Você também pode gostar
- 6th Central Pay Commission Salary CalculatorDocumento15 páginas6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Online Data Sheet TIM551-2050001 en 20140523 0435Documento5 páginasOnline Data Sheet TIM551-2050001 en 20140523 0435sacuarsAinda não há avaliações
- Describe YourselfDocumento1 páginaDescribe YourselfsacuarsAinda não há avaliações
- Samsung 2009 PDP Plasma Training Manual (ET)Documento74 páginasSamsung 2009 PDP Plasma Training Manual (ET)Tahir AliAinda não há avaliações
- Online Data Sheet TIM551-2050001 en 20140523 0435Documento5 páginasOnline Data Sheet TIM551-2050001 en 20140523 0435sacuarsAinda não há avaliações
- Full Page PhotoDocumento1 páginaFull Page PhotosacuarsAinda não há avaliações
- Open CVDocumento1 páginaOpen CVsacuarsAinda não há avaliações
- Star BurnDocumento1 páginaStar BurnJ SELVA ANTONY SANTOSHAinda não há avaliações
- Learn German EffortlesslyDocumento196 páginasLearn German EffortlesslyElaAinda não há avaliações
- Adafruit Motor Shield v2 For ArduinoDocumento46 páginasAdafruit Motor Shield v2 For ArduinosacuarsAinda não há avaliações
- SathyaDocumento1 páginaSathyasathya84vaidyaAinda não há avaliações
- Toughest GRE Words by SacuarDocumento4 páginasToughest GRE Words by SacuarsacuarsAinda não há avaliações
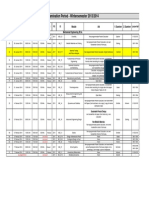
- Examination Period - Wintersemester 2013/2014Documento6 páginasExamination Period - Wintersemester 2013/2014sacuarsAinda não há avaliações
- Design and production of shoesDocumento7 páginasDesign and production of shoessacuarsAinda não há avaliações
- UDP Remote Control Commands: DrivingDocumento1 páginaUDP Remote Control Commands: DrivingsacuarsAinda não há avaliações
- CVDocumento2 páginasCVsacuarsAinda não há avaliações
- Eye Controlled Robot CodeDocumento6 páginasEye Controlled Robot CodesacuarsAinda não há avaliações
- My Childhood DreamsDocumento1 páginaMy Childhood DreamssacuarsAinda não há avaliações
- Subjects Unit Fees January 2010Documento1 páginaSubjects Unit Fees January 2010sacuarsAinda não há avaliações
- Electric Power Distribution - Wikipedia, The Free EncyclopediaDocumento3 páginasElectric Power Distribution - Wikipedia, The Free EncyclopediasacuarsAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Chapters 1 and 3: ARM Processor ArchitectureDocumento44 páginasChapters 1 and 3: ARM Processor ArchitectureTwinkle RatnaAinda não há avaliações
- Economic DispatchDocumento37 páginasEconomic DispatchHasan KurniawanAinda não há avaliações
- Netsh Wlan Start HostednetworkDocumento3 páginasNetsh Wlan Start HostednetworkM Nanda KumarAinda não há avaliações
- Narrative Report 2BDocumento14 páginasNarrative Report 2BMarc Edson CastroAinda não há avaliações
- Industry 4.0 CourseDocumento49 páginasIndustry 4.0 CourseThiruvengadam CAinda não há avaliações
- Building An Online Shopping Cart Using C Sharp Part 2Documento17 páginasBuilding An Online Shopping Cart Using C Sharp Part 2TrungChanhNguyenAinda não há avaliações
- Race Tuning 05-07 KX250Documento6 páginasRace Tuning 05-07 KX250KidKawieAinda não há avaliações
- BW17V1D24Documento5 páginasBW17V1D24Lye YpAinda não há avaliações
- Ashrae Cooling and Heating Load Calculation ManualDocumento2 páginasAshrae Cooling and Heating Load Calculation ManualTorus Engenharia0% (1)
- Aksa Lte NW AssessmentDocumento43 páginasAksa Lte NW AssessmentSenthilkumar Purushothaman100% (2)
- Covey Stephen RDocumento90 páginasCovey Stephen RcemgallAinda não há avaliações
- Dyefix-CF - Dye Fixing Agent With Excellent Fastness To Chlorine.Documento10 páginasDyefix-CF - Dye Fixing Agent With Excellent Fastness To Chlorine.L.N.CHEMICAL INDUSTRYAinda não há avaliações
- Modern Control Technology Components & Systems (2nd Ed.)Documento2 páginasModern Control Technology Components & Systems (2nd Ed.)musarraf172Ainda não há avaliações
- 1 - Censorship Lesson Plan F451Documento4 páginas1 - Censorship Lesson Plan F451Julia MaturoAinda não há avaliações
- Help - Walkthrough - Creating Beam and Plate Features - AutodeskDocumento5 páginasHelp - Walkthrough - Creating Beam and Plate Features - AutodeskTien HaAinda não há avaliações
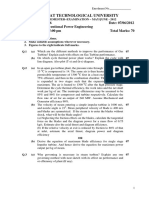
- GTU BE- Vth SEMESTER Power Engineering ExamDocumento2 páginasGTU BE- Vth SEMESTER Power Engineering ExamBHARAT parmarAinda não há avaliações
- Sample Calculatio For Design of Structures and Foundations For Vibrating MachinesDocumento6 páginasSample Calculatio For Design of Structures and Foundations For Vibrating MachinesRay LeeAinda não há avaliações
- List of Portmanteau Words: GeneralDocumento7 páginasList of Portmanteau Words: GeneraltarzanAinda não há avaliações
- Module 7: Resolving Network Connectivity IssuesDocumento54 páginasModule 7: Resolving Network Connectivity IssuesJosé MarquesAinda não há avaliações
- Twingo 3 & Clio 4Documento10 páginasTwingo 3 & Clio 4Alexandre Le GrandAinda não há avaliações
- Paytm Details - HistoryDocumento12 páginasPaytm Details - HistorySachin PoddarAinda não há avaliações
- Bip 0072-2014 PDFDocumento94 páginasBip 0072-2014 PDFgrAinda não há avaliações
- Database ScriptsDocumento111 páginasDatabase ScriptsVikas GaurAinda não há avaliações
- Star Burst EffectDocumento22 páginasStar Burst EffectDexter AlcantaraAinda não há avaliações
- Math G7 - Probability and StatisticsDocumento29 páginasMath G7 - Probability and StatisticsLeigh YahAinda não há avaliações
- Fixed Platforms, Walkways, Stairways and Ladders-Design, Construction and InstallationDocumento7 páginasFixed Platforms, Walkways, Stairways and Ladders-Design, Construction and InstallationgeofounAinda não há avaliações
- Bose v. McDonaldsDocumento26 páginasBose v. McDonaldsjoemullinAinda não há avaliações
- M433 Center of Mass Location Throughout Fuze Arming CycleDocumento17 páginasM433 Center of Mass Location Throughout Fuze Arming CycleNORDBAinda não há avaliações
- Learn The Powerful Memory Techniques Used by TheDocumento2 páginasLearn The Powerful Memory Techniques Used by TheAchieverAinda não há avaliações
- Thief 2 The Metal Age ManualDocumento33 páginasThief 2 The Metal Age ManualMordenGreyAinda não há avaliações