Você também pode gostar
- Moc3051 PDFDocumento9 páginasMoc3051 PDFlookb64Ainda não há avaliações
- Moc 3052Documento11 páginasMoc 3052Haidu Ionut SebastianAinda não há avaliações
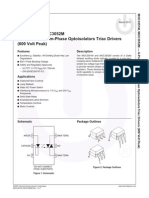
- MOC3051M, MOC3052M 6-Pin DIP Random-Phase Optoisolators Triac Drivers (600 Volt Peak)Documento15 páginasMOC3051M, MOC3052M 6-Pin DIP Random-Phase Optoisolators Triac Drivers (600 Volt Peak)slikmonkeeAinda não há avaliações
- Motorola An 780ADocumento6 páginasMotorola An 780ArobinsonsAinda não há avaliações
- Moc 3082Documento7 páginasMoc 3082L30N1Ainda não há avaliações
- MOC3061photo TriacDocumento22 páginasMOC3061photo TriacAnonymous uCjJftAinda não há avaliações
- Moc3061 MDocumento8 páginasMoc3061 MFatih ArabacıAinda não há avaliações
- Moc3011 PDFDocumento7 páginasMoc3011 PDFAlvaro Mompi RuizAinda não há avaliações
- Datasheet MOC301Documento6 páginasDatasheet MOC301Vam PireAinda não há avaliações
- Moc3023 PDFDocumento7 páginasMoc3023 PDFEricko JustopoAinda não há avaliações
- (600 Volts Peak) : GlobaloptoisolatorDocumento8 páginas(600 Volts Peak) : GlobaloptoisolatorFathi MusaAinda não há avaliações
- 161 12891 0 Moc3061Documento7 páginas161 12891 0 Moc3061zocanAinda não há avaliações
- Applications of Non Zero Crossing Triac Drivers MOC3011Documento6 páginasApplications of Non Zero Crossing Triac Drivers MOC3011David ReyesAinda não há avaliações
- 6-Pin Dip Random-Phase Optoisolators Triac Driver Output (250/400 VOLT PEAK)Documento10 páginas6-Pin Dip Random-Phase Optoisolators Triac Driver Output (250/400 VOLT PEAK)ge_bdAinda não há avaliações
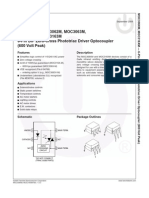
- MOC3061M, MOC3062M, MOC3063M, MOC3162M, MOC3163M 6-Pin DIP Zero-Cross Phototriac Driver Optocoupler (600 Volt Peak)Documento11 páginasMOC3061M, MOC3062M, MOC3063M, MOC3162M, MOC3163M 6-Pin DIP Zero-Cross Phototriac Driver Optocoupler (600 Volt Peak)tyutyuAinda não há avaliações
- Moc3020 MDocumento10 páginasMoc3020 MTrong VuAinda não há avaliações
- Moc 3022Documento11 páginasMoc 3022Pablo Arroyo MondragónAinda não há avaliações
- At 30 IcDocumento9 páginasAt 30 IcCristina AntohiAinda não há avaliações
- MOC30X0MDocumento11 páginasMOC30X0MmersoigAinda não há avaliações
- M XxuywDocumento13 páginasM XxuywRenganathan KrishnanAinda não há avaliações
- Triac 2n6073aDocumento7 páginasTriac 2n6073aJorge MoralesAinda não há avaliações
- Thyristor Control Heater Panel GuideDocumento63 páginasThyristor Control Heater Panel Guidevaithy1990Ainda não há avaliações
- Transformer Driver For Isolated Power Supplies: Features ApplicationsDocumento29 páginasTransformer Driver For Isolated Power Supplies: Features Applicationsngongpro27Ainda não há avaliações
- Moc 3021Documento7 páginasMoc 3021Juanpere2Ainda não há avaliações
- SG 3524Documento10 páginasSG 3524Akhlaque ShamsiAinda não há avaliações
- AppNote03 Uc3842Documento14 páginasAppNote03 Uc3842Heriberto Flores AmpieAinda não há avaliações
- Aplicacion Uc3842Documento15 páginasAplicacion Uc3842Gian Mejia100% (1)
- Slua 143Documento15 páginasSlua 143Tonia KataAinda não há avaliações
- Speed Control for Industrial VehiclesDocumento37 páginasSpeed Control for Industrial VehiclesVladimir KrivenokAinda não há avaliações
- UC3845ANDocumento15 páginasUC3845ANMiloud ChouguiAinda não há avaliações
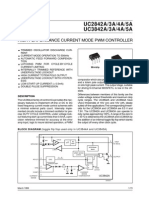
- UC2842A/3A/4A/5A UC3842A/3A/4A/5A: High Performance Current Mode PWM ControllerDocumento16 páginasUC2842A/3A/4A/5A UC3842A/3A/4A/5A: High Performance Current Mode PWM ControllerCortés BernaAinda não há avaliações
- Bender Rcm470lyDocumento3 páginasBender Rcm470lyRobert Arias TabrajAinda não há avaliações
- MR1520Documento8 páginasMR1520clanonAinda não há avaliações
- ACS102-5Tx: Ac Line Switch Asd™ AC Switch FamilyDocumento8 páginasACS102-5Tx: Ac Line Switch Asd™ AC Switch FamilyeduardopercicaroliAinda não há avaliações
- Op To CouplerDocumento10 páginasOp To CouplerDiogoVasconcelosAinda não há avaliações
- Uc3842b 3843BDocumento10 páginasUc3842b 3843Bbob75Ainda não há avaliações
- Forward Design 300W STmicroelectronics App NoteDocumento10 páginasForward Design 300W STmicroelectronics App Notecristi7521Ainda não há avaliações
- Moc 3021Documento8 páginasMoc 3021Adrian Jose Costa OspinoAinda não há avaliações
- Variatore Di TensioneDocumento12 páginasVariatore Di Tensioneconti51Ainda não há avaliações
- LM350 DatasheetDocumento12 páginasLM350 DatasheetOmarVelasquezC.Ainda não há avaliações
- Datasheet lm337Documento8 páginasDatasheet lm337eduardo1011Ainda não há avaliações
- Output Filters Design GuideDocumento41 páginasOutput Filters Design GuideMohamedAinda não há avaliações
- Datasheet MUR480EDocumento8 páginasDatasheet MUR480EMartín SayagoAinda não há avaliações
- Introduction to Power System ProtectionNo EverandIntroduction to Power System ProtectionAinda não há avaliações
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Ainda não há avaliações
- Introduction to Power System ProtectionNo EverandIntroduction to Power System ProtectionNota: 5 de 5 estrelas5/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Nota: 2.5 de 5 estrelas2.5/5 (3)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlNo EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlNota: 5 de 5 estrelas5/5 (1)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesAinda não há avaliações
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetAinda não há avaliações
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNota: 2 de 5 estrelas2/5 (1)
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetAinda não há avaliações
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsNo EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsNota: 3.5 de 5 estrelas3.5/5 (6)
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1No EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Nota: 4.5 de 5 estrelas4.5/5 (3)
- 2015-05-18-IEEE Atlanta GE PC MV Motor Designs and StandardsDocumento47 páginas2015-05-18-IEEE Atlanta GE PC MV Motor Designs and StandardsFrancisco MartinezAinda não há avaliações
- Electronics Fundamentals Ilt Circuit Faults: Global Manpower DevelopmentDocumento8 páginasElectronics Fundamentals Ilt Circuit Faults: Global Manpower DevelopmentMohammed KhalidAinda não há avaliações
- Static Characteristics of SCR Experiment 1 Aim: To Study The Static Characteristics of SCR Apparatus: Multism Theory: SCR Works in Three ModesDocumento9 páginasStatic Characteristics of SCR Experiment 1 Aim: To Study The Static Characteristics of SCR Apparatus: Multism Theory: SCR Works in Three ModesHoward TimbangAinda não há avaliações
- 20004921997.electricity Bill PDFDocumento1 página20004921997.electricity Bill PDFRakibul HassanAinda não há avaliações
- Saco 16 D 3Documento6 páginasSaco 16 D 3PepeVichecheAinda não há avaliações
- Comparison of Finite-Element and IEC Methods For Cable Thermal Analysis Under Various Operating Environments (Kady2014)Documento6 páginasComparison of Finite-Element and IEC Methods For Cable Thermal Analysis Under Various Operating Environments (Kady2014)daegerteAinda não há avaliações
- Price List Effective From 1/09/08Documento28 páginasPrice List Effective From 1/09/08bhupi dagarAinda não há avaliações
- Linde Linc1 PDF-1Documento2 páginasLinde Linc1 PDF-1Douglas MirandaAinda não há avaliações
- Bilal CV Coop 1Documento2 páginasBilal CV Coop 1Haroon AbidAinda não há avaliações
- Microwave Semiconductor Devices and Circuits NotesDocumento31 páginasMicrowave Semiconductor Devices and Circuits NotesAnkur SagtaniAinda não há avaliações
- Push Pull Transformer DesigneDocumento4 páginasPush Pull Transformer DesigneKrishna InamdarAinda não há avaliações
- Electrotechnics N4 April 2023 Memorandum PDFDocumento7 páginasElectrotechnics N4 April 2023 Memorandum PDFPetro Susan BarnardAinda não há avaliações
- VOL 6 Microwave MagnetronsDocumento824 páginasVOL 6 Microwave Magnetronsgorods5rt100% (1)
- Closed Loop Control of Buck ConverterDocumento10 páginasClosed Loop Control of Buck ConverterlaxmandasriAinda não há avaliações
- Niviss Pool StandardDocumento3 páginasNiviss Pool StandardMiguel FerroAinda não há avaliações
- New Winding Design MethodDocumento7 páginasNew Winding Design MethodEzequiel Yazdani CavazosAinda não há avaliações
- La 42031Documento7 páginasLa 42031Deyby GarciaAinda não há avaliações
- Quick Start Guide to Millennia NSEQ-2 PluginDocumento5 páginasQuick Start Guide to Millennia NSEQ-2 PluginClément GillauxAinda não há avaliações
- DHC 6 XGDocumento18 páginasDHC 6 XGRishan RanatungaAinda não há avaliações
- ECE207 Exam - Analog Circuits ReviewDocumento4 páginasECE207 Exam - Analog Circuits ReviewVinay MadhavAinda não há avaliações
- Electrical Machine Ii: Chapter 5: Synchronous MachinesDocumento58 páginasElectrical Machine Ii: Chapter 5: Synchronous MachinesHaile HrAinda não há avaliações
- MQ Power DCA-70SSJUDocumento102 páginasMQ Power DCA-70SSJULuis Eduardo Corzo Enriquez100% (1)
- MIL STD 2194 InfraredDocumento26 páginasMIL STD 2194 Infraredshahbaz akramAinda não há avaliações
- JBLpro STX800 Brochure Web 062112Documento8 páginasJBLpro STX800 Brochure Web 062112Diego MartínezAinda não há avaliações
- Valleylab Force 2Documento2 páginasValleylab Force 2eslam MansourAinda não há avaliações
- IB PHYSICS HL MULTIPLE CHOICE REVIEW: ELECTRIC CIRCUITSDocumento7 páginasIB PHYSICS HL MULTIPLE CHOICE REVIEW: ELECTRIC CIRCUITSyawahabAinda não há avaliações
- GH IA Induction Heating GuideDocumento12 páginasGH IA Induction Heating GuidetsrforfunAinda não há avaliações
- 2133 Separate Horn Speakers & Driver Units Brochure Brochure PDFDocumento8 páginas2133 Separate Horn Speakers & Driver Units Brochure Brochure PDFIlayaraja BoopathyAinda não há avaliações
- Marshall MS2 4Documento5 páginasMarshall MS2 4Mika Foric100% (1)
- ANT AMB4520R0 1433 DatasheetDocumento2 páginasANT AMB4520R0 1433 DatasheetWarji Muslam100% (5)