Escolar Documentos
Profissional Documentos
Cultura Documentos
Apuntes Ed1
Enviado por
Zarzamora MoradaTítulo original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Apuntes Ed1
Enviado por
Zarzamora MoradaDireitos autorais:
Formatos disponíveis
Apuntes de
Ecuaciones Diferenciales I
versin resumida del
Manual de Ecuaciones Diferenciales I de F. Finkel y A. Gonzlez-Lpez
Madrid, septiembre de 2010
ndice general
1 Ecuaciones diferenciales ordinarias 1
1.1 Aspectos generales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Mtodos elementales de integracin . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2.1 ,
0
= (.) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2.2 Ecuaciones de variables separadas . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.3 Ecuaciones homogneas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2.4 Ecuaciones exactas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2.5 Ecuaciones lineales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.2.6 Ecuacin de Bernoulli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.2.7 Ecuacin de Riccati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.3 Existencia y unicidad de soluciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.3.1 Ecuaciones autnomas de primer orden . . . . . . . . . . . . . . . . . . . . . . 19
2 Sistemas y ecuaciones lineales 23
2.1 Sistemas lineales de primer orden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.1.1 Espacio de soluciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.1.2 Matriz fundamental. Wronskiano . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.1.3 Frmula de AbelLiouville . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.1.4 Mtodo de variacin de constantes . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.2 Sistemas con coecientes constantes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.2.1 diagonalizable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.2.2 no diagonalizable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.2.3 Exponencial de una matriz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.2.4 Polinomio interpolador de Lagrange . . . . . . . . . . . . . . . . . . . . . . . . 39
2.3 Ecuaciones lineales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
2.3.1 Espacio de soluciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
2.3.2 Reduccin del orden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
2.3.3 Mtodo de variacin de constantes . . . . . . . . . . . . . . . . . . . . . . . . . 44
2.4 Ecuaciones con coecientes constantes. . . . . . . . . . . . . . . . . . . . . . . . . . . 46
2.4.1 Mtodo de los coecientes indeterminados . . . . . . . . . . . . . . . . . . . . 49
2.5 Estabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
2.5.1 Sistemas con coecientes constantes . . . . . . . . . . . . . . . . . . . . . . . . 55
2.5.2 Ecuaciones de orden n . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
2.5.3 Criterio de RouthHurwitz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3 Soluciones en forma de serie 61
3.1 Puntos regulares. Ecuaciones de Hermite y Legendre . . . . . . . . . . . . . . . . . . . 61
3.1.1 Puntos regulares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
3.1.2 La ecuacin de Hermite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
3.1.3 La ecuacin de Legendre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
3.2 Puntos singulares regulares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
i
ii NDICE GENERAL
3.2.1 La ecuacin de Bessel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4 Sistemas dinmicos en el plano 89
4.1 Resultados generales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
4.2 Sistemas lineales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
4.3 Sistemas no lineales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
Captulo 1
Ecuaciones diferenciales ordinarias
1.1 Aspectos generales
Una ecuacin diferencial es una relacin entre una funcin incgnita u de una variable x R
1
, un
nmero nito de derivadas parciales de u, y la propia variable x, que ha de cumplirse idnticamente en
cada punto de un abierto D R
1
.
Ejemplo 1.1. La ecuacin de Poisson
d
2
u(x)
d.
2
d
2
u(x)
d,
2
d
2
u(x)
dz
2
= j(x) . x (.. ,. z) .
donde j (que en electrosttica representa la densidad de carga) es una funcin conocida.
v En una ecuacin diferencial, tanto u como sus derivadas parciales deben evaluarse en el mismo
punto. Por ejemplo,
du(.. ,)
d.
u(. 3. ,) = 0
no es una ecuacin diferencial.
Una ecuacin diferencial donde la variable independiente x tiene varias componentes, es decir, donde x =
(.
1
. . . . . .
1
) con N > 1, se dice que es una ecuacin en derivadas parciales (EDP). En cambio, si N =
1 la ecuacin diferencial se dice que es ordinaria. En esta asignatura nos centraremos principalmente en
las ecuaciones diferenciales ordinarias, que deniremos ms formalmente a continuacin.
Denicin 1.2. Una ecuacin diferencial ordinaria (EDO) de orden n es una ecuacin de la forma
J
_
.. ,. ,
0
. . . . . ,
(n)
_
= 0 . (1.1)
donde J est denida en un abierto U R
nC2
y
JT
J,
.n/
= 0 en U. Una solucin de (1.1) es una funcin
u : R R derivable n veces en un intervalo abierto D R tal que
J
_
.. u(.). u
0
(.). . . . . u
(n)
(.)
_
= 0 . V. D . (1.2)
v La condicin
JT
J,
.n/
= 0 en U se impone para que la ecuacin sea verdaderamente de orden n.
Cuando sea posible despejar explcitamente la derivada de mayor orden de la ecuacin (1.1), es
decir, si podemos reescribirla como
,
(n)
=
_
.. ,. ,
0
. . . . . ,
(n1)
_
. (1.3)
diremos que la ecuacin est en forma normal.
1
2 ECUACIONES DIFERENCIALES ORDINARIAS
Ejemplo 1.3. La ecuacin
,
0
= k, . k > 0 . (1.4)
aparece al estudiar la desintegracin de un material radioactivo, donde , representa la masa del material
y . el tiempo.
Solucin: ntese que , = 0 es solucin de (1.4), mientras que si , = 0 se tiene
,
0
(.)
,(.)
= k ==
_
,
0
(.)
,(.)
d. = k
_
d. == log [,[ = k. c == [,[ = e
c
e
kx
== , = e
c
e
kx
.
siendo c una constante arbitraria. Por tanto, cualquier solucin de la ecuacin (1.4) es de la forma
, = ,
0
e
kx
. (1.5)
donde ,
0
es una constante arbitraria (en particular, si ,
0
= 0 se obtiene la solucin , = 0). Se dice que
la expresin (1.5) es la solucin general de la ecuacin (1.4).
v Ntese que la solucin general (1.5) de la ecuacin (1.4) depende de una constante arbitraria. La
solucin general de una ecuacin de orden n contiene n constantes arbitrarias.
1.2 Mtodos elementales de integracin
En esta seccin nos restringiremos al caso ms sencillo de las ecuaciones de primer orden. Supondremos
adems que la ecuacin puede escribirse en forma normal
,
0
= (.. ,) . (1.6)
Veremos a continuacin distintos mtodos elementales de integracin que permiten resolver a algunos
casos particulares importantes de la ecuacin (1.6).
1.2.1 ,
0
= (.)
Si suponemos que es continua en un intervalo abierto D, la ecuacin se resuelve simplemente inte-
grando ambos miembros a partir de un punto cualquiera .
0
D:
, =
_
x
x
0
(t ) dt c . c = ,(.
0
) . (1.7)
Utilizando la notacin de integral indenida, a menudo escribiremos la solucin como
, =
_
x
(t ) dt c . o incluso como , =
_
(.) d. c .
De la expresin (1.7) se sigue que el problema de valores iniciales
,
0
= (.) . ,(.
0
) = ,
0
tiene la solucin nica , =
_
x
x
0
(t ) dt ,
0
.
Mtodos elementales de integracin 3
1.2.2 Ecuaciones de variables separadas
Son ecuaciones de la forma
,
0
=
(.)
g(,)
. (1.8)
donde , g son continuas en sendos intervalos abiertos U, V , con g(,) = 0 para todo , V .
Solucin: Si ,(.) es solucin de la ecuacin (1.8), entonces
g
_
,(.)
_
,
0
(.) = (.) ==
_
x
x
0
g
_
,(s)
_
,
0
(s) ds =
_
x
x
0
(s) ds
==
tD,(x)
_
,(x)
,(x
0
)
g(t ) dt =
_
x
x
0
(s) ds
Por tanto, cualquier solucin de (1.8) satisface la ecuacin implcita
_
g(,) d, =
_
(.) d. c . (1.9)
donde c es una constante arbitraria. Recprocamente, derivando (1.9) respecto de . tomando a , como
funcin de ., concluimos que cualquier funcin ,(.) que satisfaga la relacin (1.9) es solucin de la
ecuacin (1.8). Por tanto (1.9) es la solucin general de (1.8).
La solucin general (1.9) de la ecuacin (1.8) est dada en la forma implcita
(.. ,) = c . donde (.. ,) =
_
g(,) d,
_
(.) d. . (1.10)
La relacin (.. ,) = c dene implcitamente una familia uniparamtrica de curvas en el plano, co-
rrespondiendo cada curva a un valor jo de c (si bien puede haber varias ramas con un mismo valor
de c). Estas curvas se denominan curvas integrales de la ecuacin (1.8). Por lo que acabamos de ver,
una funcin ,(.) es solucin de (1.8) si y slo si su grca est contenida en una curva integral de la
ecuacin.
La funcin dada por (1.10) es de clase C
1
(U V ) (ya que
J
Jx
= (.) y
J
J,
= g(,) son
continuas por hiptesis en U y V , respectivamente), y adems
J
J,
no se anula en ningn punto de U V .
Dado un punto (.
0
. ,
0
) de U V , la curva integral de (1.8) que pasa por dicho punto se obtiene tomando
c = (.
0
. ,
0
) en (1.10). Por el teorema de la funcin implcita, existe un entorno de (.
0
. ,
0
) donde
la relacin (1.10) dene una nica funcin derivable ,(.) tal que
i) ,(.
0
) = ,
0
.
ii)
_
.. ,(.)
_
=
_
.
0
. ,
0
). V. dom, .
En dicho entorno, la curva integral que pasa por (.
0
. ,
0
) es por tanto la grca de una solucin ,(.). Di-
cha funcin , es localmente (es decir, en un entorno del punto (.
0
. ,
0
)) la nica solucin de la ecuacin
diferencial (1.8) que satisface la condicin inicial ,(.
0
) = ,
0
. En otras palabras, el problema de valores
iniciales asociado a la ecuacin (1.8) posee solucin nica local si los datos iniciales (.
0
. ,
0
) pertenecen
a U V .
v El que la solucin general de la ecuacin de variables separadas (1.8) se exprese mediante una
relacin implcita (cf. (1.10)) no es una propiedad caracterstica de este tipo de ecuaciones. De
hecho, a lo largo de esta seccin veremos que en muchas ocasiones la solucin general de la
ecuacin de primer orden (1.6) tambin se expresa mediante una relacin implcita. En general no
ser posible despejar de ella , como funcin explcita de ., si bien normalmente el teorema de la
funcin implcita garantizar la existencia local de dicha funcin.
4 ECUACIONES DIFERENCIALES ORDINARIAS
Ejemplo 1.4. Consideremos la ecuacin de variables separadas
,
0
=
.
,
. (1.11)
En nuestra notacin, (.) = ., g(,) = ,, U = R, y o bien V = R
C
o bien V = R
, pero
no V = R, ya que la funcin g se anula cuando , = 0. Procediendo como antes (o bien utilizando
directamente la frmula (1.9)), se obtiene la solucin general de (1.11):
.
2
,
2
= c . c > 0 . (1.12)
Por tanto en este caso las curvas integrales son circunferencias de radio
_
c > 0 centradas en el origen
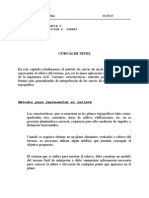
(ver Fig. 1.1). En particular, por cada punto del plano salvo el origen pasa una nica curva integral. Cada
curva integral contiene dos soluciones, dadas por las funciones
, =
_
c .
2
. . (
_
c.
_
c) . (1.13)
correspondiendo los signos a la eleccin V = R
. La ecuacin (1.11) no est denida para , = 0,
pero las soluciones (1.13) tienen lmite (cero) cuando .
_
c(aunque no son derivables en dichos
puntos, al tener pendiente innita). Ntese que por cada punto (.
0
. ,
0
) del plano con ,
0
= 0 pasa una
nica solucin. En cambio, la curva integral que pasa por un punto de la forma (.
0
. 0), con .
0
= 0, no
dene a , como funcin . en un entorno de dicho punto. Sin embargo, dicha curva s dene la funcin
.(,) = sgn .
0
_
.
2
0
,
2
, , ([.
0
[. [.
0
[), solucin de la ecuacin
.
0
=
,
.
. (1.14)
La ecuacin (1.14) se denomina ecuacin asociada a (1.11).
-3 -2 -1 1 2 3
-3
-2
-1
1
2
3
y
x
Figura 1.1: Curvas integrales de la ecuacin ,
0
= .,,. Cada curva integral contiene dos soluciones,
denidas en la ecuacin (1.13), representadas en azul y rojo en la gura.
v En general, la ecuacin asociada a la ecuacin diferencial (1.6) es
d.
d,
=
1
(.. ,)
. (1.15)
Evidentemente, las curvas integrales de la ecuacin asociada son las mismas que las de la ecuacin
de partida.
Mtodos elementales de integracin 5
Ejemplo 1.5. Consideremos ahora la ecuacin
,
0
=
1 ,
2
1 .
2
. (1.16)
que tambin es de variables separadas. En este caso (.) =
1
1Cx
2
y g(,) =
1
1C,
2
son continuas y g
nunca se anula, por lo que podemos tomar U = V = R. La ecuacin (1.16) se integra inmediatamente,
con el resultado
arctan , = arctan . c . (1.17)
donde [c[ < para que la ecuacin (1.17) tenga solucin en , para algn valor de .. Si c =
2
y
llamamos C = tan c, tomando la tangente en ambos miembros de (1.17) se llega a la siguiente expresin
para la solucin de (1.16):
, = tan(c arctan .) =
C .
1 C.
. (1.18)
Ntese que la constante C puede tomar cualquier valor real. Por otra parte, si c =
2
se tiene
, = tan
_
2
arctan .
_
= cot(arctan .) =
1
.
. . = 0 . (1.19)
Ntese que esta solucin se obtiene formalmente de (1.18) en el lmite C o.
-4 -2 2 4
-4
-2
2
4
x
y
Figura 1.2: Soluciones de la ecuacin ,
0
=
1C,
2
1Cx
2
.
El problema de valores iniciales asociado a la ecuacin (1.16) siempre posee solucin nica local.
Efectivamente, si imponemos la condicin inicial ,(.
0
) = ,
0
, de (1.18) concluimos que
C =
.
0
,
0
1 .
0
,
0
.
que tiene sentido salvo si ,
0
= 1,.
0
, en cuyo caso la solucin correspondiente es , = 1,..
v La nica solucin de la ecuacin (1.16) que est denida en toda la recta real es , = ., que
corresponde a C = 0. La solucin (1.19) y todas las dems soluciones (1.18) explotan para
algn valor nito de . (concretamente para . = 0 y . =
1
C
, respectivamente). Sin embargo,
el miembro derecho de la ecuacin (1.16) es continuo (de hecho de clase C
1
) en todo el plano.
En general, el estudio de las singularidades de la funcin (.. ,) no proporciona por s slo
informacin acerca de las posibles singularidades de las soluciones de la ecuacin diferencial (1.6).
6 ECUACIONES DIFERENCIALES ORDINARIAS
1.2.3 Ecuaciones homogneas
Son ecuaciones de la forma (1.6) con continua en un abierto U R
2
y homognea de grado cero, es
decir
(z.. z,) = (.. ,) . V.. , U. Vz = 0 . (1.20)
Este tipo de ecuacin se reduce a una de variables separadas mediante el cambio
, = .u . . = 0 .
donde u(.) es la nueva funcin incgnita. Efectivamente,
,
0
= u .u
0
= (.. .u) = (1. u) == u
0
=
(1. u) u
.
. (1.21)
Si z satisface la condicin (1. z) = z, entonces la ecuacin (1.21) tiene la solucin constante u = z,
que corresponde a , = z.. En caso contrario, la ecuacin (1.21) se resuelve separando variables e
integrando, lo que conduce a la relacin implcita
_
du
(1. u) u
= log [.[ c . con u =
,
.
. (1.22)
Ejemplo 1.6. Consideremos la ecuacin
,
0
=
, 2.
2, .
. (1.23)
Como
(.. ,) =
, 2.
2, .
es homognea de grado cero (y continua en todo el plano salvo en la recta , = .,2) nos encontramos
ante una ecuacin homognea. Es fcil comprobar que la ecuacin (1. z) = z no tiene soluciones
reales, por lo que ninguna recta por el origen es solucin de (1.23). Como
1
(1. u) u
=
2u 1
2(u
2
1)
.
la frmula (1.22) conduce inmediatamente a
log(1 u
2
) arctan u = c 2 log [.[ .
donde c es una constante arbitraria. Sustituyendo u por ,,. y simplicando, obtenemos la siguiente
expresin implcita para las curvas integrales de la ecuacin (1.23):
log(.
2
,
2
) arctan
,
.
= c . (1.24)
Ntese que en este caso no es posible despejar explcitamente , como funcin de .. Sin embargo, si
expresamos la relacin (1.24) en coordenadas polares
. = r cos 0 . , = r sen 0 .
obtenemos inmediatamente
2 log r 0 = c == r = Ce
0{2
: C = e
c{2
> 0 . (1.25)
Las curvas integrales son por tanto espirales donde la coordenada radial crece exponencialmente cuando
el ngulo gira en el sentido de las agujas del reloj.
Mtodos elementales de integracin 7
Para representar grcamente estas espirales es conveniente determinar primero las isoclinas de la
ecuacin (1.23). En general, una isoclina de la ecuacin de primer orden (1.6) es el lugar geomtrico de
los puntos en los cuales los vectores tangentes a las curvas integrales tienen todos una misma direccin.
Las isoclinas se denen por tanto mediante la ecuacin implcita
(.. ,) = m . m R m = o.
donde se admite que m = o para incluir las isoclinas de tangente vertical. Para la ecuacin (1.23) de
este ejemplo, la ecuacin de las isoclinas es
, 2.
2, .
= m. (1.26)
Por tanto, en este caso las isoclinas son rectas por el origen, siendo la de pendiente m
, =
m2
1 2m
. . (1.27)
En particular, las isoclinas de pendiente 0. o. 1. 1 son las rectas , = 2., , = .,2, , = 3.,
, = .,3, respectivamente. En la Fig. 1.3 hemos representado estas isoclinas junto con las espirales (1.25)
correspondientes a c = 0. ,2. . 3,2. Ntese que cada espiral contiene innitas soluciones de la
ecuacin (1.23), denida cada una de ellas en un intervalo de la forma (.
0
. .
1
), donde (.
0
. ,
0
) y (.
1
. ,
1
)
son dos puntos de corte consecutivos entre la espiral y la isoclina de pendiente innita , = .,2.
-6 -4 -2 2 4 6
-6
-4
-2
2
4
6
m=0
m=-1
m=
m=1
y
x
Figura 1.3: Curvas integrales de la ecuacin ,
0
=
,2x
2,Cx
(en rojo) e isoclinas de pendiente 0. o. 1. 1
(en gris).
1.2.4 Ecuaciones exactas
Una ecuacin diferencial de la forma
1(.. ,) Q(.. ,),
0
= 0 . (1.28)
donde 1. Q son funciones continuas en un abierto U R
2
y Q no se anula en U, se dice exacta si
existe una funcin J : U R que verica
1(.. ,) = J
x
(.. ,) . Q(.. ,) = J
,
(.. ,) . V(.. ,) U . (1.29)
8 ECUACIONES DIFERENCIALES ORDINARIAS
Es decir, la ecuacin (1.28) es exacta si (1. Q) = VJ en U. En este caso, si ,(.) es una solucin
de (1.28), podemos reescribir dicha ecuacin como
J
x
_
.. ,(.)
_
J
,
_
.. ,(.)
_
,
0
(.) =
d
d.
J
_
.. ,(.)
_
= 0 .
y por tanto las soluciones de la ecuacin exacta (1.28)-(1.29) verican
J(.. ,) = c . (1.30)
donde c es una constante. Recprocamente, si se cumple (1.30) entonces, al ser J
,
= Q no nula en U,
el teorema de la funcin implcita dene a , como funcin de . en un entorno de cada punto de U,
vericndose adems la ecuacin (1.28) de partida en el dominio de ,. Por tanto, la solucin general
de (1.28)-(1.29) est dada por la ecuacin (1.30), que dene las curvas de nivel de J.
En caso de que las funciones 1. Q sean de clase C
1
(U), una condicin necesaria para que la ecua-
cin (1.28) sea exacta es
1
,
(.. ,) = Q
x
(.. ,) . V(.. ,) U . (1.31)
ya que por el lema de Schwarz J
x,
= J
,x
en U. La condicin (1.31) es tambin suciente si el abierto
U es simplemente conexo
1
, que en las aplicaciones ser el caso ms usual.
Veamos cmo determinar la funcin J suponiendo que la condicin (1.31) se cumple en un rec-
tngulo abierto U = (a. b) (c. J). Sea (.
0
. ,
0
) un punto de U. Integrando la ecuacin J
x
= 1
obtenemos
J(.. ,) =
_
x
x
0
1(s. ,) ds g(,) . (1.32)
donde g depende slo de ,. Ntese que si (.. ,) U entonces todos las puntos de la forma (s. ,) con
s .
0
. .| .. .
0
| estn tambin en U, y por tanto la integral de la frmula anterior est bien denida.
Derivando parcialmente (1.32) respecto de , y utilizando (1.31) se sigue que
J
,
(.. ,) = g
0
(,)
_
x
x
0
1
,
(s. ,) ds = g
0
(,)
_
x
x
0
Q
x
(s. ,) ds = g
0
(,) Q(.. ,) Q(.
0
. ,) .
Imponiendo la segunda ecuacin J
,
= Q obtenemos
g
0
(,) = Q(.
0
. ,) == g(,) =
_
,
,
0
Q(.
0
. s) ds . (1.33)
salvo constante arbitraria. (Como antes, la integral de (1.33) est bien denida puesto que todos los
puntos (.
0
. s) estn en U si s ,
0
. ,| ,. ,
0
|.) Por tanto, en este caso la solucin general (1.30) de la
ecuacin (1.28) viene dada por
J(.. ,) =
_
x
x
0
1(s. ,) ds
_
,
,
0
Q(.
0
. s) ds = c . (1.34)
La funcin J de la ltima frmula puede tambin expresarse en forma ms compacta como la integral
de lnea
J(.. ,) =
_
;
0
(1. Q) dr . (1.35)
1
Recordemos que un abierto U R
2
es conexo si todo par de puntos de U pueden unirse mediante una curva continua
enteramente contenida en U. El abierto U es simplemente conexo si es conexo y toda curva cerrada continua contenida en U
puede deformarse de forma continua a un punto sin salirse de U. Intuitivamente, un abierto es simplemente conexo si consta
de un slo trozo y no tiene agujeros.
Mtodos elementales de integracin 9
U
a
b
c
d
.x; y/ .x
0
; y/
.x
0
; y
0
/
0
Figura 1.4: Caminos que unen (.
0
. ,
0
) con (.. ,) en U.
donde ;
0
es la curva quebrada de la Fig. 1.4. Como el rectngulo U es simplemente conexo y se cumple
la condicin (1.31), la integral de lnea del campo vectorial (1. Q) a lo largo de cualquier curva C
1
a
trozos contenida en U es independiente del camino seguido. Por tanto podemos escribir
J(.. ,) =
_
;
(1. Q) dr . (1.36)
donde ; es cualquier curva C
1
a trozos que vaya de (.
0
. ,
0
) a (.. ,) sin salirse de U (ver Fig. 1.4).
v De hecho, puede probarse que la frmula (1.36) es vlida en cualquier abierto simplemente conexo
donde se cumpla la condicin (1.31).
Ejemplo 1.7. Sea la ecuacin
2., 1 (.
2
,),
0
= 0 . (1.37)
que es de la forma (1.28) con 1 = 2., 1, Q = .
2
,. Como 1
,
= 2. = Q
x
, la ecuacin es exacta
en cualquiera de los abiertos simplemente conexos U
= {(.. ,) R
2
: , ? .
2
] donde Q no se
anula. Buscamos por tanto una funcin J tal que VJ = (1. Q), es decir
J
x
= 2., 1 == J = .
2
, . g(,)
J
,
= .
2
g
0
(,) = .
2
, == g
0
(,) = , == g(,) =
,
2
2
.
salvo una constante. Por tanto las curvas integrales de la ecuacin (1.37) verican la ecuacin implcita
2.
2
, 2. ,
2
= c . (1.38)
donde c es una constante arbitraria. Despejando , obtenemos dos expresiones
,
= .
2
_
.
4
2. c (1.39)
para cada valor de c (ver Fig. 1.5), donde el signo de la raz corresponde a la eleccin del abierto U
.
En ocasiones puede ser interesante discutir el comportamiento de las curvas integrales en funcin de la
constante arbitraria que aparece en la expresin de la solucin general. Por ejemplo, en este caso puede verse
que si c >
3
2
3
p
2
cada expresin ,
es una solucin de la ecuacin (1.37), denida en todo R. En cambio,
si c <
3
2
3
p
2
cada expresin ,
determina dos soluciones de dicha ecuacin, denidas en sendos intervalos
(o. .
0
) y (.
1
. o), donde .
0
< .
1
son las dos races del polinomio .
4
2.c que aparece en el radicando
de (1.39). Por ltimo, si c =
3
2
3
p
2
, cada expresin ,
tambin determina dos soluciones de (1.37), denidas
en los intervalos (o.
1
3
p
2
) y (
1
3
p
2
. o) respectivamente.
10 ECUACIONES DIFERENCIALES ORDINARIAS
-4 -2 2 4
-4
-2
2
4
y
x
Figura 1.5: Curvas integrales (1.38) de la ecuacin (1.37). La parbola , = .
2
(en gris) es una isoclina
de pendiente o, que divide al plano en dos abiertos simplemente conexos U
donde Q = .
2
, no se
anula y las soluciones son de la forma ,
, respectivamente.
Consideremos de nuevo la ecuacin (1.28) con 1. Q de clase C
1
(U). Supongamos que 1
,
= Q
x
en U y por tanto la ecuacin no es exacta. Si j(.. ,) es una funcin que no se anula en U, la ecuacin
j(.. ,)1(.. ,) j(.. ,)Q(.. ,),
0
= 0 (1.40)
es equivalente a la ecuacin (1.28), ya que ambas tienen el mismo conjunto de soluciones. Si la ecua-
cin (1.40) es exacta, se dice que la funcin j es un factor integrante de la ecuacin (1.28) de partida.
En este caso podemos resolver (1.28) integrando (1.40) mediante el procedimiento discutido ms arriba.
Si U es un abierto simplemente conexo, la condicin necesaria y suciente que debe cumplir j para
que la ecuacin (1.40) sea exacta es
(j1)
,
= (jQ)
x
.
Es decir, la funcin j debe ser solucin de la ecuacin en derivadas parciales de primer orden
1(.. ,) j
,
Q(.. ,) j
x
_
1
,
(.. ,) Q
x
(.. ,)
_
j = 0 . (1.41)
Aunque se demuestra que esta EDP siempre tiene solucin, el problema es que la tcnica habitual para
resolverla requiere conocer precisamente la solucin de la EDO (1.28) de partida. Sin embargo, podemos
buscar soluciones particulares de (1.41) que dependan de un nico argumento, tales como j(.), j(,),
j(. ,), j(.
2
,
2
), etc. En general estas funciones no sern solucin de la EDP (1.41), a menos que
1
,
Q
x
sea de alguna forma sencilla. Por ejemplo, si
1
,
Q
x
Q
g(.) . (1.42)
entonces (1.41) admite un factor integrante del tipo j(.). Efectivamente, si se cumple (1.42) y j
,
= 0,
la ecuacin (1.41) se reduce a
j
0
(.) = g(.)j(.) == j(.) = ce
_
g(.) d.
. (1.43)
Anlogamente, si
1
,
Q
x
1
h(,) . (1.44)
Mtodos elementales de integracin 11
entonces (1.41) admite como solucin el factor integrante dependiente slo de ,
j(,) = ce
_
h(,) d,
. (1.45)
Ejercicio. Probar que la ecuacin (1.28) posee un factor integrante j(r) funcin de r =
_
.
2
,
2
si y
slo si
1
,
Q
x
,1 .Q
= g(r) .
y que en tal caso j puede calcularse por la frmula
j(r) = c e
_
r g(r) dr
.
Ejemplo 1.8. La ecuacin
,(1 .) sen , (. cos ,),
0
= 0 . (1.46)
no es exacta, ya que 1 = ,(1 .) sen , , Q = . cos , no satisfacen la condicin (1.31). Sin
embargo, como
1
,
Q
x
Q
= 1 g(.)
no depende de ,, de la ecuacin (1.43) se sigue que j(.) = e
x
es un factor integrante de la ecua-
cin (1.46) en cualquiera de los abiertos simplemente conexos
U
= {(.. ,) R
2
: . cos , ? 0].
Buscamos por tanto una funcin J tal que VJ = e
x
(1. Q). En este caso resulta ms sencillo comenzar
integrando la ecuacin J
,
= e
x
Q, que proporciona
J
,
= e
x
(. cos ,) == J = e
x
(., sen ,) h(.)
J
x
= e
x
(, ., sen ,) h
0
(.) = e
x
_
,(1 .) sen ,
_
== h
0
(.) = 0 .
Por tanto podemos elegir
J(.. ,) = e
x
(., sen ,) .
de modo que las curvas integrales de la ecuacin (1.37) verican la ecuacin trascendente
e
x
(., sen ,) = c . (1.47)
donde c es una constante arbitraria. En este caso no es posible despejar explcitamente , como funcin
de . (aunque para c = 0 podemos despejar . como funcin de ,). Sin embargo, el teorema de la funcin
implcita garantiza que si J
,
(.
0
. ,
0
) = e
x
0
(.
0
cos ,
0
) = 0, es decir si (.
0
. ,
0
) U
, entonces la
ecuacin (1.47) dene a , como funcin de . en un entorno de (.
0
. ,
0
).
1.2.5 Ecuaciones lineales
Son ecuaciones de la forma
,
0
= a(.), b(.) . (1.48)
donde a y b son funciones continuas en un intervalo abierto U. La ecuacin (1.48) se dice homognea si
b 0, e inhomognea o completa en caso contrario. Veamos que la solucin general de una ecuacin
lineal puede expresarse siempre mediante cuadraturas. En efecto, en el caso homogneo
,
0
= a(.), (1.49)
12 ECUACIONES DIFERENCIALES ORDINARIAS
admite la solucin trivial , = 0, y si , = 0 podemos tratarla como una ecuacin de variables separadas:
,
0
,
= a(.) == log [,[ =
_
a(.) d. c
0
== [,[ = e
c
0
e
_
a(.) d.
.
La solucin general de (1.49) es por tanto
, = ce
_
a(.) d.
. (1.50)
donde c es una constante arbitraria (o bien c = e
c
0
, o bien c = 0 para la solucin trivial).
v El conjunto de soluciones (1.50) de la ecuacin homognea (1.49) es un espacio vectorial de
dimensin uno.
La ecuacin inhomognea (1.48) se resuelve mediante el mtodo de variacin de constantes, debido
a Lagrange. El mtodo consiste en probar como solucin una funcin de la forma
, = c(.)e
(x)
. (1.51)
donde
(.) =
_
a(.) d.
es un primitiva cualquiera (pero ja) de la funcin a(.). Es decir, se trata de probar como solucin la
solucin general de la ecuacin homognea reemplazando la constante c por una funcin incgnita c(.).
Sustituyendo (1.51) en la ecuacin (1.48) obtenemos
c
0
(.)e
(x)
c(.)e
(x)
a(.) = a(.)c(.)e
(x)
b(.) .
de donde
c
0
(.) = b(.)e
(x)
== c(.) = c
_
b(.)e
(x)
d. .
donde c es una constante arbitraria. Por tanto, la solucin general de la ecuacin completa (1.48) es
, = ce
(x)
e
(x)
_
b(.)e
(x)
d. . (1.52)
v La expresin (1.52) muestra que la solucin general de la ecuacin (1.48) es de la forma
, = ,
h
(.) ,
p
(.) .
donde ,
h
es la solucin general de la ecuacin homognea e ,
p
es una solucin particular de la
ecuacin completa.
Consideremos ahora el problema de valores iniciales
_
_
_
,
0
= a(.), b(.) .
,(.
0
) = ,
0
.
(1.53)
donde .
0
U. Tomando como primitiva de a(.) la funcin (.) =
_
x
x
0
a(s) ds, de la expresin (1.52)
se sigue inmediatamente que la nica solucin de (1.48) que verica la condicin inicial ,(.
0
) = ,
0
es
, = ,
0
e
_
x
x
0
a(s) ds
e
_
x
x
0
a(s) ds
_
x
x
0
b(s)e
_
x
x
0
a(t ) dt
ds .
Mtodos elementales de integracin 13
Ejemplo 1.9. Sea la ecuacin lineal inhomognea
,
0
=
,
.
.
2
. (1.54)
denida si . = 0. La solucin general de la ecuacin homognea es
,
0
,
=
1
.
== log [,[ = log [.[ c
0
== , = c. .
donde c R (el valor c = 0 proviene de la solucin trivial , 0). Para la ecuacin inhomognea,
probamos una solucin particular de la forma ,
p
= c(.)., que conduce a
,
0
p
= c
0
. c = c .
2
== c =
.
2
2
== ,
p
=
.
3
2
.
Por tanto, la solucin general de la ecuacin (1.54) es
, = c.
.
3
2
. c R.
Ntese que, aunque la ecuacin diferencial (1.54) no est denida si . = 0, las soluciones obtenidas son
analticas en toda la recta real.
1.2.6 Ecuacin de Bernoulli
Es una ecuacin de la forma
,
0
= a(.), b(.),
i
. r = 0. 1 . (1.55)
siendo a, b continuas en un intervalo abierto U. La ecuacin (1.55) no est denida para , < 0 a menos
que r = ,q sea un racional irreducible con q impar, ni para , = 0 cuando r < 0. La ecuacin de
Bernoulli puede transformarse en una ecuacin lineal (y por tanto resoluble por cuadraturas) mediante el
cambio de variable
u = ,
1i
.
En efecto, derivando u respecto de . y utilizando (1.55) obtenemos
u
0
= (1 r),
i
,
0
= (1 r)a(.),
1i
(1 r)b(.) = (1 r)a(.)u (1 r)b(.) .
que es lineal en la nueva variable u.
Ejemplo 1.10. La ecuacin
,
0
=
, ,
2
.
. (1.56)
es una ecuacin de Bernoulli con r = 2. Una posible solucin es , 0. Si , = 0, el cambio de variable
apropiado es u = 1,,, que conduce a
u
0
=
,
0
,
2
=
1
.,
1
.
=
u
.
1
.
. (1.57)
que es lineal en u. La solucin general de la ecuacin homognea es
u
h
=
c
.
.
Para la ecuacin completa, probamos una solucin particular de la forma u
p
=
c(x)
x
, que conduce a
c
0
.
=
1
.
== c = . == u
p
= 1 .
14 ECUACIONES DIFERENCIALES ORDINARIAS
Luego la solucin general de (1.57) es
u = u
h
u
p
=
. c
.
.
y por tanto
, =
.
. c
es la solucin general de (1.56). (La solucin , 0 se obtiene formalmente en el lmite c o.)
Ejercicio. Resolver la ecuacin (1.56) tratndola como ecuacin de variables separadas.
1.2.7 Ecuacin de Riccati
La ecuacin de Riccati
,
0
= a(.) b(.), c(.),
2
. a. c y 0 . (1.58)
con a, b, c continuas en un intervalo abierto U, es de gran importancia en Fsica Matemtica por su
estrecha relacin con las ecuaciones lineales de segundo orden (como la ecuacin de Schrdinger). En
general no es posible resolver una ecuacin de Riccati por cuadraturas. Sin embargo, si se conoce una
solucin particular ,
0
(.) es posible reducirla a una ecuacin lineal mediante el cambio de variable
u =
1
, ,
0
(.)
.
Efectivamente,
u
0
=
,
0
,
0
0
(.)
_
, ,
0
(.)
_
2
=
b(.)
_
, ,
0
(.)
_
c(.)
_
,
2
,
2
0
(.)
_
_
, ,
0
(.)
_
2
= b(.)u c(.)
, ,
0
(.)
, ,
0
(.)
=
_
b(.) 2c(.),
0
(.)
_
u c(.) .
que es una ecuacin lineal en u.
Ejemplo 1.11. Consideramos la ecuacin de Riccati
,
0
= ,
2
2
.
2
. (1.59)
Si probamos una solucin particular de la forma , = z,., obtenemos
z
.
2
=
z
2
.
2
2
.
2
== z
2
z 2 = 0 == z = 2. 1 .
Tomamos como solucin particular ,
0
= 1,.. El cambio de variable
u =
1
, 1,.
(1.60)
conduce a la ecuacin lineal
u
0
=
,
0
1,.
2
(, 1,.)
2
=
,
2
1,.
2
(, 1,.)
2
=
, 1,.
, 1,.
=
2u
.
1 . (1.61)
La solucin general de la ecuacin homognea es
u
h
=
C
.
2
.
Existencia y unicidad de soluciones 15
Para determinar una solucin particular de la ecuacin inhomognea (1.61) podemos utilizar el mtodo
de variacin de constantes, o ms directamente, probar una solucin de la forma u
p
= k.. Sustituyendo
en (1.61) se obtiene
k = 2k 1 == k =
1
3
.
Por tanto
u =
C
.
2
.
3
=
.
3
c
3.
2
. c = 3C .
es la solucin general de (1.61). De (1.60) se sigue inmediatamente que
, =
1
.
3.
2
.
3
c
.
es la solucin general de (1.59).
Comentario. Como hemos mencionado ms arriba, la ecuacin de Riccati (1.58) est estrechamente
relacionada con las ecuaciones lineales de segundo orden. Ms concretamente, es posible convertir (1.58)
en una ecuacin lineal de segundo orden mediante el cambio de variable
, =
1
c(.)
u
0
u
.
En efecto,
,
0
=
1
c(.)
u
00
u
c
0
(.)
c(.)
2
u
0
u
1
c(.)
u
02
u
2
= a(.)
b(.)
c(.)
u
0
u
1
c(.)
u
02
u
2
.
y por tanto u verica la ecuacin
u
00
_
b(.)
c
0
(.)
c(.)
_
u
0
a(.)c(.)u = 0 .
En el prximo captulo veremos que la solucin general de esta ecuacin es de la forma
u = k
1
u
1
(.) k
2
u
2
(.) .
donde k
1
, k
2
son constantes reales y u
1
, u
2
son dos soluciones linealmente independientes, que en
general no podrn determinarse de forma explcita. La solucin general de la ecuacin de Riccati de
partida (1.58) se expresa en trminos de u
1
y u
2
como
, =
1
c(.)
k
1
u
0
1
(.) k
2
u
0
2
(.)
k
1
u
1
(.) k
2
u
2
(.)
.
(Ntese que esta solucin depende de una sla constante arbitraria, o bien k
2
,k
1
, o bien k
1
,k
2
.)
1.3 Existencia y unicidad de soluciones
En esta seccin estudiaremos la existencia y unicidad de solucin del problema de valores iniciales
_
,
0
= (.. ,) .
,(.
0
) = ,
0
.
(1.62)
En distintos ejemplos de la seccin anterior donde la funcin era sucientemente regular hemos visto
que este problema tiene solucin nica local. En esta seccin enunciaremos sin demostracin un resultado
fundamental que garantiza la existencia de solucin nica (en general local) del problema de valores
iniciales (1.62). Supondremos que la variable dependiente , y la funcin son vectoriales
2
, es decir,
consideraremos el problema de valores iniciales para sistemas de ecuaciones de primer orden:
2
De aqu en adelante prescindiremos de la notacin vectorial, e.g., escribiremos simplemente , en lugar de y.
16 ECUACIONES DIFERENCIALES ORDINARIAS
Denicin 1.12. Un sistema de n ecuaciones diferenciales ordinarias de primer orden en forma
normal para una funcin incgnita , = (,
1
. . . . . ,
n
) es una ecuacin vectorial del tipo
,
0
= (.. ,) . (1.63)
donde = (
1
. . . . .
n
) est denida en un abierto U R
nC1
y toma valores en R
n
. Dado (.
0
. ,
0
)
U, el problema de valores iniciales asociado al sistema (1.63) consiste en determinar una solucin ,(.)
denida en un intervalo 1 que contenga a .
0
tal que
,(.
0
) = ,
0
. (1.64)
v El sistema (1.63) es equivalente a las n ecuaciones escalares
,
0
1
=
1
(.. ,
1
. . . . . ,
n
) .
.
.
.
,
0
n
=
n
(.. ,
1
. . . . . ,
n
) .
mientras que el dato inicial (1.64) corresponde a las n condiciones
,
1
(.
0
) = ,
01
. . . . . ,
n
(.
0
) = ,
0n
.
v El problema de valores iniciales (1.63)(1.64) incluye como caso particular el problema de valores
iniciales asociado a una ecuacin escalar de orden n en forma normal
_
u
(n)
= J
_
.. u. u
0
. . . . . u
(n1)
_
.
u(.
0
) = u
0
. u
0
(.
0
) = u
1
. . . . . u
(n1)
(.
0
) = u
n1
.
(1.65)
En efecto, si introducimos las n variables dependientes
,
1
= u. ,
2
= u
0
. . . . . ,
n
= u
(n1)
.
el problema de valores iniciales (1.65) puede reescribirse como el sistema de ecuaciones de primer
orden
,
0
1
= ,
2
.
.
.
.
,
0
n1
= ,
n
.
,
0
n
= J(.. ,
1
. . . . . ,
n
) .
con la condicin inicial
,
1
(.
0
) = u
0
. ,
2
(.
0
) = u
1
. . . . . ,
n
(.
0
) = u
n1
.
(Ms en general, un sistema de m ecuaciones diferenciales ordinarias de orden n puede convertirse
en un sistema de mn ecuaciones de primer orden.)
La existencia local de soluciones del problema de valores iniciales (1.63)(1.64) est garantizada si
la funcin es continua en su abierto de denicin, de acuerdo con el siguiente teorema:
Existencia y unicidad de soluciones 17
x
0
x
0
C x
0
y
0
U
Figura 1.6: Si la funcin (.. ,) satisface las hiptesis del teorema de existencia y unicidad en el abierto
sombreado U, el problema de valores iniciales (1.63)(1.64) tiene solucin nica denida en el intervalo
(.
0
. .
0
). No est garantizado que la solucin est denida o sea nica fuera del abierto U.
Teorema de existencia de Peano. Sea : U R
n
continua en el abierto U R
nC1
, y sea
(.
0
. ,
0
) U. Entonces el problema (1.63)(1.64) tiene (al menos) una solucin ,(.) denida en un
intervalo de la forma (.
0
. .
0
), para > 0 sucientemente pequeo.
v El nmero , que es funcin de (.
0
. ,
0
), se puede estimar explcitamente, y depende esencialmente
de lo grande que sea el valor de [(.. ,)[ en U.
La continuidad de la funcin en el abierto U no garantiza la unicidad (ni siquiera local) de soluciones
del problema de valores iniciales (1.63)(1.64) con datos iniciales en U, tal y como ilustra el siguiente
ejemplo:
Ejemplo 1.13. Sea el problema de valores iniciales
_
,
0
= 3,
2{3
.
,(.
0
) = ,
0
.
(1.66)
Como (.. ,) = 3,
2{3
es continua en U = R
2
, el teorema de Peano garantiza que el problema (1.66)
posee al menos una solucin local cualquiera que sea el dato inicial (.
0
. ,
0
). Veamos que si ,
0
= 0 la
solucin no es nica. En efecto, , 0 es una solucin del problema (1.66) cuando ,
0
= 0. Por otro
lado, como la ecuacin ,
0
= 3,
2{3
es de variables separadas podemos integrarla inmediatamente, con
el resultado
, = (. c)
3
. c R. (1.67)
En particular, , = (. .
0
)
3
es otra solucin de (1.66) con ,
0
= 0, que diere de , 0 en cualquier
intervalo abierto centrado en .
0
.
El resultado fundamental que aplicaremos para establecer la existencia y unicidad local de soluciones
del problema de valores iniciales (1.63)-(1.64) es el siguiente:
Teorema de existencia y unicidad. Si la funcin : U R
nC1
R
n
y sus derivadas parciales
J(
i
J,
j
(1 6 i. 6 n) son continuas en el abierto U, entonces para todo (.
0
. ,
0
) U el problema de
valores iniciales (1.63)(1.64) tiene solucin nica en un intervalo de la forma (.
0
. .
0
), con
> 0 dependiente de (.
0
. ,
0
).
18 ECUACIONES DIFERENCIALES ORDINARIAS
El teorema anterior es consecuencia de un resultado ms general, conocido como teorema de Picard
Lindelf, cuyo enunciado y demostracin detallada puede verse por ejemplo en F. Finkel y A. Gonzlez-
Lpez, Manual de Ecuaciones Diferenciales I, UCM, 2009
3
. En muchas ocasiones, utilizaremos el si-
guiente corolario directo del teorema de existencia y unicidad:
Corolario 1.14. Si : U R
nC1
R
n
es de clase C
1
en el abierto U, el problema de valores
iniciales (1.63)(1.64) tiene solucin nica local para todo dato inicial (.
0
. ,
0
) U.
v Si se cumplen las hiptesis del teorema de existencia y unicidad (o de su Corolario 1.14), entonces
ninguna solucin puede cortar a otra solucin dentro de U, ya que en caso contrario habra dos
soluciones con el mismo dato inicial en U (ver Fig. 1.6).
v Las hiptesis del teorema de existencia y unicidad no son ni mucho menos necesarias para que el
problema de valores iniciales (1.63)(1.64) tenga solucin nica. Por ejemplo, la funcin
(.. ,) =
2,
.
4. . . = 0 .
0 . . = 0 .
es discontinua en el eje vertical . = 0. Como la ecuacin ,
0
= (.. ,) es lineal, se resuelve
fcilmente con el resultado
, =
c
.
2
.
2
.
Por tanto, la ecuacin diferencial ,
0
= (.. ,) con la condicin inicial ,(0) = 0 tiene la solucin
nica , = .
2
, correspondiente a c = 0. En cambio, si la condicin inicial es ,(0) = ,
0
= 0, el
problema de valores iniciales no tiene solucin, ya que la nica solucin de la ecuacin diferencial
denida para . = 0 es , = .
2
.
Ejemplo 1.15. Dada la ecuacin diferencial
,
0
=
,
2
2.(, .)
. (1.68)
estudiemos por qu puntos del plano pasa una nica curva integral de la ecuacin (1.68). En primer lugar,
ntese que la funcin
(.. ,) =
,
2
2.(, .)
es de clase C
1
en todo el plano excepto en las rectas . = 0, , = .. Por el teorema de existencia y
unicidad, por todo punto (.
0
. ,
0
) R
2
que no pertenezca a dichas rectas pasa una nica solucin, y por
tanto una nica curva integral. Para ver qu ocurre cuando el dato inicial (.
0
. ,
0
) pertenece a las rectas
. = 0 , = ., consideramos la ecuacin asociada
d.
d,
=
2.(, .)
,
2
.
cuyas curvas integrales coinciden con las de la ecuacin de partida. Al ser el miembro derecho de esta
ecuacin de clase C
1
en todo el plano salvo en la recta , = 0, del teorema de existencia y unicidad se
deduce que por todo punto de las rectas . = 0 , = . salvo el origen pasa una nica curva integral
de la ecuacin (1.68) (con tangente vertical). De hecho, es inmediato comprobar que la recta . = 0 es
una curva integral, al ser claramente solucin de la ecuacin asociada. (Ntese, sin embargo, que la recta
, = . no es una curva integral.)
El nico punto del plano donde el teorema de existencia y unicidad no puede aplicarse ni a la ecuacin
de partida ni a su asociada es el origen. Para estudiar el comportamiento de las curvas integrales por este
3
A partir de ahora citaremos abreviadamente esta referencia como [EDI2009].
Existencia y unicidad de soluciones 19
punto no hay ms remedio que resolver la ecuacin diferencial, que en este caso es posible al tratarse de
una ecuacin homognea. Efectuando el cambio , = .u en la ecuacin se obtiene
.u
0
u =
u
2
2(u 1)
== .u
0
=
u(2 u)
2(u 1)
.
Esta ltima ecuacin admite las soluciones particulares u = 0, u = 2, que corresponden a las soluciones
lineales , = 0 e , = 2.. Si u = 0. 2, resolviendo la ecuacin para u separando variables se obtiene
_
2u 2
u
2
2u
du = log [u
2
2u[ = log [.[ c
0
== u(u 2) =
c
.
. c R.
Deshaciendo el cambio se llega a la expresin
,(, 2.) = c. .
que incluye las soluciones particulares , = 0, , = 2. para c = 0. Como la ecuacin anterior se satisface
idnticamente para . = , = 0 y c arbitrario, todas las curvas integrales tienen una rama que pasa por
el origen. En denitiva, por todo punto del plano salvo el origen pasa una nica curva integral, mientras
que por el origen pasan innitas (cf. la Fig. 1.7).
2 1 1 2
2
1
1
2
Figura 1.7: Curvas integrales de la ecuacin (1.68).
1.3.1 Ecuaciones autnomas de primer orden
En este apartado veremos algunas propiedades generales de las ecuaciones autnomas de primer orden
,
0
= (,) . (1.69)
donde supondremos que : R R tiene derivada continua en toda la recta real. El teorema de
existencia y unicidad implica entonces que el problema de valores iniciales asociado a la ecuacin (1.69)
tiene solucin nica local para cualquier dato inicial (.
0
. ,
0
) R
2
(es decir, por cada punto del plano
pasa una nica solucin). Como la ecuacin (1.69) es de variables separadas su solucin es inmediata:
_
d,
(,)
= . c . (1.70)
donde se supone que (,) no se anula en el intervalo de integracin. Veamos a continuacin algunas
propiedades generales de las soluciones de la ecuacin autnoma (1.69):
20 ECUACIONES DIFERENCIALES ORDINARIAS
Proposicin 1.16. Sea la ecuacin ,
0
= (,), siendo : R R de clase C
1
(R).
i) Si ,(.) es solucin y a R, entonces ,(. a) tambin es solucin.
ii) Si a R satisface (a) = 0, entonces la funcin constante ,(.) = a es solucin.
iii) Las isoclinas son rectas horizontales.
iv) Toda solucin es constante o estrictamente montona.
v) Toda solucin acotada para . > .
0
(resp. . 6 .
0
) tiende a una solucin constante cuando
. o(resp. . o).
Demostracin.
i) Si z(.) = ,(. a), entonces z
0
(.) = ,
0
(. a) =
_
,(. a)
_
=
_
z(.)
_
.
ii) Evidente.
iii) Evidente.
iv) Si ,(.) es solucin e ,
0
(.
0
) = 0 para algn .
0
R, entonces
_
,(.
0
)
_
= 0. De la unicidad de
la solucin se sigue que ,(.) = ,(.
0
) es una solucin constante. Por tanto, si una solucin no es
constante su derivada no se anula, ni puede cambiar de signo al ser ,
0
(.) =
_
,(.)
_
una funcin
continua.
v) Probemos la armacin en el caso . o. Sea ,(.) una solucin acotada para todo . > .
0
. Si
, es constante la armacin es trivial. En caso contrario ,(.) es estrictamente montona, y al ser
acotada existe lim
x!1
,(.) a. Como es continua, se tiene
lim
x!1
_
,(.)
_
= (a) = lim
x!1
,
0
(.) .
Si fuera (a) > 0, entonces por denicin de lmite existe .
1
> .
0
tal que
,
0
(.) >
(a)
2
. V. > .
1
.
Integrando esta relacin entre .
1
y ., obtenemos
,(.) > ,(.
1
)
(a)
2
(. .
1
) . V. > .
1
.
Luego ,(.) no estara acotada para todo . > .
0
, en contra de la hiptesis. Anlogamente se
demuestra que no puede ser (a) < 0. Luego (a) = 0, y por tanto ,(.) tiende a la solucin
constante z(.) = a cuando . o. La demostracin para el caso . oes similar.
Ejemplo 1.17. Consideramos el problema de valores iniciales
_
,
0
= ,(, 1) .
,(.
0
) = ,
0
.
(1.71)
Las soluciones constantes de la ecuacin autnoma son los ceros de la funcin (,) ,(, 1), es
decir , = 0 e , = 1. Si ,
0
< 0 ,
0
> 1, las correspondientes soluciones son montonas crecientes, ya
que en ambos casos se tiene ,
0
(.
0
) =
_
,(.
0
)
_
= (,
0
) > 0 y la derivada no puede cambiar de signo.
En cambio, si 0 < ,
0
< 1 las correspondientes soluciones son montonas decrecientes (ver Fig. 1.8).
Las soluciones con ,
0
> 1 no estn acotadas superiormente a la derecha de .
0
, puesto que en caso
contrario deberan tender a una solucin constante , = a con a > ,
0
> 1. En cambio estas soluciones
estn acotadas por ,
0
a la izquierda de .
0
, y por tanto tienden a la solucin constante , = 1 cuando
. o. Anlogamente, las soluciones con ,
0
< 0 no estn acotadas a la izquierda de .
0
, mientras
que tienden a la solucin constante , = 0 cuando . o. Por ltimo, las soluciones con ,
0
(0. 1)
tienden a la solucin constante , = 0 (resp. , = 1) cuando . o(resp. . o). Adems, como
Existencia y unicidad de soluciones 21
-4 -2 2 4
-3
-2
-1
1
2
3
4
y
x
Figura 1.8: Soluciones (1.72) de la ecuacin autnoma (1.71) para distintos datos iniciales (en rojo). En
azul se representan las soluciones constantes , = 0 e , = 1.
,
00
= (2, 1),
0
estas ltimas soluciones tienen un punto de inexin cuando cortan a la recta , = 1,2
(ver Fig. 1.8).
La solucin del problema de valores iniciales (1.71) se calcula fcilmente utilizando (1.70), con el
resultado
,(.) =
,
0
,
0
(1 ,
0
)e
xx
0
. (1.72)
Si ,
0
> 1, entonces ,
0
< 1 ,
0
< 0 y por tanto la solucin (1.72) explota para un cierto .
1
> .
0
. Si
0 < ,
0
< 1, el denominador del miembro derecho de (1.72) es claramente positivo y la solucin (1.72)
est denida en toda la recta real (como ya sabamos). Por ltimo, si ,
0
< 0 entonces 1 ,
0
> [,
0
[ y
por tanto (1.72) explota para algn .
1
< .
0
.
22 ECUACIONES DIFERENCIALES ORDINARIAS
Captulo 2
Sistemas y ecuaciones lineales
2.1 Sistemas lineales de primer orden
2.1.1 Espacio de soluciones
Denicin 2.1. Un sistema lineal de primer orden es un sistema de n ecuaciones de la forma
,
0
= (.) , b(.) . (2.1)
donde : R M
n
(R) es una funcin matricial y b : R R
n
es una funcin vectorial, es decir,
(.) =
a
11
(.) . . . a
1n
(.)
.
.
.
.
.
.
.
.
.
a
n1
(.) . . . a
nn
(.)
. b(.) =
b
1
(.)
.
.
.
b
n
(.)
. (2.2)
El sistema (2.1) se dice homogneo si b 0, e inhomogneo en caso contrario.
v El conjunto M
n
(R) de las matrices cuadradas de orden n con elementos de matriz reales es un es-
pacio vectorial de dimensin n
2
. La base cannica de dicho espacio es la formada por las matrices
1
i}
cuyo nico elemento de matriz no nulo es un 1 en la la i y la columna . Las coordenadas de
una matriz en esta base son sus elementos de matriz a
i}
.
v Recurdese que una funcin vectorial b : R R
n
es continua en . R si y slo si lo son sus
componentes b
i
: R R. Anlogamente, una funcin matricial : R M
n
(R) es continua en
. R si y slo si sus n
2
elementos de matriz a
i}
: R R son funciones continuas en ..
Por el teorema de existencia y unicidad visto en el captulo anterior, si la funcin matricial y la
funcin vectorial b son continuas en un intervalo abierto 1, entonces el problema de valores iniciales
_
,
0
= (.) , b(.) .
,(.
0
) = ,
0
(2.3)
asociado al sistema lineal (2.1) tiene solucin nica local para todo dato inicial (.
0
. ,
0
) 1 R
n
.
De hecho, puede probarse el siguiente resultado ms general, cuya demostracin puede consultarse en
[EDI2009]:
Teorema 2.2. Si : 1 M
n
(R) y b : 1 R
n
son continuas en un intervalo cualquiera 1 R,
entonces el problema de valores iniciales (2.3) tiene solucin nica denida en todo el intervalo 1
para cualquier dato inicial (.
0
. ,
0
) 1 R
n
.
23
24 SISTEMAS Y ECUACIONES LINEALES
En lo que sigue supondremos que las funciones y b del sistema lineal (2.1)-(2.2) son continuas
en un intervalo 1 R, y por tanto se cumplen las hiptesis del Teorema 2.2. Denotaremos por S el
conjunto de soluciones del sistema (2.1), es decir,
S =
, : 1 R
n
[ ,
0
(.) = (.),(.) b(.) . V. 1
_
C
1
(1. R
n
) .
Anlogamente, llamaremos S
0
al conjunto de soluciones del correspondiente sistema homogneo
,
0
= (.) , . (2.4)
v Si
1
.
2
son dos soluciones del sistema homogneo (2.4), entonces cualquier combinacin lineal
z
1
j
2
con coecientes z. j R sigue siendo solucin. En efecto,
(z
1
j
2
)
0
(.) = z
10
(.)j
20
(.) = z(.)
1
(.)j(.)
2
(.) = (.)
_
z
1
(.)j
2
(.)
_
.
En otras palabras, el conjunto S
0
de soluciones del sistema homogneo (2.4) es un espacio vecto-
rial real. Esta importante propiedad de los sistemas lineales homogneos se conoce como princi-
pio de superposicin lineal.
v La solucin general del sistema inhomogneo (2.1) es de la forma , = ,
p
,
h
, donde ,
p
es una
solucin particular ja de dicho sistema e ,
h
es la solucin general del correspondiente sistema
homogneo (2.4). En efecto, si , es de la forma anterior es claramente solucin de (2.1). Rec-
procamente, si , es cualquier solucin de dicho sistema, entonces , ,
p
es obviamente solucin
del sistema homogneo (2.4). En lenguaje ms matemtico, el conjunto de soluciones del sistema
inhomogneo (2.1) es el espacio afn S = ,
p
S
0
. donde ,
p
es un elemento jo de S.
A partir del Teorema 2.2 de existencia y unicidad, probaremos a continuacin que la dimensin del
espacio de soluciones S
0
del sistema homogneo (2.4) es precisamente n:
Teorema 2.3. El conjunto de soluciones del sistema homogneo ,
0
= (.), , con , R
n
, es un
espacio vectorial real de dimensin n.
Demostracin. Sea .
0
1 un punto jo pero arbitrario de 1, y sea e
i
el i -simo vector de la base
cannica de R
n
. Veamos en primer lugar que, si denotamos por Y
i
(.) a la solucin del problema de
valores iniciales
_
,
0
= (.), .
,(.
0
) = e
i
.
(2.5)
las funciones {Y
1
(.). . . . . Y
n
(.)] constituyen un sistema de generadores del espacio vectorial S
0
. Sea,
en efecto, ,(.) una solucin cualquiera del sistema homogneo (2.4), y llamemos
,
0
= ,(.
0
) (,
01
. . . . . ,
0n
) =
n
iD1
,
0i
e
i
.
Entonces la funcin
,(.) =
n
iD1
,
0i
Y
i
(.)
es solucin del sistema homogneo (2.4) (al ser combinacin lineal de soluciones) y satisface la condi-
cin inicial
,(.
0
) =
n
iD1
,
0i
e
i
= ,
0
= ,(.
0
) .
Sistemas lineales de primer orden 25
Del Teorema (2.2) de existencia y unicidad se sigue que , = , en 1. Luego toda solucin es combinacin
lineal de las n soluciones Y
i
, que constituyen por tanto un sistema de generadores de S
0
. Veamos que de
hecho las n soluciones Y
i
son linealmente independientes, por lo que forman una base de S
0
. En efecto,
supongamos que
n
iD1
z
i
Y
i
= 0 .
con z
1
. . . . . z
n
constantes reales. La igualdad anterior es equivalente a
n
iD1
z
i
Y
i
(.) = 0 . V. 1 .
de donde se sigue que
n
iD1
z
i
Y
i
(.
0
) =
n
iD1
z
i
e
i
= 0 .
que slo tiene la solucin trivial z
1
= = z
n
= 0 al ser {e
1
. . . . . e
n
] una base de R
n
. Esto demuestra
que {Y
1
. . . . . Y
n
] es una base de S
0
, y por tanto dimS
0
= n.
2.1.2 Matriz fundamental. Wronskiano
Denicin 2.4. Un sistema fundamental de soluciones del sistema homogneo (2.4) es una base
{,
1
. . . . . ,
n
] de su espacio de soluciones.
Por ejemplo, las n soluciones Y
i
del problema de valores iniciales (2.5) forman un sistema fundamental
de soluciones del sistema homogneo ,
0
= (.),. Ntese que, por construccin, dichas soluciones
verican Y
i
(.
0
) = e
i
.
Por denicin, cualquier solucin ,(.) del sistema homogneo (2.4) es combinacin lineal de los
elementos de un sistema fundamental de soluciones {,
1
. . . . . ,
n
], es decir,
,(.) =
n
iD1
c
i
,
i
(.) . . 1 . (2.6)
para ciertas constantes reales c
1
. . . . . c
n
. La igualdad vectorial (2.6) es equivalente a las n igualdades
escalares
,
k
(.) =
n
iD1
c
i
,
i
k
(.) . k = 1. . . . . n.
para cada una de las componentes de la solucin ,(.). A su vez, podemos escribir la igualdad (2.6) en
forma matricial como
,(.) = Y(.) c . (2.7)
siendo
Y(.) =
_
,
1
(.) ,
n
(.)
_
,
1
1
(.) . . . ,
n
1
(.)
.
.
.
.
.
.
.
.
.
,
1
n
(.) . . . ,
n
n
(.)
. c =
c
1
.
.
.
c
n
.
Denicin 2.5. Una matriz fundamental del sistema homogneo (2.4) es cualquier funcin matricial
Y : 1 M
n
(R) cuyas columnas forman un sistema fundamental de soluciones.
v Por lo que acabamos de ver, si Y(.) es una matriz fundamental del sistema homogneo (2.4), la
solucin general de dicho sistema est dada por la ecuacin (2.7).
26 SISTEMAS Y ECUACIONES LINEALES
v Una funcin matricial Y : 1 M
n
(R) es una matriz fundamental del sistema homogneo (2.4)
si y slo si sus columnas son linealmente independientes, y se cumple
Y
0
(.) = (.)Y(.) . V. 1 .
En efecto, la igualdad matricial anterior es equivalente a las n igualdades vectoriales
,
i 0
(.) = (.),
i
(.) . V. 1 . Vi = 1 . . . . . n.
donde ,
i
(.) es la i -sima columna de Y(.).
v Es obvio que un sistema homogneo posee innitas matrices fundamentales. Por otra parte, si
Y
1
(.) e Y
2
(.) son dos matrices fundamentales de (2.4) tales que Y
1
(.
0
) = Y
2
(.
0
) entonces
Y
1
= Y
2
en todo el intervalo 1. En efecto, cada columna de Y
1
y la correspondiente columna de
Y
2
son soluciones del sistema que toman el mismo valor en .
0
, por lo que deben coincidir en todo
1 en virtud del Teorema 2.2 de existencia y unicidad.
Dadas n soluciones
1
. . . . .
n
(no necesariamente independientes) del sistema homogneo (2.4), con-
sideramos la matriz de soluciones
(.) =
_
1
(.)
n
(.)
_
cuya i -sima columna viene dada por la solucin
i
. Ntese que, al ser por hiptesis
i 0
(.) = (.)
i
(.)
para i = 1. . . . . n, la matriz (.) verica la ecuacin matricial
0
(.) = (.)(.) . (2.8)
Denicin 2.6. Dadas n soluciones
1
. . . . .
n
del sistema homogneo (2.4), su wronskiano es el de-
terminante de la correspondiente matriz de soluciones (.), es decir,
W
1
. . . . .
n
|(.) det (.) =
1
1
(.) . . .
n
1
(.)
.
.
.
.
.
.
.
.
.
1
n
(.) . . .
n
n
(.)
. (2.9)
Notacin. Cuando est claro del contexto a qu soluciones
1
. . . . .
n
nos estamos reriendo denotare-
mos su wronskiano sencillamente como W(.).
La propiedad clave del wronskiano (2.9) es que su anulacin en cualquier punto del intervalo 1 im-
plica la dependencia lineal de las soluciones
1
. . . . .
n
en dicho intervalo, de acuerdo con la siguiente
Proposicin 2.7. Sean
1
. . . . .
n
soluciones del sistema homogneo (2.4) en el intervalo 1. Entonces
{
1
. . . . .
n
] son linealmente independientes == W
1
. . . . .
n
|(.) = 0, V. 1.
Demostracin. Veamos en primer lugar la implicacin (=). Si {
1
. . . . .
n
] fueran linealmente depen-
dientes, entonces los vectores {
1
(.). . . . .
n
(.)] seran linealmente dependientes para cada . 1. Pero
entonces W
1
. . . . .
n
|(.) = 0 para todo . 1.
En cuanto a la implicacin (=), si existiera .
0
1 tal que W
1
. . . . .
n
|(.
0
) = 0 entonces los
vectores {
1
(.
0
). . . . .
n
(.
0
)] seran linealmente dependientes, es decir, existiran n constantes reales
z
k
no todas nulas tales que
n
kD1
z
k
k
(.
0
) = 0 .
Pero entonces
,(.) =
n
kD1
z
k
k
(.)
sera solucin del sistema (2.4) con la condicin inicial ,(.
0
) = 0. Por el Teorema 2.2 de existencia y
unicidad , 0 en 1, y por tanto {
1
. . . . .
n
] seran linealmente dependientes.
Sistemas lineales de primer orden 27
v Si
1
. . . . .
n
son soluciones de ,
0
= (.), , de la ltima demostracin se sigue que o bien
W
1
. . . . .
n
|(.) = 0 para todo . 1, o bien W
1
. . . . .
n
|(.) = 0 para todo . 1.
v Ntese que una funcin matricial : 1 M
n
(R) es una matriz fundamental del sistema (2.4) si
y slo si
i)
0
(.) = (.)(.) . V. 1. (2.10a)
ii) det (.) = 0 . V. 1. (2.10b)
En efecto, la segunda condicin es equivalente a la independencia lineal de las columnas de (.)
en virtud de la proposicin anterior.
v Si (.) es una matriz fundamental y 1 M
n
(R) es cualquier matriz invertible, es inmediato
comprobar que v(.) = (.)1 cumple i) y ii), y por tanto es una matriz fundamental. Recproca-
mente, supongamos que (.) y v(.) son dos matrices fundamentales del sistema (2.4). Al ser las
matrices (.
0
) y v(.
0
) invertibles en virtud de la Proposicin 2.7, la matriz 1 = (.
0
)
1
v(.
0
)
existe y es invertible, siendo por construccin v(.
0
) = (.
0
)1. Entonces v(.) y (.)1 son
ambas matrices fundamentales de (2.4) y coinciden en .
0
, por lo que deben ser iguales en todo el
intervalo 1 en virtud del comentario de la pg. 26. En denitiva, cualquier matriz fundamental del
sistema homogneo (2.4) puede obtenerse a partir de una matriz fundamental ja multiplicndola
por la derecha por una matriz invertible apropriada.
Ejercicio. Si (.) es una matriz fundamental del sistema (2.4) y 1 es una matriz invertible qu puede
decirse de la matriz v(.) = 1(.)?
Denicin 2.8. Se denomina matriz fundamental cannica del sistema homogneo (2.4) (en el punto
.
0
) a la nica matriz fundamental Y(.) de dicho sistema que cumple Y(.
0
) = 1.
v Dada cualquier matriz fundamental Y(.) del sistema (2.4), entonces Y(.)Y(.
0
)
1
es su matriz
fundamental cannica en el punto .
0
.
v Si Y(.) es la matriz fundamental cannica del sistema (2.4) en .
0
, la solucin del problema de
valores iniciales
_
,
0
= (.),
,(.
0
) = ,
0
asociado a dicho sistema es simplemente
,(.) = Y(.),
0
.
Comentario. Dadas n funciones diferenciables
1
. . . . .
n
arbitrarias (no necesariamente solucin de
un sistema lineal homogneo (2.4) con continua en 1), la anulacin de su wronskiano (incluso idnti-
camente) no implica la dependencia lineal. Por ejemplo, las funciones
1
(.) =
_
sen .
.
_
.
2
(.) =
_
e
x
sen .
e
x
.
_
son linealmente independientes aunque su wronskiano se anula idnticamente en R.
28 SISTEMAS Y ECUACIONES LINEALES
2.1.3 Frmula de AbelLiouville
Sean
k
, k = 1. . . . . n, soluciones del sistema homogneo (2.4), y sea W(.) su wronskiano. Entonces
W
0
(.) =
n
iD1
1
1
(.) . . .
n
1
(.)
.
.
.
.
.
.
1
i
0
(.) . . .
n
i
0
(.)
.
.
.
.
.
.
1
n
(.) . . .
n
n
(.)
. (2.11)
Como
k
es solucin de (2.4) se verica
k
i
0
(.) =
n
}D1
a
i}
(.)
k
}
(.) . k = 1. . . . . n.
Luego
W
0
(.) =
n
iD1
1
1
(.) . . .
n
1
(.)
.
.
.
.
.
.
n
}D1
a
i}
(.)
1
}
(.) . . .
n
}D1
a
i}
(.)
n
}
(.)
.
.
.
.
.
.
1
n
(.) . . .
n
n
(.)
=
n
iD1
1
1
(.) . . .
n
1
(.)
.
.
.
.
.
.
a
i i
(.)
1
i
(.) . . . a
i i
(.)
n
i
(.)
.
.
.
.
.
.
1
n
(.) . . .
n
n
(.)
.
ya que un determinante no vara al sumar a una la una combinacin lineal de las restantes. Por tanto
W
0
(.) =
n
iD1
a
i i
W(.) = tr (.) W(.) .
Integrando esta ltima ecuacin lineal de primer orden a partir de un cierto .
0
1 se obtiene
W(.) = W(.
0
) e
_
x
x
0
tr (t ) dt
. V. 1 . (2.12)
expresin que se conoce como la frmula de AbelLiouville. Ntese que de esta frmula se deduce
tambin que o bien W(.) no se anula en 1, o bien W(.) se anula idnticamente en 1.
2.1.4 Mtodo de variacin de constantes
En general no resulta posible determinar de forma explcita una matriz fundamental del sistema homo-
gneo (2.4). Sin embargo, cuando se conoce una matriz fundamental Y(.) de dicho sistema se podr
determinar la solucin general del correspondiente sistema inhomogneo (2.1) utilizando el mtodo de
variacin de constantes. Anlogamente al caso escalar (ver pg. 12), el mtodo consiste en probar co-
mo solucin la funcin que se obtiene al sustituir el vector constante c de la solucin general (2.7) del
sistema homogneo por una funcin incgnita c(.), es decir,
,(.) = Y(.)c(.) . c(.) =
c
1
(.)
.
.
.
c
n
(.)
.
Sustituyendo en (2.1) obtenemos
,
0
(.) = Y
0
(.)c(.) Y(.)c
0
(.) = (.)Y(.)c(.) b(.) .
Sistemas con coecientes constantes 29
y teniendo en cuenta que al ser Y(.) una matriz fundamental verica las condiciones (2.10) queda
c
0
(.) = Y
1
(.)b(.) . V. 1 .
Luego
c(.) = c
_
x
Y
1
(s)b(s) ds . c R
n
.
Por tanto la solucin general del sistema inhomogneo (2.1) viene dada por
,(.) = Y(.) c Y(.)
_
x
Y
1
(s)b(s) ds . V. 1 . (2.13)
Ntese que (de acuerdo con la Proposicin 2.1.1) la solucin (2.13) es de la forma
,(.) = ,
h
(.) ,
p
(.) .
donde ,
h
(.) es la solucin general del sistema homogneo e ,
p
(.) es una solucin particular del siste-
ma inhomogneo. Por ltimo, se comprueba fcilmente que la solucin del problema de valores inicia-
les (2.3) es
,(.) = Y(.)Y
1
(.
0
) ,
0
_
x
x
0
Y(.)Y
1
(s)b(s) ds . V. 1 . (2.14)
2.2 Sistemas con coecientes constantes
Como hemos visto en la seccin anterior, la dicultad para resolver el sistema inhomogneo (2.1) estriba
en determinar una matriz fundamental del correspondiente sistema homogneo, ya que si se conoce
tal matriz la solucin general del sistema inhomogneo puede expresarse mediante cuadraturas (cf. la
ec. (2.13)). En esta seccin veremos que cuando la matriz (.) del sistema (2.1) es constante es posible
en principio construir una matriz fundamental del correspondiente sistema homogneo
,
0
= , . M
n
(R) . (2.15)
Ser de gran utilidad admitir soluciones complejas , : 1 R C
n
del sistema anterior. Al ser
por hiptesis los coecientes a
i}
de la matriz reales, es inmediato probar los siguientes resultados
elementales:
i) , : 1 R C
n
es solucin de (2.15) == , es solucin de dicho sistema.
ii) , : 1 R C
n
es solucin de (2.15) == Re ,. Im, son soluciones de dicho sistema.
Por analoga con las ecuaciones lineales escalares estudiadas en el captulo anterior, busquemos una
solucin del sistema (2.15) de la forma ,(.) = e
2x
, donde z C y C
n
son constantes, y = 0.
Al ser
,
0
(.) = ze
2x
. ,(.) = e
2x
.
se obtiene inmediatamente el siguiente resultado, que ser fundamental en lo que sigue:
Proposicin 2.9. ,(.) = e
2x
(con z C y C
n
constantes, y = 0) es solucin de (2.15) si y
slo si es autovector de con autovalor z.
30 SISTEMAS Y ECUACIONES LINEALES
2.2.1 diagonalizable
El resultado anterior permite construir fcilmente una matriz fundamental de (2.15) cuando su matriz
de coecientes es diagonalizable, es decir cuando existe una matriz invertible constante (en general
compleja) 1 tal que 1
1
1 es una matriz diagonal. Como es bien sabido, los elementos de la diagonal
principal de 1
1
1 son los autovalores (en general complejos) de la matriz , y las columnas de 1
forman una base de C
n
compuesta de autovectores de .
v Es bien sabido que los autovalores z
1
. . . . . z
n
de la matriz (donde estamos suponiendo que
z
i
= z
}
si i = ) son las races del polinomio caracterstico de , denido mediante
(t ) = det(t 1 ) . (2.16)
En otras palabras, el polinomio caracterstico se factoriza como
(t ) =
n
iD1
(t z
i
)
i
i
. (2.17)
El entero r
i
> 1 se denomina multiplicidad algebraica del autovalor z
i
. Ntese que, al ser
un
polinomio de grado n, de (2.17) se sigue que
n
iD1
r
i
= n. (2.18)
v Un resultado elemental de lgebra lineal arma que la matriz es diagonalizable si y slo si la
multiplicidad algebraica r
i
de cada autovalor z
i
coincide con su multiplicidad geomtrica s
i
,
denida por
1
s
i
= dimker( z
i
) . (2.19)
En otras palabras, s
i
es el nmero mximo de autovectores linealmente independientes correspon-
dientes al autovalor z
i
. Es bien sabido que la multiplicidad geomtrica es siempre menor o igual
que la algebraica, es decir, s
i
6 r
i
para todo i . Por tanto, si todos los autovalores son simples, es
decir, si r
i
= 1 para todo i , la matriz es diagonalizable.
v Otro criterio para determinar si una matriz es diagonalizable se basa en las nociones de polino-
mio mnimo e ndice de un autovalor. Recordemos que el polinomio mnimo
de una matriz
es el polinomio mnico
2
de menor grado que anula dicha matriz. La existencia del polinomio
mnimo es consecuencia del teorema de CayleyHamilton, segn el cual
() = 0. Puede pro-
barse que si el polinomio caracterstico est dado por (2.17), entonces el polinomio mnimo es de
la forma
(t ) =
n
iD1
(t z
i
)
d
i
. 1 6 J
i
6 r
i
. (2.20)
Ntese en particular que el polinomio mnimo divide exactamente al polinomio caracterstico. La
multiplicidad J
i
de z
i
como raz del polinomio mnimo se conoce como el ndice del autovalor z
i
.
Se demuestra (vase, por ejemplo, [EDI2009]) que
r
i
= s
i
== J
i
= 1 . (2.21)
Por tanto
diagonalizable == J
i
= 1 . Vi = 1. . . . . m. (2.22)
1
Si z C, a partir de ahora escribiremos por sencillez z en lugar de z1.
2
Un polinomio es mnico si el coeciente del trmino de mayor grado que aparece en dicho polinomio es igual a 1. Por
ejemplo, de (2.16) o (2.17) se sigue que el polinomio caracterstico de cualquier matriz es mnico.
Sistemas con coecientes constantes 31
En virtud de la discusin anterior, si es diagonalizable para cada autovalor z
i
de podemos en-
contrar r
i
autovectores linealmente independientes (en general complejos), que denotaremos por
i}
.
= 1. . . . . r
i
. Como los autovectores correspondientes a autovalores distintos son linealmente indepen-
dientes, es inmediato probar que el conjunto
_
i}
: = 1. . . . . r
i
. i = 1. . . . . m
_
(2.23)
es una base de C
n
. Por la Proposicin 2.9, las n funciones vectoriales (en general complejas)
,
i}
(.) = e
2
i
x
i}
. = 1. . . . . r
i
. i = 1. . . . . m. (2.24)
son soluciones del sistema (2.15). Para probar que las soluciones (2.24) forman un sistema fundamental
de soluciones de dicho sistema basta demostrar que son linealmente independientes. Pero esto es obvio,
ya que si
n
iD1
i
i
}D1
c
i}
,
i}
= 0 .
con c
i}
C, evaluando la identidad anterior en . = 0 se obtiene
i
i
}D1
c
i}
i}
= 0 == c
i}
= 0 . V = 1. . . . . r
i
. i = 1. . . . . m.
al ser (2.23) una base. Hemos probado por tanto el siguiente resultado:
Teorema 2.10. Supongamos que la matriz del sistema (2.15) es diagonalizable. Si los vectores (2.23)
forman una base de C
n
, siendo
i}
autovector de con autovalor z
i
, entonces las funciones (2.24)
son un sistema fundamental de soluciones de (2.15).
Como es una matriz real, en la prctica suele interesar construir a partir de (2.24) un sistema
fundamental de soluciones reales de (2.15). Para ello, ntese que al ser real podemos escoger los
autovectores
i}
de forma que se cumplan las dos condiciones siguientes:
i) Si z
i
R, entonces
i}
R
n
para todo = 1. . . . . r
i
.
ii) Si z
i
= z
k
C \ R, entonces
k}
=
i}
para todo = 1. . . . . r
i
r
k
.
En efecto, la demostracin de i) es inmediata, mientras que ii) es una sencilla consecuencia de la siguiente
propiedad: si z C es un autovalor de M
n
(R) y es un autovector de con autovalor z, entonces es
un autovector de con autovalor z. En particular, los autovalores complejos de aparecen en pares (z. z),
siendo la multiplicidad de un autovalor igual a la de su complejo conjugado.
Si se cumple la condicin i) anterior, las soluciones (2.24) correspondientes a autovalores reales z
i
son automticamente reales. Si, por el contrario, z
i
= a ib con b = 0 y
i}
= u in (siendo
u. n R
n
), podemos sustituir las dos soluciones complejas
e
(oib)x
(u in)
asociadas al autovalor z
i
y a su conjugado por las partes real e imaginaria de una cualquiera de ellas:
e
ox
_
ucos(b.) nsen(b.)
_
. e
ox
_
usen(b.) ncos(b.)
_
. (2.25)
(Ntese que las funciones (2.25) siguen siendo soluciones del sistema, en virtud de la propiedad ii) de la
pg. 29.) Procediendo de esta forma se obtienen n soluciones reales del sistema (2.15) de la forma (2.24)
(si el autovalor z
i
es real) o (2.25) (si a ib es un par de autovalores complejos conjugados de ), cuya
independencia lineal se comprueba fcilmente.
32 SISTEMAS Y ECUACIONES LINEALES
Ejemplo 2.11. Consideremos el sistema (2.15) con matriz de coecientes
=
0 0 1 0
0 0 0 1
1 0 0 0
0 1 0 0
. (2.26)
cuyo polinomio caracterstico est dado por
(t ) =
t 0 1 0
0 t 0 1
1 0 t 0
0 1 0 t
= t
2
(t
2
1) t
2
1 = (t
2
1)
2
.
Por tanto en este caso los autovalores de son z
1
= i y z
2
= i z
1
, con multiplicidades algebraicas
r
1
= r
2
= 2. El ncleo de i se calcula fcilmente teniendo en cuenta que
i =
i 0 1 0
0 i 0 1
1 0 i 0
0 1 0 i
-
_
1 0 i 0
0 1 0 i
_
.
ya que las dos primeras las son proporcionales a las dos ltimas. Una base de ker( i) est formada
(por ejemplo) por los vectores
11
= (1. 0. i. 0) .
12
= (0. i. 0. 1) .
siendo por tanto sus complejos conjugados
21
= (1. 0. i. 0) .
22
= (0. i. 0. 1)
base de ker(i). De lo anterior se deduce que s
1
= s
2
= 2, por lo que la matriz es diagonalizable. Un
sistema fundamental de soluciones (complejas) de (2.15)-(2.26) est dada por las funciones vectoriales
,
1
(.) = e
ix
1
0
i
0
. ,
2
(.) = e
ix
0
i
0
1
. ,
3
(.) = ,
1
(.) . ,
4
(.) = ,
2
(.) .
Para construir un sistema fundamental de soluciones reales del sistema dado, basta tomar las partes reales
e imaginarias de las soluciones complejas ,
1
e ,
2
. De esta forma se obtiene la matriz fundamental
Y(.) =
cos . sen . 0 0
0 0 sen . cos .
sen . cos . 0 0
0 0 cos . sen .
.
Esta matriz fundamental no es cannica (en .
0
= 0), ya que
Y(0) =
1 0 0 0
0 0 0 1
0 1 0 0
0 0 1 0
= 1 .
Sin embargo, es evidente que colocando la ltima columna de Y(0) en segundo lugar se obtiene la matriz
identidad. De esto se sigue que la matriz
(.) =
cos . 0 sen . 0
0 cos . 0 sen .
sen . 0 cos . 0
0 sen . 0 cos .
(2.27)
es la matriz fundamental cannica de (2.15)-(2.26) en el origen (por qu?).
Sistemas con coecientes constantes 33
2.2.2 no diagonalizable
El procedimiento descrito en la subseccin anterior para construir un sistema fundamental de soluciones
de (2.15) no es aplicable si la matriz no es diagonalizable, es decir si la multiplicidad geomtrica s
i
de algn autovalor z
i
de es estrictamente menor que su multiplicidad algebraica r
i
. En efecto, en este
caso slo podemos construir s
1
s
n
< r
1
r
n
= n soluciones linealmente independientes
de la forma (2.24).
Para construir un sistema fundamental de soluciones de (2.15) cuando la matriz de coecientes no
es diagonalizable, buscamos soluciones ligeramente ms generales que (2.24), de la forma
,(.) = e
2x
k
}D0
.
}
}
. (2.28)
con
}
C
n
para = 0. . . . . k. En este caso
,
0
(.) = ze
2x
k
}D0
.
}
}
e
2x
k
}D1
.
}1
( 1)
}
e
2x
k
}D0
.
}
(
}C1
z
}
) .
donde por denicin
kC1
= 0. Por tanto la funcin vectorial (2.28) es solucin del sistema (2.15) si y
slo si se cumplen las relaciones
}C1
= ( z)
}
. = 0. . . . . k .
es decir si
}
= ( z)
}
0
. = 0. . . . . k : ( z)
kC1
0
= 0 . (2.29)
donde hemos utilizado la condicin
kC1
= 0. Por tanto
0
ker( z)
kC1
. (2.30)
siendo adems
0
= 0, pues en caso contrario (2.28) se anulara idnticamente. De lo anterior se sigue
tambin que z es un autovalor de . En efecto, al ser
0
= 0 la ec. (2.30) implica que existe l N con
0 6 l 6 k tal que
I
= ( z)
I
0
= 0 y ( z)
IC1
0
= 0, y por tanto
( z)
I
( z)( z)
I
0
= ( z)
IC1
0
= 0 .
La discusin anterior demuestra el siguiente resultado, que generaliza la Proposicin 2.9:
Proposicin 2.12. Si z C es un autovalor de la matriz y C
n
es un elemento no nulo de
ker( z)
kC1
, entonces la funcin vectorial
,(.) = e
2x
k
}D0
.
}
( z)
}
es una solucin no trivial del sistema (2.15). Recprocamente, si (2.28) es solucin de (2.15) entonces
z es un autovalor de y los vectores
}
satisfacen (2.29).
Denicin 2.13. Si z es un autovalor de la matriz , diremos que un vector no nulo C
n
es un
autovector generalizado de autovalor z si ( z)
}
= 0 para algn > 1.
v Es inmediato probar que el conjunto de todos los autovectores propios generalizados de autova-
lor z, junto con el vector cero, forman un subespacio vectorial de C
n
. Esto motiva la siguiente
denicin:
34 SISTEMAS Y ECUACIONES LINEALES
Denicin 2.14. Llamaremos subespacio propio generalizado correspondiente a un autovalor z de
al subespacio vectorial 1
2
formado por sus autovectores propios generalizados junto con el vector 0.
v Ntese que cualquier autovector es por denicin un autovector generalizado, y por tanto
ker( z) 1
2
. (2.31)
Aceptaremos sin demostracin las siguientes propiedades fundamentales de los subespacios propios ge-
neralizados de la matriz , cuya justicacin puede verse, por ejemplo, en M. W. Hirsch y S. Smale,
Ecuaciones diferenciales, sistemas dinmicos y lgebra lineal (Alianza, Madrid, 1983):
Proposicin 2.15. Sean z
1
. . . . . z
n
(con z
i
= z
}
si i = ) los autovalores de , y sean r
i
y J
i
la
multiplicidad algebraica y el ndice del autovalor z
i
. Entonces se verica:
i) 1
2
i
= ker( z
i
)
d
i
.
ii) dim1
2
i
= r
i
.
iii) C
n
= 1
2
1
1
2
m
.
v La ltima igualdad es equivalente a la siguiente propiedad: si B
i
es una base de 1
2
i
(con i =
1. . . . . m), entonces B = B
1
L L B
n
es una base de C
n
.
v De (2.31) y del apartado ii) de la proposicin anterior se sigue inmediatamente que r
i
= s
i
si y
slo si 1
2
i
= ker( z
i
). Por tanto
diagonalizable == 1
2
i
= ker( z
i
) . Vi = 1. . . . . m.
Veamos a continuacin que el sistema (2.15) posee un sistema fundamental de soluciones de la
forma (2.28). En primer lugar, si z es un autovalor de de multiplicidad algebraica r e ndice J, por el
apartado ii) de la Proposicin 2.15 cualquier base de 1
2
estar formada por r vectores {
1
. . . . .
i
]. En
virtud de la Proposicin 2.12 (con k = J 1), las r funciones vectoriales
,
I
(.) = e
2x
d1
}D0
.
}
( z)
}
I
. l = 1. . . . . r . (2.32)
son soluciones de (2.15). Procediendo de esta forma con los m autovalores de obtenemos un conjunto
de r
1
r
n
soluciones de (2.15), cuya independencia lineal se demuestra, como en el caso de las
funciones (2.24), observando que ,
I
(0) =
I
y teniendo en cuenta el primer comentario tras la Proposi-
cin 2.15. Hemos probado por tanto la siguiente generalizacin del Teorema 2.10:
Teorema 2.16. Las funciones vectoriales de la forma (2.32), donde z es cualquier autovalor de y
{
1
. . . . .
i
] es una base del subespacio propio generalizado 1
2
, forman un sistema fundamental de
soluciones del sistema (2.15).
Al igual que en la subseccin anterior, si M
n
(R) se puede reemplazar el sistema fundamen-
tal (2.32) por otro real. Para ello basta observar que, al ser la matriz real, de nuevo es posible escoger
los vectores
I
de forma que cumplan el anlogo de las condiciones i)ii) de la pg. 31, es decir,
i) Si z R, entonces
I
R
n
para todo l = 1. . . . . r.
ii) Si z C \ R y {
1
. . . . .
i
] es una base de 1
2
entonces z tambin es autovalor, con las mismas
multiplicidades e ndice que z, y podemos tomar como base de 1
2
el conjunto
1
. . . . .
i
_
.
Sistemas con coecientes constantes 35
En tal caso, si el autovalor z es real las soluciones (2.32) son automticamente reales, al ser los corres-
pondientes vectores
I
(l = 1. . . . . r) reales. Por otra parte, si z = a ib es un autovalor complejo las
r soluciones asociadas al autovalor z son las complejas conjugadas de las soluciones asociadas a z. Por
tanto podemos reemplazar las 2r soluciones (2.32) asociadas a los autovalores z y z por las partes real e
imaginaria de (2.32). Ms concretamente, si llamamos
( z)
}
I
= u
I}
in
I}
. u
I}
. n
I}
R
n
. l = 1. . . . . r . = 1. . . . . J 1 .
entonces las 2r soluciones reales de (2.15) asociadas a los autovalores a ib estn dadas por
e
ox
d1
}D0
.
}
_
cos(b.)u
I}
sen(b.)n
I}
_
. e
ox
d1
}D0
.
}
_
sen(b.)u
I}
cos(b.)n
I}
_
.
donde l = 1. . . . . r. Es fcil comprobar que las n soluciones reales de (2.15) obtenidas de este modo
siguen siendo linealmente independientes, por lo que forman un sistema fundamental de soluciones de
dicho sistema.
A partir de las consideraciones anteriores se obtiene fcilmente el siguiente teorema:
Teorema 2.17. Las soluciones del sistema homogneo con coecientes constantes ,
0
= , , con
M
n
(R), son combinaciones lineales con coecientes en R
n
de funciones de la forma
.
}
e
ox
cos(b.) . .
k
e
ox
sen(b.) .
donde a ib (con b > 0) es un autovalor de , y los exponentes . k son estrictamente menores que
el ndice de dicho autovalor.
Demostracin. En primer lugar, es evidente que todas las soluciones del sistema fundamental real de (2.15)
que acabamos de construir son de esta forma. Basta entonces observar que una solucin arbitraria
de (2.15), al ser combinacin lineal (con coecientes en R) de soluciones de la forma anterior, es tambin
de dicha forma.
v Sea z un autovalor de la matriz M
n
(R), y sea 1
2
tal que
( z)
k
= 0 . ( z)
k1
= 0 .
Es fcil probar entonces que los k vectores
I
= ( z)
kI
. l = 1. . . . . k .
son linealmente independientes. En efecto, si
k
ID1
c
I
ID1
c
I
( z)
kI
= 0 . c
I
C.
aplicando sucesivamente a la identidad anterior los operadores (z)
k1
, (z)
k2
, . . . , (z)
se obtiene inmediatamente c
k
= c
k1
= = c
1
= 0.
v El resultado anterior es muy til a la hora de construir una base de 1
2
respecto de la cual las
soluciones (2.32) asociadas al autovalor z adopten la forma ms sencilla posible. Supongamos,
por ejemplo, que el autovalor z tiene multiplicidad algebraica r = 2 y geomtrica s = 1. En este
caso es fcil ver que el ndice J del autovalor z es igual a 2 (en virtud de (2.21) y de la desigualdad
J 6 r), y por tanto
1
2
= ker( z)
2
. dim1
2
= 2 .
36 SISTEMAS Y ECUACIONES LINEALES
Si ker( z)
2
\ ker( z), por lo que acabamos de ver los vectores
1
= ( z) .
2
= (2.33a)
son linealmente independientes, y por tanto forman una base de 1
2
. Teniendo en cuenta que
( z)
1
( z)
2
= 0 .
las dos soluciones linealmente independientes de la forma (2.32) asociadas al autovalor z son en
este caso
,
1
(.) = e
2x
1
. ,
2
(.) = e
2x
(
2
.
1
) . (2.33b)
Ejemplo 2.18. Hallemos una matriz fundamental del sistema
,
0
= , . =
1 1 1
2 1 1
0 1 1
. (2.34)
El polinomio caracterstico de la matriz es
(t ) =
t 1 1 1
2 t 1 1
0 1 t 1
= (t 1)(t
2
2t ) 2(2 t ) = (t 2)(t
2
t 2) = (t 1)(t 2)
2
.
Los autovalores de son por tanto z
1
= 1, z
2
= 2, con multiplicidades algebraicas r
1
= 1, r
2
= 2.
La solucin de (2.34) asociada al autovalor simple 1 es ,
1
(.) = e
x
n, siendo n un autovector de
de autovalor 1. Teniendo en cuenta que
1 =
2 1 1
2 2 1
0 1 2
-
_
2 1 1
0 1 2
_
-
_
2 0 3
0 1 2
_
.
podemos tomar n = (3. 4. 2), lo que proporciona la solucin
,
1
(.) = e
x
3
4
2
.
Construyamos a continuacin las dos soluciones linealmente independiente de (2.34) ligadas al segundo
autovalor z
2
= 2. En primer lugar, al ser
2 =
1 1 1
2 1 1
0 1 1
claramente de rango 2, se tiene
s
2
dimker( 2) = 3 rank( 2) = 1 .
Por el comentario anterior, las dos soluciones linealmente independientes asociadas al autovalor 2 son de
la forma (2.33), siendo un vector tal que ( 2)
2
= 0, ( 2) = 0. Como
( 2)
2
=
3 3 3
4 4 4
2 2 2
.
Sistemas con coecientes constantes 37
podemos tomar, por ejemplo, = (1. 1. 0), lo que conduce a las soluciones
,
2
(.) = e
2x
( 2) = e
2x
0
1
1
.
,
3
(.) = e
2x
_
.( 2)
_
= e
2x
1
1
0
.e
2x
0
1
1
= e
2x
1
. 1
.
.
En denitiva, una matriz fundamental del sistema (2.34) est dada por
Y(.) =
_
,
1
(.) ,
2
(.) ,
3
(.)
_
=
3e
x
0 e
2x
4e
x
e
2x
e
2x
(. 1)
2e
x
e
2x
.e
2x
. (2.35)
2.2.3 Exponencial de una matriz
Consideremos de nuevo el sistema homogneo con coecientes constantes (2.15), y denotemos por 1(.)
su matriz fundamental cannica en .
0
= 0, que satisface
1
0
(.) = 1(.) . 1(0) = 1 .
Derivando las igualdades anteriores se deduce que
1
(k)
(.) =
k
1(.) . k = 0. 1. . . . .
donde por denicin T
0
1 para cualquier matriz T, y por tanto
1
(k)
(0) =
k
. k = 0. 1. . . . .
Puede demostrarse (vase, por ejemplo, [EDI2009]) que la serie de Taylor de 1(.) centrada en el origen
converge a 1(.) para todo . R y para toda matriz , es decir
1(.) =
1
}D0
.
}
}
. V. R. (2.36)
Por analoga con el caso escalar, se dene la exponencial de una matriz T M
n
(C) mediante
e
B
=
1
}D0
T
}
. (2.37)
De nuevo, no es difcil demostrar (cf. [EDI2009]) que la serie anterior converge para toda matriz T.
De esta denicin y de (2.36) se sigue entonces que e
x
es la matriz fundamental cannica del sistema
homogneo con coecientes constantes (2.15). Por tanto, la solucin del problema de valores iniciales
_
,
0
(.) = ,(.)
,(0) = ,
0
est dada por
,(.) = e
x
,
0
.
Para todo t R jo, la matriz 1(. t ) (considerada como funcin de .) es una matriz fundamental
del sistema (2.15), dado que
d
d.
1(. t ) = 1
0
(. t ) = 1(. t ) . V. R.
38 SISTEMAS Y ECUACIONES LINEALES
Por otra parte, 1(.)1(t ) es otra matriz fundamental de (2.15), al ser 1(t ) una matriz constante invertible
(recurdese que 1(.) es invertible para todo . R, por ser una matriz fundamental). En . = 0, tanto
1(. t ) como 1(.)1(t ) toman el mismo valor 1(t ), por lo que 1(. t ) = 1(.)1(t ) para todo
.. t R. En otras palabras,
e
(xCt)
= e
x
e
t
( = e
t
e
x
) . V.. t R. (2.38)
Haciendo t = . se obtiene la identidad
_
e
x
_
1
= e
x
. V. R.
De las dos identidades anteriores se deduce que e
x
(e
x
0
)
1
= e
(xx
0
)
es la matriz fundamental
cannica de (2.15) en .
0
. Por tanto, la solucin del problema de valores iniciales
_
,
0
(.) = ,(.)
,(.
0
) = ,
0
est dada por
,(.) = e
(xx
0
)
,
0
.
De la identidad (2.38) y la expresin (2.13), obtenida al aplicar el mtodo de variacin de constantes, se
sigue que la solucin general del sistema inhomogneo asociado a (2.15)
,
0
= , b(.) . con b : 1 R
n
continua,
viene dada por
,(.) = e
x
c e
x
_
x
e
x
b(s) ds = e
x
c
_
x
e
(xx)
b(s) ds . c R
n
. (2.39)
Si imponemos adems la condicin inicial ,(.
0
) = ,
0
la solucin buscada es (cf. la ec. (2.14))
,(.) = e
(xx
0
)
,
0
_
x
x
0
e
(xx)
b(s) ds .
Ejemplo 2.19. Hallemos la matriz fundamental cannica e
x
del sistema (2.15) con matriz de coecien-
tes (2.26) utilizando la denicin (2.37). Para ello, basta tener en cuenta que
2
= 1, por lo que las
potencias de estn dadas por
2k
= (1)
k
1 .
2kC1
= (1)
k
. k = 0. 1. . . . .
Sustituyendo en la ec. (2.37) separando las potencias pares de de las impares se obtiene
e
x
=
1
kD0
.
2k
(2k)
(1)
k
1
1
kD0
.
2kC1
(2k 1)
(1)
k
= cos . 1 sen . .
que coincide con el resultado obtenido anteriormente (cf. la ec. (2.27)).
v La mayor parte de las veces, no es conveniente utilizar directamente la denicin (2.37) para
calcular la matriz fundamental cannica e
x
del sistema (2.15). Si se conoce cualquier matriz
fundamental Y(.) del sistema (2.15), siempre podemos calcular la matriz e
x
mediante la frmula
e
x
= Y(.)Y(0)
1
. (2.40)
Sistemas con coecientes constantes 39
Ejemplo 2.20. Calculemos la exponencial e
x
, siendo la matriz (2.34). Utilizando la ec. (2.35) se
obtiene
Y(0)
1
=
3 0 1
4 1 1
2 1 0
1
=
1
9
1 1 1
2 2 7
6 3 3
.
y por tanto
e
x
=
1
9
3e
x
0 e
2x
4e
x
e
2x
e
2x
(. 1)
2e
x
e
2x
.e
2x
1 1 1
2 2 7
6 3 3
=
1
9
6e
2x
3e
x
3e
2x
3e
x
3e
2x
3e
x
2e
2x
(3. 2) 4e
x
e
2x
(3. 5) 4e
x
e
2x
(3. 4) 4e
x
2e
2x
(1 3.) 2e
x
2e
x
e
2x
(3. 2) e
2x
(7 3.) 2e
x
. (2.41)
v Un caso particular importante en que es muy sencillo calcular la exponencial matricial e
x
es el
caso en que la matriz es diagonalizable. En efecto, si llamamos j
1
. . . . . j
n
a los autovalores
de (donde cada autovalor est repetido tantas veces cuanta sea su multiplicidad algebraica) y
{
1
. . . . .
n
] es una base de C
n
formada por autovectores de , de forma que
i
= j
i
i
para
i = 1. . . . . n, hemos visto en la Subseccin 2.2.1 que una matriz fundamental de (2.15) est dado
por
Y(.) =
_
e
1
x
1
e
n
x
n
_
= 1
1
x
.
.
.
e
n
x
.
siendo 1 = (
1
n
). De la denicin (2.37) se sigue inmediatamente que
1
x
.
.
.
e
n
x
= e
xJ
.
siendo J =
j
1
.
.
.
j
n
la forma cannica de la matriz . Teniendo en cuenta que Y(0) =
1, de (2.40) se deduce que
e
x
= 1 e
xJ
1
1
.
v En la siguiente subseccin veremos un mtodo muy eciente para calcular e
x
vlido tanto para
matrices diagonalizables como no diagonalizables, y que no requiere el conocimiento a priori de
una matriz fundamental del sistema (2.15).
2.2.4 Polinomio interpolador de Lagrange
Uno de los mtodos ms efectivos para el clculo de la exponencial de una matriz es el basado en el
polinomio interpolador de Lagrange, que describiremos a continuacin. (De hecho, como se muestra en
[EDI2009], se puede utilizar este mtodo para calcular cualquier funcin matricial () de una matriz
M
n
(R), donde : C C es una funcin analtica.) Para poder utilizar el mtodo del polinomio
interpolador de Lagrange recordemos que el polinomio mnimo (2.20) es el polinomio mnico de menor
grado que anula la matriz . Si denotamos por
J =
n
1D1
J
i
40 SISTEMAS Y ECUACIONES LINEALES
el grado del polinomio mnimo, al ser
() = 0, en la serie de la exponencial
e
x
=
1
kD0
.
k
k
k
podemos expresar cualquier potencia
k
con k > J en trminos de potencias
}
con < J. Por tanto,
para cada matriz existe un polinomio 1(z) (que depende de . y de ) tal que
e
x
= 1() . deg 1 6 J 1 . (2.42)
Dicho polinomio es nico, ya que si Q es otro polinomio de grado a lo sumo J 1 que cumple
e
x
= Q(), entonces 1 Q sera un polinomio de grado menor que
que anula a la matriz ,
y por tanto 1 Q = 0. El polinomio 1 denido por (2.42) se denomina polinomio interpolador de
Lagrange para la funcin e
x
. En la prctica, para el clculo de 1 se suele utilizar el siguiente resultado
[EDI2009]:
Proposicin 2.21. El polinomio
1(z) =
0
1
z
d1
z
d1
es el polinomio interpolador de Lagrange para la funcin e
x
si y slo si verica las ecuaciones
1
(})
(z
i
) = .
}
e
2
i
x
: i = 1. . . . . m. = 0. . . . . J
i
1 . (2.43)
siendo J
i
el ndice del autovalor z
i
.
v Las condiciones (2.43) son un sistema lineal de J
1
J
n
= J ecuaciones que determinan
los J coecientes del polinomio 1.
Ejemplo 2.22. Calculemos e
x
para la matriz (2.34) utilizando esta vez el mtodo del polinomio inter-
polador de Lagrange. En el Ejemplo 2.18 hemos visto que los autovalores de son z
1
= 1 y z
2
= 2
con multiplicidades algebraicas r
1
= 1, r
2
= 2 y geomtricas s
1
= s
2
= 1. Los ndices de los autova-
lores son por tanto J
1
= 1 y J
2
= 2 (al ser s
2
< r
2
, y por tanto no diagonalizable). Otra forma de
deducir que J
2
= 2 es comprobar que
( 1)( 2) =
2 1 1
2 2 1
0 1 2
1 1 1
2 1 1
0 1 1
. . .
2 . .
. . .
= 0 .
de modo que el polinomio mnimo coincide en este caso con el caracterstico. Como el polinomio mnimo
es de grado 3, el polinomio interpolador de Lagrange para la funcin e
x
debe ser de la forma
1(z) =
0
1
z
2
z
2
.
Los coecientes
0
.
1
.
2
se determinan mediante las ecuaciones (2.43), que en este caso son
1(1) =
0
1
2
= e
x
1(2) =
0
2
1
4
2
= e
2x
1
0
(2) =
1
4
2
= .e
2x
.
Resolviendo este sistema se obtiene
0
=
1
9
_
e
2x
(5 6.) 4e
x
_
.
1
=
1
9
_
e
2x
(4 3.) 4e
x
_
.
2
=
1
9
_
e
2x
(3. 1) e
x
_
.
Ecuaciones lineales 41
Sustituyendo en el miembro derecho de
e
x
= 1() =
0
1
2
2
=
0
1
1
1 1 1
2 1 1
0 1 1
3 1 1
4 4 0
2 2 2
se obtiene fcilmente la expresin nal de la ecuacin (2.41).
2.3 Ecuaciones lineales
2.3.1 Espacio de soluciones
Denicin 2.23. Una ecuacin lineal de orden n es una ecuacin diferencial de la forma
u
(n)
a
n1
(.) u
(n1)
a
1
(.) u
0
a
0
(.) u = b(.) . (2.44)
donde las funciones a
i
: R R (i = 0. . . . . n 1) y b : R R son continuas en un intervalo 1.
Diremos que la ecuacin (2.44) es homognea si b 0 en 1, e inhomognea o completa en caso
contrario.
Como se vio en el Captulo 1 (pgina 16), toda ecuacin diferencial de orden n puede escribirse
como un sistema de n ecuaciones de primer orden. El sistema de primer orden (1.65) asociado a la
ecuacin (2.44) es el sistema lineal
,
0
= (.) , b(.) e
n
. (2.45)
donde
(.) =
0 1 0 . . . 0
0 0 1 . . . 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 . . . 1
a
0
(.) a
1
(.) a
2
(.) . . . a
n1
(.)
(2.46)
se denomina matriz compaera de la ecuacin (2.44). Ntese, en particular, que
tr (.) = a
n1
(.) . (2.47)
expresin que utilizaremos ms adelante. Al ser las entradas de la matriz compaera (.) y la funcin
b(.) continuas en el intervalo 1, el Teorema 2.2 garantiza que el problema de valores iniciales dado por
la ecuacin (2.44) con las condiciones iniciales
u(.
0
) = u
0
. u
0
(.
0
) = u
1
. . . . . u
(n1)
(.
0
) = u
n1
(.
0
1) (2.48)
tiene solucin nica denida en todo 1:
Teorema 2.24. Si las funciones a
i
: 1 R (i = 0. . . . . n 1) y b : 1 R son continuas en
el intervalo 1, el problema de valores iniciales (2.44)-(2.48) posee solucin nica denida en todo 1
para cualquier dato inicial (.
0
. u
0
. . . . . u
n1
) 1 R
n
.
Utilizaremos una notacin anloga a la de los sistemas lineales de primer orden, denotando por S el
conjunto de soluciones de la ecuacin (2.44), y por S
0
el de la correspondiente ecuacin homognea
u
(n)
a
n1
(.) u
(n1)
a
1
(.) u
0
a
0
(.) u = 0 . (2.49)
Ntese que ambos conjuntos estn contenidos en C
n
(1). Razonando como en el caso de los sistemas de
primer orden se prueban inmediatamente las siguientes propiedades:
42 SISTEMAS Y ECUACIONES LINEALES
v Si
1
.
2
son dos soluciones de la ecuacin homognea (2.49), entonces cualquier combinacin
lineal z
1
j
2
con coecientes z. j R sigue siendo solucin. En otras palabras, el conjunto
S
0
de soluciones de la ecuacin homognea (2.49) es un espacio vectorial real (principio de
superposicin lineal).
v La solucin general de la ecuacin inhomognea (2.44) es de la forma u = u
p
u
h
, donde
u
p
es una solucin particular ja de dicha ecuacin y u
h
es la solucin general de la ecuacin
homognea correspondiente (2.49). Equivalentemente, el conjunto de soluciones de la ecuacin
inhomognea (2.44) es el espacio afn S = u
p
S
0
. donde u
p
es un elemento jo de S.
Para determinar la dimensin del espacio S
0
utilizaremos la siguiente propiedad:
v Si
1
. . . . .
k
son soluciones de la ecuacin lineal homognea (2.49), y denotamos por ,
i
=
(
i
.
0
i
. . . . .
(n1)
i
), i = 1. . . . . k, las correspondientes soluciones del sistema lineal de primer
orden asociado, entonces
{
1
. . . . .
k
] linealmente independientes == {,
1
. . . . . ,
k
] linealmente independientes .
La implicacin (=) es evidente. En cuanto al recproco, supongamos que
z
1
1
z
k
k
= 0 . z
i
R.
Derivando n 1 veces esta igualdad se sigue que
z
1
,
1
z
k
,
k
= 0 .
y por tanto z
1
= = z
k
= 0, al ser {,
1
. . . . . ,
k
] linealmente independientes por hiptesis.
De la propiedad anterior y el Teorema 2.3 se sigue inmediatamente el siguiente resultado:
Teorema 2.25. El espacio S
0
de soluciones de la ecuacin homognea (2.49) es de dimensin n.
Denicin 2.26. Un sistema fundamental de soluciones de la ecuacin homognea (2.49) es una base
{
1
. . . . .
n
] de su espacio de soluciones S
0
.
v Si {
1
. . . . .
n
] es un sistema fundamental de soluciones de (2.49), entonces cualquier solucin u
de dicha ecuacin puede expresarse como
u(.) =
n
iD1
c
i
i
(.) . c
i
R .
Denicin 2.27. Dadas n soluciones
1
. . . . .
n
de la ecuacin homognea (2.49), su wronskiano se
dene como el wronskiano de las correspondientes soluciones del sistema lineal asociado, es decir,
W
1
. . . . .
n
|(.) =
1
(.) . . .
n
(.)
0
1
(.) . . .
0
n
(.)
.
.
.
.
.
.
(n1)
1
(.) . . .
(n1)
n
(.)
. (2.50)
Utilizaremos frecuentemente la notacin abreviada W(.) en lugar de W
1
. . . . .
n
|(.) cuando que-
de claro por el contexto a qu soluciones
1
. . . . .
n
nos estamos reriendo. Al igual que en el caso de
los sistema lineales de primer orden, mediante el wronskiano es inmediato determinar la independencia
lineal de un conjunto de n soluciones de la ecuacin lineal homognea (2.49), de acuerdo con la siguiente
proposicin:
Ecuaciones lineales 43
Proposicin 2.28. Sean
1
. . . . .
n
soluciones de la ecuacin homognea (2.49) en el intervalo 1. En-
tonces {
1
. . . . .
n
] son linealmente independientes == W
1
. . . . .
n
|(.) = 0, V. 1.
Demostracin. Si ,
1
. . . . . ,
n
son las soluciones del sistema asociado de primer orden correspondientes
a
1
. . . . .
n
, del comentario previo al Teorema 2.25 y la Proposicin 2.7 se sigue que
{
1
. . . . .
n
] l.i. == {,
1
. . . . . ,
n
] l.i. == W,
1
. . . . . ,
n
|(.) = 0. V. 1 .
Pero, por denicin, W,
1
. . . . . ,
n
|(.) = W
1
. . . . .
n
|(.).
v Si
1
. . . . .
n
son soluciones de la ecuacin (2.49), por el comentario tras la Proposicin 2.7 o bien
W
1
. . . . .
n
|(.) = 0 para todo . 1, o bien W
1
. . . . .
n
|(.) = 0 para todo . 1. Luego
basta comprobar que W
1
. . . . .
n
|(.
0
) = 0 en un cierto .
0
1 para garantizar la independencia
lineal en 1 de dichas soluciones.
v Sean
1
. . . . .
n
soluciones de la ecuacin (2.49), y sea W(.) su wronskiano. Como la matriz
compaera (2.46) verica tr (.) = a
n1
(.), la frmula de AbelLiouville (2.12) se reduce a
W(.) = W(.
0
) e
_
x
x
0
a
n1
(t ) dt
. . 1 . (2.51)
Ntese que la armacin del comentario anterior se sigue directamente de esta frmula, y que el
wronskiano es constante si el coeciente a
n1
(.) se anula idnticamente en 1.
2.3.2 Reduccin del orden
En general, no es posible calcular un sistema fundamental de soluciones de la ecuacin homognea (2.49)
en forma explcita, es decir, en trminos de los coecientes a
i
(.) y sus primitivas. Sin embargo, en el
caso de una ecuacin de segundo orden
u
00
a
1
(.)u
0
a
0
(.)u = 0 . (2.52)
si se conoce una solucin no idnticamente nula se puede expresar la solucin general mediante cuadra-
turas. En efecto, si (.) es una solucin particular no trivial de la ecuacin (2.52), y denotamos por u(.)
una solucin cualquiera de dicha ecuacin, de la frmula de AbelLiouville (2.51) se sigue que
(.)u
0
0
(.) u = k e
_
x
x
0
a
1
(s) ds
.
siendo k = W. u|(.
0
). Integrando esta ecuacin lineal de primer orden para u obtenemos fcilmente
la siguiente expresin de la solucin general de (2.52):
u(.) = c(.) k(.)
_
x
x
0
e
_
t
x
0
a
1
(s) ds
2
(t )
dt .
Por tanto, (.) y la nueva solucin
[(.) = (.)
_
x
x
0
e
_
t
x
0
a
1
(s) ds
2
(t )
dt (2.53)
forman un sistema fundamental de soluciones de la ecuacin homognea (2.52), ya que (por construc-
cin) W. [|(.
0
) = 1 = 0.
44 SISTEMAS Y ECUACIONES LINEALES
Comentario. En el caso de la ecuacin homognea (2.49) de orden n > 2, el conocimiento de una
solucin particular no trivial (.) permite reducir dicha ecuacin a otra ecuacin lineal homognea de
orden n 1 mediante el cambio de variable
z =
_
u
(.)
_
0
. (2.54)
Por ejemplo, supongamos que (.) , 0 es una solucin particular de la ecuacin de tercer orden
u
000
a
2
(.)u
00
a
1
(.)u
0
a
0
(.)u = 0 . (2.55)
Escribiendo el cambio de variable (2.54) como u = (.)
_
x
z, obtenemos
u
0
=
0
(.)
_
x
z (.)z .
u
00
=
00
(.)
_
x
z 2
0
(.)z (.)z
0
.
u
000
=
000
(.)
_
x
z 3
00
(.)z 3
0
(.)z
0
(.)z
00
.
Sustituyendo estas expresiones en (2.52), y teniendo en cuenta que (.) es solucin de dicha ecuacin, se
obtiene la siguiente ecuacin de segundo orden para z:
(.)z
00
_
3
0
(.) a
2
(.)(.)
_
z
0
_
3
00
(.) 2a
2
(.)
0
(.) a
1
(.)(.)
_
z = 0 .
En general, se puede probar (ver L. Elsgoltz, Ecuaciones Diferenciales y Clculo Variacional, Ed. URSS,
Mosc, 1994) que si se conocen k soluciones linealmente independientes de una ecuacin lineal homo-
gnea de orden n, se puede transformar dicha ecuacin en una ecuacin lineal homognea de orden nk
aplicando sucesivamente cambios de variable de la forma (2.54). En particular, si se conocen n 1 so-
luciones de la ecuacin (2.49), es posible expresar su solucin general en trminos de cuadraturas tras
reducirla a una ecuacin lineal de primer orden mediante este procedimiento.
2.3.3 Mtodo de variacin de constantes
Al igual que para los sistemas lineales de primer orden, si se conoce un sistema fundamental de solu-
ciones de la ecuacin homognea (2.49) es posible expresar la solucin general de la ecuacin inhomo-
gnea (2.44) correspondiente mediante cuadraturas. En efecto, sea {
1
. . . . .
n
] un sistema fundamental
de soluciones de la ecuacin (2.49), y sea (.) la correspondiente matriz fundamental del sistema de
primer orden asociado, es decir,
(.) =
1
(.) . . .
n
(.)
0
1
(.) . . .
0
n
(.)
.
.
.
.
.
.
(n1)
1
(.) . . .
(n1)
n
(.)
.
La solucin general del sistema de primer orden (2.45) asociado a la ecuacin inhomognea (2.44) es
(ver Ec. (2.13))
,(.) = (.)c
_
x
b(t ) (.) (t )
1
e
n
dt . c =
c
1
.
.
.
c
n
R
n
. (2.56)
La solucin general de (2.44) es la primera componente del miembro derecho de la ltima ecuacin. Para
escribir esta solucin ms explcitamente, ntese que la primera componente de (.) (t )
1
e
n
es igual
a
n
iD1
1i
(.)
_
(t )
1
_
i n
=
n
iD1
i
(.)(1)
iCn
M
ni
(t )
W(t )
=
1
W(t )
1
(t ) . . .
n
(t )
0
1
(t ) . . .
0
n
(t )
.
.
.
.
.
.
(n2)
1
(t ) . . .
(n2)
n
(t )
1
(.) . . .
n
(.)
.
Ecuaciones lineales 45
donde M
ni
(t ) denota el menor asociado al elemento de matriz ni de la matriz (t ), y la ltima igualdad
se obtiene desarrollando el determinante por la ltima la. Sustituyendo la expresin anterior en (2.56)
obtenemos la siguiente expresin para la solucin general de la ecuacin (2.44):
u(.) =
n
iD1
c
i
i
(.)
_
x
1
(t) ...
n
(t)
0
1
(t) ...
0
n
(t)
.
.
.
.
.
.
.n2/
1
(t) ...
.n2/
n
(t)
1
(x) ...
n
(x)
b(t )
W(t )
dt . (2.57)
En particular, para la ecuacin lineal de segundo orden
u
00
a
1
(.) u
0
a
0
(.) u = b(.) (2.58)
se tiene
u(.) = c
1
1
(.) c
2
2
(.)
_
x
b(t )
W(t )
_
1
(t )
2
(.)
2
(t )
1
(.)
_
dt . (2.59)
Ntese que la funcin
u
p
(.) =
_
x
x
0
b(t )
W(t )
_
1
(t )
2
(.)
2
(t )
1
(.)
_
dt (2.60)
es una solucin particular de la ecuacin inhomognea (2.58) que verica las condiciones iniciales
u
p
(.
0
) = u
0
p
(.
0
) = 0 .
Ejemplo 2.29. Consideremos la ecuacin de segundo orden
u
00
u = tan . . (2.61)
Hallemos en primer lugar un sistema fundamental de soluciones de la ecuacin homognea
u
00
u = 0. (2.62)
El sistema de primer orden (2.45)-(2.46) asociado es
,
0
= ,
_
0 1
1 0
_
, . (2.63)
siendo , = (u. u
0
). Los autovalores de la matriz son las soluciones de la ecuacin
z 1
1 z
= z
2
1 = 0 == z = i .
Considerando el autovalor z = i, y tomando como autovector = (1. i), de las ecuaciones (2.25) se
sigue inmediatamente que un sistema fundamental de soluciones de (2.63) est dado por
,
1
(.) =
_
cos .. sen .
_
. ,
2
(.) =
_
sen .. cos .
_
.
Por tanto un sistema fundamental de soluciones de la ecuacin homognea (2.62) es
1
(.) = cos . .
2
(.) = sen . .
cuyo wronskiano es
W(.) =
cos . sen .
sen . cos .
= 1 .
46 SISTEMAS Y ECUACIONES LINEALES
(Ntese que W(.) es constante; esto es consecuencia de la frmula de AbelLiouville (2.51), ya que
en este caso a
n1
a
1
= 0.) De la ecuacin (2.59) se sigue que una solucin particular de de la
ecuacin (2.61) es
u
p
=
_
x
tan t cos t sen . sen t cos .| dt
= sen .
_
x
sen t dt cos .
_
x
1 cos
2
t
cos t
dt = cos .
_
x
sec t dt . (2.64)
Para evaluar la ltima integral efectuamos el cambio de variable s = tan
t
2
, de modo que
ds =
1
2
(1 tan
2 t
2
) dt =
1
2
(1 s
2
) dt == dt =
2
1 s
2
ds .
Por otro lado,
cos t = 2 cos
2 t
2
1 =
2
sec
2
t
2
1 =
2
1 tan
2
t
2
1 =
2
1 s
2
1 =
1 s
2
1 s
2
.
sen t = 2 sen
t
2
cos
t
2
=
2 tan
t
2
sec
2
t
2
=
2s
1 s
2
.
Luego
_
sec t dt =
_
1 s
2
1 s
2
2
1 s
2
ds =
_
2
1 s
2
ds =
_
ds
1 s
_
ds
1 s
= log
1 s
1 s
= log
1 s
2
1 s
2
2s
1 s
2
= log [ sec t tan t [ .
Sustituyendo esta expresin en (2.64) y aadiendo la solucin general de la ecuacin homognea (2.62)
concluimos que
u = c
1
cos . c
2
sen . cos . log [ sec . tan .[
es la solucin general de la ecuacin (2.61).
2.4 Ecuaciones con coecientes constantes.
Un caso particular de gran inters prctico en el que es posible encontrar la solucin general de la
ecuacin lineal (2.44) es aqul en que los coecientes a
i
(.) son constantes, es decir,
u
(n)
a
n1
u
(n1)
a
1
u
0
a
0
u = b(.) . a
0
. . . . . a
n1
R. (2.65)
Consideremos en primer lugar la correspondiente ecuacin homognea
u
(n)
a
n1
u
(n1)
a
1
u
0
a
0
u = 0 . (2.66)
cuya matriz compaera es la matriz constante
=
0 1 0 . . . 0
0 0 1 . . . 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 . . . 1
a
0
a
1
a
2
. . . a
n1
. (2.67)
Ecuaciones con coecientes constantes. 47
El polinomio caracterstico de se calcula fcilmente desarrollando det(z ) por la ltima la, obte-
nindose
(z) = z
n
a
n1
z
n1
a
1
z a
0
(z) . (2.68)
El polinomio (z) se denomina polinomio caracterstico de la ecuacin (2.66). Las races del polino-
mio caracterstico (z) son por tanto los autovalores de la matriz compaera . Se puede determinar
la forma de la solucin general de la ecuacin (2.66) aplicando los mtodos de la Seccin 2.2 al siste-
ma lineal asociado (2.15)-(2.67). Sin embargo, en la prctica resulta ms fcil estudiar directamente la
ecuacin (2.66), como haremos a continuacin.
Comencemos escribiendo la ecuacin (2.66) en la forma
_
D
n
a
n1
D
n1
a
1
D a
0
_
u (D)u = 0 . D
d
d.
.
De la igualdad
(D z)
_
(.)e
2x
_
=
0
(.)e
2x
.
se sigue inmediatamente que
(D z)
k
_
(.)e
2x
_
=
(k)
(.)e
2x
. (2.69)
Supongamos que el polinomio caracterstico (z) se factoriza como
(z) = (z z
1
)
i
1
(z z
n
)
i
m
. r
1
r
n
= n.
donde las races z
1
. . . . . z
n
, en general complejas, son distintas entre s. Si z
i
es una de estas races
podemos por tanto escribir
(z) = q(z)(z z
i
)
i
i
.
siendo q(z) un polinomio de grado n r
i
con q(z
i
) = 0. Luego (D) = q(D)(D z
i
)
i
i
, y de la
Ec. (2.69) se sigue entonces que
(D)
_
.
k
e
2
i
x
_
= q(D)
_
e
2
i
x
d
i
i
d.
i
i
.
k
_
= 0 . k = 0. 1. . . . . r
i
1 .
Esto demuestra que las funciones
.
k
e
2
i
x
. i = 1. . . . . m. k = 0. 1. . . . . r
i
1 . (2.70)
son solucin de la ecuacin (2.66). Como hay precisamente r
1
r
n
= n soluciones de este tipo,
para probar que forman un sistema fundamental de soluciones de dicha ecuacin basta comprobar su
independencia lineal.
Lema 2.30. Las funciones (2.70) son linealmente independientes.
Demostracin. Supongamos que
n
iD1
i
i
1
kD0
c
ik
.
k
e
2
i
x
= 0 . V. R. (2.71)
donde los coecientes c
ik
son constantes complejas. Podemos reescribir esta igualdad como
1
1
(.)e
2
1
x
1
n
(.)e
2
m
x
= 0 . V. R. (2.72)
siendo 1
i
(.) =
i
i
1
kD0
c
ik
.
k
un polinomio de grado menor o igual que r
i
1. Para demostrar que to-
dos los coecientes c
ik
de la ecuacin (2.71) son nulos, basta probar que los polinomios 1
i
se anulan
48 SISTEMAS Y ECUACIONES LINEALES
idnticamente. Para establecer este resultado, comencemos multiplicando la ecuacin (2.72) por e
2
1
x
,
obteniendo
1
1
(.) 1
2
e
2
x
1
n
(.)e
m
x
= 0 . V. R. (2.73)
donde los exponentes j
i
z
i
z
1
= 0 son todos distintos entre s. Derivando esta ecuacin r
1
veces
se obtiene
Q
2
(.)e
2
x
Q
n
(.)e
m
x
= 0 . V. R. (2.74)
donde Q
i
es un polinomio del mismo grado que 1
i
. Repitiendo este procedimiento sucesivas veces se
llega nalmente a una ecuacin del tipo
1
n
(.)e
m
x
= 0 . V. R. (2.75)
donde 1
n
es un polinomio del mismo grado que 1
n
. De esta condicin se sigue inmediatamente que
1
n
0, lo cual implica (al ser deg 1
n
= deg 1
n
) que 1
n
0. Como el orden de las races z
i
es
irrelevante para el argumento anterior, concluimos que todos los polinomios 1
i
se anulan idnticamente.
La discusin anterior y el Lema 2.30 prueban por tanto el siguiente teorema:
Teorema 2.31. Las funciones (2.70), donde r
i
es la multiplicidad de la raz z
i
del polinomio caracte-
rstico (2.68), constituyen un sistema fundamental de soluciones de la ecuacin lineal homognea con
coecientes constantes (2.66).
v Si la raz z
}
= a
}
ib
}
es compleja, podemos sustituir las 2r
}
soluciones complejas
.
k
e
o
j
x
e
ib
j
x
. k = 0. 1. . . . . r
}
1 .
asociadas a las races z
}
y z
}
del polinomio caracterstico por las 2r
}
soluciones reales
.
k
e
o
j
x
cos(b
}
.) . .
k
e
o
j
x
sen(b
}
.) k = 0. 1. . . . . r
}
1 .
que se obtienen al tomar la parte real y la parte imaginaria de las soluciones correspondientes a la
raz z
}
(o z
}
).
Ejemplo 2.32. Hallemos la solucin general de la ecuacin de cuarto orden con coecientes constantes
u
(4)
u
000
u
0
u = 0 . (2.76)
El polinomio caracterstico asociado a esta ecuacin es
(z) = z
4
z
3
z 1 = (z 1)
2
(z
2
z 1) . (2.77)
Las races son por tanto z
1
= 1 (de multiplicidad r
1
= 2) y las dos races de la ecuacin
z
2
z 1 = 0 .
es decir
z
2,3
=
1
2
_
1 i
_
3
_
.
de multiplicidad r
2
= r
3
= 1. La solucin general de la ecuacin (2.76) es por tanto
u(.) = e
x
(c
1
c
2
.) e
x
2
_
c
3
cos
_
p
3
2
.
_
c
4
sen
_
p
3
2
.
_
_
. (2.78)
con c
1
. . . . . c
4
constantes arbitrarias.
Ecuaciones con coecientes constantes. 49
2.4.1 Mtodo de los coecientes indeterminados
Una vez hallado un sistema fundamental de soluciones de la ecuacin homognea (2.66), se puede cal-
cular la solucin general de la ecuacin inhomognea (2.65) para cualquier funcin b(.) utilizando el
mtodo de variacin de constantes (ver la Ec. (2.57)). Sin embargo, para ciertas formas sencillas de la
funcin b(.) que se presentan frecuentemente en la prctica, el mtodo de los coecientes indetermina-
dos que describiremos a continuacin permite calcular una solucin particular de (2.65) de manera ms
rpida. La solucin general de (2.65) se halla entonces sumando a esta solucin particular la solucin
general de la correspondiente ecuacin homognea.
Supongamos, en primer lugar, que
b(.) = q(.)e
x
. (2.79)
donde q(.) es un polinomio. Si r es la multiplicidad de j como raz del polinomio caracterstico (2.68)
de la ecuacin homognea (2.66), entonces
(z) =
1
(z j)
i
2
(z j)
iC1
ni
(z j)
n1
(z j)
n
.
con
1
. . . . .
ni
R ( C, si j es complejo) y
1
= 0. Ntese que esta expresin es vlida tambin
si j no es raz del polinomio caracterstico, siendo en este caso r = 0. De la expresin anterior y la
Ec. (2.69) se sigue que
(D)
_
(.)e
x
_
=
_
(i)
(.)
2
(iC1)
(.)
ni
(n1)
(.)
(n)
(.)
_
e
x
.
Esto sugiere probar una solucin particular de la forma
u
p
(.) = .
i
Q(.)e
x
. (2.80)
donde
Q(.) = Q
0
Q
1
. Q
d
.
d
. J deg q (2.81)
es un polinomio que se determina mediante la condicin
1
(.
i
Q)
(i)
2
(.
i
Q)
(iC1)
ni
(.
i
Q)
(n1)
(.
i
Q)
(n)
= q . (2.82)
Puede probarse que la ltima ecuacin proporciona un sistema lineal de J 1 ecuaciones en los J 1
coecientes de Q que siempre es compatible. Por tanto, la ecuacin (2.65) con el trmino inhomog-
neo (2.79) siempre tiene una solucin particular de la forma (2.80)-(2.81), donde r es la multiplicidad de
j como raz del polinomio caracterstico y el polinomio Q se determina mediante la ecuacin (2.82) (o
bien directamente, sustituyendo (2.80)-(2.81) en (2.65)).
Ejemplo 2.33. Hallemos una solucin particular de la ecuacin
u
(4)
u
000
u
0
u = .e
x
. (2.83)
Aqu j = 1 es una raz del polinomio caracterstico de la ecuacin homognea de multiplicidad 2 (ver
la Ec. (2.77) en el Ejemplo 2.32), y q(.) = . es un polinomio de grado 1. Buscamos por tanto una
solucin particular de la forma
u
p
(.) = .
2
(a b.)e
x
.
Para calcular (D) u
p
es conveniente en este caso desarrollar (D) en potencias de D 1, ya que en
virtud de la Ec. (2.69) se tiene (D1)
k
_
(.)e
x
_
=
(k)
(.)e
x
. Utilizando la frmula de Taylor para
desarrollar el factor z
2
z 1 en potencias de z 1 obtenemos
(z) = (z 1)
2
_
3 3(z 1) (z 1)
2
_
.
50 SISTEMAS Y ECUACIONES LINEALES
Por tanto
(D)u
p
=
_
3(2a 6b.) 3 6b
_
e
x
= .e
x
== 3(2a 6b.) 18b = . .
lo que conduce a las ecuaciones
6a 18b = 0 . 18b = 1 .
La solucin particular buscada es por tanto
u
p
(.) =
1
18
(.
3
3.
2
)e
x
. (2.84)
La solucin general de la ecuacin (2.83) es la suma de esta solucin particular y la solucin gene-
ral (2.78) de la ecuacin homognea.
Ejemplo 2.34. Consideremos ahora la ecuacin
u
(4)
4u = .
_
1 e
x
cos .
_
. (2.85)
El polinomio caracterstico de la ecuacin homognea es
(z) = z
4
4 .
cuyas races z
k
son las races cuartas de 4:
z
k
=
_
2 e
i(
4
Ck
2
)
. k = 0. 1. 2. 3 .
es decir,
z
0
= 1 i . z
1
= 1 i . z
2
= 1 i . z
3
= 1 i .
Por tanto la solucin general de la ecuacin homognea est dada por
u
h
(.) = e
x
(c
1
cos . c
2
sen .) e
x
(c
3
cos . c
4
sen .) . c
i
R. (2.86)
Aparentemente no se puede aplicar el mtodo de los coecientes indeterminados a la Ec. (2.85), al no
ser el trmino inhomogneo de la forma (2.79). Sin embargo, como el miembro derecho de (2.85) es la
suma de los trminos
b
1
(.) = . . b
2
(.) = .e
x
cos . .
la suma de sendas soluciones particulares u
i
(.) de las ecuaciones
u
(4)
4u = b
i
(.) . i = 1. 2 . (2.87)
es (por linealidad) una solucin particular de (2.85). El trmino inhomogneo de la primera de estas
ecuaciones es directamente de la forma (2.79), con q(.) = . y j = 0. Como 0 no es una raz del
polinomio caracterstico, buscamos una solucin particular de la forma u
1
(.) = a b.. Sustituyendo
en la correspondiente ecuacin completa (2.87) obtenemos inmediatamente
u
1
(.) =
.
4
.
Por otro lado, al ser b
2
(.) = Re
_
.e
(1Ci)x
_
, podemos buscar una solucin particular de la segunda
ecuacin (2.87) de la forma u
2
(.) = Re u(.), donde u(.) es cualquier solucin de la ecuacin
u
(4)
4u = .e
(1Ci)x
. (2.88)
El miembro derecho de esta ecuacin es de nuevo de la forma (2.79), con q(.) = . y j = 1 i raz
simple del polinomio caracterstico, por lo que ensayamos una solucin particular de la forma
u(.) = .(a b.)e
(1Ci)x
(.)e
x
.
Ecuaciones con coecientes constantes. 51
Sustituyendo en (2.88) y utilizando la regla de Leibniz generalizada
(g)
(n)
=
n
kD0
_
n
k
_
(k)
g
(nk)
se obtiene
j
4
e
x
4j
3
e
x
0
6j
2
e
x
00
4e
x
= .e
x
== 4j
3
(a 2b.) 6j
2
2b = . .
donde hemos tenido en cuenta que j
4
= 4. Por tanto
8j
3
b = 1
ja 3b = 0
==
b =
1
8j
3
=
j
32
=
1
32
(1 i)
a =
3b
j
=
3
32
.
y entonces
u(.) =
.
32
_
3 (1 i).
_
e
(1Ci)x
.
Tomando la parte real de esta funcin se obtiene
u
2
(.) =
.
32
e
x
_
(3 .) cos . . sen .
_
.
Por tanto la ecuacin inhomognea (2.85) admite la solucin particular
u
p
(.) = u
1
(.) u
2
(.) =
.
4
.
32
e
x
_
(3 .) cos . . sen .
_
.
La solucin general de la ecuacin (2.85) es la suma de esta solucin particular y la solucin gene-
ral (2.86) de la ecuacin homognea.
v En general, el mtodo de los coecientes indeterminados se puede aplicar a la ecuacin (2.65) si
el trmino inhomogneo es de la forma
b(.) =
I
iD1
b
i
(.) . (2.89)
donde
b
i
(.) = e
i
x
_
q
i
(.) cos(
i
.) q
i
(.) sen(
i
.)
_
. (2.90)
siendo
i
.
i
R (
i
> 0), y q
i
. q
i
polinomios. Ntese que si
i
= 0 la funcin b
i
(.) es de la
forma (2.79) con j =
i
. Se puede comprobar que la ecuacin (2.65) con el trmino inhomog-
neo (2.89)-(2.90) posee una solucin particular del tipo
u
p
(.) =
I
iD1
u
i
(.) . (2.91)
donde
u
i
(.) = .
i
i
e
i
x
_
Q
i
(.) cos(
i
.)
Q
i
(.) sen(
i
.)
_
. (2.92)
siendo r
i
la multiplicidad de j
i
=
i
i
i
como raz del polinomio caracterstico de la ecuacin
homognea, y Q
i
.
Q
i
polinomios tales que deg Q
i
. deg
Q
i
6 max(deg q
i
. deg q
i
).
52 SISTEMAS Y ECUACIONES LINEALES
2.5 Estabilidad
Consideremos el problema de valores iniciales para un sistema (no necesariamente lineal) de ecuaciones
diferenciales de primer orden
_
,
0
= (.. ,)
,(.
0
) = j .
(2.93)
Supongamos que para j = ,
0
el problema (2.93) tiene una solucin nica en la semirrecta .
0
. o), que
denotaremos por ,(.: ,
0
).
Denicin 2.35. Diremos que la solucin ,(.: ,
0
) es estable si
i) Existe 1 > 0 tal que si [j ,
0
[ < 1 el problema (2.93) tiene una solucin nica ,(.: j) en el
intervalo .
0
. o).
ii) Para todo c > 0, existe 0 < < 1 tal que
[j ,
0
[ < == [,(.: j) ,(.: ,
0
)[ < c . V. > .
0
. (2.94)
Se dice que la solucin ,(.: ,
0
) es inestable si no es estable. Por ltimo, diremos que la solucin
,(.: ,
0
) es asintticamente estable si es estable, y adems cumple
iii) Existe 0 < r < 1 tal que
[j ,
0
[ < r == lim
x!1
[,(.: j) ,(.: ,
0
)[ = 0 . (2.95)
Nota. En general, la condicin iii) no basta por si sla para garantizar la estabilidad asinttica de la
solucin ,(.: ,
0
), ya que dicha condicin en general no implica ii). Sin embargo, si el sistema (2.93) es
lineal, veremos que cualquier solucin ,(.: ,
0
) que cumpla iii) es asintticamente estable.
v Grcamente, la estabilidad de la solucin ,(.: ,
0
) signica que para cualquier c > 0, podemos
encontrar un > 0 sucientemente pequeo tal que las soluciones que parten de la bola T
(,
0
)
en el instante .
0
permanecen en cada instante posterior . dentro de la bola de radio c centrada en
,(.: ,
0
) (ver Figura 2.1). Si adems existe r > 0 tal que todas las soluciones que parten de T
i
(,
0
)
para . = .
0
tienden a la solucin ,(.: ,
0
) cuando . oentonces ,(.: ,
0
) es asintticamente
estable (cf. Fig. 2.1).
x x
Figura 2.1: Izquierda: solucin ,(.: ,
0
) estable. Derecha: solucin ,(.: ,
0
) asintticamente estable.
En general, la estabilidad es una propiedad de cada solucin ,(.: ,
0
) del sistema (2.93), es decir, un
mismo sistema puede tener a la vez soluciones estables e inestables. As, en el Ejemplo 1.17 del captulo
anterior (pg. 20), la solucin constante , = 0 es asintticamente estable, mientras que la otra solucin
constante , = 1 es inestable. A continuacin veremos que los sistemas lineales son de nuevo especiales
a este respecto, ya que para ellos todas las soluciones tienen el mismo tipo de estabilidad.
Estabilidad 53
Proposicin 2.36. Si : R M
n
(R) y b : R R
n
son continuas en el intervalo .
0
. o), una
solucin cualquiera del sistema lineal
,
0
= (.), b(.) (2.96)
es estable o asintticamente estable si y slo si lo es la solucin trivial , 0 del sistema homogneo
asociado.
Demostracin. Al ser y b continuas en .
0
. o), el Teorema 2.2 garantiza que el sistema (2.96) tiene
una nica solucin ,(.: j) denida en .
0
. o) que verica la condicin inicial ,(.
0
: j) = j, cualquiera
que sea j R
n
. Anlogamente, el sistema homogneo ,
0
= (.), tiene una nica solucin ,
h
(.: j)
en .
0
. o) que cumple ,
h
(.
0
: j) = j. Entonces, la funcin ,(.: j) ,(.: ,
0
) es solucin del sistema
homogneo con dato inicial
,(.
0
: j) ,(.
0
: ,
0
) = j ,
0
.
De la unicidad de las soluciones de dicho sistema en el intervalo .
0
. o) se sigue que
,(.: j) ,(.: ,
0
) = ,
h
(.: j ,
0
) .
De esta igualdad se obtiene fcilmente el enunciado.
Este resultado justica la siguiente denicin:
Denicin 2.37. Se dice que el sistema lineal (2.96) es estable (resp. asintticamente estable) si todas
sus soluciones son estables (resp. asintticamente estables), o equivalentemente, si la solucin trivial del
sistema homogneo asociado es estable (resp. asintticamente estable). El sistema (2.96) es inestable si
no es estable.
v Ntese que el sistema (2.96) tiene el mismo tipo de estabilidad que el sistema homogneo asociado.
El siguiente resultado relaciona la estabilidad de un sistema homogneo con la acotacin de sus
soluciones en el intervalo .
0
. o).
Proposicin 2.38. El sistema lineal homogneo
,
0
= (.), . (2.97)
con continua en .
0
. o), es estable si y slo si todas sus soluciones estn acotadas en dicho intervalo.
Demostracin.
=) Si el sistema es estable tambin lo es la solucin trivial, y por tanto existe > 0 tal que (por ejemplo)
[j[ < ==
_
_
,(.: j)
_
_
< 1 . V. > .
0
.
Entonces para todo . > .
0
se tiene
_
_
,(.: ,
0
)
_
_
=
_
_
_
_
,
_
.:
,
0
1 [,
0
[
1 [,
0
[
__
_
_
_
=
1 [,
0
[
_
_
_
_
,
_
.:
,
0
1 [,
0
[
__
_
_
_
<
1 [,
0
[
.
=) Si todas las soluciones estn acotadas para . > .
0
se tiene
_
_
,(.: e
i
)
_
_
< M
i
. i = 1. . . . . n.
Luego
_
_
,(.: j)
_
_
=
_
_
_
_
n
iD1
j
i
,(.: e
i
)
_
_
_
_
6
n
iD1
[j
i
[ M
i
6
_
n
iD1
M
i
_
[j[ M[j[ . V. > .
0
.
Dado c > 0 basta tomar < c,M en la denicin de estabilidad para comprobar que la solucin trivial
del sistema, y por tanto el propio sistema, es estable.
54 SISTEMAS Y ECUACIONES LINEALES
v Si el sistema homogneo (2.97) es estable y la funcin matricial es continua en R, de modo que
las soluciones estn denidas en todo R, dichas soluciones no tienen por qu estar acotadas en el
intervalo (o. .
0
|.
El siguiente resultado caracteriza la estabilidad asinttica de un sistema homogneo en trminos del
comportamiento de sus soluciones cuando . o.
Proposicin 2.39. El sistema lineal homogneo (2.97) es asintticamente estable si y slo si todas sus
soluciones tienden a cero cuando . o.
Demostracin.
=) Si el sistema es asintticamente estable tambin lo es la solucin trivial, y por tanto existe r > 0 tal
que
[j[ < r == lim
x!1
,(.: j) = 0 . (2.98)
Dado ,
0
R
n
, procediendo como en la proposicin anterior se demuestra que
,(.: ,
0
) =
1 [,
0
[
r
,(.: j) . j =
r,
0
1 [,
0
[
.
Al ser [j[ < r, de (2.98) se sigue inmediatamente que ,(.: ,
0
) 0 cuando . o.
=) En primer lugar, si todas las soluciones de (2.97) tienden a cero cuando . o, entonces estn
acotadas en el intervalo .
0
. o), y por tanto el sistema es estable en virtud de la proposicin anterior.
Adems, la condicin lim
x!1
,(.: ,
0
) = 0 implica que la solucin trivial es asintticamente estable.
Por la Proposicin 2.36, el sistema es asintticamente estable.
La Proposicin 2.38 no es cierta para sistemas ms generales, ni siquiera para sistemas lineales
inhomogneos. La siguiente proposicin resume la relacin entre la acotacin de las soluciones y la
estabilidad de un sistema lineal inhomogneo.
Proposicin 2.40. Sea el sistema
,
0
= (.), b(.) . (2.99)
con : R M
n
(R) y b : R R
n
continuas en .
0
. o). Entonces:
i) Si el sistema (2.99) es estable, entonces o bien todas las soluciones estn acotadas en .
0
. o), o
bien ninguna lo est.
ii) Si todas las soluciones de (2.99) estn acotadas en .
0
. o), entonces el sistema es estable.
Demostracin.
i) Basta tener en cuenta que ,(.: ,
0
) = ,
h
(.: ,
0
) ,(.: 0) y que ,
h
(.: ,
0
) est acotada en .
0
. o)
al ser estable el sistema homogneo asociado.
ii) Si todas las soluciones del sistema (2.99) estn acotadas en .
0
. o), entonces tambin lo estn las
del sistema homogneo asociado, ya que cualquier solucin de este sistema es la diferencia de dos
soluciones del sistema (2.99). Por la proposicin anterior el sistema homogneo es estable, y por
tanto tambin lo es el sistema inhomogneo.
Estabilidad 55
2.5.1 Sistemas con coecientes constantes
Consideremos a continuacin el sistema lineal
,
0
= , b(.) . M
n
(R) . (2.100)
con b : R R
n
continua en .
0
. o), cuya estabilidad es la misma que la del sistema homogneo
asociado
,
0
= , . (2.101)
En el siguiente teorema, cuya demostracin aparece en [EDI2009], caracterizaremos la estabilidad de
cualquiera de estos dos sistemas en trminos de los autovalores de la matriz .
Teorema 2.41.
i) Si todos los autovalores de tienen parte real negativa, el sistema (2.100) es asintticamente
estable.
ii) Si algn autovalor de tiene parte real positiva, el sistema (2.100) es inestable.
iii) Si todos los autovalores de tienen parte real no positiva, el sistema (2.100) es estable (pero no
asintticamente estable) si los ndices de todos los autovalores con parte real nula son iguales a
uno, e inestable en caso contrario.
Ejemplo 2.42. Estudiemos la estabilidad del sistema
,
0
1
= ,
2
,
0
2
= ,
1
,
0
3
= ,
4
,
0
4
= 2,
1
,
3
.
(2.102)
La matriz de coecientes es en este caso
=
0 1 0 0
1 0 0 0
0 0 0 1
2 0 1 0
.
El polinomio caracterstico es
(z) =
z 1 0 0
1 z 0 0
0 0 z 1
2 0 1 z
z 1
1 z
z 1
1 z
= (z
2
1)
2
.
y por tanto los autovalores son
z
1
= i . z
2
= i .
ambos de multiplicidad algebraica 2. Por el Teorema 2.41 el sistema (2.102) no puede ser asintticamente
estable, y ser estable slo si el ndice de cada uno de los autovalores es 1, es decir, si el polinomio
mnimo de es
(t ) = (t i)(t i) = t
2
1 . (2.103)
Como
2
=
0 1 0 0
1 0 0 0
0 0 0 1
2 0 1 0
0 1 0 0
1 0 0 0
0 0 0 1
2 0 1 0
= 1 .
56 SISTEMAS Y ECUACIONES LINEALES
el polinomio mnimo de no est dado por (2.103), y por tanto el sistema es inestable.
Otra forma de llegar a este resultado es recordar que el ndice de un autovalor es 1 si y slo la
multiplicidad algebraica de dicho autovalor coincide con la geomtrica. Comprobemos (por ejemplo) que
la multiplicidad geomtrica s
1
del autovalor z
1
= i es menor que su multiplicidad algebraica r
1
= 2. En
efecto, la matriz
i =
i 1 0 0
1 i 0 0
0 0 i 1
2 0 1 i
tiene rango 3, ya que (por ejemplo) el menor
1 i 0
0 0 i
2 0 1
= 2
es no nulo. Por tanto
s
1
= dimker( i) = 4 rank( i) = 1 < 2.
como habamos armado.
2.5.2 Ecuaciones de orden n
La estabilidad de las soluciones de una ecuacin diferencial ordinaria de orden n
u
(n)
= J(.. u. u
0
. . . . . u
(n1)
) (2.104)
se dene en trminos de la estabilidad de las soluciones del sistema de primer orden asociado
,
0
= (.. ,) . (2.105)
donde
, (,
1
. ,
2
. . . . . ,
n
) =
_
u. u
0
. . . . . u
(n1)
_
. (.. ,) =
_
,
2
. . . . . ,
n
. J(.. ,)
_
.
Ms concretamente:
Denicin 2.43. Se dice que una solucin u(.) de la ecuacin diferencial de orden n (2.104) es estable
(respectivamente asintticamente estable) si lo es la correspondiente solucin ,(.) =
_
u(.). u
0
(.). . . . .
u
(n1)
(.)) del sistema de primer orden asociado (2.105).
En particular, para una ecuacin lineal
u
(n)
a
n1
(.) u
(n1)
a
1
(.) u
0
a
0
(.) u = b(.) . (2.106)
donde las funciones a
i
: R R (i = 0. . . . . n 1) y b : R R son continuas en el intervalo .
0
. o),
utilizando la Proposicin 2.36 se obtiene el siguiente resultado:
Proposicin 2.44. Una solucin cualquiera de la ecuacin lineal de orden n (2.106) es estable o asin-
tticamente estable si y slo si lo es la solucin trivial u 0 de la ecuacin homognea asociada.
v Por la proposicin anterior, todas las soluciones de la ecuacin lineal (2.106) tienen el mismo tipo
de estabilidad, y por tanto tiene sentido decir que dicha ecuacin es estable, asintticamente estable
o inestable. Adems, al igual que para los sistemas lineales de primer orden, la ecuacin (2.106)
tiene el mismo tipo de estabilidad que la ecuacin homognea asociada.
Estabilidad 57
A continuacin discutiremos la estabilidad de las ecuaciones lineales con coecientes constantes, de
la forma
u
(n)
a
n1
u
(n1)
a
1
u
0
a
0
u = b(.) . a
0
. . . . . a
n1
R. (2.107)
Para ello utilizaremos el siguiente lema, para cuya demostracin nos remitimos a [EDI2009]:
Lema 2.45. El ndice de cualquier autovalor de la matriz compaera (2.67) de la ecuacin homog-
nea (2.66) coincide con la multiplicidad algebraica de dicho autovalor.
Utilizando el Teorema 2.41 y el lema anterior, se obtiene inmediatamente el siguiente resultado:
Teorema 2.46. Sea (z) el polinomio caracterstico de la ecuacin lineal con coecientes
constantes (2.107). Entonces:
i) Si todas las races de tienen parte real negativa, la ecuacin es asintticamente estable.
ii) Si alguna raz de tiene parte real positiva, la ecuacin es inestable.
iii) Si todas las races de tienen parte real no positiva, la ecuacin es estable (pero no asinttica-
mente estable) si todas las races con parte real nula son simples, e inestable en caso contrario.
2.5.3 Criterio de RouthHurwitz
El criterio de estabilidad de un sistema o ecuacin lineal con coecientes constantes que acabamos de
deducir requiere conocer las races del polinomio caracterstico del sistema o ecuacin considerado.
Aunque el clculo aproximado de estas races no presenta ningn problema, el clculo exacto es difcil
para polinomios de grado 3 y 4, y en general imposible para polinomios de grado superior. Sera por
tanto deseable disponer de algn criterio de estabilidad formulado exclusivamente en trminos de los
coecientes del sistema o ecuacin, particularmente cuando dichos coecientes dependen de parmetros.
El caso ms interesante en la prctica, y por tanto el ms estudiado, es el de estabilidad asinttica. Esto
motiva la siguiente denicin:
Denicin 2.47. Se dice que un polinomio es estable si todas sus races tienen parte real negativa.
v Ntese, por tanto, que si el polinomio caracterstico de una ecuacin o sistema con coecientes
constantes es estable, dicha ecuacin o sistema es asintticamente estable.
En lo que sigue slo consideraremos polinomios mnicos con coecientes reales
(t ) = t
n
a
n1
t
n1
a
1
t a
0
. a
i
R. (2.108)
de la misma forma que el polinomio caracterstico de un sistema o ecuacin real con coecientes cons-
tantes. Una condicin necesaria para que un polinomio sea estable es que todos sus coecientes sean
positivos:
Proposicin 2.48. Si el polinomio (2.108) es estable, entonces a
i
> 0 para i = 0. . . . . n 1.
Demostracin. En efecto, si las races (no necesariamente distintas) de son j
1
. . . . . j
i
y
1
i
1
. . . . .
x
i
x
con j
i
.
i
.
i
> 0 y r 2s = n, entonces dicho polinomio se puede escribir como
(t ) = (t j
1
) (t j
i
)
_
(t
1
)
2
2
1
_
_
(t
x
)
2
2
x
_
= (t j
1
) (t j
i
)(t
2
2
1
t
2
1
2
1
) (t
2
2
x
t
2
x
2
x
) . (2.109)
Es evidente de esta frmula que todos los coecientes de son estrictamente positivos.
58 SISTEMAS Y ECUACIONES LINEALES
La condicin anterior, aunque muy sencilla, no es general suciente a menos que el polinomio sea
de segundo grado. El siguiente criterio, que no demostraremos, proporciona una condicin necesaria y
suciente para la estabilidad del polinomio (2.108):
Criterio de RouthHurwitz. Una condicin necesaria y suciente para que el polinomio (2.108) sea
estable es que todos los menores principales del determinante
a
n1
1 0 0 . . . 0 0 0
a
n3
a
n2
a
n1
1 . . . 0 0 0
a
n5
a
n4
a
n3
a
n2
. . . 0 0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 0 . . . a
0
a
1
a
2
0 0 0 0 . . . 0 0 a
0
(2.110)
sean positivos. Adems, si alguno de dichos menores es negativo el polinomio (2.108) tiene alguna raz
con parte real positiva.
v Ntese que el criterio de RouthHurwitz proporciona tambin una condicin suciente de inesta-
bilidad de un sistema o ecuacin con coecientes constantes, cuando alguno de los menores del
determinante (2.110) correspondiente a su polinomio caracterstico es negativo.
Utilizando el criterio de RouthHurwitz se obtienen condiciones necesarias y sucientes de estabili-
dad asinttica muy sencillas para valores pequeos de n, que discutiremos a continuacin.
v n = 2. En este caso las condiciones de RouthHurwitz son:
a
1
> 0 .
a
1
1
0 a
0
= a
0
a
1
> 0 .
es decir
a
0
> 0 . a
1
> 0 .
v n = 3. El determinante (2.110) es en este caso
a
2
1 0
a
0
a
1
a
2
0 0 a
0
.
y por tanto el criterio de RouthHurwitz proporciona las condiciones
a
2
> 0 . a
1
a
2
a
0
> 0 . a
0
(a
1
a
2
a
0
) > 0 .
o bien
a
0
> 0 . a
2
> 0 . a
1
a
2
a
0
> 0 . (2.111)
Ntese que estas condiciones implican que a
1
> 0.
v n = 4. El determinante de RouthHurwitz es en este caso
a
3
1 0 0
a
1
a
2
a
3
1
0 a
0
a
1
a
2
0 0 0 a
0
.
y por tanto las condiciones del criterio son:
a
3
> 0 . a
2
a
3
a
1
> 0 . H a
1
(a
2
a
3
a
1
) a
0
a
2
3
> 0 . a
0
H > 0 .
Estabilidad 59
es decir,
a
0
> 0 . a
3
> 0 . a
2
a
3
a
1
> 0 . a
1
a
2
a
3
a
2
1
a
0
a
2
3
> 0 .
De nuevo, es fcil ver que estas condiciones implican que a
1
. a
2
> 0. Tambin es inmediato
comprobar que dichas condiciones son equivalentes a
a
0
> 0 . a
1
> 0 . a
3
> 0 . a
1
a
2
a
3
a
2
1
a
0
a
2
3
> 0 .
Ejemplo 2.49. Discutamos la estabilidad del sistema lineal inhomogneo
,
0
= , b . =
0 4 1
0 0 1
2 0 a
. b =
0
4
0
. (2.112)
en funcin de los valores del parmetro a R. En primer lugar, recordemos que la estabilidad de (2.112)
es la misma que la del sistema homogneo asociado ,
0
= ,. El polinomio caracterstico de la matriz
es
(z) =
z 4 1
0 z 1
2 0 z a
= z
3
az
2
2z 8 .
Las condiciones (2.111) se reducen en este caso a
a > 0 . 2a 8 > 0 .
y por tanto el sistema (2.112) es asintticamente estable si y slo si a < 4. Adems, si a > 4 el
sistema es inestable, ya que entonces el determinante de la matriz de RouthHurwitz es negativo. Slo
queda por determinar la estabilidad del sistema en el caso a = 4, en que el polinomio caracterstico
est dado por
(z) = z
3
4z
2
2z 8 . (2.113)
En este caso es posible encontrar una raz entera (divisor de 8), concretamente z
1
= 4, y determinar
as las dos races restantes z
2,3
=
_
2i. Como todas las races del polinomio caracterstico tienen parte
real negativa o nula, y las que tienen parte real nula tienen ndice uno (al ser simples), el sistema es
estable pero no asintticamente estable cuando a = 4.
Veamos a continuacin cmo podramos razonar que el polinomio (2.113) tiene una raz real negativa
y dos races complejas conjugadas con parte real nula, sin necesidad de determinar explcitamente dichas
races. En primer lugar, si a = 4 todas las races del polinomio
son simples, ya que las races de
(z) = 3z
2
8z 2
son
z
=
1
3
_
4
_
10
_
.
mientras que
(z
) =
4
27
_
68 5
_
10
_
= 0 .
Cuando una raz de un polinomio es simple, puede probarse que dicha raz es funcin continua de los
coecientes del polinomio. De este hecho se sigue que
debe tener al menos una raz con parte real
nula. En efecto, ninguna raz puede tener parte real positiva, pues todas ellas tienen parte real negativa
para a < 4 y son funciones continuas de a por el comentario anterior. Tampoco es posible que todas
las races tengan parte real negativa, ya que en ese caso se violara el criterio de RouthHurwitz. Como
evidentemente z = 0 no es raz de
y dicho polinomio es de grado 3, de lo anterior se deduce que
tiene dos races complejas conjugadas con parte real 0 y una raz real negativa, como ya sabamos.
60 SISTEMAS Y ECUACIONES LINEALES
Captulo 3
Soluciones en forma de serie
3.1 Puntos regulares. Ecuaciones de Hermite y Legendre
Nos dedicaremos en este captulo al estudio de la ecuacin lineal homognea de segundo orden
u
00
a
1
(.) u
0
a
0
(.) u = 0 . (3.1)
aunque los mtodos que vamos a introducir a continuacin se generalizan sin dicultad a ecuaciones
lineales homogneas de orden n > 2. En general, salvo en casos muy particulares (por ejemplo, si los
coecientes a
i
son constantes), es imposible resolver exactamente la ecuacin (3.1), es decir expresar su
solucin general en trminos de sus coecientes y las primitivas de dichos coecientes. El inters de las
ecuaciones de la forma (3.1) se debe a su aparicin en numerosos problemas de gran inters en Fsica.
Ejemplo 3.1. La ecuacin de Schrdinger independiente del tiempo para una partcula cuntica unidi-
mensional de masa m sometida a un potencial V(s) en un estado estacionario de energa 1 es
2
2m
[
00
(s)
_
V(s) 1
_
[(s) = 0 . (3.2)
siendo ~ 1.055 10
34
J s la constante de Planck reducida y [(s) la amplitud de la densidad de
probabilidad (en general compleja) de la partcula. En otras palabras, la probabilidad de encontrar la
partcula en el intervalo a. b| es
_
b
o
[[(s)[
2
ds. La ecuacin anterior es una ecuacin lineal homognea
de segundo orden, que se puede escribir en la forma reducida
[
00
(s)
_
c U(s)
_
[(s) = 0 . (3.3)
siendo
c =
2m1
2
. U(s) =
2m
2
V(s) . (3.4)
Supongamos, en primer lugar, que la partcula se mueve en un campo de fuerzas constante J > 0.
Entonces V(s) = Js, y por tanto
U(s) = U
0
s . U
0
=
2mJ
2
> 0 .
Efectuando el cambio de variable
. = U
2{3
0
(c U
0
s) . u(.) = [(s)
(el signo menos se debe a razones histricas) se obtiene la ecuacin de Airy
u
00
. u = 0 . (3.5)
61
62 SOLUCIONES EN FORMA DE SERIE
Esta ecuacin no se puede resolver en trminos de funciones elementales. De hecho, su solucin general
se expresa en trminos de funciones de Airy (que a su vez se pueden escribir en trminos de funciones
de Bessel).
Consideremos ahora el oscilador armnico cuntico, para el cual el potencial es
V(s) =
1
2
mo
2
s
2
. (3.6)
La ecuacin de Schrdinger reducida es por tanto
[
00
_
c
_
mo
_
2
s
2
_
[ = 0 .
Efectuando el cambio
. =
_
mo
s . u(.) = [(s)
se obtiene la ecuacin de Weber
u
00
(z .
2
)u = 0 . (3.7)
siendo
z =
c
mo
=
21
o
una constante adimensional. De nuevo, para valores arbitrarios de z la solucin general de la ecuacin
anterior no es expresable en trminos de funciones elementales, sino a travs de funciones parablicas
cilndricas. Sin embargo, si z = 2n1 con n = 0. 1. 2. . . . entonces la ecuacin (3.7) tiene una solucin
particular de la forma
u(.) = e
x
2
2
H
n
(.) .
siendo H
n
el polinomio de Hermite de grado n. Para estos valores de z, la energa correspondiente es
1 =
_
n
1
2
_
o . (3.8)
Se puede probar que stos son los nicos valores de 1 para los cuales la ecuacin de Schrdinger (3.2)
con el potencial armnico (3.6) admite alguna solucin normalizable, es decir tal que
_
1
1
[[(s)[
2
ds < o.
Por tanto, las energas de los estados ligados (con energa bien denida) del oscilador armnico cuntico
estn dadas por la expresin (3.8). En particular, a diferencia de lo que ocurre en mecnica clsica, las
energas de un oscilador cuntico estn cuantizadas.
3.1.1 Puntos regulares
En esta seccin veremos que cuando los coecientes de la ecuacin (3.1) son sucientemente regulares,
la solucin general de dicha ecuacin se puede expresar mediante desarrollos en series de potencias.
Antes de abordar este problema, repasaremos brevemente algunos conceptos sobre funciones analticas
de variable real que sern de utilidad en lo que sigue.
Denicin 3.2. Una funcin : R R es analtica en el punto .
0
R si existe r > 0 tal que
(.) =
1
kD0
c
k
(. .
0
)
k
. [. .
0
[ < r . (3.9)
En lo que sigue utilizaremos las siguientes propiedades bien conocidas de las series de potencias:
Puntos regulares. Ecuaciones de Hermite y Legendre 63
v Existe 1 (0. o| tal que la serie (3.9) converge si [. .
0
[ < 1 y diverge si [. .
0
[ > 1 (en
particular, 1 = osi (3.9) converge en todo R). Dicho 1 se denomina radio de convergencia de
la serie (3.9). La serie converge absolutamente en el intervalo de convergencia (.
0
1. .
0
1),
siendo adems uniformemente convergente en cualquier subintervalo compacto del intervalo de
convergencia.
v La funcin analtica (3.9) es innitas veces derivable en su intervalo de convergencia, y sus deri-
vadas se pueden calcular derivando trmino a trmino la serie que la dene, es decir,
(})
(.) =
1
kD}
c
k
k(k 1) (k 1)(. .
0
)
k}
.
Luego
c
}
=
(})
(.
0
)
. = 0. 1. . . . . (3.10)
y por tanto en el intervalo de convergencia se puede representar mediante su serie de Taylor
centrada en .
0
(.) =
1
kD0
(k)
(.
0
)
k
(. .
0
)
k
. [. .
0
[ < 1. (3.11)
v De la propiedad anterior se sigue inmediatamente que una funcin : R R es analtica en .
0
si es C
1
en .
0
, y la serie de Taylor de centrada en .
0
converge a en un entorno de dicho
punto.
v Si es analtica en .
0
, entonces es analtica en todo punto del intervalo de convergencia (.
0
1. .
0
1).
v Si . g : R R son analticas en .
0
, las funciones z jg (con z. j R) y g son analticas
en .
0
. Si, adems, g(.
0
) = 0, el cociente ,g es analtico en .
0
.
Ejemplo 3.3. La funcin (.) = .
(con R) slo es analtica en . = 0 si N L{0]. En efecto,
para cualquier otro valor de las derivadas de la funcin de orden mayor que son singulares en el
origen. De hecho ni siquiera est bien denida para . < 0, salvo si es un racional ,q con . q Z
primos entre s y q impar. La funcin g(.) = [.[
est denida en toda la recta real para > 0, pero no
es C
1
(y por tanto tampoco analtica) en . = 0 a menos que sea un entero no negativo par.
Ejemplo 3.4. Existen funciones C
1
que no son analticas. Por ejemplo, la funcin : R R dada
por
(.) =
_
e
1{x
2
. . = 0
0 . . = 0
es C
1
en R, pero no es analtica en el origen ya que todas sus derivadas se anulan en dicho punto.
Denicin 3.5. Se dice que .
0
R es un punto regular (u ordinario) de la ecuacin (3.1) si los
coecientes a
0
(.) y a
1
(.) son funciones analticas en .
0
. El punto .
0
se dice singular si no es regular,
es decir, si a
0
(.) a
1
(.) no son analticas en dicho punto.
En otras palabras, si .
0
es un punto regular de la ecuacin (3.1) entonces tanto a
0
como a
1
admiten
sendos desarrollos en serie de potencias de . .
0
a
i
(.) =
1
kD0
a
i,k
(. .
0
)
k
. i = 0. 1 .
con radios de convergencia positivos 1
0
y 1
1
, respectivamente. Por tanto ambas series convergen simul-
tneamente si [. .
0
[ < 1 min(1
0
. 1
1
) > 0.
64 SOLUCIONES EN FORMA DE SERIE
Ejemplo 3.6. Si los coecientes de la ecuacin (3.1) son polinomios en la variable independiente todo
punto es regular para dicha ecuacin. Esto es lo que ocurre, por ejemplo, para las ecuaciones de Airy y
de Weber.
Ejemplo 3.7. Estudiemos cules son los puntos regulares de la ecuacin lineal homognea de segundo
orden
(e
x
1)u
00
.
2
u
0
sen . u = 0 . (3.12)
Para ello, debemos primero escribir la ecuacin en la forma (3.1), es decir
u
00
.
2
e
x
1
u
0
sen .
e
x
1
u = 0 . . = 0 .
Los coecientes de la ecuacin son por tanto
a
0
(.) =
sen .
e
x
1
. a
1
(.) =
.
2
e
x
1
(. = 0) .
El numerador y el denominador de las fracciones que denen a a
0
y a
1
son funciones analticas en todo
punto. Adems, el denominador e
x
1 slo se anula en . = 0. Como el cociente de funciones analticas
es una funcin analtica en los puntos donde no se anula el denominador, concluimos que a
0
y a
1
son
analticas en cualquier punto .
0
= 0. Por tanto todo punto .
0
= 0 es un punto regular de la ecuacin
(3.12).
En cuanto al punto .
0
= 0, aunque el denominador e
x
1 se anula en este punto, ocurre lo mismo
con los numeradores sen . y .
2
. De hecho, deniendo
a
0
(0) = lim
x!0
a
0
(.) = lim
x!0
cos .
e
x
= 1 . a
1
(0) = lim
x!0
a
1
(.) = lim
x!0
2.
e
x
= 0 .
los coecientes a
k
son funciones analticas en . = 0. En efecto,
a
0
(.) =
1
kD0
(1)
k
.
2kC1
(2k 1)
1
kD1
.
k
k
=
1
kD0
(1)
k
.
2k
(2k 1)
1
kD1
.
k1
k
=
1
kD0
(1)
k
.
2k
(2k 1)
1
ID0
.
I
(l 1)
.
siendo tanto el numerador como el denominador funciones analticas en R (series convergentes de po-
tencias de . con radio de convergencia innito; aplquese, por ejemplo, el criterio del cociente). Como
la serie en el denominador no se anula (vale 1) para . = 0, el cociente a
0
(.) es analtico en . = 0.
Anlogamente,
a
1
(.) =
.
2
1
kD1
.
k
k
=
.
1
ID0
.
I
(l 1)
es de nuevo el cociente de dos series de potencias de . convergentes en toda la recta real, con denomi-
nador distinto de cero en el origen. Luego tambin el origen es un punto regular de la ecuacin (3.12), y
por tanto todos los puntos son regulares para esta ecuacin.
Cul es el radio de convergencia de las series de Taylor de a
0
y a
1
centradas en el punto .
0
? En
principio parece difcil responder a esta pregunta, ya que no es fcil obtener la expresin general de
los coecientes en estos desarrollos. Sin embargo, para calcular el radio de convergencia lo mejor es
extender las funciones a
0
y a
1
al plano complejo, es decir considerar
a
0
(z) =
sen z
e
;
1
. a
1
(z) =
z
2
e
;
1
. z C.
Puntos regulares. Ecuaciones de Hermite y Legendre 65
donde (al igual que antes) se dene a
0
(0) = 1 y a
1
(0) = 0. En efecto, puede probarse que el radio de
convergencia de una serie de potencias en la variable . R no vara cuando se extiende dicha serie al
plano complejo. Las funciones a
0
y a
1
(con a
0
(0) y a
1
(0) denidos como antes) son analticas en todo
el plano complejo excepto en los puntos
z
k
= 2ki . k Z {0] .
pues en estos puntos se anula el denominador en las expresiones que denen a
0
y a
1
, mientras que el
numerador es distinto de cero (recurdese que sen(2ki) = i senh(2k) = 0 si k = 0). El radio de
convergencia de las series de Taylor complejas
a
i
(z) =
1
kD0
a
i,k
(z z
0
)
k
. i = 0. 1 . z
0
C.
es igual a la distancia de z
0
a la singularidad ms prxima de la funcin a
i
(ya que dicha funcin no est
acotada en un entorno de la singularidad). En particular, si z
0
= .
0
R obtenemos las frmulas
1
0
= 1
1
=
_
4
2
.
2
0
.
ya que las singularidades de las funciones a
0
a
1
ms prximas a un punto del eje real estn en 2i.
En particular, si .
0
= 0 entonces 1
0
= 1
1
= 2.
Teorema 3.8. Sea .
0
un punto regular de la ecuacin (3.1), y sean 1
0
y 1
1
los radios de conver-
gencia de las series de Taylor centradas en .
0
de a
0
(.) y a
1
(.), respectivamente. Entonces toda
solucin u de la ecuacin (3.1) es analtica en .
0
, es decir, se puede representar mediante la serie
de potencias
u(.) =
1
kD0
c
k
(. .
0
)
k
. (3.13)
siendo el radio de convergencia de esta serie mayor o igual que 1 = min(1
0
. 1
1
).
v Si .
0
es un punto regular de la ecuacin (3.1), las soluciones u
0
, u
1
(analticas en .
0
, como toda
solucin) que verican las condiciones iniciales
u
0
(.
0
) = 1 . u
0
0
(.
0
) = 0 :
u
1
(.
0
) = 0 . u
0
1
(.
0
) = 1 .
(3.14)
forman un sistema fundamental de soluciones, ya que su wronskiano vale 1 en .
0
. Como la so-
lucin (3.13) verica u(.
0
) = c
0
y u
0
(.
0
) = c
1
, dicha solucin se expresa en trminos de este
sistema fundamental como
u(.) = c
0
u
0
(.) c
1
u
1
(.) .
v Los coecientes c
k
R (k = 0. 1. . . . ) del desarrollo (3.13) se calculan sustituyendo la serie
anterior en la ecuacin diferencial (3.1) e igualando a cero los coecientes de las distintas potencias
de . .
0
en la expresin resultante. Ntese que, por las propiedades de las series de potencias,
para calcular u
00
y u
0
podemos derivar la serie (3.13) trmino a trmino.
Ejemplo 3.9. El Teorema (3.8) permite asegurar que las soluciones de la ecuacin (3.12) son analticas
en el origen con radio de convergencia mayor o igual que 2, es decir pueden representarse por una serie
de Maclaurin
u(.) =
1
kD0
c
k
.
k
(3.15)
convergente para [.[ < 2.
66 SOLUCIONES EN FORMA DE SERIE
Ejemplo 3.10. Consideremos la ecuacin con coecientes constantes
u
00
u = 0 . (3.16)
Como el polinomio caracterstico es (z) = z
2
1, la solucin general de esta ecuacin es (cf. Teore-
ma 2.31)
u(.) = e
x
e
x
. . R. (3.17)
En este caso todo punto .
0
R es regular, con 1 min(1
0
. 1
1
) = o (ya que los coecientes de la
ecuacin son constantes). Por tanto las soluciones de esta ecuacin son funciones analticas en todo R
(con radio de convergencia innito). Desarrollemos, por ejemplo, alrededor de .
0
= 0. Sustituyendo la
serie (3.15) en la ecuacin (3.16) obtenemos
1
kD2
k(k 1)c
k
.
k2
kD0
c
k
.
k
=
1
ID0
_
(l 2)(l 1)c
IC2
c
I
_
.
I
= 0 .
Igualando a cero el coeciente de .
I
en esta expresin obtenemos la siguiente relacin de recurrencia
que han de satisfacer los coecientes c
I
:
(l 2)(l 1)c
IC2
= c
I
. l = 0. 1. 2. . . . . (3.18)
La relacin anterior determina los coecientes pares en trminos de c
0
y los impares en trminos de
c
1
, ya que relaciona c
I
con c
IC2
(ntese que el coeciente de c
IC2
en (3.18) no se anula para ningn
l = 0. 1. . . . ). Los coecientes c
0
= u(0) y c
1
= u
0
(0) quedan indeterminados por la relacin de
recurrencia (3.18), lo cual es razonable, dado que la ecuacin (3.16) debe tener una solucin para todo
valor de las condiciones iniciales u(0) = c
0
y u
0
(0) = c
1
. La relacin de recurrencia (3.18) se resuelve
fcilmente. En efecto, si c
0
= 0 podemos escribir
c
2k
c
0
=
c
2k
c
2k2
c
2k2
c
2k4
c
2
c
0
=
1
2k(2k 1)
1
(2k 2)(2k 3)
1
2 1
=
1
(2k)
== c
2k
=
c
0
(2k)
.
expresin que es obviamente vlida tambin si c
0
= 0. Anlogamente, si c
1
= 0 entonces
c
2kC1
c
1
=
c
2kC1
c
2k1
c
2k1
c
2k3
c
3
c
1
=
1
(2k 1)(2k)
1
(2k 1)(2k 2)
1
3 2
=
1
(2k 1)
== c
2kC1
=
c
1
(2k 1)
.
que de nuevo vale tambin para c
1
= 0 en virtud de (3.18). La solucin general de la ecuacin (3.18) es
por tanto
u(.) = c
0
1
kD0
.
2k
(2k)
c
1
1
kD0
.
2kC1
(2k 1)
= c
0
cosh . c
1
senh . .
Esta expresin de la solucin general de (3.16) es equivalente a (3.17) con = (c
0
c
1
),2 y =
(c
0
c
1
),2.
Ejemplo 3.11. Consideremos a continuacin la ecuacin de Airy (3.5), para la cual todos los puntos
son regulares con 1 = o(pues los coecientes son polinomios). Desarrollando de nuevo alrededor de
.
0
= 0 obtenemos la expresin
1
kD2
k(k 1)c
k
.
k2
kD0
c
k
.
kC1
= 2c
2
ID1
_
(l 2)(l 1)c
IC2
c
I1
_
.
I
= 0 .
Puntos regulares. Ecuaciones de Hermite y Legendre 67
Igualando a cero los coecientes de las potencias de . obtenemos
c
2
= 0 (3.19)
junto con la relacin de recurrencia
(l 2)(l 1)c
IC2
= c
I1
. l = 1. 2. . . . . (3.20)
Ntese que ahora la relacin de recurrencia relaciona c
I
con c
IC3
. De esta propiedad y la ecuacin (3.19)
se sigue que
c
3kC2
= 0 . k = 0. 1. 2. . . . . (3.21)
Ahora c
0
determina todos los coecientes de ndice mltiplo de 3, mientras que c
1
determina los coe-
cientes c
3kC1
con k = 1. 2. . . . . Ms concretamente, para calcular c
3k
reescribamos la relacin de
recurrencia (3.20) en la forma
3k(3k 1) c
3k
= c
3k3
. k = 1. 2. . . . .
Si c
0
= 0 se tiene
c
3k
c
0
=
c
3k
c
3k3
c
3k3
c
3k6
c
3
c
0
=
1
3 k (3k 1)
1
3 (k 1) (3k 4)
1
3 1 2
== c
3k
=
c
0
3
k
k 2 5 (3k 1)
. k = 1. 2. . . . .
relacin vlida tambin para c
0
= 0. Ntese que la expresin anterior es tambin cierta para k = 0, ya
que en este caso el producto 2 5 (3k 1) tiene cero factores, y por convenio un producto con cero
factores se dene como 1. Anlogamente, de (3.20) se sigue que
3k(3k 1) c
3kC1
= c
3k2
. k = 1. 2. . . . .
y por tanto si c
1
= 0 se verica
c
3kC1
c
1
=
c
3kC1
c
3k2
c
3k2
c
3k5
c
4
c
1
=
1
3 k (3k 1)
1
3 (k 1) (3k 2)
1
3 1 4
== c
3kC1
=
c
1
3
k
k 4 7 (3k 1)
. k = 1. 2. . . . .
Al igual que antes, esta relacin es vlida tambin para k = 0. Por consiguiente la solucin general de
la ecuacin de Airy est dada por
u(.) = c
0
1
kD0
.
3k
3
k
k 2 5 (3k 1)
c
1
.
1
kD0
.
3k
3
k
k 4 7 (3k 1)
. (3.22)
Como los coecientes de la ecuacin de Airy son polinomios, el radio de convergencia de las series
(3.22) que denen a u(.) es innito.
3.1.2 La ecuacin de Hermite
Si en la ecuacin de Weber
00
(z .
2
) = 0 (3.23)
efectuamos el cambio de variable dependiente
(.) = e
x
2
2
u(.)
68 SOLUCIONES EN FORMA DE SERIE
obtenemos la ecuacin de Hermite
u
00
2. u
0
2ju = 0 . 2j z 1 R. (3.24)
Como los coecientes de esta ecuacin son polinomios, todo punto es regular, y el radio de conver-
gencia de la serie de Taylor centrada en cualquier punto de las soluciones de la ecuacin es innito. Si
desarrollamos alrededor del origen, sustituyendo
u(.) =
1
kD0
c
k
.
k
en la ecuacin obtenemos la identidad
1
kD2
k(k 1)c
k
.
k2
2
1
kD1
k c
k
.
k
2j
1
kD0
c
k
.
k
= 0
que podemos reescribir como sigue:
1
ID0
_
(l 2)(l 1) c
IC2
2(j l) c
I
_
.
I
= 0 .
De esta ecuacin se obtiene la relacin de recurrencia
(l 2)(l 1) c
IC2
= 2(j l) c
I
. l = 0. 1. . . . . (3.25)
Como el coeciente de c
IC2
no se anula para ningn l = 0. 1. . . . , la relacin anterior determina todos
los coecientes pares (impares) en trminos de c
0
(c
1
). Para calcular los coecientes pares escribimos
(3.25) para l = 2k 2 (k = 1. 2. . . . ), obteniendo
2k(2k 1) c
2k
= 2(j 2k 2) c
2k2
. k = 1. 2. . . . . (3.26)
Por tanto (suponiendo que c
0
= 0, ya que si c
0
= 0 todos los coecientes pares se anulan)
c
2k
c
0
=
c
2k
c
2k2
c
2k2
c
2k4
c
2
c
0
=
2(j 2k 2)
2k(2k 1)
2(j 2k 4)
(2k 2)(2k 3)
2j
2 1
=
(2)
k
(2k)
j(j 2) (j 2k 2)
y entonces
c
2k
=
(2)
k
(2k)
j(j 2) (j 2k 2) c
0
. k = 0. 1. . . . . (3.27)
Anlogamente, para los coecientes impares c
2kC1
la relacin de recurrencia se escribe
(2k 1)(2k) c
2kC1
= 2(j 2k 1) c
2k1
. k = 1. 2. . . . . (3.28)
por lo que (si c
1
= 0)
c
2kC1
c
1
=
c
2kC1
c
2k1
c
2k1
c
2k3
c
3
c
1
=
2(j 2k 1)
(2k 1)(2k)
2(j 2k 3)
(2k 1)(2k 2)
2(j 1)
3 2
=
(2)
k
(2k 1)
(j 1)(j 3) (j 2k 1) .
Por tanto
c
2kC1
=
(2)
k
(2k 1)
(j 1)(j 3) (j 2k 1) c
1
. k = 0. 1. . . . . (3.29)
Puntos regulares. Ecuaciones de Hermite y Legendre 69
expresin obviamente vlida tambin si c
1
= 0. Por tanto la solucin general de la ecuacin de Hermite
(3.24) es
u(.) = c
0
u
0
(.) c
1
u
1
(.) .
donde
u
0
(.) =
1
kD0
j(j 2) (j 2k 2)
(2)
k
(2k)
.
2k
(3.30)
y
u
1
(.) =
1
kD0
(j 1)(j 3) (j 2k 1)
(2)
k
(2k 1)
.
2kC1
. (3.31)
siendo ambas series convergentes para todo . R. Las funciones u
i
(.) (i = 0. 1) son ambas soluciones
de la ecuacin de Hermite (3.24), siendo u
0
una funcin par y u
1
impar, es decir
u
i
(.) = (1)
i
u
i
(.) . i = 0. 1 . (3.32)
Ntese que de las expresiones (3.30)-(3.31) se deduce que las funciones u
i
(.) satisfacen las condiciones
iniciales (3.14) en .
0
= 0.
Las funciones u
0
y u
1
, que como hemos visto anteriormente forman un sistema fundamental de
soluciones de la ecuacin de Hermite, se reducen a polinomios para ciertos valores del parmetro j
que aparece en la ecuacin. En efecto, la solucin par u
0
(.) se reduce a un polinomio si se anula el
coeciente c
2k
para algn valor de k = 1. 2. . . . , es decir si
j(j 2) (j 2k 2) = 0
para algn k. Esto slo es posible si j = 2n con n = 0. 1. . . . . En tal caso c
2nC2
se anula en virtud
de (3.27), lo cual implica que c
2kC2
= 0 si k > n por la relacin de recurrencia (3.26). En denitiva, si
j = 2n la solucin u
0
en (3.30) se reduce al polinomio
1
2n
(.) =
n
kD0
(1)
k
n
(n k)
(2.)
2k
(2k)
.
donde hemos tenido en cuenta la identidad
2n(2n 2) (2n 2k 2) = 2
k
n(n 1) (n k 1) = 2
k
n
(n k)
.
Por el contrario, la solucin impar u
1
no es polinmica cuando j = 2n, ya que
(2n 1)(2n 3) (2n 2k 1) = 0 . k = 1. 2. . . . .
La solucin u
1
ser sin embargo polinmica si j = 2n1 con n = 0. 1. . . . , ya que entonces c
2nC3
= 0
debido a la Ec. (3.29), lo cual implica (por la relacin de recurrencia) que c
2kC3
= 0 para k > n. En
este caso la solucin u
1
se reduce al polinomio
1
2nC1
(.) =
1
2
n
kD0
(1)
k
n
(n k)
(2.)
2kC1
(2k 1)
.
De nuevo, para estos valores de j la solucin par u
0
no se reduce a un polinomio.
Cuando la solucin u
i
(i = 0. 1) no se reduce a un polinomio (en particular, si j = 0. 1. 2. . . . ),
se prueba la correspondiente solucin
i
(.) = e
x
2
{2
u
i
(.) de la ecuacin de Weber (3.23) no es nor-
malizable [EDI2009]. En cambio, si j = n 2k i , con k = 0. 1. 2. . . . , entonces la ecuacin de
70 SOLUCIONES EN FORMA DE SERIE
Weber (3.23) tiene una nica solucin linealmente independiente normalizable (proporcional a
i
), de
energa
1 =
o
2
z =
o
2
(2j 1) = o
_
n
1
2
_
. n = 0. 1. 2. . . . . (3.33)
Esto demuestra que las energas de los estados ligados del oscilador armnico cuntico estn dadas por
la expresin (3.33). Dicha expresin fue deducida empricamente por Planck en 1900 para explicar la
distribucin de frecuencias del espectro de radiacin de un cuerpo negro, y con ella puede decirse que
comenz la Mecnica Cuntica.
Los polinomios de Hermite H
k
(.) (k = 0. 1. . . . ) son proporcionales a los polinomios 1
k
(.) que
acabamos de introducir. Ms precisamente, los polinomios de Hermite se suelen denir mediante las
frmulas
H
2n
(.) = (1)
n
(2n)
n
1
2n
(.) =
n
kD0
(1)
kCn
(2n)
(2k) (n k)
(2.)
2k
=
n
iD0
(1)
i
(2n)
i (2n 2i )
(2.)
2n2i
.
H
2nC1
(.) = 2(1)
n
(2n 1)
n
1
2nC1
(.) =
n
kD0
(1)
kCn
(2n 1)
(2k 1) (n k)
(2.)
2kC1
=
n
iD0
(1)
i
(2n 1)
i (2n 1 2i )
(2.)
2nC12i
.
Ambas frmulas se pueden englobar en la siguiente:
H
k
(.) =
k{2j
iD0
(1)
i
k
i (k 2i )
(2.)
k2i
. k = 0. 1. . . . . (3.34)
donde .| denota la parte entera de . (mayor entero menor igual que .). Al ser H
k
proporcional a 1
k
para todo k = 0. 1. . . . , H
k
es solucin de la ecuacin de Hermite (3.24) con j = k, es decir,
H
00
k
2. H
0
k
2k H
k
= 0 . k = 0. 1. . . . . (3.35)
Los primeros polinomios de Hermite son:
H
0
(.) = 1
H
1
(.) = 2 .
H
2
(.) = 4 .
2
2
H
3
(.) = 8 .
3
12 .
H
4
(.) = 16 .
4
48 .
2
12 .
Los polinomios de Hermite satisfacen diversas propiedades de inters que resumiremos a continua-
cin (vase [EDI2009] para su demostracin):
v Los polinomios de Hermite estn relacionados con los coecientes del desarrollo de la funcin
generatriz J(.. z) = e
2x;;
2
en potencias de z. Concretamente:
J(.. z) =
1
kD0
H
k
(.)
k
z
k
.
Puntos regulares. Ecuaciones de Hermite y Legendre 71
v Los polinomios de Hermite se pueden determinar utilizando la frmula de Rodrigues
H
k
(.) = (1)
k
e
x
2 d
k
d.
k
e
x
2
.
v Los polinomios de Hermite satisfacen la relacin de recurrencia a tres trminos
H
kC1
(.) = 2. H
k
(.) 2k H
k1
(.) . k = 0. 1. . . . .
v Los polinomios de Hermite verican la siguiente relacin de ortogonalidad en la recta real respecto
de la funcin peso e
x
2
:
_
1
1
H
n
(.) H
n
(.)e
x
2
d. = 2
n
n
_
nn
.
3.1.3 La ecuacin de Legendre
Uno de los mtodos ms usuales para resolver la ecuacin de Laplace .v = 0 en un sistema de coorde-
nadas ortogonales es el llamado mtodo de separacin de variables En coordenadas esfricas (r. 0. ),
el mtodo consiste en buscar soluciones de la forma
v(r. 0. ) =
1(r)
r
1(0)Q() .
Sustituyendo esta expresin en la ecuacin de Laplace en coordenadas esfricas
d
dr
_
r
2
dv
dr
_
1
sen 0
d
d0
_
sen 0
dv
d0
_
1
sen
2
0
d
2
v
d
2
= 0
se obtienen las tres ecuaciones diferenciales ordinarias siguientes:
1
00
(r)
( 1)
r
2
1(r) = 0 . (3.36a)
Q
00
() m
2
Q() = 0 . (3.36b)
1
sen 0
d
d0
_
sen 0 1
0
(0)
_
_
( 1)
m
2
sen
2
0
_
1(0) = 0 . (3.36c)
En las ecuaciones anteriores, my son dos constantes de separacin, y sin prdida de generalidad puede
suponerse que >
1
2
, ya que ( 1) = (
1
2
)
2
1
4
. Si en la Ec. (3.36c) con m = 0 hacemos el
cambio . = cos 0, llamando u(.) = 1(0) obtenemos inmediatamente la ecuacin de Legendre
(1 .
2
)u
00
2. u
0
( 1) u = 0 . (3.37)
Los coecientes de esta ecuacin
a
1
(.) =
2.
1 .
2
. a
0
(.) =
( 1)
1 .
2
: . = 1 . (3.38)
son funciones analticas en .
0
= 0, siendo los radios de convergencia de sus desarrollos de Taylor
centrados en dicho punto 1
0
= 1
1
= 1. Por el Teorema 3.8, la solucin general de la ecuacin de
Legendre se puede expresar mediante la serie de potencias
u(.) =
1
kD0
c
k
.
k
. (3.39)
72 SOLUCIONES EN FORMA DE SERIE
con radio de convergencia mayor o igual que 1. Sustituyendo la serie (3.39) en la ecuacin de Legendre
obtenemos
(1 .
2
)
1
kD2
k(k 1)c
k
.
k2
2
1
kD1
k c
k
.
k
( 1)
1
kD0
c
k
.
k
=
1
kD2
k(k 1)c
k
.
k2
kD0
_
k(k 1) 2k ( 1)
_
c
k
.
k
=
1
ID0
_
(l 2)(l 1)c
IC2
_
l(l 1) ( 1)
_
c
I
_
.
I
= 0 .
Igualando a cero el coeciente de .
I
en la expresin anterior se llega a la relacin de recurrencia
(l 2)(l 1)c
IC2
=
_
l(l 1) ( 1)
_
c
I
. l = 0. 1. . . . .
o equivalentemente,
c
IC2
=
( l)( l 1)
(l 2)(l 1)
c
I
. l = 0. 1. . . . . (3.40)
La relacin anterior determina todos los coecientes c
2k
(respectivamente c
2kC1
) en trminos de c
0
(respectivamente c
1
). Por ejemplo, los coecientes de las potencias pares estn dados por
c
2k
=
( 2k 2)( 2k 1)
2k(2k 1)
( 2k 4)( 2k 3)
(2k 2)(2k 3)
( 2)( 3)
4 3
( 1)
2 1
c
0
=
(1)
k
(2k)
( 2) ( 2k 2)( 1)( 3) ( 2k 1) c
0
. k = 0. 1. . . . . (3.41)
Anlogamente,
c
2kC1
=
( 2k 1)( 2k)
(2k 1)2k
( 2k 3)( 2k 2)
(2k 1)(2k 2)
( 1)( 2)
3 2
c
1
=
(1)
k
(2k 1)
( 1)( 3) ( 2k 1)( 2)( 4) ( 2k) c
1
. k = 0. 1. . . . .
(3.42)
Por tanto, la solucin general de la ecuacin de Legendre se puede expresar como
u(.) = c
0
u
0
(.) c
1
u
1
(.) .
donde las soluciones u
0
y u
1
verican las condiciones (3.32) y estn dadas por
u
0
(.) =
1
kD0
(1)
k
(2k)
( 2) ( 2k 2)( 1)( 3) ( 2k 1) .
2k
(3.43)
y
u
1
(.) =
1
kD0
(1)
k
(2k 1)
( 1)( 3) ( 2k 1)( 2)( 4) ( 2k) .
2kC1
. (3.44)
siendo ambas series convergentes para [.[ < 1. Para . = 1 (es decir, 0 = 0. ), no est garantizada
la convergencia de las series anteriores. De hecho, puede probarse que dichas series divergen en . =
1, salvo para aquellos valores de para los que se reducen a un polinomio. Al ser >
1
2
, de las
expresiones (3.43) y (3.44) se deduce que la solucin u
0
es un polinomio si = 2n, con n = 0. 1. . . . ,
Puntos regulares. Ecuaciones de Hermite y Legendre 73
mientras que la solucin u
1
es polinmica para = 2n 1, con n = 0. 1. . . . . Dichas soluciones
polinmicas son proporcionales a los polinomios de Legendre, denidos por
1
k
(.) =
1
2
k
k{2j
iD0
(1)
i
_
k
i
__
2k 2i
k
_
.
k2i
. k = 0. 1. . . . . (3.45)
En efecto, si = 2n entonces es fcil comprobar que
1
2n
(.) =
(1)
n
2
2n
_
2n
n
_
u
0
(.) .
mientras que si = 2n 1 entonces
1
2nC1
(.) =
(1)
n
2
2n
(n 1)
_
2n 1
n
_
u
1
(.) .
Los polinomios de Legendre de grado ms bajo se calculan fcilmente utilizando (3.45):
1
0
(.) = 1
1
1
(.) = .
1
2
(.) =
1
2
(3.
2
1)
1
3
(.) =
1
2
(5.
3
3.)
1
4
(.) =
1
8
(35.
4
30.
2
3) .
Al ser 1
k
proporcional a u
0
(si = k es par) o a u
1
(si = k es impar), dicho polinomio es solucin
de la ecuacin de Legendre (3.37) con = k, es decir,
(1 .
2
)1
00
k
2. 1
0
k
k(k 1) 1
k
= 0 . (3.46)
Los polinomios de Legendre satisfacen propiedades anlogas a los de Hermite. Concretamente:
v Funcin generatriz:
J(.. z) =
1
_
1 2.z z
2
=
1
kD0
1
k
(z)z
k
.
v Frmula de Rodrigues:
1
k
(.) =
1
2
k
k
d
k
d.
k
(.
2
1)
k
.
v Relacin de recurrencia:
(k 1)1
kC1
(.) (2k 1).1
k
(.) k1
k1
(.) = 0 . k = 0. 1. . . . .
v Relacin de ortogonalidad en el intervalo 1. 1|:
_
1
1
1
n
(.)1
n
(.) d. =
2
2n 1
nn
.
74 SOLUCIONES EN FORMA DE SERIE
3.2 Puntos singulares regulares
Estudiaremos a continuacin el comportamiento de las soluciones de la ecuacin lineal homognea de
segundo orden (3.1) en las proximidades de un punto singular .
0
R, es decir tal que al menos uno de
los dos coecientes a
i
(.) de la ecuacin no es analtico en .
0
.
Ejemplo 3.12. Posiblemente la ecuacin ms sencilla de la forma (3.1) que es resoluble elementalmente
y tiene un punto singular es la ecuacin de Euler de segundo orden
.
2
u
00
0
. u
0
q
0
u = 0 .
0
. q
0
R. (3.47)
En efecto, es claro que si
0
y q
0
no son ambos nulos entonces el origen es un punto singular de (3.47).
Por otra parte, la ecuacin se resuelve fcilmente mediante el cambio de variable dependiente
t = log [.[ . . = 0 .
ya que si
,(t ) = u(.)
entonces
d.
dt
=
_
dt
d.
_
1
= ., por lo que
d,
dt
= u
0
(.)
d.
dt
= . u
0
(.) .
d
2
,
dt
2
= .
2
u
00
(.) . u
0
(.) .
Por tanto ,(t ) satisface la ecuacin lineal homognea de coecientes constantes
d
2
,
dt
2
(
0
1)
d,
dt
q
0
, = 0 . (3.48)
cuyo polinomio caracterstico es
(r) = r
2
(
0
1) r q
0
= r(r 1)
0
r q
0
. (3.49)
Si r
i
(i = 1. 2) son las dos races (posiblemente complejas) de (3.49), la solucin general de la ecuacin
(3.48) est dada por
,(t ) =
c
1
e
i
1
t
c
2
e
i
2
t
. si r
1
= r
2
. r
1
. r
2
R
(c
1
c
2
t )e
it
. si r
1
= r
2
r R
_
c
1
cos( t ) c
2
sen( t )
_
e
t
. si r
1,2
= i C.
Por tanto, la solucin general de la ecuacin de Euler (3.47) es
u(.) =
c
1
[.[
i
1
c
2
[.[
i
2
. si r
1
= r
2
. r
1
. r
2
R
(c
1
c
2
log [.[)[.[
i
. si r
1
= r
2
r R
_
c
1
cos( log [.[) c
2
sen( log [.[)
_
[.[
. si r
1,2
= i C.
(3.50)
Obsrvese que para ciertos valores de las races r
1
y r
2
(o, lo que es lo mismo, de los coecientes
0
y q
0
), algunas o incluso todas las soluciones de la ecuacin de Euler (3.47) pueden ser analticas en
. = 0, aunque los coecientes de la ecuacin no lo sean. Ms concretamente, si r
1
= r
2
son enteros
no negativos entonces todas las soluciones son analticas en . = 0, mientras que si r
1
= r
2
r es un
entero no negativo entonces hay una sla solucin linealmente independiente analtica en . = 0, a saber
u(.) = .
i
. (Por qu se puede sustituir [.[
i
i
por .
i
i
en (3.50) si r
i
es un entero impar?)
Puntos singulares regulares 75
A pesar de que la ecuacin de Euler (3.47) no admite en general una solucin analtica en el punto
singular . = 0, es evidente que siempre posee al menos una solucin de la forma
u(.) = [.[
i
.
siendo r una de las races del polinomio caracterstico (3.49) (evidentemente, si r
1,2
son complejas
entonces esta solucin es tambin compleja). Podra pensarse que si .
0
es un punto singular de la ecua-
cin (3.1) entonces dicha ecuacin admite siempre alguna solucin no trivial de la forma
u(.) = [. .
0
[
i
(.) . (3.51)
con analtica en .
0
. El ejemplo siguiente demuestra que esto no es cierto en general:
Ejemplo 3.13. Consideremos la ecuacin
.
2
u
00
u
0
3
4
u = 0 . (3.52)
que evidentemente tiene un punto singular en . = 0. Supongamos que la ecuacin admitiera una solucin
de la forma
u(.) = [.[
i
(.) .
con
(.) =
1
kD0
c
k
.
k
analtica en . = 0. Ntese que podemos suponer, sin prdida de generalidad, que c
0
= 0, ya que en caso
contrario bastara redenir adecuadamente r. Si . > 0, podemos expresar la solucin anterior mediante
la serie
u(.) =
1
kD0
c
k
.
iCk
. . > 0 . (3.53)
Sustituyendo en la ecuacin obtenemos
1
kD0
(r k)(r k 1)c
k
.
iCk
kD0
(r k)c
k
.
iCk1
3
4
1
kD0
c
k
.
iCk
= rc
0
.
i1
kD0
_
_
(r k)(r k 1)
3
4
_
c
k
(r k 1)c
kC1
_
.
iCk
= 0 .
Igualando a cero el coeciente del trmino en .
i1
se obtiene la condicin r = 0. El coeciente del
trmino general .
iCk
.
k
con k = 0. 1. . . . proporciona entonces la relacin de recurrencia
(k 1)c
kC1
=
_
k
1
2
__
k
3
2
_
c
k
. k = 0. 1. . . . .
La ecuacin anterior determina todos los coecientes c
k
con k > 0, ya que k1 = 0 para k = 0. 1. . . . .
Adems, al ser (k
1
2
)(k
3
2
) = 0 para k = 0. 1. . . . , todos los coecientes c
k
son no nulos, por lo
que (3.53) es una serie innita. Por el criterio del cociente, el radio de convergencia de dicha serie est
dado por
1 = lim
k!1
c
k
c
kC1
= lim
k!1
k 1
(k
1
2
)(k
3
2
)
= 0 .
Luego la serie (3.53) slo converge en . = 0, y por tanto la ecuacin (3.52) no tiene ninguna solucin
de la forma (3.51) con analtica en . = 0.
76 SOLUCIONES EN FORMA DE SERIE
Supongamos que .
0
es un punto singular de la ecuacin (3.1), de modo que no es aplicable el Teo-
rema 3.8. Veremos ms adelante que la ecuacin (3.1) admite al menos una solucin no trivial de la
forma (3.51), con analtica en .
0
, siempre que sus coecientes a
i
(.) (i = 0. 1) sean de la forma
a
1
(.) =
(.)
. .
0
. a
0
(.) =
q(.)
(. .
0
)
2
. . = .
0
. (3.54)
con y q funciones analticas en .
0
.
Denicin 3.14. Diremos que un punto singular .
0
de la ecuacin (3.1) es un punto singular regular
de dicha ecuacin si sus coecientes son de la forma (3.54), siendo y q funciones analticas en .
0
.
En otras palabras, para que una singularidad .
0
sea un punto singular regular de la ecuacin (3.1) las
funciones y q denidas por
(.) = (. .
0
) a
1
(.) . q(.) = (. .
0
)
2
a
0
(.) (3.55)
para . = .
0
y
(.
0
) = lim
x!x
0
_
(. .
0
)a
1
(.)
_
0
. q(.
0
) = lim
x!x
0
_
(. .
0
)
2
a
0
(.)
_
q
0
han de ser analticas en .
0
. Por ejemplo, es inmediato comprobar que .
0
= 0 es un punto singular regular
de la ecuacin de Euler (3.47), con (.) =
0
y q(.) = q
0
funciones constantes. Por analoga con la
ecuacin de Euler (3.47) (cf. la Ec. (3.49)), si .
0
es un punto singular regular de la Ec. (3.1) se dene su
polinomio indicial mediante
J(r) = r(r 1)
0
r q
0
. (3.56)
con
0
y q
0
dados por la frmula anterior.
Ejemplo 3.15. Consideremos la ecuacin
. u
00
u
0
log [.[ u = 0 . (3.57)
Todo punto .
0
= 0 es un punto regular, ya que los coecientes de la ecuacin
a
1
(.) =
1
.
. a
0
(.) =
log [.[
.
. . = 0 .
son funciones analticas en .
0
= 0. En efecto, 1,. es el cociente de las funciones analticas 1 y ., siendo
el denominador no nulo en .
0
. De hecho, la serie de Taylor centrada en .
0
de 1,. se puede calcular por
mtodos elementales:
1
.
=
1
(. .
0
) .
0
=
1
.
0
1
1
. .
0
.
0
=
1
kD0
(1)
k
.
kC1
0
(. .
0
)
k
. [. .
0
[ < [.
0
[ .
Por otra parte,
log jxj
x
es analtica en .
0
= 0, al ser el producto de dos funciones analticas en .
0
(1,. y
log [.[). Recurdese que log [.[ es analtica en todo punto .
0
= 0, ya que
log [.[ = log [.
0
[ log
1
. .
0
.
0
jxx
0
j~jx
0
j
= log [.
0
[ log
_
1
. .
0
.
0
_
= log [.
0
[
1
kD1
(1)
kC1
k .
k
0
(. .
0
)
k
. [. .
0
[ < [.
0
[ .
El punto .
0
= 0 es un punto singular de la ecuacin (3.57), ya que es singularidad de ambos coecientes
de la ecuacin. Para que dicho punto sea un punto singular regular, las funciones
(.) = . a
1
(.) = 1 . q(.) = .
2
a
0
(.) = . log [.[ (. = 0) .
Puntos singulares regulares 77
han de ser analticas en 0. Pero esto es falso, ya que aunque es analtica (constante) en R, y existe
lim
x!0
q(.) = 0 .
q no es ni siquiera una vez derivable en el origen. Por tanto, 0 es un punto singular irregular de la
ecuacin (3.57).
El siguiente teorema, debido a G. Frobenius (1874), es de gran importancia prctica, ya que describe
con gran precisin el comportamiento de las soluciones de la ecuacin lineal homognea (3.1) en las
proximidades de un punto singular regular .
0
. Por sencillez, supondremos que .
0
= 0 (lo que siempre
puede conseguirse con el cambio de variable independiente t = . .
0
), y por tanto escribiremos la
ecuacin (3.1) en la forma
.
2
u
00
.(.)u
0
q(.)u = 0 . (3.58)
con
(.) =
1
kD0
k
.
k
. q(.) =
1
kD0
q
k
.
k
. [.[ < 1. (3.59)
Teorema de Frobenius. Sean r
1
y r
2
las races del polinomio indicial (3.56) de (3.58), numeradas
de forma que
Re r
1
> Re r
2
. (3.60)
Entonces se tiene:
i) Si r
1
= r
2
y r
1
r
2
N, la ecuacin (3.58) tiene un sistema fundamental de soluciones de la
forma
u
i
(.) = [.[
i
i
i
(.) . i = 1. 2 . (3.61)
con
i
analtica en 0 y
i
(0) = 1.
ii) Si r
1
= r
2
r, (3.58) admite el sistema fundamental de soluciones
u
1
(.) = [.[
i
1
(.) . u
2
(.) = u
1
(.) log [.[ [.[
i
2
(.) . (3.62)
con
i
analtica en 0,
1
(0) = 1 y
2
(0) = 0.
iii) Si r
1
r
2
n N, (3.58) posee el sistema fundamental de soluciones
u
1
(.) = [.[
i
1
1
(.) . u
2
(.) = (sgn .)
n
c u
1
(.) log [.[ [.[
i
2
2
(.) . (3.63)
con
i
analtica en 0,
i
(0) = 1 y c R constante (posiblemente nula).
En todos los casos, el radio de convergencia de la serie de Taylor centrada en 0 de
i
(i = 1. 2) es
mayor o igual que 1.
Ntese que en el caso i) las races pueden ser complejas, es decir r
1,2
= i. En tal caso es conveniente
reemplazar las soluciones complejas (3.61) por el sistema fundamental de soluciones reales
[.[
_
n
1
(.) cos( log [.[) .n
2
(.) sen( log [.[)
_
.
[.[
_
n
1
(.) sen( log [.[) .n
2
(.) cos( log [.[)
_
.
(3.64)
donde de nuevo n
i
es (real) y analtica con radio de convergencia al menos 1 en 0, y n
1
(0) = 1.
78 SOLUCIONES EN FORMA DE SERIE
Demostracin. Nos limitaremos a dar a continuacin una justicacin heurstica del teorema de Frobe-
nius, evitando entrar en detalles tcnicos como, por ejemplo, la vericacin de la convergencia de las
series que utilizaremos. La idea de la prueba es ensayar una solucin del tipo
u(.) = [.[
i
1
kD0
c
k
.
k
. con c
0
= 0 . (3.65)
e intentar calcular el exponente r y los coecientes c
i
sustituyendo (3.65) en la ecuacin (3.58). Para
jar ideas, supondremos en lo que sigue que . > 0. Sustituyendo entonces (3.65) en (3.58) se obtiene
1
kD0
(k r)(k r 1)c
k
.
kCi
_
1
}D0
}
.
}
__
1
kD0
(k r)c
k
.
kCi
_
_
1
}D0
q
}
.
}
__
1
kD0
c
k
.
kCi
_
=
1
ID0
_
(l r)(l r 1)c
I
I
kD0
_
(k r)
Ik
q
Ik
_
c
k
_
.
ICi
= 0 .
Igualando a cero los coecientes de las potencias de . se obtiene
(l r)(l r 1) c
I
I
kD0
_
(k r)
Ik
q
Ik
_
c
k
= 0 . l = 0. 1. . . . . (3.66)
Haciendo l = 0 queda
_
r(r 1)
0
r q
0
_
c
0
J(r)c
0
= 0 .
y por tanto
J(r) = 0 . (3.67)
La ecuacin (3.67) implica que r slo puede ser igual a una de las dos races r
1,2
del polinomio indicial.
Si l = 1. 2. . . . reescribimos (3.66) como
_
(l r)(l r 1) (l r)
0
q
0
_
c
I
=
I1
kD0
_
(k r)
Ik
q
Ik
_
c
k
. l = 1. 2. . . . .
Teniendo en cuenta la denicin del polinomio indicial (3.56) se obtiene nalmente la relacin de recu-
rrencia
J(r l)c
I
=
I1
kD0
_
(k r)
Ik
q
Ik
_
c
k
. l = 1. 2. . . . . (3.68)
Si r = r
1
, es fcil ver que la ecuacin anterior determina todos los coecientes c
I
con l = 1. 2. . . . en
trminos de c
0
. En efecto, la condicin necesaria y suciente para que esto ocurra es que c
I
se pueda
despejar de (3.68) en trminos de c
0
. . . . . c
I1
para todo l = 1. 2. . . . . A su vez, esto es equivalente a
que
J(r
1
l) = 0 . l = 1. 2. . . . .
Si esto no se cumpliera para algn l = 1. 2. . . . entonces J tendra la raz r
2
= r
1
l con Re r
2
=
Re r
1
l > Re r
1
, en contra de la denicin (3.60) de r
1
. Esto demuestra que la ecuacin (3.58) siempre
posee una solucin no trivial de la forma
u
1
(.) = .
i
1
1
(.) (. > 0) (3.69)
con
1
(.) =
1
ID0
c
I
.
I
.
Puntos singulares regulares 79
donde los coecientes c
I
se determinan en funcin de c
0
mediante la relacin de recurrencia (3.68). Se
demuestra que la serie de potencias que dene a
1
tiene radio de convergencia mayor o igual que 1, y
que por tanto
1
es analtica en 0. Adems, podemos suponer sin prdida de generalidad que c
0
= 1, es
decir
1
(0) = 1. Ntese que si r
1
r
2
N, se cumple tambin la condicin
J(r
2
l) = 0 . l = 1. 2. . . . .
Por tanto en este caso la ecuacin (3.58) posee tambin una segunda solucin de la forma
u
2
(.) = .
i
2
2
(.) (. > 0)
con
2
analtica en 0 y
2
(0) = 1. Si r
2
= r
1
es obvio que esta solucin es linealmente independiente de
la anterior, ya que el cociente de ambas soluciones no es constante (es de la forma .
i
2
i
1
por una funcin
analtica que vale 1 en el origen). Con esto queda por tanto probado el primer apartado del teorema.
Supongamos a continuacin que
r
1
r
2
= n con n = 0. 1. . . . .
Utilizando la solucin (3.69) podemos construir una segunda solucin linealmente independiente de la
ecuacin aplicando la frmula (2.53), es decir
u
2
(.) = u
1
(.)
_
x
t
2i
1
2
1
(t )
e
_
t
o
1
(x) dx
dt . (3.70)
Al ser el origen un punto singular regular de la ecuacin (3.58) se tiene
_
t
a
1
(s) ds =
_
t
(s)
s
ds =
0
log t (t )
siendo
(t ) =
_
t
1
kD1
k
s
k1
ds =
1
kD1
k
k
t
k
.
Se demuestra que (t ) es una funcin analtica en el origen, con (0) = 0. Sustituyendo en la frmula
(3.70) se obtiene
u
2
(.) = u
1
(.)
_
x
t
]
0
2i
1
e
(t)
2
1
(t )
dt u
1
(.)
_
x
t
]
0
2i
1
[(t ) dt . (3.71)
con
[(t ) =
e
(t)
2
1
(t )
kD0
b
k
t
k
analtica en el origen (cociente de dos funciones analticas con denominador no nulo en 0) y
b
0
= [(0) =
e
(0)
2
1
(0)
= 1 = 0 .
De la denicin (3.56) del polinomio indicial J(r) se sigue que
r
1
r
2
= 1
0
==
0
2r
1
= r
2
r
1
1 = n 1 .
De (3.71) se deduce por tanto que
u
2
(.) = u
1
(.)
_
x
t
n1
[(t ) dt = u
1
(.)
_
x
1
kD0
b
k
t
kn1
dt
= b
n
u
1
(.) log . u
1
(.)
1
kD0
kn
b
k
k n
.
kn
b
n
u
1
(.) log . .
i
2
n(.) . (3.72)
80 SOLUCIONES EN FORMA DE SERIE
con
n(.) =
1
(.)
1
kD0
kn
b
k
k n
.
k
.
De nuevo, se demuestra que n es analtica en el origen, siendo
n(0) =
0 . n = 0
b
0
n
=
1
n
= 0 . n = 1. 2. . . . .
Esto demuestra los dos ltimos apartados del teorema de Frobenius, ya que si n = 0 el coeciente del
trmino u
1
(.) log . es b
0
= 1.
Igual que en un punto regular, los coecientes de las funciones analticas
i
que aparecen en el teore-
ma de Frobenius se obtienen sustituyendo en la ecuacin diferencial (3.58) las expresiones (3.61)(3.63).
Sin embargo, si las races de la ecuacin indicial dieren en un entero aparece la dicultad adicional de
la posible presencia de un trmino logartmico, que slo es segura si la ecuacin indicial tiene una raz
doble.
Si r
1
r
2
= n N. para determinar si aparece o no un trmino logartmico en la segunda solucin
u
2
(.) lo ms eciente es empezar asumiendo que dicho trmino no aparece, y buscar por tanto una
solucin del tipo
.
i
2
1
kD0
c
k
.
k
(. > 0) (3.73)
con c
0
= 0. Como J(r
2
l) = 0 para l = 1. 2. . . . . n 1, la relacin de recurrencia (3.68) determina
los coecientes c
1
. . . . . c
n1
en funcin de c
0
. Para l = n, sin embargo, J(r
2
n) = J(r
1
) = 0, y por
tanto la relacin de recurrencia se reduce a la ecuacin
n1
kD0
_
(k r
2
)
nk
q
nk
_
c
k
= 0 . (3.74)
Si los coecientes c
0
. . . . . c
n1
calculados precedentemente no verican la ecuacin anterior, hemos
llegado a una contradiccin, y por tanto ha de haber necesariamente un trmino logartmico en la segunda
solucin (es decir, c = 0 en (3.63)). Por el contrario, si se cumple (3.74) la relacin de recurrencia
permite calcular c
I
con l > n, ya que J(r
2
l) = 0 para l > n. Ntese que el coeciente c
n
es
arbitrario. Pero esto es lgico, ya que c
n
multiplica a .
i
2
Cn
= .
i
1
, y el coeciente de este trmino se
puede asignar a voluntad aadiendo un mltiplo adecuado de la primera solucin (3.69). En denitiva, la
condicin necesaria y suciente para que haya una segunda solucin de (3.58) del tipo (3.73), es decir
sin trmino logartmico, es que se cumpla (3.74).
Supongamos a continuacin que r
1
= r
2
r, por lo que la presencia del trmino logartmico est
garantizada. Para calcular la segunda solucin en este caso, sean c
I
(s) (l = 1. 2. . . . ) los coecientes
determinados por la relacin de recurrencia (3.68) con r = s, es decir
J(s l) c
I
(s) =
I1
kD0
_
(k s)
Ik
q
Ik
_
c
k
(s) . l = 1. 2. . . . . (3.75)
junto con la condicin c
0
= 1. Ntese que esta relacin determina todos los coecientes c
I
(s) si r s
N, ya que J slo se anula en r; en particular, los coecientes estn denidos para [s r[ < 1. Si se
cumple esta condicin s no es una raz del polinomio indicial, y por tanto la funcin
u(.. s) = .
x
1
kD0
c
k
(s).
k
(. > 0)
Puntos singulares regulares 81
no es solucin de la ecuacin (3.58). Ms precisamente, teniendo en cuenta la forma en que se obtuvo la
relacin de recurrencia (3.68) es fcil ver que
1
_
u(.. s)
_
.
2
u
00
.(.)u
0
q(.)u = J(s).
x
.
Derivando esta ecuacin respecto de s y haciendo s = r se obtiene:
d
ds
xDi
1
_
u(.. s)
_
= 1
_
d
ds
xDi
u(.. s)
_
= J
0
(r).
i
J(r).
i
log . = 0 .
ya que r es por hiptesis raz doble de J. Esto prueba que la funcin
d
ds
xDi
u(.. s) = u(.. r) log . .
i
1
kD0
c
0
k
(r).
k
u
1
(.) log . .
i
1
kD0
c
0
k
(r).
k
es solucin de la ecuacin lineal homognea (3.58) si r es una raz doble del polinomio indicial (3.49).
3.2.1 La ecuacin de Bessel
La ecuacin
.
2
u
00
.u
0
(.
2
v
2
)u = 0 . . > 0 . (3.76)
donde v > 0 es un parmetro real, recibe el nombre de ecuacin de Bessel. Esta ecuacin es de gran
importancia en Fsica, ya que se obtiene al separar variables en la ecuacin de Laplace en coordenadas
cilndricas (donde . representa la coordenada radial). El origen es un punto singular de la ecuacin de
Bessel, ya que a
1
(.) = 1,. no es analtica en . = 0 (tampoco lo es a
0
(.) = 1 (v,.)
2
, si v > 0). De
hecho, este punto es singular regular, ya que (3.76) es de la forma (3.58) con
(.) = 1 . q(.) = .
2
v
2
(3.77)
funciones analticas en 0 (polinomios). Como
0
= 1 . q
0
= v
2
. (3.78)
el polinomio indicial es
J(r) = r(r 1) r v
2
= r
2
v
2
. (3.79)
Las races del polinomio indicial son por tanto
r
1
= v . r
2
= v (3.80)
(recurdese que r
1
siempre designa a la raz de parte real mayor), siendo su diferencia
r
1
r
2
= 2v . (3.81)
Busquemos, en primer lugar, la solucin del tipo (3.65), que en este caso ser de la forma
u
1
(.) =
1
kD0
c
k
.
kC
(. > 0) .
Sustituyendo en la ecuacin de Bessel se obtiene
1
kD0
_
(k v)(k v 1) (k v) v
2
)
_
c
k
.
kC
kD0
c
k
.
kCC2
= (1 2v)c
1
.
C1
ID2
_
l(l 2v)c
I
c
I2
_
.
IC
= 0 .
82 SOLUCIONES EN FORMA DE SERIE
Igualando a cero los coecientes de las potencias de . en el miembro derecho de esta expresin obtene-
mos la condicin
c
1
= 0 . (3.82)
junto con la relacin de recurrencia
l(l 2v)c
I
= c
I2
. l = 2. 3. . . . . (3.83)
Como (3.83) relaciona el coeciente c
I
con c
I2
, los coecientes pares (impares) son proporcionales a
c
0
(c
1
), de donde se deduce que
c
2kC1
= 0 . k = 0. 1. . . . . (3.84)
Llamando
c
2k
= b
k
. k = 0. 1. . . . .
la relacin de recurrencia (3.83) se transforma en
4k(k v) b
k
= b
k1
. k = 1. 2. . . . . (3.85)
Como el coeciente de b
k
en esta relacin no se anula para ningn k > 0 (ya que v > 0), (3.85)
determina todos los coecientes b
k
con k = 1. 2. . . . en trminos de b
0
. Ms concretamente, de (3.85)
se obtiene fcilmente
b
k
=
(1)
k
2
2k
k (v k)(v k 1) (v 1)
b
0
. k = 1. 2. . . . . (3.86)
Tomando b
0
= 2
obtenemos la siguiente solucin de la ecuacin de Bessel:
u
1
(.) =
1
kD0
(1)
k
k(v k) (v 2)(v 1)
_
.
2
_
2kC
. (3.87)
Por el teorema de Frobenius, la serie que dene esta funcin es convergente para todo . R, ya que
los coecientes y q son polinomios. (Esto tambin se puede comprobar directamente en este caso
utilizando el criterio del cociente.)
Para simplicar los coecientes en la frmula anterior utilizaremos algunas propiedades de la fun-
cin gamma de Euler, denida por
1(z) =
_
1
0
t
;1
e
t
dt . Re z > 0 . (3.88)
La integral converge absolutamente si z = . i, con . > 0, ya que
_
1
0
[t
;1
[e
t
dt =
_
1
0
t
x1
e
t
dt =
_
1
0
t
x1
e
t
dt
_
1
1
t
x1
e
t
dt 1
1
1
2
.
siendo 1
1
e 1
2
convergentes. En efecto, 1
1
converge por tener el mismo carcter que
_
1
0
t
x1
dt , mientras
que 1
2
lo hace al ser
_
1
1
e
t{2
dt convergente y
lim
t!1
t
x1
e
t
e
t{2
= 0 .
Se demuestra que la funcin 1 denida por (3.88) es analtica en el semiplano Re z > 0. Integrando por
partes se prueba fcilmente que 1 satisface la relacin funcional fundamental
1(z 1) = z 1(z) . (3.89)
Puntos singulares regulares 83
Como
1(1) =
_
1
0
e
t
dt = 1 .
de la relacin funcional se deduce inmediatamente que
1(n 1) = n n = 0. 1. . . . .
Por tanto la funcin 1 es una generalizacin del factorial. Por ejemplo, para . =
1
2
el valor de esta
funcin es
1
_
1
2
_
=
_
1
0
t
1
2
e
t
dt
tDx
2
= 2
_
1
0
e
x
2
d. =
_
. (3.90)
La funcin 1 se extiende fcilmente al semiplano izquierdo utilizando la relacin funcional (3.89).
Por ejemplo, si 1 < Re z 6 0 entonces se dene
1(z) =
1(z 1)
z
.
donde el miembro derecho est bien denido y es analtico para z = 0. De esta forma se obtiene una
funcin analtica en todo el plano complejo, excepto en los puntos z = k con k = 0. 1. 2. . . . . donde
se prueba que 1 tiene polos simples (es decir, diverge como (z k)
1
cuando z k). Por ltimo,
se demuestra que la funcin 1 no tiene ceros en el plano complejo. Por tanto, la funcin 1,1 es entera
(analtica en todo el plano complejo), y se anula slo en los enteros negativos y en el origen.
-4 -2 2 4
-15
-10
-5
5
10
15
x
Figura 3.1: Grca de la funcin 1(.). Ntense, en particular, las asntotas verticales en los puntos
. = 0. 1. 2. . . . .
Utilizando la relacin funcional (3.89) repetidamente se obtiene
1(v k 1) = (v k) (v 2)(v 1)1(v 1) .
Multiplicando la solucin u
1
(.) por la constante 1,1(v 1) (no nula, ya que v > 0) se llega a la
siguiente solucin de la ecuacin de Bessel (3.76)
J
(.) =
1
kD0
(1)
k
k 1(v k 1)
_
.
2
_
2kC
. . > 0 . (3.91)
84 SOLUCIONES EN FORMA DE SERIE
que se denomina funcin de Bessel de primera especie y orden v. Ntese que J
0
(0) = 1, mientras que
para v > 0 la funcin J
(.) se anula en el origen (vase la Fig. 3.2):
J
(0) = 0 . v > 0 .
Sin embargo, J
slo es analtica en . = 0 si v = 0. 1. . . . . ya que .
slo es analtica en el origen para
estos valores de v.
Hallemos, a continuacin, la segunda solucin. Si
2v = 0. 1. . . . . (3.92)
por el teorema de Frobenius la segunda solucin de la ecuacin de Bessel es de la forma
u
2
(.) =
1
kD0
c
k
.
k
.
Repitiendo el clculo anterior con v reemplazado por v se obtiene la solucin de la ecuacin de Bessel
dada por
J
(.) =
1
kD0
(1)
k
k 1(k v 1)
_
.
2
_
2k
. . > 0 . (3.93)
linealmente independiente de (3.91). Por tanto, si 2v = 0. 1. . . . la solucin general de la ecuacin de
Bessel es
u(.) = C
1
J
(.) C
2
J
(.) . (3.94)
con C
1
y C
2
constantes arbitrarias.
De hecho, la funcin J
denida por la Ec. (3.93) tiene sentido para cualquier valor de v > 0. Si
v = 1. 2. . . . entonces 1,1(1 v) = 0, y por tanto J
(.) diverge cuando . 0 si v = 0. 1. . . .
(vase la Fig. 3.2):
J
(.) -
x!0
2
1(1 v)
.
(v = 0. 1. . . . ) . (3.95)
5 10 15 20 25 30
0.5
0.5
1.0
x
Figura 3.2: Grca de las funciones J
0
(.) (verde), J
p
2
(.) (azul) y J
p
2
(.) (rojo).
Puntos singulares regulares 85
Determinemos ahora la segunda solucin cuando
2v = 0. 1. . . . .
Ntese que si v = 0 el teorema de Frobenius implica que dicha solucin tiene un trmino logartmico,
que puede no aparecer si 2v = 1. 2. . . . . Distinguiremos dos subcasos, segn v sea semientero o entero.
En primer lugar, si
v =
1
2
.
3
2
. . . .
no hay trmino logartmico. Esto se podra comprobar estudiando la relacin de recurrencia para la
segunda raz (v) de la ecuacin indicial, o ms fcilmente observando que en este caso J
sigue
siendo solucin de la ecuacin de Bessel (ya que dicha ecuacin no cambia si se sustituye v por v), y
no es proporcional a J
(.). En efecto, J
se anula en el origen para v > 0, mientras que la solucin J
diverge en 0 como .
para v =
1
2
.
3
2
. . . . (vase la Ec. (3.95)). De hecho, se puede probar que si m Z
entonces
J
nC
1
2
(.) =
n
_
1
_
.
_
cos . T
n
_
1
_
.
_
sen . . (3.96)
con
n
y T
n
polinomios. (Se puede probar J
slo es una funcin elemental si v es semientero.) Por
ejemplo, si m = 0 entonces
1(k
3
2
) = (k
1
2
)(k
1
2
)
1
2
1(
1
2
) =
1
2
kC1
(2k 1)(2k 1) 3 1
_
=
(2k 1)
2
2kC1
k
_
.
donde hemos utilizado las identidades (3.89) y (3.90). Sustituyendo esta expresin en la denicin (3.91)
de J
(con v =
1
2
) se obtiene fcilmente
J1
2
(.) =
_
2
.
sen . . (3.97a)
Anlogamente se demuestra que
J
1
2
(.) =
_
2
.
cos . . (3.97b)
En denitiva, la solucin general de la ecuacin de Bessel para v semientero sigue estando dada por la
Ec. (3.94).
Veamos a continuacin que si
v = 1. 2. . . .
entonces la segunda solucin de la ecuacin de Bessel contiene un trmino logartmico. Una indicacin
de este hecho es que si v N la funcin J
es proporcional a J
. En efecto, en este caso
1
1(k v 1)
= 0 . k = 0. 1. . . . . v 1 .
Por tanto
J
(.) =
1
kD
(1)
k
k 1(k v 1)
_
.
2
_
2k
=
1
ID0
(1)
IC
(l v) 1(l 1)
_
.
2
_
2IC
=
1
ID0
(1)
IC
1(l v 1) l
_
.
2
_
2IC
= (1)
(.) . v = 1. 2. . . . .
Para probar que en este caso (v N) hay un trmino logartmico, ntese que la relacin de recurrencia
para la hipottica solucin
u
2
(.) = .
kD0
c
k
.
k
86 SOLUCIONES EN FORMA DE SERIE
es simplemente (3.82) y (3.83) con v reemplazado por v, es decir
c
1
= 0 : l(l 2v) c
I
= c
I2
. l = 2. 3. . . . .
De nuevo, todos los coecientes impares son cero, y los coecientes pares b
k
= c
2k
se determinan por
4k(k v) b
k
= b
k1
. k = 1. 2. . . . .
Esta relacin determina b
1
. . . . . b
1
en trminos de b
0
, siendo todos estos coecientes no nulos si
b
0
= 0. Sin embargo, en este caso la relacin que debera determinar b
se reduce a
0 = b
1
.
que es contradictoria, ya que b
1
= 0 si b
0
= 0 .
Como ya se ha mencionado, si v = 0 en la segunda solucin de la ecuacin de Bessel aparece un
trmino logartmico. De acuerdo con el teorema de Frobenius, dicha solucin es de la forma
u
2
(.) = J
0
(.) log .
2
(.) J
0
(.) log .
1
kD0
c
k
.
k
. con c
0
= 0 .
Sustituyendo esta expresin en la ecuacin de Bessel para v = 0 se obtiene
(. J
00
0
J
0
0
. J
0
) log . 2 J
0
0
.
00
2
0
2
.
2
= 0 .
o bien, ya que J
0
es solucin de la ecuacin de Bessel para v = 0,
.
00
2
0
2
.
2
2 J
0
0
= 0 . (3.98)
Ntese que en esta expresin no aparece ya ningn trmino logartmico, lo que ocurre tambin en el caso
general. Sustituyendo el desarrollo en serie de potencias de
2
en esta ltima ecuacin multiplicada por
. se obtiene
1
kD0
_
k(k 1) k|c
k
.
k
kD0
c
k
.
kC2
2.
1
kD1
(1)
k
k
k
2
_
.
2
_
2k1
= 0 .
es decir
c
1
.
1
ID2
_
l
2
c
I
c
I2
).
I
4
1
kD1
(1)
k
k
4
k
k
2
.
2k
= 0 . (3.99)
De esta relacin se deduce en primer lugar que c
1
= 0. Como la ltima serie no contiene ms que
potencias pares, la relacin de recurrencia para las potencias impares
(2k 1)
2
c
2kC1
= c
2k1
. k = 1. 2. . . .
implica que todos los coecientes impares son nulos:
c
2kC1
= 0 . k = 0. 1. . . . . (3.100)
Deniendo b
k
= c
2k
e igualando a cero el coeciente de .
2k
en (3.99) se obtiene la relacin de recu-
rrencia para los coecientes pares:
k
2
b
k
=
1
4
b
k1
k
(4)
k
k
2
. k = 1. 2. . . . . (3.101)
Puntos singulares regulares 87
Multiplicando ambos miembros de esta relacin por (4)
k
(k 1)
2
y llamando
k
= (4)
k
k
2
b
k
se
obtiene
k
=
k1
1
k
. k = 1. 2. . . . .
La solucin de esta relacin de recurrencia es inmediata:
k
=
1
k
1
k 1
1
0
. k = 1. 2. . . . .
Al ser
0
= b
0
= c
0
= 0 se tiene nalmente
b
k
=
(1)
kC1
4
k
k
2
k
ID1
1
l
. k = 1. 2. . . . .
Hemos probado por tanto que una segunda solucin linealmente independiente de la ecuacin de Bessel
de orden 0 est dada por
N
0
(.) = J
0
(.) log .
1
kD1
(1)
k
k
2
_
k
ID1
1
l
_
_
.
2
_
2k
. (3.102)
La funcin N
0
se denomina funcin de Neumann de orden cero. Ntese que la funcin N
0
, a diferencia
de la otra solucin J
0
, no es analtica en el origen, donde se comporta como log .:
N
0
(.) -
x!0
log . .
En la prctica, en lugar de la funcin de Neumann N
0
se suele escoger como segunda solucin lineal-
mente independiente la combinacin lineal de J
0
y N
0
dada por
Y
0
(.) =
2
_
N
0
(.) (log 2 ;)J
0
(.)
_
.
donde
; = lim
k!1
_
k
ID1
1
l
log k
_
= 0.5772156649 . . .
es la llamada constante de EulerMascheroni
1
. La funcin Y
0
(que tambin diverge logartmicamente en
el origen) se suele denominar funcin de Bessel de segunda especie de orden cero. La solucin general
de la ecuacin de Bessel de orden 0 es por tanto
u(.) = C
1
J
0
(.) C
2
Y
0
(.) .
con C
1
y C
2
constantes reales.
Para v n = 1. 2. . . . , un clculo parecido al anterior pero algo ms complicado demuestra que una
segunda solucin de la ecuacin de Bessel de orden n linealmente independiente de J
n
est dada por la
funcin de Neumann de orden n
N
n
(.) = J
n
(.) log .
1
2
n1
kD0
(n k 1)
k
_
.
2
_
2kn
1
2
1
kD0
(1)
k
k(k n)
_
_
k
ID1
1
l
kCn
ID1
1
l
_
_
_
.
2
_
2kCn
(3.103)
1
Uno de los problemas abiertos ms importantes de la teora de nmeros es determinar si la constante de EulerMascheroni
es o no racional. De hecho, se sabe que si fuera ; = ,q con . q N primos entre s, entonces necesariamente q > 10
2420S0
.
88 SOLUCIONES EN FORMA DE SERIE
(donde se sobreentiende que la suma
k
ID1
1
I
no aparece si k = 0). De nuevo, es ms habitual usar como
segunda solucin de la ecuacin de Bessel de orden n la funcin de Bessel de segunda especie y orden
n denida por
Y
n
(.) =
2
_
N
n
(.) (log 2 ;)J
n
(.)
_
.
en trminos de la cual la solucin general de la ecuacin de Bessel de orden n = 0. 1. . . . est dada por
u(.) = C
1
J
n
(.) C
2
Y
n
(.) . C
1
. C
2
R.
Comentario. Si se dene
Y
(.) =
cos(v) J
(.) J
(.)
sen(v)
. v = 0. 1. . . . .
entonces J
e Y
forman un sistema fundamental de soluciones de la ecuacin de Bessel de orden v
tambin para v = 0. 1. . . . . Se demuestra que
Y
n
(.) = lim
!n
Y
(.) . n = 0. 1. . . . .
lo que explica la eleccin de las constantes en la denicin de Y
n
.
El comportamiento asntotico (para . o) de las funciones de Bessel de primera y segunda especie
est dado por la frmula
J
(.) -
x!1
_
2
.
cos
_
.
v
2
4
_
.
Y
(.) -
x!1
_
2
.
sen
_
.
v
2
4
_
.
En particular, las funciones de Bessel de primera y segunda especie tienen innitos ceros en el eje real
positivo, y presentan un comportamiento oscilatorio amortiguado para . o.
Las funciones de Bessel satisfacen ciertas relaciones de recurrencia, que se pueden deducir de las
dos identidades
(.
)
0
= .
J
1
(3.104)
(.
)
0
= .
J
C1
. (3.105)
Para probar la primera de estas identidades basta utilizar el desarrollo en serie (3.91) de J
, que propor-
ciona
(.
)
0
=
d
d.
1
kD0
(1)
k
2
k 1(k v 1)
_
.
2
_
2(kC)
=
1
kD0
(1)
k
2
(k v)
k 1(k v 1)
_
.
2
_
2kC21
= .
J
1
.
La identidad (3.105) se prueba de forma semejante. Las funciones de Bessel de segunda especie Y
satis-
facen tambin las identidades (3.104)(3.105), aunque aqu no demostraremos este resultado. Sumando
y restando las identidades (3.104)(3.105) multiplicadas por .
y .
, respectivamente, se obtienen las
siguientes relaciones entre funciones de Bessel de distintos ndices y sus derivadas:
J
1
J
C1
= 2J
0
(3.106)
J
1
J
C1
=
2v
.
J
. (3.107)
La segunda de estas identidades se puede utilizar para calcular de forma recursiva las funciones de
Bessel de ndice v k (k = 1. 2. . . . ) a partir de J
y J
1
. Por ejemplo, las funciones de Bessel
de ndice entero positivo se pueden expresar en trminos de J
0
y J
1
. Del mismo modo, la expresin
(3.96) para las funciones de Bessel de orden semientero se deduce fcilmente de la relacin (3.107) y las
ecuaciones (3.97). Ntese, por ltimo, que las funciones de Bessel de segunda especie tambin satisfacen
las relaciones (3.106)(3.107), ya que stas son consecuencia de (3.104)(3.105).
Captulo 4
Sistemas dinmicos en el plano
4.1 Resultados generales
En este captulo estudiaremos un tipo importante de sistemas de ecuaciones diferenciales ordinarias
de primer orden en que no aparece explcitamente la variable independiente, que en las aplicaciones
representa normalmente el tiempo. Denotaremos por ello dicha variable como t , mientras que . =
(.
1
. . . . . .
n
) ser utilizado frecuentemente para designar la variable independiente. Utilizaremos tambin
la notacin usual . para la derivada temporal
dx
dt
.
Denicin 4.1. Un sistema dinmico (o autnomo) en R
n
es un sistema de n ecuaciones diferenciales
de primer orden de la forma
. = (.) . (4.1)
donde la funcin vectorial : R
n
R
n
no depende del tiempo t .
v Un sistema arbitrario (es decir, no necesariamente autnomo)
d,
dt
= g(t. ,) (4.2)
puede convertirse fcilmente en un sistema dinmico. En efecto, si ,(t ) es una solucin de (4.2),
entonces .(s) (s. ,(s)) es solucin del sistema dinmico
d.
ds
= (.) . (.) =
_
1. g(.)
_
.
Recprocamente, las soluciones de este sistema con la condicin inicial t (0) = 0 son de la forma
(t. ,(t )), con ,(t ) solucin de (4.2).
Supondremos en lo que sigue que la funcin es de clase C
1
en un abierto U R
n
. Por tanto
, considerada como funcin de R U R
n
independiente de la variable t , es de clase C
1
. Por
el Corolario 1.14, dado cualquier dato inicial (t
0
. .
0
) R U localmente hay una nica solucin
.(t : t
0
. .
0
) del sistema dinmico que satisface la condicin inicial
.(t
0
: t
0
. .
0
) = .
0
.
Si t
0
= 0, escribiremos normalmente .(t : .
0
) en lugar de .(t : 0. .
0
).
Ejemplo 4.2. Uno de los ejemplos ms sencillos y a la vez importantes de sistema dinmico son las
ecuaciones de Newton
r = F(r. r) . r (.
1
. .
2
. .
3
) . (4.3)
que describen el movimiento de una partcula de masa unidad sometida a una fuerza externa F indepen-
diente del tiempo. Introduciendo las componentes de la velocidad
i
= .
i
y llamando
. =
_
.
1
. .
2
. .
3
.
1
.
2
.
3
_
R
6
.
89
90 SISTEMAS DINMICOS EN EL PLANO
las ecuaciones (4.3) se convierten en el sistema dinmico (4.1) con : R
6
R
6
dada por
(.) =
_
1
.
2
.
3
. J
1
(.). J
2
(.). J
3
(.)
_
.
Denicin 4.3. Una trayectoria del sistema dinmico (4.1) es la grca
_
t. .(t )
_
de cualquier solucin
.(t ), donde t pertenece a un intervalo 1.
Ntese por tanto que las trayectorias son curvas en R U R
nC1
, parametrizadas adems de una
forma especial (es decir, utilizando la primera coordenada como parmetro de la curva).
Denicin 4.4. Una rbita del sistema dinmico (4.1) es una curva ; U R
n
(considerada como
conjunto de puntos) que se puede parametrizar con una solucin .(t ) del sistema (4.1), es decir tal que
; = {.(t ) : t 1] . (4.4)
para alguna solucin .(t ) del sistema.
Por lo tanto, la proyeccin de una trayectoria (t. .(t )) R U sobre U R
n
es una rbita,
y recprocamente toda rbita se puede parametrizar de modo que sea la proyeccin sobre U de una
trayectoria (ver Fig. 4.1).
t
Figura 4.1: Trayectoria de un sistema dinmico en dos dimensiones (en rojo) y su correspondiente rbita
(en azul).
Denicin 4.5. Se llama espacio de fases del sistema dinmico n-dimensional (4.1) al abierto U R
n
en que est denida (y es de clase C
1
), mientras que el cilindro RU R
nC1
se denomina espacio
de fases ampliado. Llamaremos tambin mapa de fases del sistema dinmico (4.1) al conjunto de todas
sus rbitas.
Ejemplo 4.6. La ecuacin del oscilador armnico (con frecuencia o = 1)
u u = 0
puede escribirse como el sistema dinmico plano (es decir, con n = 2)
_
.
1
= .
2
.
2
= .
1
.
(4.5)
Resultados generales 91
siendo .
1
= u y .
2
= u. El sistema (4.5) es de hecho un sistema lineal homogneo con coecientes
constantes . = ., donde
=
_
0 1
1 0
_
.
Por lo visto en el Captulo 2, la solucin general del sistema es
.(t ) = e
t
.
0
=
_
cos t sen t
sen t cos t
__
_
=
_
cos t sen t
sen t cos t
_
.
con .
0
= (. ) R
2
. Las trayectorias del sistema son por tanto las hlices
t (t. cos t sen t. sen t cos t
_
R
3
. t R.
Ntese que las trayectorias son curvas en R
3
. Las rbitas del sistema son las proyecciones de las hlices
anteriores sobre las dos ltimas coordenadas, es decir las curvas planas parametrizadas por
t
_
cos t sen t. sen t cos t
_
.
Las ecuaciones paramtricas de las rbitas son por tanto
.
1
= cos t sen t . .
2
= sen t cos t .
Eliminando el parmetro t obtenemos la ecuacin implcita de las rbitas
.
2
1
.
2
2
=
2
2
.
que representa una familia de circunferencias de centro el origen y radio
_
a
2
2
.
La siguiente proposicin pone de maniesto la propiedad fundamental de los sistemas autnomos:
Proposicin 4.7. Si .(t ) es solucin del sistema dinmico (4.1) y c R, entonces .(t c) es tambin
solucin de dicho sistema.
Demostracin. Si ,(t ) = .(t c) entonces
,(t ) = .(t c) =
_
.(t c)
_
=
_
,(t )
_
.
Por el teorema de unicidad, al ser C
1
(U) dos trayectorias del sistema no se pueden cortar, ya
que en caso contrario las soluciones correspondientes a dichas trayectorias tendran ambas el mismo dato
inicial (el punto de corte). Este resultado es cierto tambin para sistemas no autnomos. Sin embargo,
los sistemas autnomos satisfacen una condicin ms fuerte:
Proposicin 4.8. Las rbitas del sistema dinmico (4.1) no se cortan.
Demostracin. Supongamos, en efecto, que dos rbitas distintas ;
1
y ;
2
se cortaran en el punto .
0
U.
Sean .
1
(t ) y .
2
(t ) las soluciones del sistema correspondientes a dichas rbitas. Por hiptesis, existen
dos tiempos t
1
y t
2
tales que
.
1
(t
1
) = .
2
(t
2
) = .
0
. (4.6)
Por el resultado anterior, las funciones ,
1
(t ) = .
1
(t t
1
) e ,
2
(t ) = .
2
(t t
2
) son ambas solucin del
sistema, y por (4.6) satisfacen la condicin inicial
,
1
(0) = ,
2
(0) = .
0
.
Por el teorema de unicidad, ,
1
(t ) = ,
2
(t ) en un entorno de t = 0, y por tanto las funciones .
1
y
.
2
parametrizan la misma curva en un entorno de .
0
(pues .
1
(t ) = .
2
(t t
2
t
1
) en un entorno de
t = t
1
).
92 SISTEMAS DINMICOS EN EL PLANO
De la demostracin anterior tambin se sigue que si ; es una rbita de (4.1) y .(t ) es una solucin del
sistema que parametriza ;, entonces las nicas soluciones del sistema que parametrizan dicha rbita son
de la forma .(t c) con c Rconstante. En otras palabras, la parametrizacin de cualquier rbita de un
sistema dinmico est determinada salvo por una traslacin temporal. (En lo anterior se sobreentiende
que nos referimos a parametrizaciones de las rbitas con soluciones del sistema.) En particular, el sentido
de recorrido (orientacin) de las rbitas est bien determinado, ya que .(t ) y .(t c) determinan la
misma orientacin.
De la Proposicin 4.8 se sigue tambin que las rbitas cerradas de un sistema autnomo (de clase
C
1
) han de ser necesariamente curvas cerradas simples (sin autointersecciones). En efecto, si una rbita
cerrada del sistema (4.1) se autointersecara en un punto .
0
entonces por dicho punto pasaran en realidad
dos rbitas distintas del sistema.
v Geomtricamente, el sistema dinmico (4.1) admite la siguiente interpretacin sencilla. La funcin
: U R
n
R
n
que dene el sistema es un campo de vectores en U R
n
, que a cada punto
. de U le asigna el vector (.) R
n
(pinsese, por ejemplo, en el caso n = 3). Si ; es una rbita
del sistema y .
0
es un punto cualquiera de ;, el vector (.
0
) es tangente a ; en .
0
, y su sentido
coincide con la orientacin de ; (vase la Fig. 4.2). En efecto, si .(t ) es una solucin de (4.1) que
parametriza a ; entonces .
0
= .(t
0
) para algn t
0
, y por tanto (al ser .(t ) solucin del sistema)
.(t
0
) =
_
.(t
0
)
_
= (.
0
) es tangente a la curva t .(t ), es decir a ;, en el punto .(t
0
) = .
0
.
Figura 4.2: Campo de vectores y rbitas (en rojo) del sistema lineal (4.5).
Proposicin 4.9. Una rbita del sistema (4.1) es cerrada si y slo si las soluciones del sistema que la
parametrizan son funciones peridicas.
Demostracin. En primer lugar, ntese que la condicin del enunciado tiene sentido, ya que acabamos
de ver que las soluciones que parametrizan una rbita dieren en una traslacin en el tiempo. Si .(t ) es
una solucin de (4.1) de perodo T > 0, la rbita
; = {.(t ) : t
0
6 t < t
0
T ]
parametrizada por dicha solucin es obviamente cerrada, ya que .(t
0
) = .(t
0
T ). Recprocamente,
supongamos que ; es una rbita cerrada del sistema, y sea .(t ) una solucin que parametrice ;. Si la
Resultados generales 93
rbita se reduce a un punto, entonces .(t ) es constante y por tanto peridica. En caso contrario, si .(a)
es un punto de ; entonces existe un mnimo valor de b > a tal que .(a) = .(b), por ser la curva ;
cerrada. Esto implica que .(t ) y .(t b a) son dos soluciones del sistema que verican la misma
condicin inicial en t = a. Por el teorema de unicidad, .(t ) = .(t b a) para todo t , y por tanto la
solucin .(t ) tiene perodo b a.
Por denicin, el perodo de una rbita cerrada del sistema (4.1) es el (menor) perodo de cualquier
solucin del sistema que parametrice dicha curva.
Ejemplo 4.10. Las curvas del sistema dinmico (4.5) se pueden escribir como sigue:
.(t ) = r
_
cos(t t
0
). sen(t t
0
)
_
siendo r =
_
2
y
= r cos t
0
. = r sen t
0
.
Otra parametrizacin de la misma rbita es .(t ) = r(cos t. sen t ). Las rbitas son, por tanto, circunfe-
rencias centradas en el origen y orientadas en sentido horario. En este caso, todas las rbitas del sistema
son cerradas y tienen el mismo perodo (2). En general, sin embargo, dos rbitas cerradas distintas de
un sistema dinmico tienen perodos distintos.
Es posible encontrar la ecuacin cartesiana (o implcita) de las rbitas de un sistema sin hallar antes
sus soluciones. Para ello parametrizamos la rbita ; utilizando como parmetro una de las coordenadas,
por ejemplo la primera. Por el teorema de la funcin inversa, esto podremos hacerlo localmente en un
entorno de cualquier punto en que .
1
= 0, es decir en que
1
(.) = 0. La rbita vendr por tanto descrita
localmente con una parametrizacin de la forma .
1
_
.
1
. .
2
(.
1
). . . . . .
n
(.
1
)
_
. Para determinar las
funciones .
i
(.
1
) (2 6 i 6 n), obsrvese que
d.
i
d.
1
=
.
i
.
1
=
i
(.
1
. .
2
. . . . . .
n
)
1
(.
1
. .
2
. . . . . .
n
)
. i = 2. 3. . . . . n.
La ecuacin diferencial de las rbitas en esta parametrizacin es por tanto el siguiente sistema, en general
no autnomo, de orden n 1:
d.
i
d.
1
=
i
(.
1
. .
2
. . . . . .
n
)
1
(.
1
. .
2
. . . . . .
n
)
. i = 2. 3. . . . . n. (4.7)
Obsrvese que esta parametrizacin slo tiene sentido en puntos en que
1
(.) = 0. Por ejemplo, en el
caso de un sistema plano, que normalmente escribiremos
_
. = (.. ,)
, = g(.. ,) .
(4.8)
las ecuaciones de las rbitas son
d,
d.
=
g(.. ,)
(.. ,)
. si (.. ,) = 0 . (4.9)
o bien
d.
d,
=
(.. ,)
g(.. ,)
. si g(.. ,) = 0 . (4.10)
Por ejemplo, para el sistema lineal
_
. = ,
, = .
94 SISTEMAS DINMICOS EN EL PLANO
estudiado anteriormente, la ecuacin de las rbitas tomando . como variable independiente es
d,
d.
=
.
,
. , = 0 .
que es de variables separadas y se integra fcilmente:
.
2
,
2
= c . c > 0 R.
Como ya vimos anteriormente, las rbitas son circunferencias centradas en el origen.
Los nicos puntos del espacio de fases en que no es posible parametrizar las rbitas tomando como
parmetro alguna de las coordenadas son los puntos en que todas las funciones
i
se anulan simult-
neamente. Estos puntos, de importancia fundamental para entender el comportamiento cualitativo del
sistema dinmico correspondiente, reciben el nombre de puntos crticos o equilibrios del sistema:
Denicin 4.11. Un punto .
0
U es un punto crtico del sistema dinmico (4.1) si (.
0
) = 0.
Si .
0
es un punto crtico del sistema (4.1), dicho sistema posee obviamente la solucin constante
.(t ) = .
0
, para todo t R. Esta es la razn por la cual a los puntos crticos de un sistema dinmico
se les llama tambin equilibrios. Visto de otra forma, un punto crtico es una rbita del sistema dinmi-
co (4.1) que se reduce a un punto. Por la Proposicin 4.8, ninguna rbita del sistema puede contener a
un punto crtico .
0
. Obsrvese, sin embargo, que una rbita .(t ) puede entrar en un equilibrio .
0
(si
lim
t!1
.(t ) = .
0
) o salir de l (si lim
t!1
.(t ) = .
0
).
En un sistema dinmico, los equilibrios son los puntos ms interesantes. En efecto, si .
0
R
n
no
es un equilibrio (es decir, si (.
0
) = 0) se puede probar que es posible realizar un cambio de variables
local , = Y(.) de forma que en la variable , el sistema dinmico (4.1) se escriba
,
1
= 1 . ,
2
= = ,
n
= 0 .
En las nuevas coordenadas ,
1
. . . . . ,
n
, las rbitas del sistema en las proximidades del punto ,
0
= Y(.
0
)
son simplemente rectas paralelas al eje ,
1
.
Denicin 4.12. Sea .
0
un punto crtico del sistema dinmico (4.1). Entonces:
i) .
0
es un punto crtico aislado si el sistema no tiene ningn punto crtico en un entorno perforado
0 < [. .
0
[ < c, con c > 0 sucientemente pequeo.
ii) .
0
es un punto crtico elemental (tambin llamado simple o no degenerado) si det D(.
0
) = 0.
iii) .
0
es un punto crtico hiperblico si todos los autovalores de D(.
0
) tienen parte real no nula.
Proposicin 4.13. .
0
punto crtico hiperblico == .
0
punto crtico elemental == .
0
punto crtico
aislado.
Demostracin. La primera implicacin es trivial, ya que si det D(.
0
) = 0 algn autovalor de D(.
0
)
es igual a cero, y por tanto .
0
no es un punto crtico hiperblico. En cuanto a la segunda, por el teorema
de la funcin inversa existe un entorno V = T
t
(.
0
) de .
0
en que es invertible. Por tanto, si . V y
(.) = 0 = (.
0
) entonces . = .
0
.
Ejemplo 4.14. Estudiemos cmo son los puntos crticos del sistema dinmico lineal
. = . (4.11)
en trminos de la matriz . En primer lugar, .
0
es un punto crtico de (4.11) si y slo si .
0
= 0. Hay
por tanto dos posibilidades:
i) det = 0. En este caso el nico punto crtico es .
0
= 0, que es por tanto aislado. De hecho es
elemental, ya que al ser (.) = . lineal se tiene D(.
0
) = para todo .
0
. Por ltimo, .
0
= 0
es un punto crtico hiperblico si y slo si todos los autovalores de tienen parte real no nula.
Sistemas lineales 95
ii) det = 0. Ahora las soluciones de .
0
= 0 forman un subespacio lineal (el ncleo de la matriz
) no nulo, y por tanto hay innitos puntos crticos no aislados.
La importancia de los sistemas dinmicos lineales estriba en que un sistema dinmico arbitrario se
puede aproximar por un sistema lineal apropiado en las proximidades de cualquier equilibrio .
0
. En
efecto, por denicin de derivada
(.) = (.
0
) D(.
0
) (. .
0
) c(.) = D(.
0
) (. .
0
) c(.) .
siendo [c(.)[ muy pequeo frente a [. .
0
[, es decir tal que
lim
x!x
0
[c(.)[
[. .
0
[
= 0 .
Es razonable por tanto pensar que el sistema dinmico (4.1) se pueda aproximar (en un sentido que
precisaremos a continuacin) en las proximidades del equilibrio .
0
por el sistema lineal
, = D(.
0
) , . (4.12)
siendo , = . .
0
la desviacin del equilibrio. Diremos que (4.12) es la aproximacin lineal de (4.1)
en el punto crtico .
0
. El mapa de fases de (4.1) en un entorno de .
0
y el de su aproximacin lineal (4.12)
en un entorno del origen deberan ser cualitativamente semejantes. En general, sin embargo, esto slo es
cierto si el punto crtico .
0
es hiperblico
1
. Por ejemplo, puede probarse que si .
0
es un punto crtico
hiperblico de (4.1) su estabilidad puede determinarse estudiando la estabilidad de la aproximacin lineal
en .
0
:
Teorema 4.15. Si .
0
es un punto crtico hiperblico del sistema dinmico (4.1), entonces la solucin
constante .
0
tiene el mismo tipo de estabilidad para (4.1) que la solucin trivial para su aproximacin
lineal en .
0
(4.12).
En otras palabras, .
0
es asintticamente estable si todos los autovalores de D(.
0
) tienen parte real
negativa, e inestable si algn autovalor de D(.
0
) tiene parte real positiva.
4.2 Sistemas lineales
En esta seccin nos centraremos en el estudio de sistemas dinmicos lineales en el plano, de la forma
_
.
,
_
=
_
.
,
_
. =
_
a b
c J
_
M
2
(R) . (4.13)
Sean
t tr = a J . det = aJ bc (4.14)
los invariantes de la matriz . Discutiremos nicamente el caso ms interesante en que la matriz es no
degenerada, es decir = 0 , y por tanto el origen es un punto crtico elemental del sistema lineal (4.13).
El polinomio caracterstico de es
(z) = z
2
t z . (4.15)
con discriminante t
2
4. Sea X = (.. ,), y efectuemos un cambio de variables dependientes real
X = 17 . con 1 M
2
(R) tal que det 1 = 0 .
1
Intuitivamente, esto se debe a que si el punto crtico es hiperblico una pequea perturbacin del sistema lo transformar
en un punto crtico hiperblico. La hiperbolicidad de un punto crtico es por tanto genrica.
96 SISTEMAS DINMICOS EN EL PLANO
Entonces
X = 1
7 = X ==
7 = 1
1
X =
_
1
1
1
_
7
y por tanto 7(t ) es solucin del sistema lineal
7 =
_
1
1
1
_
7 . (4.16)
Ntese que los mapas de fases de (4.13) y (4.16) son linealmente equivalentes, ya que se pasa de uno al
otro mediante el cambio de variable lineal X = 17. Se pueden dar los siguientes casos, dependiendo
de cmo sean los autovalores de la matriz :
(I) reales
(I.a) de distinto signo
(I.b) del mismo signo
(I.b.1) distintos
(I.b.2) iguales, con = z1
(I.b.3) iguales, con = z1
(II) complejos conjugados
_
(II.a) parte real no nula
(II.b) parte real nula
(I) Autovalores reales ==t
2
4 > 0
En este caso se puede escoger la matriz 1 de modo que sus columnas formen una base de Jordan de .
Entonces
1
1
1 = J =
_
z
1
0
c z
2
_
. (4.17)
siendo z
1
6 z
2
los dos autovalores de , con c = 0 si z
1
= z
2
o si es proporcional a la iden-
tidad, y c = 1 en caso contrario. Obsrvese que, por la invariancia de la traza y el determinante bajo
transformaciones de semejanza,
t = z
1
z
2
. = z
1
z
2
. (4.18)
(I.a) Autovalores de signos opuestos == < 0
Ntese que < 0 ==t
2
4 > 0. Si 7 = (z
1
. z
2
), la solucin general del sistema en 7 es
z
1
= c
1
e
2
1
t
. z
2
= c
2
e
2
2
t
. (4.19)
con z
1
< 0 < z
2
y c
1
. c
2
constantes arbitrarias. La ecuacin cartesiana de las rbitas se deduce fcil-
mente de la anterior:
z
2
= c [z
1
[
1
. c R. (4.20)
junto con z
1
= 0 (en realidad, se trata de las dos rbitas {z
1
= 0. z
2
> 0] y {z
1
= 0. z
2
< 0], junto con
el origen). Ntese que las dos soluciones
7(t ) = (1. 0)e
2
1
t
parametrizan el eje z
1
(menos el origen) y entran en el punto crtico (el origen), al ser z
1
negativo,
mientras que las soluciones
7(t ) = (0. 1)e
2
2
t
parametrizan el eje z
2
y salen del origen (al ser z
2
> 0). Si efectuamos la transformacin lineal
X = 17 para pasar a las variables originales X = (.. ,), el mapa de fases es semejante. En particular,
los ejes z
1
y z
2
se transforman en dos rectas dirigidas en la direccin de los dos autovectores linealmente
independientes de la matriz . En este caso se dice que el origen es un punto de silla del sistema (4.13)
(vase la Fig. 4.3).
Sistemas lineales 97
x
y
Figura 4.3: Mapa de fases de un sistema lineal con un punto de silla en el origen.
(I.b) Autovalores del mismo signo ==t
2
4 > 0. > 0
Ntese que las desigualdades > 0 y t
2
4 > 0 implican que t = 0. Por (4.18) los dos autovalores
tienen el mismo signo que t. Es conveniente distinguir los siguientes subcasos:
(I.b.1) Autovalores distintos ==t
2
4 > 0. > 0
La solucin del sistema y la ecuacin de las rbitas todava estn dados por (4.19) y (4.20), respectiva-
mente. Sin embargo, al ser los dos autovalores de igual signo, todas las soluciones tienden al origen para
t osi t < 0 (es decir, si z
1
< z
2
< 0), o para t osi t > 0 (0 < z
1
< z
2
). Ntese adems
que si t > 0 y c
1
= 0 entonces
lim
t!1
z
2
(t )
z
1
(t )
= lim
t!1
z
2
c
2
z
1
c
1
e
(2
2
2
1
)t
= 0 .
Por tanto si t > 0 todas las rbitas excepto la recta z
1
= 0 salen del origen con pendiente cero.
Anlogamente, si t < 0 y c
2
= 0 todas las rbitas excepto z
2
= 0 entran en el origen tangentes al eje
z
2
.
En las coordenadas originales X = (.. ,), todas las rbitas entran o salen del origen segn sea t < 0
t > 0. Dichas rbitas entran o salen del origen tangentes a la recta paralela al autovector correspon-
diente al menor autovalor en valor absoluto, excepto la recta paralela al otro autovector. Diremos que el
origen es un nodo estable si t < 0, y un nodo inestable si t > 0 (vase la Fig. 4.4).
(I.b.2) Autovalores iguales ( ==t
2
4 = 0 ) , = z1
Ntese que la condicin t
2
4 = 0 implica que > 0, ya que estamos suponiendo que = 0. Las
soluciones son las rectas X = e
2t
, con R
2
arbitrario y z = t,2. De nuevo, si t > 0 las rbitas
salen del origen, y entran en el origen si t < 0. Se dice en este caso que el origen es un nodo propio o
estelar (estable si t < 0, inestable si t > 0).
(I.b.3) Autovalores iguales ( ==t
2
4 = 0 ) , = z1
En este caso la forma cannica de Jordan de es
J =
_
z 0
1 z
_
. z =
t
2
.
Ntese que la matriz tiene un slo autovector linealmente independiente, que est dado por la segunda
columna de 1. La solucin del sistema (4.16) es ahora
z
1
= c
1
e
2t
. z
2
= (c
1
t c
2
)e
2t
(c
1
. c
2
R) .
98 SISTEMAS DINMICOS EN EL PLANO
x
y
Figura 4.4: Mapa de fases de un sistema lineal con un nodo inestable en el origen.
La ecuacin de las rbitas es
z
2
= z
1
_
1
z
log [z
1
[ c
_
. c R.
junto con z
1
= 0. (Ntese que z = 0, ya que = z
2
= 0.) De nuevo, todas las rbitas entran en el
origen (resp. salen del origen) si t < 0 (resp. t > 0). Adems, si c
1
= 0 entonces
z
2
(t )
z
1
(t )
=
zc
1
t (c
1
zc
2
)
zc
1
= t
_
c
2
c
1
1
z
_
t!1
o.
por lo que todas las rbitas entran o salen del origen tangentes al eje z
2
. En las coordenadas de partida
(.. ,), las rbitas entran o salen del origen (segn sea t < 0 t > 0) tangentes a la recta determinada
por el autovector de la matriz . Se dice en este caso que el origen es un nodo de una tangente, estable
si t < 0 e inestable si t > 0 (vase la Fig. 4.5).
x
y
Figura 4.5: Mapa de fases de un sistema lineal con un nodo inestable de una tangente en el origen.
(II) Autovalores complejos conjugados ==t
2
4 < 0
En este caso los autovalores son z
1,2
= i, con > 0. Existe por tanto un vector no nulo n =
u i C
2
tal que
n = ( i)n. (4.21)
Sistemas lineales 99
De hecho, u y son linealmente independientes, ya que si por ejemplo = cu, entonces n = (1 ic)u
implicara que u es un autovector real de la matriz real con autovalor i complejo, lo cual no es
posible. Tomando la parte real e imaginaria de (4.21) obtenemos las dos igualdades reales
u = u . = u .
Por tanto, si 1 =
_
u
_
, entonces 1 es invertible y
1
1
1 =
_
_
.
De la invariancia de la traza y el determinante bajo transformaciones lineales se sigue que
t = 2 . =
2
2
. (4.22)
Efectuando el cambio X = 17 obtenemos el sistema lineal en 7
z
1
= z
1
z
2
z
2
= z
1
z
2
.
(4.23)
Introduciendo las coordenadas polares
z
1
= r cos 0 . z
2
= r sen 0
se tiene
r
2
= z
2
1
z
2
2
== r r = z
1
z
1
z
2
z
2
= r
2
== r = r
z
1
= z
1
z
2
= r cos 0 (r sen 0)
0 = z
1
z
2
0 ==
0 = .
Por tanto en coordenadas polares el sistema (4.23) se escribe como
r = r .
0 = . (4.24)
cuya solucin general es
r = r
0
e
t
. 0 = 0
0
t . r
0
. 0
0
R. (4.25)
La ecuacin de las rbitas es por tanto
r = r
0
e
(00
0
)
. (4.26)
Hay dos posibilidades, segn ( t, por la ecuacin (4.22)) se anule o no:
(II.a) Autovalores complejos con parte real no nula ==t
2
4 < 0. t = 0
En este caso = 0, y por tanto las rbitas (4.26) son espirales logartmicas, y lo siguen siendo en las
coordenadas originales X = 17 (vase la Fig. 4.6). Se dice que el origen es un foco, estable para t < 0
e inestable para t > 0, ya que cuando t < 0 las espirales tienden al origen para t o, mientras que
si t > 0 esto ocurre para t o. El sentido de giro alrededor del origen de las rbitas se determina
fcilmente observando cul es la direccin del vector velocidad X cuando dichas rbitas cortan a uno
de los ejes. Por ejemplo, la componente . del vector velocidad para . = 0 es (0. ,) = b ,. Por tanto,
el sentido de giro es horario si b > 0 y antihorario si b < 0. Del mismo modo, como g(.. 0) = c . el
sentido de giro es horario si c < 0 y antihorario si c > 0. Ntese que
t
2
4 = (a J)
2
4(aJ bc) = (a J)
2
4bc < 0 == bc < 0 .
y por tanto b y c tienen signos opuestos en este caso.
100 SISTEMAS DINMICOS EN EL PLANO
(II.b) Autovalores imaginarios puros ==t = 0. > 0
Ahora = 0 y por tanto las rbitas (4.26) son una familia de circunferencias centradas en el origen,
que en las coordenadas originales (.. ,) se transforman en una familia de elipses centradas en el origen
(vase la Fig. 4.6). Se dice que el origen es un centro del sistema dinmico (4.13). El sentido de giro
alrededor del origen de las rbitas se determina como en el caso (II.a).
x
y
x
y
Figura 4.6: Mapa de fases de un sistema lineal con un foco inestable (izquierda) y un centro (derecha)
en el origen (las lneas en rojo son las rectas determinadas por los vectores u y ). Ntese que en ambos
casos b > 0 ( c < 0), ya que las rbitas se recorren en sentido horario.
En el plano de los parmetros (t. ), el conjunto t
2
4 = 0 representa una parbola. El tipo de
punto crtico que el sistema lineal (4.13) tiene en el origen (punto de silla, nodo, foco o centro) est
determinado por la posicin del punto (t. ) en el espacio de parmetros en relacin con esta parbola y
con los ejes coordenados (vase la Fig. 4.7).
Pto. de silla Pto. de silla
Foco est. Foco inest.
Nodo inest. Nodo est.
Nodo est. Nodo inest.
Centro
Figura 4.7: Tipos de puntos crticos del sistema lineal (4.13) en funcin de los invariantes t y de la
matriz .
Sistemas no lineales 101
4.3 Sistemas no lineales
Consideremos a continuacin el sistema dinmico en el plano
_
. = (.. ,)
, = g(.. ,) .
(4.27)
donde las funciones y g se supondrn al menos de clase C
1
en un abierto U R
2
, y sea (.
0
. ,
0
) U
un punto crtico de (4.27). La aproximacin lineal de dicho sistema en el punto crtico (.
0
. ,
0
) es el
sistema lineal
X = aX bY
Y = cX JY.
(4.28)
siendo (X. Y ) = (. .
0
. , ,
0
) y
_
a b
c J
_
= D(. g)(.
0
. ,
0
) =
_
x
(.
0
. ,
0
)
,
(.
0
. ,
0
)
g
x
(.
0
. ,
0
) g
,
(.
0
. ,
0
)
_
. (4.29)
El siguiente teorema relaciona el comportamiento del sistema no lineal (4.27) en las proximidades de
un punto crtico elemental (.
0
. ,
0
) con el de su aproximacin lineal (4.28) en un entorno del origen.
Dicho teorema arma esencialmente que si y g son sucientemente regulares en (.
0
. ,
0
), y dicho
punto crtico es hiperblico, entonces el sistema original (4.27) y su aproximacin lineal (4.28) tienen el
mismo tipo de punto crtico en (.
0
. ,
0
) y en el origen, respectivamente:
Teorema 4.16. Sea (.
0
. ,
0
) un punto crtico elemental del sistema (4.27), es decir
(.
0
. ,
0
) = g(.
0
. ,
0
) = 0 . det D(. g)(.
0
. ,
0
) =
x
(.
0
. ,
0
)
,
(.
0
. ,
0
)
g
x
(.
0
. ,
0
) g
,
(.
0
. ,
0
)
= 0 .
Entonces se verica:
i) Si (. g) C
1
y la aproximacin lineal (4.28) tiene un foco o un punto de silla en el origen,
entonces el sistema (4.27) tiene resp. un foco del mismo tipo (es decir, estable o inestable) o un
punto de silla en (.
0
. ,
0
).
ii) Si (. g) C
2
y la aproximacin lineal (4.28) tiene un nodo en el origen, entonces el sistema
(4.27) tiene un nodo del mismo tipo (estable o inestable, de una tangente) en (.
0
. ,
0
).
iii) Si y g son analticas en (.
0
. ,
0
) y la aproximacin lineal (4.28) tiene un centro en el origen,
entonces el sistema (4.27) puede tener un centro o un foco en (.
0
. ,
0
).
Nota. Si la aproximacin lineal tiene un nodo en el origen y (. g) slo es de clase C
1
, el sistema no
lineal (4.27) puede tener un foco en (.
0
. ,
0
). Por ejemplo, esto es lo que ocurre para el sistema
. = .
,
log r
, = ,
.
log r
en el origen. Anlogamente, si la aproximacin lineal tiene un centro en el origen y (. g) es de clase C
k
(con 1 6 k < o), el sistema no lineal (4.27) puede tener un centro-foco en (.
0
. ,
0
). Considrese, por
ejemplo, el sistema
_
. = , .r
kC1
sen(1,r)
, = . ,r
kC1
sen(1,r)
102 SISTEMAS DINMICOS EN EL PLANO
en el origen.
Segn el teorema anterior, si la aproximacin lineal (4.28) tiene un centro en el origen el sistema
original puede tener un centro o un foco en (.
0
. ,
0
) (an cuando las funciones y g sean analticas en
dicho punto). Para determinar en este caso qu tipo de punto crtico tiene el sistema (4.27) en (.
0
. ,
0
) se
pueden usar muchas veces consideraciones elementales de simetra. En efecto, si probamos que el mapa
de fases del sistema (4.27) en un entorno de (.
0
. ,
0
) es simtrico respecto de alguna recta que pase por
dicho punto entonces (.
0
. ,
0
) ha de ser forzosamente un centro, ya que una curva de tipo espiral no es
simtrica respecto de ninguna recta.
La simetra ms fcil de caracterizar es la simetra respecto de los ejes coordenados. Por ejemplo,
determinemos una condicin suciente para que las rbitas sean simtricas respecto del eje ., suponiendo
que (.
0
. ,
0
) = (.
0
. 0) y que el origen es un centro de la aproximacin lineal en este punto. En primer
lugar, para que el campo de vectores (. g) sea continuo en el eje . las rbitas deben cortar dicho eje con
tangente vertical, es decir
(.. 0) = 0 (4.30)
para [. .
0
[ sucientemente pequeo. En segundo lugar, la simetra respecto del eje horizontal implica
que si
_
.. ,(.)
_
es una rbita entonces (.. ,(.)) tambin lo es. Esto signica que si la funcin ,(.)
es solucin de
,
0
=
g(.. ,)
(.. ,)
tambin lo ser la funcin ,(.). Imponiendo esta condicin se obtiene
d
d.
_
,(.)
_
= ,
0
(.) =
g
_
.. ,(.)
_
_
.. ,(.)
_ =
g
_
.. ,(.)
_
_
.. ,(.)
_
para todo .. Esto se cumplir si
g(.. ,)
(.. ,)
=
g(.. ,)
(.. ,)
.
Por tanto, una condicin suciente para que las rbitas de (4.27) sean simtricas respecto del eje hori-
zontal es
g(.. ,)
(.. ,)
=
g(.. ,)
(.. ,)
. (.. 0) = 0 . (4.31)
En particular, ambas condiciones se cumplirn si
(.. ,) = (.. ,) . g(.. ,) = g(.. ,) . (4.32)
es decir si es impar en , y g es par en dicha variable. Anlogamente, las rbitas de (4.27) son
simtricas respecto del eje , si
g(.. ,)
(.. ,)
=
g(.. ,)
(.. ,)
. g(0. ,) = 0 (4.33)
o, en particular, si
(.. ,) = (.. ,) . g(.. ,) = g(.. ,) . (4.34)
Ejemplo 4.17. Consideremos el sistema
_
. = ,
, = . .
3
.
(4.35)
En este ejemplo, las funciones
(.. ,) = , . g(.. ,) = . .
3
Sistemas no lineales 103
son analticas en todo R
2
. Los puntos crticos del sistema son las soluciones de las ecuaciones
, = . .
3
= 0 .
es decir
(0. 0). (1. 0). (1. 0) . (4.36)
La matriz jacobiana de (. g) es
D(. g)(.. ,) =
_
0 1
1 3.
2
0
_
.
Como el determinante de esta matriz, que es igual a 3.
2
1, no se anula en ninguno de los puntos
crticos, todos ellos son elementales. En el origen, la aproximacin lineal de (4.35) es
_
X
Y
_
=
_
X
Y
_
. =
_
0 1
1 0
_
. (4.37)
Al ser det = 1 < 0, el origen es un punto de silla de la aproximacin lineal (4.37), y por tanto del
sistema original (4.35). Para estudiar el mapa de fases de dicho sistema en las proximidades del origen,
hacemos lo propio con el mapa de fases de la aproximacin lineal (4.37). Los autovalores de la matriz
son las soluciones de la ecuacin
z 1
1 z
= z
2
1 = 0 .
es decir z = 1. Los autovectores (X. Y ) correspondientes al autovalor z = 1 son las soluciones de
_
1 1
1 1
__
X
Y
_
=
_
0
0
_
.
Se trata, por tanto, de la recta Y = X. Anlogamente se prueba que los autovectores correspondientes
al autovalor z = 1 estn sobre la recta Y = X. El mapa de fases del sistema lineal (4.37) tiene
por tanto el aspecto de la Fig. 4.8. Volviendo al sistema original (4.35) en el origen, las dos rectas Y =
X se transforman en dos curvas llamadas separatrices, que salen o entran del origen con pendiente
respectivamente igual a 1 o 1 (vase la Fig. 4.10).
X
Y
Figura 4.8: Mapa de fases del sistema lineal (4.37).
En los dos puntos crticos (1. 0), la matriz de la aproximacin lineal es igual a
_
0 1
2 0
_
.
104 SISTEMAS DINMICOS EN EL PLANO
La ecuacin de autovalores de esta matriz es z
2
2 = 0, por lo que el origen es un centro de la
aproximacin lineal de (4.35) tanto en (1. 0) como en (1. 0). Al ser las funciones y g analticas,
el sistema (4.35) puede tener un centro o un foco en (1. 0). Pero en este caso el mapa de fases es
simtrico respecto del eje horizontal, ya que (.. ,) = , es impar en ,, y g(.. ,) = . .
3
es par
en dicha variable (al ser independiente de ,). Como ambos puntos crticos (1. 0) estn sobre el eje
horizontal, dichos puntos son centros del sistema (4.35).
Para dibujar el mapa de fases del sistema (4.35) es conveniente estudiar los signos de las componentes
del campo vectorial
_
(.. ,). g(.. ,)
_
= (,. . .
3
) en funcin del punto (.. ,). Por ejemplo, en este
caso la primera componente es positiva en el semiplano superior y negativa en el inferior, mientras que
la segunda es positiva si . (o. 1) L (0. 1) y negativa cuando . (1. 0) L (1. o). Por tanto la
direccin del campo de vectores es como se indica esquemticamente en la Fig. 4.9. En particular, dicho
campo es vertical sobre el eje . y horizontal sobre las rectas verticales . = 0. 1.
2 1 1 2
1
1
x
y
Figura 4.9: Direccin del campo de vectores del sistema (4.35).
El mapa de fases del sistema (4.35) tiene el aspecto de la gura 4.10. Ntese que las separatrices que
salen del origen con pendiente 1 vuelven al origen con pendiente 1, debido a que de otra forma
cortaran a otra rbita.
2 1 1 2
1.0
0.5
0.5
1.0
x
y
Figura 4.10: Mapa de fases del sistema (4.35).
En este ejemplo, podemos hacer armaciones ms precisas sobre las rbitas resolviendo su ecuacin
diferencial
d,
d.
=
. .
3
,
.
Sistemas no lineales 105
que es exacta (y de variables separadas) y se integra fcilmente:
1
2
,
2
1
4
.
4
1
2
.
2
= c
1
. c
1
R.
o, equivalentemente,
(.
2
1)
2
2,
2
= c . c > 0 . (4.38)
De esta ecuacin se deduce que el mapa de fases es simtrico respecto de ambos ejes, y todas las rbitas
son acotadas y cerradas. (La simetra respecto del eje , del mapa de fases se podra haber deducido sin
necesidad de hallar la ecuacin de las rbitas, ya que g es impar y par en ., resp. Anlogamente, como
es impar y g par en ,, las rbitas han de ser simtricas respecto al eje ..) Los puntos crticos (1. 0),
por ejemplo, se obtienen para c = 0. Las separatrices son las dos rbitas que pasan por el origen (ms
correctamente, tienden al origen para t o). Sustituyendo por tanto . = , = 0 en la ecuacin
anterior se obtiene c = 1, por lo que la ecuacin de las separatrices es
(.
2
1)
2
2,
2
= 1 == , = .
_
1
.
2
2
.
v Si el sistema (4.27) es exacto, es decir, si el abierto U R
2
es simplemente conexo y el campo
vectorial (. g) verica la condicin
x
g
,
= 0
en U, entonces los nicos tipos de puntos crticos que puede tener en U dicho sistema dinmico
son centros y puntos de silla.
106 SISTEMAS DINMICOS EN EL PLANO
ndice alfabtico
AbelLiouville, frmula de, 28, 43
aproximacin lineal, 95
autovalor, 30
autovector generalizado, 33
campo de vectores, 92
centro, 100102
conexo, 8
curvas integrales, 3, 4, 7, 10
desviacin del equilibrio, 95
ecuacin
asociada, 4
autnoma, 1921
de Airy, 61, 6667
de Bernoulli, 1314
de Bessel, 8188
de Euler, 7475
de Hermite, 6771
de Laplace, 71
de Legendre, 7173
de Newton, 89
de Riccati, 1415
de Schrdinger, 61
de variables separadas, 35
de Weber, 62, 67
diferencial, 1
de primer orden, 2
en derivadas parciales, 1
ordinaria, 1
en forma normal, 1
exacta, 711
homognea, 67
lineal, 1113
completa, 11, 41
con coecientes constantes, 4651
de orden n, 4151
homognea, 11, 41
inhomognea, 11, 41
equilibrio, vase punto crtico
espacio
de fases, 90
ampliado, 90
de soluciones, 2425, 4142
estabilidad, 5259, 95
de ecuaciones lineales, 5657
con coecientes constantes, 57
de sistemas lineales, 5254
con coecientes constantes, 5556
estados ligados, 62
EulerMascheroni, constante de, 87
factor integrante, 1011
foco, 99102
funcin
analtica, 62
de Bessel
de primera especie, 83
de segunda especie, 87, 88
de Neumann, 87
gamma de Euler, 8283
generatriz, 70, 73
homognea de grado cero, 6
ndice, 30
isoclina, 7, 10
Leibniz, regla generalizada de, 51
mapa de fases, 90
matriz
compaera, 41
de soluciones, 26
diagonalizable, 30
exponencial de una, 3739
fundamental, 25
cannica, 27
mtodo
de los coecientes indeterminados, 4951
de variacin de constantes, 12, 28, 4445
multiplicidad
algebraica, 30
geomtrica, 30
nodo, 97, 101
de una tangente, 98, 101
estelar, vase nodo propio
propio, 97
107
108 NDICE ALFABTICO
rbita, 90, 91
cerrada, 92
perodo de una, 93
ecuacin diferencial, 9394
orientacin, 92
simtrica respecto a un eje, 102
oscilador armnico, 90
cuntico, 62
energas de un, 70
polinomio
caracterstico, 30, 47
estable, 57
indicial, 76
interpolador de Lagrange, 3941
mnimo, 30
polinomios
de Hermite, 7071
de Legendre, 73
principio de superposicin lineal, 24, 42
punto
crtico, 94
aislado, 94
elemental, 94, 101
hiperblico, 94, 95, 101
de silla, 96, 101
ordinario, vase punto regular
regular, 63
soluciones en un entorno de un, 65
singular, 63
regular, 76
radio de convergencia, 63
reduccin del orden, 4344
Rodrigues, frmula de, 71, 73
RouthHurwitz, criterio de, 5759
Schwarz, lema de, 8
separatriz, 103
serie de Taylor, 63
simplemente conexo, 8
sistema
autnomo, vase sistema dinmico
de ecuaciones diferenciales, 16
dinmico, 89
lineal, 94100
no lineal, 101105
exacto, 105
fundamental, 25, 42, 48
lineal, 23
asintticamente estable, 53
con coecientes constantes, 2941
estable, 53
homogneo, 23
inestable, 53
inhomogneo, 23, 2829
solucin, 1
asintticamente estable, 52, 56
compleja, 29
estable, 52, 56
general, 2
de un sistema lineal, 29, 38
de una ecuacin lineal, 45
inestable, 52
normalizable, 62
subespacio propio generalizado, 34
teorema
de CayleyHamilton, 30
de existencia de Peano, 17
de existencia y unicidad, 17
para un sistema lineal, 23
para una ecuacin lineal, 41
de Frobenius, 77
de la funcin implcita, 3
trayectoria, 90
valores iniciales, problema de, 2, 16, 17
para un sistema lineal, 23, 29, 38
para una ecuacin lineal, 41
wronskiano, 26, 4243
Você também pode gostar
- Solidworks IntroduccionDocumento205 páginasSolidworks IntroduccionZarzamora Morada100% (1)
- Metodosde Fracciones ParcialesDocumento43 páginasMetodosde Fracciones ParcialesErik JuarezAinda não há avaliações
- Maquinas en El Paraiso 2001 EliaxDocumento173 páginasMaquinas en El Paraiso 2001 EliaxEduardo Saúl TapiaAinda não há avaliações
- Ecuacion Diferencial Exacta y No ExactaDocumento16 páginasEcuacion Diferencial Exacta y No ExactaErmelanda Garcia GarciaAinda não há avaliações
- 2.4 SolucionarioDocumento3 páginas2.4 SolucionarioZarzamora MoradaAinda não há avaliações
- Manual de Algebra LinealDocumento68 páginasManual de Algebra LinealZarzamora Morada0% (1)
- Curso de Programación Básico de Android PDFDocumento51 páginasCurso de Programación Básico de Android PDFAntonio FerladoAinda não há avaliações
- Cálculo de volúmenes de sólidos de revolución usando métodos del disco, arandela y casquillos cilíndricosDocumento14 páginasCálculo de volúmenes de sólidos de revolución usando métodos del disco, arandela y casquillos cilíndricosDiego Ignacio Benavente Gutiérrez0% (1)
- Preguntas Examen TopografiaDocumento9 páginasPreguntas Examen TopografiaJessica DavisAinda não há avaliações
- DETERMINACIÓN CBR SUELOSDocumento11 páginasDETERMINACIÓN CBR SUELOSFiorella PortalesAinda não há avaliações
- Modifi CA DoDocumento14 páginasModifi CA DoJoaquinMiguelHocesZarateAinda não há avaliações
- GDDV MG Tema 7Documento46 páginasGDDV MG Tema 7Cristina Lozano BautistaAinda não há avaliações
- Curvas Circulares Simples-ClassroomDocumento7 páginasCurvas Circulares Simples-ClassroomDubraskaAinda não há avaliações
- Escrito Final EpistemologíaDocumento13 páginasEscrito Final EpistemologíaDavid fonsecaAinda não há avaliações
- Curvas en El EspacioDocumento12 páginasCurvas en El EspacioAileen Portella PortugalAinda não há avaliações
- Programa Ipea C-Lculo IIDocumento4 páginasPrograma Ipea C-Lculo IICARLOS ANDRES LIMON HERNANDEZAinda não há avaliações
- Sesión 5 - Derivada Direccional y Vector GradienteDocumento7 páginasSesión 5 - Derivada Direccional y Vector GradienteMinero NfswAinda não há avaliações
- Universidad Distrital Francisco José de Caldas Facultad de Medio Ambiente Y Recursos Naturales Topografia ComputarizadaDocumento10 páginasUniversidad Distrital Francisco José de Caldas Facultad de Medio Ambiente Y Recursos Naturales Topografia ComputarizadaFelipe AriasAinda não há avaliações
- Calculo 2Documento1 páginaCalculo 2Sebastian-BAinda não há avaliações
- Ejercicios 2Documento3 páginasEjercicios 2Nahuel Hernández MartínAinda não há avaliações
- Linea de ConduccionDocumento22 páginasLinea de ConduccionjesusAinda não há avaliações
- Angulos de DeflexiónDocumento16 páginasAngulos de DeflexiónMiguel Angel Gonzales Velarde100% (1)
- Analisis de Datos ExperimentalesDocumento6 páginasAnalisis de Datos ExperimentalesGerardoSánchezAinda não há avaliações
- LINEAS CONVENCIONALES USADAS EN EL DIBUJO TÉCNICO ModificadoDocumento6 páginasLINEAS CONVENCIONALES USADAS EN EL DIBUJO TÉCNICO Modificadomariahamazonasog75% (4)
- Serie de Calculo IntegralDocumento47 páginasSerie de Calculo IntegralTraceur Carlos M. NAinda não há avaliações
- 05 - EpanetDocumento55 páginas05 - EpanetJuan Manuel PeriAinda não há avaliações
- 2o Parcial de cálculo diferencialDocumento6 páginas2o Parcial de cálculo diferencialMaría Machado AvilaAinda não há avaliações
- CURVA ESP.. (1) OkDocumento2 páginasCURVA ESP.. (1) OkJesus Jaimes ManceraAinda não há avaliações
- Trabajo de Diseño de CarreteraDocumento9 páginasTrabajo de Diseño de CarreteraGino Huallanca CoronadoAinda não há avaliações
- PROYECTO CALCULO II (Volumen de Solidos de Revolución)Documento18 páginasPROYECTO CALCULO II (Volumen de Solidos de Revolución)Romario F. H. Sabrera100% (1)
- Función Vectorial de Variable VectorialDocumento49 páginasFunción Vectorial de Variable VectorialEmerovsky ReyesAinda não há avaliações
- Vector TangenteDocumento3 páginasVector TangenteYaninaa Hernandez MachadoAinda não há avaliações
- Vectores FundamentalesDocumento79 páginasVectores FundamentalesRoy Mandujano67% (3)
- 4 ObrasLineales 2022 Parte1Documento10 páginas4 ObrasLineales 2022 Parte1ANGELICAAinda não há avaliações
- Replanteo de Curvas SimplesDocumento15 páginasReplanteo de Curvas Simpleswilfredo100% (1)
- Tema 3. Elementos Básicos de GeometríaDocumento31 páginasTema 3. Elementos Básicos de GeometríaCarlosAinda não há avaliações
- Curvas de NivelDocumento13 páginasCurvas de Nivelravb12Ainda não há avaliações
- 1er. Taller - 2020 (Gabarito) PDFDocumento4 páginas1er. Taller - 2020 (Gabarito) PDFÁlvaroAinda não há avaliações