jie Gao Ji GaoIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- Classification of Fault Condensed Belt and Faults Development Characteristics in Xingbei Region, Daqing PlacanticlineDocumento5 páginasClassification of Fault Condensed Belt and Faults Development Characteristics in Xingbei Region, Daqing PlacanticlineIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- Analysis of Distribution and Effection of Oil-Water: Yue FeiDocumento6 páginasAnalysis of Distribution and Effection of Oil-Water: Yue FeiIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAinda não há avaliações
- ICON Catalog LocationsDocumento16 páginasICON Catalog LocationsTools StuffsAinda não há avaliações
- Bloomberg - Transport - SecurityDocumento13 páginasBloomberg - Transport - SecurityFernandoAinda não há avaliações
- Wri Method FigDocumento15 páginasWri Method Figsoumyadeep19478425Ainda não há avaliações
- VX HX - 7 22 08Documento12 páginasVX HX - 7 22 08aaafafaAinda não há avaliações
- Brochure sp761lfDocumento10 páginasBrochure sp761lfkathy fernandezAinda não há avaliações
- Dnvgl-Ru-Ships (2015) Part 3 Ch-10 TrolleyDocumento7 páginasDnvgl-Ru-Ships (2015) Part 3 Ch-10 TrolleyyogeshAinda não há avaliações
- Properties of Building Materials and Their Importance in ConstructionDocumento5 páginasProperties of Building Materials and Their Importance in ConstructionDaisy Jane LulabAinda não há avaliações
- VAPORISERDocumento62 páginasVAPORISERAshish ChavanAinda não há avaliações
- CatalogDocumento76 páginasCatalogmkpasha55mpAinda não há avaliações
- UT TransducersDocumento20 páginasUT TransducersSamanyarak AnanAinda não há avaliações
- Internet Intranet ExtranetDocumento28 páginasInternet Intranet ExtranetAmeya Patil100% (1)
- ARMY TM 9-1804 Power Train Body Frame .25ton 4X4 Truck M38 Jul52Documento206 páginasARMY TM 9-1804 Power Train Body Frame .25ton 4X4 Truck M38 Jul52RockWagon100% (2)
- APP157 CoP For Site Supervision 2009 202109Documento92 páginasAPP157 CoP For Site Supervision 2009 202109Alex LeungAinda não há avaliações
- Us06-106 850 01 01 02 PDFDocumento6 páginasUs06-106 850 01 01 02 PDFF2CANALESAinda não há avaliações
- TRCM Safe Parking: Technical InformationDocumento2 páginasTRCM Safe Parking: Technical InformationMirek BudaAinda não há avaliações
- Moody DiagramDocumento18 páginasMoody DiagramWilson JustinoAinda não há avaliações
- ManpasandDocumento16 páginasManpasandJacob MathewAinda não há avaliações
- April 2016Documento68 páginasApril 2016Treatment Plant Operator MagazineAinda não há avaliações
- Quarter-Wave Impedance TransformerDocumento4 páginasQuarter-Wave Impedance TransformerEric SkinnerAinda não há avaliações
- SECTION 1213, 1214, 1215: Report By: Elibado T. MaureenDocumento19 páginasSECTION 1213, 1214, 1215: Report By: Elibado T. MaureenJohnFred CativoAinda não há avaliações
- Health Safety StatementDocumento22 páginasHealth Safety StatementShafiqul IslamAinda não há avaliações
- Furniture Catlog 2023 PDFDocumento90 páginasFurniture Catlog 2023 PDFBilal ToorAinda não há avaliações
- Green Line TransformerDocumento4 páginasGreen Line TransformerwakasAinda não há avaliações
- Electrochemical Technologies in Wastewater Treatment PDFDocumento31 páginasElectrochemical Technologies in Wastewater Treatment PDFvahid100% (1)
- DVMDocumento197 páginasDVMLeonardLapatratAinda não há avaliações
- Particle Swarm Optimization - WikipediaDocumento9 páginasParticle Swarm Optimization - WikipediaRicardo VillalongaAinda não há avaliações
- Uses of The Components of Crude Oil As FuelsDocumento6 páginasUses of The Components of Crude Oil As FuelsPearl LawrenceAinda não há avaliações
- Communicating With Instromet Q-Sonic Ultrasonic Gas FlowmetersDocumento13 páginasCommunicating With Instromet Q-Sonic Ultrasonic Gas Flowmeterssyed jeelani ahmedAinda não há avaliações
- Wastewater Treatment Options For Paper Mills Using Waste Paper/imported Pulps As Raw Materials: Bangladesh PerspectiveDocumento4 páginasWastewater Treatment Options For Paper Mills Using Waste Paper/imported Pulps As Raw Materials: Bangladesh PerspectiveKool LokeshAinda não há avaliações
- Interfacing Seven Segment Display With LPC1769Documento18 páginasInterfacing Seven Segment Display With LPC1769Gurudatta Palankar0% (1)
- Arizona, Utah & New Mexico: A Guide to the State & National ParksNo EverandArizona, Utah & New Mexico: A Guide to the State & National ParksNota: 4 de 5 estrelas4/5 (1)
- Japanese Gardens Revealed and Explained: Things To Know About The Worlds Most Beautiful GardensNo EverandJapanese Gardens Revealed and Explained: Things To Know About The Worlds Most Beautiful GardensAinda não há avaliações
- Naples, Sorrento & the Amalfi Coast Adventure Guide: Capri, Ischia, Pompeii & PositanoNo EverandNaples, Sorrento & the Amalfi Coast Adventure Guide: Capri, Ischia, Pompeii & PositanoNota: 5 de 5 estrelas5/5 (1)
- South Central Alaska a Guide to the Hiking & Canoeing Trails ExcerptNo EverandSouth Central Alaska a Guide to the Hiking & Canoeing Trails ExcerptNota: 5 de 5 estrelas5/5 (1)
- New York & New Jersey: A Guide to the State & National ParksNo EverandNew York & New Jersey: A Guide to the State & National ParksAinda não há avaliações