Você também pode gostar
- Articulo CientificoDocumento6 páginasArticulo Cientificojuanmdh0710Ainda não há avaliações
- Capitulo VDocumento6 páginasCapitulo VRoberto Flores PerezAinda não há avaliações
- Operador de Drones Ante La: Proceso de Certificación ComoDocumento14 páginasOperador de Drones Ante La: Proceso de Certificación ComoJoseAinda não há avaliações
- TRANSPORTE AEREO - FIO UNaMDocumento9 páginasTRANSPORTE AEREO - FIO UNaMCortez CamiAinda não há avaliações
- Uso de Drones en Logistica para Entrega de MercanciasDocumento11 páginasUso de Drones en Logistica para Entrega de MercanciasvadavadaAinda não há avaliações
- Preguntas AdicionalesDocumento25 páginasPreguntas AdicionalesYordyWilliamsCaceresQuispeAinda não há avaliações
- Diseñando Un DronDocumento15 páginasDiseñando Un DronJean Carlo100% (1)
- Cap-6-1 Edificios Terminales de PasajerosDocumento24 páginasCap-6-1 Edificios Terminales de PasajerosMariano GranateAinda não há avaliações
- Introduccion A Un Proyecto de AeropuertosDocumento11 páginasIntroduccion A Un Proyecto de AeropuertosRamon SalgadoAinda não há avaliações
- Presentación AutoridadDocumento21 páginasPresentación AutoridadLuis Felipe UribeAinda não há avaliações
- Construccion de Un CuadricopteroDocumento31 páginasConstruccion de Un CuadricopteroAlan Aceves Arteaga100% (1)
- SMGCS AtmDocumento12 páginasSMGCS Atmandrea martin santa olallaAinda não há avaliações
- Drones Revolucionan Ejercicio Profesional Del Ingeniero TopógrafoDocumento5 páginasDrones Revolucionan Ejercicio Profesional Del Ingeniero TopógrafocanitoxxAinda não há avaliações
- UAV Regulacion y Estado Del ArteDocumento9 páginasUAV Regulacion y Estado Del ArteJuan Taniata100% (1)
- Tema 2 AeropuertosDocumento14 páginasTema 2 AeropuertosAbimael Mamani100% (1)
- Un Algoritmo ALNS para El VRPD en La Distribución de Última MillaDocumento23 páginasUn Algoritmo ALNS para El VRPD en La Distribución de Última Millaing.tarazona.jimenezAinda não há avaliações
- EdsDocumento24 páginasEdsLaura Encinas EscobarAinda não há avaliações
- Mantenimientos de Pavimentos Flexibles de AeropuertosDocumento25 páginasMantenimientos de Pavimentos Flexibles de AeropuertosS Antho ArdilesAinda não há avaliações
- Plan MaestroDocumento61 páginasPlan MaestroJose Eduard JooAinda não há avaliações
- Proyecto AA 2000 El PalomarDocumento70 páginasProyecto AA 2000 El PalomarEl Destape50% (2)
- Primer Avance AnteproyectoDocumento5 páginasPrimer Avance AnteproyectoMiguel Angel Murcia BuitragoAinda não há avaliações
- QuimicaDocumento8 páginasQuimicajosephAinda não há avaliações
- Contrato InternacionalDocumento7 páginasContrato InternacionalAngie CervantesAinda não há avaliações
- Concepto de DronesDocumento22 páginasConcepto de DronesAriel UrietaAinda não há avaliações
- Analisis SDP Compañia Aerea Espigon Sur t1Documento11 páginasAnalisis SDP Compañia Aerea Espigon Sur t1Atc LatinoAinda não há avaliações
- Trafico AereoDocumento21 páginasTrafico AereoUlises ValerioAinda não há avaliações
- Diseno Estructural de Pavimentos para AeropuertosDocumento174 páginasDiseno Estructural de Pavimentos para AeropuertosAndres Pez100% (4)
- Control de Una Aeronave No Tripulada - Proyecto 1 - Cristian ManceraDocumento2 páginasControl de Una Aeronave No Tripulada - Proyecto 1 - Cristian ManceraCristian ManceraAinda não há avaliações
- Características Esenciales Del Transporte AéreoDocumento7 páginasCaracterísticas Esenciales Del Transporte Aéreoanabelsubia99Ainda não há avaliações
- Last2 U2 A1 BLJQ 1Documento8 páginasLast2 U2 A1 BLJQ 1Blanca Nena Jiménez100% (1)
- 141-Texto Del Artículo-905-2-10-20181211Documento10 páginas141-Texto Del Artículo-905-2-10-20181211prisotAinda não há avaliações
- Síntesis Ac NoDocumento6 páginasSíntesis Ac NoJOSUE4Ainda não há avaliações
- Trabajo CorreaDocumento248 páginasTrabajo CorreaAngel VargasAinda não há avaliações
- Operador de Aeronaves No Tripuladas Uas, Dron Clase A, B 144HDocumento6 páginasOperador de Aeronaves No Tripuladas Uas, Dron Clase A, B 144HClaudia Cristina Ramirez MontoyaAinda não há avaliações
- Tesis Drone USMDocumento67 páginasTesis Drone USMMarcelo SantibañezAinda não há avaliações
- AvionesDocumento11 páginasAvionesIvan RamosAinda não há avaliações
- Control de Lectura PDFDocumento6 páginasControl de Lectura PDFMeybel MedinaAinda não há avaliações
- Alistamiento de Sala de Maquinas - IntroduccionDocumento15 páginasAlistamiento de Sala de Maquinas - IntroduccionJorge Rojas Troche100% (1)
- Ensayo DronesDocumento2 páginasEnsayo DronesFredy Dino Esquivel VelasquezAinda não há avaliações
- 05-Control de Un Vehiculo AereoDocumento10 páginas05-Control de Un Vehiculo AereoLady Katherine Gomez SamboniAinda não há avaliações
- Normas Tecnicas Complementarias Ciudad Mexico 2017Documento6 páginasNormas Tecnicas Complementarias Ciudad Mexico 2017Dani Maikol TiconaAinda não há avaliações
- 1426 5616 1 PBDocumento13 páginas1426 5616 1 PBMiguelAinda não há avaliações
- Penguin B UAVDocumento9 páginasPenguin B UAVFelipe PinedaAinda não há avaliações
- Informe N2 de GutierresDocumento10 páginasInforme N2 de GutierresEsther Guillen GonzalesAinda não há avaliações
- Conferencia Drones - Mayo 2020Documento61 páginasConferencia Drones - Mayo 2020egdejuanaAinda não há avaliações
- AEROPUERTOS - IC119 - Rev1 PDFDocumento4 páginasAEROPUERTOS - IC119 - Rev1 PDFGustavo Isaza ZapataAinda não há avaliações
- 05 ControldeunvehiculoaereoDocumento11 páginas05 ControldeunvehiculoaereoLady Katherine Gomez SamboniAinda não há avaliações
- 1 Diseno AeronauticoDocumento15 páginas1 Diseno AeronauticoMoises RodriguezAinda não há avaliações
- Guia Enfasis 2Documento71 páginasGuia Enfasis 2Alejandro Moreno GarciaAinda não há avaliações
- Un Nuevo Paradigma en La Inspeccion en VueloDocumento2 páginasUn Nuevo Paradigma en La Inspeccion en VueloOlivier LaylyAinda não há avaliações
- Rediseño de La Línea de EnsambleDocumento15 páginasRediseño de La Línea de EnsambleDiego RosalesAinda não há avaliações
- 9613 - Manual PBN Cuarta Edición 2013.es Actualizado PDFDocumento416 páginas9613 - Manual PBN Cuarta Edición 2013.es Actualizado PDFtangauta100% (7)
- Ensayo SPLDocumento9 páginasEnsayo SPLJesus VazquezAinda não há avaliações
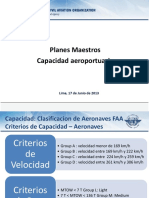
- 11 Capacidad AeroportuariaDocumento21 páginas11 Capacidad AeroportuariaHelen LozanoAinda não há avaliações
- Preguntas ExamenDocumento9 páginasPreguntas ExamenJuan Borrueco SerranoAinda não há avaliações
- Los Drones y Sus Aplicaciones en La Ingenieria CivilDocumento3 páginasLos Drones y Sus Aplicaciones en La Ingenieria CivilAndrws Mk JmAinda não há avaliações
- Uso de Drones en LogísticaDocumento5 páginasUso de Drones en LogísticaYiselAinda não há avaliações
- Nuevas Tecnologías en Carguío y Acarreo en MineríaDocumento3 páginasNuevas Tecnologías en Carguío y Acarreo en MineríaAxel Franco UribeAinda não há avaliações
- Operaciones y mantenimiento en compañías aéreasNo EverandOperaciones y mantenimiento en compañías aéreasAinda não há avaliações
- 16 Sistema de PresurizaciónDocumento40 páginas16 Sistema de PresurizaciónccoyureAinda não há avaliações
- Certificación RAP 111Documento7 páginasCertificación RAP 111ccoyureAinda não há avaliações
- 14 Sistema NeumáticoDocumento21 páginas14 Sistema Neumáticoccoyure100% (1)
- 15 Sistema de Aire AcondicionadoDocumento32 páginas15 Sistema de Aire AcondicionadoccoyureAinda não há avaliações
- Principios de Vuelo ATPL TrainingDocumento526 páginasPrincipios de Vuelo ATPL TrainingccoyureAinda não há avaliações
- 11 - Sangrado de AireDocumento53 páginas11 - Sangrado de Aireccoyure33% (3)
- Motores de AviacionDocumento72 páginasMotores de AviacionJesús Huanco AncoAinda não há avaliações
- Terminología OaciDocumento42 páginasTerminología OaciccoyureAinda não há avaliações
- Airfoil 2Documento15 páginasAirfoil 2ccoyureAinda não há avaliações
- Ignition and Starting SystemsDocumento86 páginasIgnition and Starting SystemsccoyureAinda não há avaliações
- Corrosion Por PicaduraDocumento8 páginasCorrosion Por PicaduraccoyureAinda não há avaliações
- Oil CFM56-3Documento19 páginasOil CFM56-3ccoyureAinda não há avaliações
- Corrosion Por PicaduraDocumento8 páginasCorrosion Por PicaduraccoyureAinda não há avaliações
- A340Documento4 páginasA340ccoyureAinda não há avaliações
- Nuevos Materiales en La Sociedad Del Siglo XXIDocumento122 páginasNuevos Materiales en La Sociedad Del Siglo XXIjvlmgAinda não há avaliações
- Cargador de Ruedas 994k Cat.Documento2 páginasCargador de Ruedas 994k Cat.edwinAinda não há avaliações
- Ficha Técnica Cemento Asfáltico AC 20 Pro RoadDocumento3 páginasFicha Técnica Cemento Asfáltico AC 20 Pro RoadSERGIO100% (1)
- Gestion de Logica TelesupDocumento109 páginasGestion de Logica TelesupAdolfo Sven Gomez Molina100% (2)
- Taller Diagrama de ClasesDocumento6 páginasTaller Diagrama de ClasesAsbel Miranda ValdesAinda não há avaliações
- Red de Abastecimiento de Agua Potable de RiobambaDocumento8 páginasRed de Abastecimiento de Agua Potable de RiobambaDiego MonteroAinda não há avaliações
- CV Luis Pucutay LeonDocumento2 páginasCV Luis Pucutay LeonLuis Pucutay LeónAinda não há avaliações
- Proyecto de InnovcionDocumento47 páginasProyecto de InnovcionJavier Quispe Hualpa100% (1)
- Procedimiento de Seguridad de Equipos Alza Hombres Obra Colegio AlerceDocumento11 páginasProcedimiento de Seguridad de Equipos Alza Hombres Obra Colegio AlerceCarla Benavides BarriaAinda não há avaliações
- Limadora Cepilladora PDFDocumento10 páginasLimadora Cepilladora PDFNelson DiazAinda não há avaliações
- Acreditable Maricely Lopez Act 4 4312Documento4 páginasAcreditable Maricely Lopez Act 4 4312Maricely LopezAinda não há avaliações
- Reglamento Transitorio Del Mercado EléctricoDocumento105 páginasReglamento Transitorio Del Mercado EléctricoJorge PerusinaAinda não há avaliações
- Ageies Vs IbcDocumento2 páginasAgeies Vs IbcMarcela MéndezAinda não há avaliações
- Direccionamiento IP (Autoguardado)Documento19 páginasDireccionamiento IP (Autoguardado)Jefferds CantilloAinda não há avaliações
- LineaCuestecitas LaLoma500kv GalvisAngie GarciaJesus GomezNathalia MurallasSebastian H1Documento30 páginasLineaCuestecitas LaLoma500kv GalvisAngie GarciaJesus GomezNathalia MurallasSebastian H1Natalia MantillaAinda não há avaliações
- AMP 045CD InstrDocumento24 páginasAMP 045CD Instrjogonza_oaxAinda não há avaliações
- Sesion 1 - Normativa Arquitectonica (Parte 1)Documento88 páginasSesion 1 - Normativa Arquitectonica (Parte 1)Cesar PugsioAinda não há avaliações
- Diseño de ExperimentosDocumento10 páginasDiseño de ExperimentosPaolo Bardales DiazAinda não há avaliações
- Acp-8em Catalogo EspDocumento4 páginasAcp-8em Catalogo EspMariö OlveraAinda não há avaliações
- Platea de CimentaciónDocumento48 páginasPlatea de CimentaciónSandra Arroyo ParedesAinda não há avaliações
- Balance Materia Estado EstacionarioDocumento31 páginasBalance Materia Estado EstacionarioBrandonlee Becquer De La Cruz SolorzanoAinda não há avaliações
- Condensador HorizontalDocumento6 páginasCondensador HorizontalJulian VelezAinda não há avaliações
- Ejemplo PDFDocumento12 páginasEjemplo PDFPriscilla TeAinda não há avaliações
- Diseño de Una Vivienda de Albañileria ConfinadaDocumento30 páginasDiseño de Una Vivienda de Albañileria ConfinadaFernando Quilli Dueñas100% (10)
- TecsupDocumento9 páginasTecsupAnthonyAinda não há avaliações
- Trabajo Final de Ventilacion 1Documento11 páginasTrabajo Final de Ventilacion 1amigovirtualz4401Ainda não há avaliações
- Turbofan Vs TurbopropDocumento13 páginasTurbofan Vs TurbopropJhoab Jchs ChaconAinda não há avaliações
- Informe Previo N2 Microelectronica UnmsmDocumento11 páginasInforme Previo N2 Microelectronica UnmsmRussell Oscar QFAinda não há avaliações
- Analisis Funcional de CSVDocumento36 páginasAnalisis Funcional de CSVEduardo PintoAinda não há avaliações
- Resumen GaserosDocumento22 páginasResumen Gaserosclaudia salasAinda não há avaliações
- Fluke Spain SpaDocumento14 páginasFluke Spain SpaVicent JesusAinda não há avaliações