Você também pode gostar
- Apostila Automação IndustrialDocumento73 páginasApostila Automação IndustrialCristiano99% (193)
- Instalação Pto Acelerador Remoto D08 Isf IslDocumento36 páginasInstalação Pto Acelerador Remoto D08 Isf Islmanoel bernardo neto100% (4)
- Analise SWOT - Tomando Decisoes EstrategicasDocumento2 páginasAnalise SWOT - Tomando Decisoes EstrategicasAna LeiteAinda não há avaliações
- 0 - Ações Devidas Ao Vento em Edificações - João Alfredo Azzi PittaDocumento47 páginas0 - Ações Devidas Ao Vento em Edificações - João Alfredo Azzi PittaWilliam PolAinda não há avaliações
- Apostila InventorDocumento32 páginasApostila InventorJulierme CardosoAinda não há avaliações
- História e aplicações dos lubrificantes na agroindústriaDocumento28 páginasHistória e aplicações dos lubrificantes na agroindústriaHansMikuAinda não há avaliações
- Apostila CNCDocumento141 páginasApostila CNCAnderson Pereira100% (2)
- Apostila CNCDocumento141 páginasApostila CNCAnderson Pereira100% (2)
- 1 - Transistor Bipolar PDFDocumento53 páginas1 - Transistor Bipolar PDFAntonio PortelaAinda não há avaliações
- Apostila - Sistemas Supervisórios e SDCD - Senai-MGDocumento103 páginasApostila - Sistemas Supervisórios e SDCD - Senai-MGcmgobboAinda não há avaliações
- Dicas Solid PDFDocumento308 páginasDicas Solid PDFAndressa WasserbergAinda não há avaliações
- Controle biológico: fundamentos ecológicosDocumento175 páginasControle biológico: fundamentos ecológicosAdrian Prieto Ruiz100% (1)
- 02 Sistemas - SupervisoriosDocumento52 páginas02 Sistemas - Supervisoriosandersonalves_cruz100% (1)
- Metodologia A3 como instrumento de melhoria contínuaDocumento15 páginasMetodologia A3 como instrumento de melhoria contínuaAnderson Morgado100% (1)
- CLP para IniciantesDocumento25 páginasCLP para Iniciantesandersonalves_cruzAinda não há avaliações
- Resp ExercDocumento13 páginasResp Exercandersonalves_cruzAinda não há avaliações
- 3995 Apostila de Solidworks (Autocad)Documento47 páginas3995 Apostila de Solidworks (Autocad)ThIaGoM100% (17)
- Manutenção conceitos e objetivosDocumento78 páginasManutenção conceitos e objetivosLCAFRJAinda não há avaliações
- Introdução A Tecnologia CAMDocumento53 páginasIntrodução A Tecnologia CAMJosias SantosAinda não há avaliações
- Apostila Solid Works Apost Corre - o 2.3Documento120 páginasApostila Solid Works Apost Corre - o 2.3luisbottonAinda não há avaliações
- Apostila CAMDocumento43 páginasApostila CAMMarcio Costa RosaAinda não há avaliações
- Comandos Eletricos DiagramasDocumento45 páginasComandos Eletricos Diagramasandersonalves_cruzAinda não há avaliações
- Manutenção conceitos e objetivosDocumento78 páginasManutenção conceitos e objetivosLCAFRJAinda não há avaliações
- 9-Estratégia de ProduçãoDocumento20 páginas9-Estratégia de Produçãoandersonalves_cruzAinda não há avaliações
- ElipseE3 v3.2Documento198 páginasElipseE3 v3.2Wilson Silva SousaAinda não há avaliações
- Desenho 2 RevisaoDocumento1 páginaDesenho 2 Revisaoandersonalves_cruzAinda não há avaliações
- Apostila CATIA V5Documento35 páginasApostila CATIA V5brunomaimoneAinda não há avaliações
- MT4W - Manual PortuguêsDocumento1 páginaMT4W - Manual Portuguêsandersonalves_cruzAinda não há avaliações
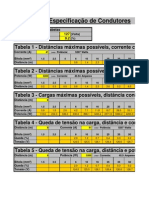
- Tabela DimencionamentoDocumento16 páginasTabela Dimencionamentodanillonica1Ainda não há avaliações
- AutoCAD 2010 - AtualizaçãoDocumento181 páginasAutoCAD 2010 - AtualizaçãoMaria Clara de Albuquerque100% (1)
- Apostila - Controladores Logicos Programaveis PDFDocumento11 páginasApostila - Controladores Logicos Programaveis PDFmarcos_lopes71Ainda não há avaliações
- CLP Linguagem LadderDocumento19 páginasCLP Linguagem Ladderandersonalves_cruzAinda não há avaliações
- Visao Geral Sap Parte 1Documento60 páginasVisao Geral Sap Parte 1andersonalves_cruzAinda não há avaliações
- Programa o LADDER - Micro Control Adores Microchip PICDocumento9 páginasPrograma o LADDER - Micro Control Adores Microchip PIChmprique10Ainda não há avaliações
- Eletricidade, Magnetismo e Física Moderna - Teoria e ExerciciosDocumento227 páginasEletricidade, Magnetismo e Física Moderna - Teoria e ExerciciosMichelle100% (4)
- Apo CLPsDocumento40 páginasApo CLPsAlthoffmannAinda não há avaliações
- Instalação base teste autoatendimentoDocumento22 páginasInstalação base teste autoatendimentoMicroCell AtcAinda não há avaliações
- Aspectos Fitossociológicos Do Bosque Rodrigues Alves - Jardim Botânico Da Amazônia, 15 Hectares de Floresta Preservada em Meio Ao Espaço Urbano Da Cidade de Belém PDFDocumento4 páginasAspectos Fitossociológicos Do Bosque Rodrigues Alves - Jardim Botânico Da Amazônia, 15 Hectares de Floresta Preservada em Meio Ao Espaço Urbano Da Cidade de Belém PDFEmilio MilitoAinda não há avaliações
- Cortinas isolantes Asalit: comparativo de modelos TP 600, TS 1000, TS 550 e TA 43Documento5 páginasCortinas isolantes Asalit: comparativo de modelos TP 600, TS 1000, TS 550 e TA 43Ariane SouzaAinda não há avaliações
- Materiais de Construção II-Cerâmicas PDFDocumento61 páginasMateriais de Construção II-Cerâmicas PDFAline PinheiroAinda não há avaliações
- catalogo08-2021-9-10-XZ英文样本21-7-21 - 单页 (翻译版) - V1Documento36 páginascatalogo08-2021-9-10-XZ英文样本21-7-21 - 单页 (翻译版) - V1MarcioAlbertooAinda não há avaliações
- Introdução ao Proxy IPCOP e seus recursosDocumento20 páginasIntrodução ao Proxy IPCOP e seus recursosJunior MarchiAinda não há avaliações
- Introdução Ao AzureDocumento12 páginasIntrodução Ao AzureRodrigo José SouzaAinda não há avaliações
- Guia de requisição de perícias ambientais MGDocumento96 páginasGuia de requisição de perícias ambientais MGjuniorsapiensAinda não há avaliações
- Filtro MFB ganho infinitoDocumento44 páginasFiltro MFB ganho infinitoLucas OliveiraAinda não há avaliações
- Divulgação científica da Biblos no MendeleyDocumento1 páginaDivulgação científica da Biblos no MendeleyMaison RobertoAinda não há avaliações
- J629 - Projeto Do ObjetoDocumento2 páginasJ629 - Projeto Do ObjetoEliane GalloAinda não há avaliações
- Seleção e Combinação Criativa de FontesDocumento24 páginasSeleção e Combinação Criativa de FontesGer MayAinda não há avaliações
- Fechadura KAADAS ApresentaçãoDocumento9 páginasFechadura KAADAS ApresentaçãoStandartAinda não há avaliações
- Chopper RoadDocumento42 páginasChopper RoadDaiane LealAinda não há avaliações
- Ementa disciplinaDocumento4 páginasEmenta disciplinaRaphael FreitasAinda não há avaliações
- Oc Aula 05Documento28 páginasOc Aula 05Raphael QuintanilhaAinda não há avaliações
- 19 - DiagramaDocumento5 páginas19 - DiagramaPredador StealthAinda não há avaliações
- Indústria 4.0 - Apresentação PowerpointDocumento37 páginasIndústria 4.0 - Apresentação PowerpointnoplayydaAinda não há avaliações
- Manual ITC 4100 Tools Portugues 01-14 SiteDocumento22 páginasManual ITC 4100 Tools Portugues 01-14 SiteCrimaros MartinezAinda não há avaliações
- SE Manual Operaçao e Manutençao 01-10-2008Documento82 páginasSE Manual Operaçao e Manutençao 01-10-2008Rodrigo Debora BelloniAinda não há avaliações
- Relatorio 8Documento3 páginasRelatorio 8Leonardo Diniz OliveiraAinda não há avaliações
- TurbofanDocumento4 páginasTurbofanGabriela NegreirosAinda não há avaliações
- 5ºano Manhã Energia ElétricaDocumento18 páginas5ºano Manhã Energia ElétricaInformticaMaiaAinda não há avaliações