Você também pode gostar
- A4935 DatasheetDocumento25 páginasA4935 DatasheetVinod KaruvatAinda não há avaliações
- WUBR 170GN P4 Approval Sheet 1.1Documento14 páginasWUBR 170GN P4 Approval Sheet 1.1Vinod KaruvatAinda não há avaliações
- CMake TutorialDocumento34 páginasCMake TutorialVinod Karuvat100% (1)
- DUI0040DDocumento578 páginasDUI0040DVinod KaruvatAinda não há avaliações
- Arria II GX HandbookDocumento574 páginasArria II GX HandbookVinod KaruvatAinda não há avaliações
- Compendium of DistributionsDocumento120 páginasCompendium of DistributionsSarah Nevels DawoodAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- 3.2. Image Compression (Part 1)Documento29 páginas3.2. Image Compression (Part 1)ReachAinda não há avaliações
- Photography PresentationDocumento92 páginasPhotography PresentationKim QuiambaoAinda não há avaliações
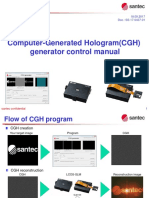
- Computer-Generated Hologram (CGH) (PDFDrive)Documento18 páginasComputer-Generated Hologram (CGH) (PDFDrive)Ahmed Riyaz JaffarAinda não há avaliações
- Adobe Photoshop Cs3 TutorialDocumento37 páginasAdobe Photoshop Cs3 TutorialMOhammad ZOhaib100% (3)
- TITLE: HT260WXC-200 Product Specification Rev. O: Hefei Boe Optoelectronics TechnologyDocumento27 páginasTITLE: HT260WXC-200 Product Specification Rev. O: Hefei Boe Optoelectronics TechnologyMirko VojnovićAinda não há avaliações
- Zenith 12 XPDocumento14 páginasZenith 12 XPGIlmanPunkAinda não há avaliações
- Preview EG WildlifeDocumento21 páginasPreview EG WildlifeSlavkoRosulAinda não há avaliações
- Diagnostic Radiography Training Centres 2022Documento5 páginasDiagnostic Radiography Training Centres 2022Brian RamphisaAinda não há avaliações
- The History of TelevisionDocumento2 páginasThe History of TelevisionDurai Mani100% (1)
- PTM Recipe and Guide Book Grace PSDocumento57 páginasPTM Recipe and Guide Book Grace PSHilcias SalazarAinda não há avaliações
- Logiq v5 - SpecificationDocumento3 páginasLogiq v5 - SpecificationserubimAinda não há avaliações
- Advanced PhotojournalismDocumento4 páginasAdvanced PhotojournalismAli HassanAinda não há avaliações
- Photography HandoutDocumento4 páginasPhotography HandoutAmandaAinda não há avaliações
- Principles of Visual Design and PhotograDocumento16 páginasPrinciples of Visual Design and PhotograKitchenHacksAinda não há avaliações
- Zoncare-P7: Abundant Clinical ApplicationsDocumento2 páginasZoncare-P7: Abundant Clinical ApplicationsSyket Hossain100% (1)
- Types of Camera AnglesDocumento2 páginasTypes of Camera AnglesMaJudith JavilloAinda não há avaliações
- Amateur Photographer - May 18, 2019 UK PDFDocumento84 páginasAmateur Photographer - May 18, 2019 UK PDFVilmet KaraneziAinda não há avaliações
- Computer Vision Presentation AIDocumento16 páginasComputer Vision Presentation AIAsh The MidBenchersAinda não há avaliações
- Flir HRC Ms DatasheetDocumento1 páginaFlir HRC Ms DatasheetallbatrossAinda não há avaliações
- Digital Image ProcessingDocumento6 páginasDigital Image ProcessingImran HaiderAinda não há avaliações
- CHDK For Dummies - CHDK WikiDocumento15 páginasCHDK For Dummies - CHDK WikiRetno DanuAinda não há avaliações
- Pure Entertainment: Led TVDocumento3 páginasPure Entertainment: Led TVneophantom00Ainda não há avaliações
- Metz 2009Documento48 páginasMetz 2009dikdikjatnika100% (1)
- BENQ/Norcent DC1020 Digital Camera ManualDocumento32 páginasBENQ/Norcent DC1020 Digital Camera ManualcantiusAinda não há avaliações
- 40 Practical Photography Assignments To Inspire You - DIY PhotographyDocumento30 páginas40 Practical Photography Assignments To Inspire You - DIY Photographyjeffreygovender5745Ainda não há avaliações
- MAKSIPRINT Dilerksi Cenovnik 29.05.2010Documento53 páginasMAKSIPRINT Dilerksi Cenovnik 29.05.2010Живко ВасилевAinda não há avaliações
- Amateur Photographer 201407012Documento84 páginasAmateur Photographer 201407012James Nguyen100% (1)
- Uniview Product Catalog 2016 Version 1 - 789086 - 168459 - 0Documento110 páginasUniview Product Catalog 2016 Version 1 - 789086 - 168459 - 0oussama800Ainda não há avaliações
- Color Theory Notes Organizer - 1Documento2 páginasColor Theory Notes Organizer - 1Hania MohamedAinda não há avaliações
- 3D Inspection + SMTDocumento4 páginas3D Inspection + SMTGuilherme Dos Santos MoreiraAinda não há avaliações