IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE)
e-ISSN: 2278-1676,p-ISSN: 2320-3331, Volume 9, Issue 2 Ver. I (Mar Apr. 2014), PP 53-59
www.iosrjournals.org
www.iosrjournals.org 53 | Page
Study and analysis of Differential GNSS and Precise Point
Positioning
Abhijit Dey
1
, Dr.V.Malleswara Rao
2
1
(Department of Electronics & Communication, GITAM University, INDIA)
2
(Department of Electronics & Communication, GITAM University, INDIA)
Abstract: The Global Positioning system (GPS) is used for navigation and associated tasks in wide variety of
applications. One of the primary modes of GPS operation is differential GPS. Differential GPS allows more
accurate positioning than stand-alone GPS. Many new applications are possible because of the increased
accuracy obtained through differential GPS. In this paper the techniques and methods of differential GPS along
with the algorithms are discussed which are providing more accurate and precise positioning in recent trends of
communication. The purpose of the paper is to introduce the principles of differential GPS theory, and to
provide a background for more advanced material.
Keywords: DGNSS (Differential navigation satellite system), PPP (Precise point positioning), RR (Reference
receiver), UR (User receiver)
I. INTRODUCTION
The purpose of this work is to understand Differential GNSS algorithms, precise point positioning for
better positioning and to obtain in real time, the position coordinates of the stationary user GPS receiver
applying corrections given by the differential GPS technique (DGPS), as well as to compare different methods
of DGPS implementations. Although the Global Positioning (GPS) was originally developed for navigation
purposes, it has also shown to be an important source of information for vehicle attitude determination.
Fig 1: GPS satellites and receiver for coordinates.
Today, GPS aims to provide continuous 24 hours a day and 365 days a year 3-Dimensional positioning whether
real-time or post processing at any location all over the world. Because the receiver clock is not synchronized
with the satellite clock, this synchronization is the reason for the term pseudo range which measured via code
and/or carrier phase. So, normally at least four satellites have to be observed at the same time to determine the
3D position and receiver clock bias, which is showed in Figure 1, where SV1, SV2, SV3, and SV4 are four
satellites,
1
r to
4
r are pseudoranges from corresponding satellites to receiver r.
GPS radio waves experience several changes as they pass through the ionosphere. A quiet ionosphere introduces
the well-known code delay and phase advance effects.
Fig 2: The undisturbed and disturbed ionosphere and the scintillation imaging array.
Study and analysis of Differential GNSS and Precise Point Positioning
www.iosrjournals.org 54 | Page
The left half of Fig. 2 depicts the scenario where a GPS signal passes through a quiet portion of the ionosphere
to a receiver situated on the ground.
The differential GPS technique consists of two major steps: 1) generating corrections on a reference
base; 2) applying the corrections on the user receiver. The basic idea behind DGPS assumes that if two
receivers are relatively close to each other (about up to 150 km), the GPS radio signals will travel in very close
paths, thus the atmospheric (ionosphere and troposphere) effects will be practically the same. These effects are
spatially correlated, i. e., the magnitude error is dependent of the baseline length. The application of the
corrections to both receivers makes therefore the final result more accurate (Strang and Borre, 1997).In this
DGPS technique care of using only the simultaneously visible satellites for both receivers should be taken.
DGPS techniques. This investigation paves the basis to develop a real time differential GPS system to be further
implemented in dynamically mobile platforms, like aircraft, ships, and cars.
II. DIFFERENTIAL GPS
Differential GPS involves the use of two GPS receivers. One receiver is located at a fixed position that
is accurately surveyed, while the other is allowed to move around. The goal is to accurately determine the
position of the roaming receiver.
Fig 3: General representation of differential GPS
Differential GPS (DGPS) is a relatively simple technique to improve positional accuracy and integrity. This
technique was developed in early 1980s and it is widely used in various forms. The system consists of a
Reference Receiver (RR) located at a known location that has been previously surveyed, and one or more DGPS
User Receivers (UR). The RR antenna, differential correction processing system, and datalink equipment (if
used) are collectively called the Reference Station (RS). Both the UR and the RR data can be collected and
stored for later processing, or sent to the desired location in real time via the data link. DGPS is based on the
principle that receivers in the same vicinity will simultaneously experience common errors on a particular
satellite ranging signal. In general, the UR (mobile receivers) use measurements from the RR to remove the
common errors. In order to accomplish this, the UR must simultaneously use a subset or the same set of
satellites as the reference station. The DGPS positioning equations are formulated so that the common errors
cancel.
2.1 Differencing Techniques [3]
2.1.1Single differencing
The purpose of single differencing is to eliminate satellite clock bias. Consider the observation equations for two
receivers, A and B observing same satellite, j:
L
j
A
=
j
A
+ c
A
- c
j
+ Z
j
A
- I
j
A
+ B
j
A
L
j
B
=
j
B
+ c
B
- c
j
+ Z
j
B
- I
j
B
+ B
j
B
The single difference phase is defined as the difference between these two:
L
j
AB =
L
j
A -
L
j
B
= (
j
A
+ c
A
- c
j
+ Z
j
A
- I
j
A
+ B
j
A) (
j
B
+ c
B
- c
j
+ Z
j
B
- I
j
B
+ B
j
B)
= (
j
A -
j
B) + (
c
A -
c
B) (
c
j
- c
j)
+ ( Z
j
A
- Z
j
B
) (I
j
A
- I
j
B
) ( B
j
A -
B
j
B
)
=
j
AB
+ c
AB
+ Z
j
AB
- I
j
AB
+ B
j
AB
where we use the double-subscript to denote quantities identified with two receivers, and the triangular symbol
as a mnemonic device, to emphasise that the difference is made between two points on the ground. The
geometry of single differencing is illustrated in Fig 4.
Study and analysis of Differential GNSS and Precise Point Positioning
www.iosrjournals.org 55 | Page
Fig 4: Single difference method.
2.1.2. Double Differencing
The purpose of double differencing is to eliminate receiver clock bias. Consider the single
differenced observation equations for two receivers A and B observing satellites j and k:
Fig 5: Double difference method.
L
j
AB
=
j
AB
+ c
AB
+ Z
j
AB
- I
j
AB
+ B
j
AB
L
k
AB
=
k
AB
+ c
AB
+ Z
k
AB
I
k
AB
+ B
k
AB
The double difference phase is defined as the difference between these two:
L
jk
AB
= L
j
AB
- L
k
AB
= (
j
AB
+ c
AB
+ Z
j
AB
- I
j
AB
+ B
j
AB
)
-(
k
AB
+ c
AB
+ Z
k
AB
I
k
AB
+ B
k
AB
)
= (
j
AB
-
k
AB
) +( c
AB
- c
AB
) + (Z
j
AB
- Z
k
AB
) (I
j
AB
- I
k
AB
) (B
j
AB
- B
k
AB
)
=
jk
AB
+ Z
jk
AB
- I
jk
AB
+ B
jk
AB
where we use the double-superscript to denote quantities identified with two satellites, and the upside-down
triangular symbol as a mnemonic device, to emphasise that the difference is made between two points in the
sky. Fig 5 illustrates the geometry of double differencing.
2.1.3 Double Differenced Ambiguity
The double difference combination has an additional advantage, in that the ambiguity is an integer:
B
jk
AB
= B
j
AB
B
k
AB
= (B
j
A
B
j
B
) (B
k
A
B
k
B
)
=
o
(
oA
-
j
o
- N
j
A
) -
o
(
oB
-
j
o
- N
j
B
) -
o
(
oA
k
o
N
k
A
) +
o
(
oB
k
o
N
k
B
)
= -
o
(N
j
A
- N
j
B
N
k
A
N
k
B
)
= -
o
N
jk
AB
Hence we can write the double differenced phase observation equation :
L
jk
AB
=
jk
AB
+ Z
jk
AB
-I
jk
AB
-
o
N
jk
AB
From the point of view of estimation, it makes no difference whether we use a minus or plus sign for N, so long
as the partial derivative has a consistent sign (which, for the above equation, would be - o).
Study and analysis of Differential GNSS and Precise Point Positioning
www.iosrjournals.org 56 | Page
2.1.4. Triple Differencing
Fig 6: Triple difference method.
L
jk
AB
(i) =
jk
AB
(i) + Z
jk
AB
(i) -I
jk
AB
(i) -
o
N
jk
AB
L
jk
AB
(i+1) =
jk
AB
(i+1) + Z
jk
AB
(i+1) -I
jk
AB
(i+1) -
o
N
jk
AB
The triple difference phase is defined as the difference between these two:
(i,i+1) L
jk
AB
=L
jk
AB
(i+1) - L
jk
AB
(i)
= (i,i+1)
jk
AB
(i)+ (i,i+1) Z
jk
AB
(i) - (i,i+1) I
jk
AB
(i)
where we use the delta symbol to indicate the operator that differences data between epochs. Fig
6 illustrates triple differencing geometry.
All DGNSS techniques perform positioning relative to one or more reference GNSS receivers located at points
of known coordinates. Depending upon the type of GNSS measurement, user equipment, reference receiver
infrastructure, data processing algorithm, ancillary products or services, and operational requirements (e.g. real-
time or post mission, moving or static user equipment, good or poor satellite and reference receiver geometry,
etc.), different levels of performance are obtained. For example, the basic DGNSS technique using single-
frequency pseudo-range measurements can deliver few-metre to submetre positioning accuracy, in either local-
area DGNSS or wide-area DGNSS implementations.
The processing of carrier phase data enables sub-decimeter-level accuracy, with the highest operational
accuracy being possible (at the few-centimeter level) using the most sophisticated receiver equipment and
algorithms, even in real-time and with the user equipment in motion (the so-called RTK mode).
Over the time period the technique of Precise Point Positioning (PPP) has been touted as an alternative for the
infrastructure-hungry carrier phase-based DGNSS techniques. Although PPP suffers from several
disadvantages slow convergence times, no user equipment supports real-time algorithms, no real-time satellite
orbit and clock data streams, uncertain coordinate datum recent PPP developments could address most of these
disadvantages.
For computing range and range rate corrections at a base station. Let denote the geometric distance between
the satellite and the receiver antennas, dt
i
denote the receiver clock offset
,
dt
k
the satellite clock offset, and T the
tropospheric delay. Then the corrected range is computed as [4]
* = +cdt
i
-cdt
k
+ T
and the range correction as
d= * - P
obs
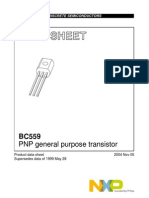
The fig 7 shows the range and range corrections over 200 epochs. The plot is obtained by using Matlab R2012b.
It shows the differential corrections of each satellite at the base station.IIsc Bangalore January 1, 2014 data is
used for the analysis.
Study and analysis of Differential GNSS and Precise Point Positioning
www.iosrjournals.org 57 | Page
Fig 7: shows range and range rate corrections over 200 epochs using January 1, 2014, data [IISC Bangalore]
III. PRECISE POINT POSITIONING
The Precise point positioning (PPP) is a method that performs precise position determination using a
single GPS receiver. This positioning approach arose from the advent of widely available precise GPS orbit and
clock data products with centimeter accuracy. These data can be applied to substantially reduce the errors in
GPS satellite orbits and clocks, two of the most significant error sources in GPS positioning.
Combining precise satellite positions and clocks with a dual-frequency GPS receiver (to remove the first order
effect of the ionosphere), PPP is able to provide position solutions at centimeter to decimeter level, which is
appealing to many applications such as airborne mapping. PPP is different from double-difference RTK (real-
time kinematic) positioning that requires access to observations from one or more base stations with known
coordinates. The word precise is also used to distinguish it from the conventional point positioning techniques
that use only code or phase smoothed code as the principal observable for position determination.
The PPP method can offer several significant advantages to applications compared to differential precise
positioning techniques. First, PPP involves only a single GPS receiver and, therefore, removes the need for GPS
users to establish local base stations. As a result, it eliminates the spatial operating range limit as well as the
constraint of simultaneous observations on both rover and base receivers imposed by the differential RTK
technique.
3.1. Single-Frequency PPP
Although the prospect of triple-frequency PPP is tantalising, such a capability is many years away from
being a reality. On the other hand, dual frequency PPP has already demonstrated the capability of providing
accurate position solutions at the sub-decimeter level for kinematic positioning and sub-centimeter level for
static positioning. However, since the majority of the mass-market GNSS users (navigation and GIS) operate
single-frequency GPS receivers, PPP using a single-frequency GPS receiver has the potential to open up PPP to
a broader range of applications. The large errors in single-frequency PPP, after the application of precise GPS
orbit and clock products, are mainly due to ionospheric effects which cannot be mitigated effectively using
single-frequency measurements (Chen and Gao, 2005).Using the Klobuchar model, based on the ionospheric
coefficients broadcast from the GPS satellites, is the simplest way to mitigate the ionospheric delay on
measurements in single frequency PPP. However, only about 50-60% of the total ionospheric effects are
mitigated (Klobuchar, 1996).
IGS has generated products with information on Total Electron IGS has generated products with
information on the Total Electron Content (TEC) of the ionosphere on a global scale since 1998
(http://igs.org/projects/iono/index.html).
3.2. Dual-Frequency PPP
Unlike with differential processing, in PPP the full effect of tropospheric delays must be estimated
explicitly, resulting in an additional unknown zenith tropospheric delay (ZTD) parameter that must be
estimated along with the position. Further, the standard approach in PPP for handling ionospheric delays is to
use a dual-frequency receiver and form the ionosphere-free linear combination of L1 and L2 carrier phase and
pseudorange observations. The PPP algorithm may use both the ionosphere-free linear combinations of carrier
phase and pseudorange observations, or only the ionosphere-free linear combination of carrier phase
observations. Using the pseudorange observations makes a difference for the initial convergence, but the final
solution is almost fully dependent on the carrier phase data.
Study and analysis of Differential GNSS and Precise Point Positioning
www.iosrjournals.org 58 | Page
The ionosphere-free linear combination is very noisy as it amplifies multipath and receiver measurement errors.
The ionosphere-free linear combination is also very costly in terms of redundancy: from four dual-frequency
code and carrier phase observations, only two ionosphere-free observations remain. In fact, if both the
ionosphere-free linear combination of code and carrier phase data are formed, the ionosphere delay is eliminated
twice (in other words, we estimate the ionosphere delay once from the code measurements and once from the
carrier phase measurements). Typically, the noise in the ionosphere-free linear combinations would be a factor-
three higher compared to the original observations.
Fig 8: Using dual frequency L1 & P1 precise point positioning (Lat long alt) using January 13, 2014 data [IISC
Bangalore].
Fig 9: Number of visible satellites.
IV. RESULT AND DISCUSSIONS
The concept of Differential GPS (DGPS) is understood along with DGPS algorithms which include
single, double and triple difference method. The range and range rate corrections are done in Matlab
environment. The output of the range rate corrections are shown in figure7.IIsc Bangalore January 1, 2014
Rinex (navigation and observation) data is used for the analysis. Satellite wise range correction is done, for this
pseudo code C1 is used. A differential correction at the base station is computed as shown in figure 7.
Further the approach of precise point positioning is explained and using dual frequency (L1 & P1)
codes the PPP (Precise Point Positioning) is done in Matlab environment. The precise point is computed at
every 30 seconds and figures 8 shows the computed PPP w.r.t time (seconds). In figure 8 the plots shows the
latitude, longitude and altitude at every 30 seconds. Fig 9 shows the number of satellites available at that time.
The solid lines indicate the visible satellites plotted w.r.t. GPS time in hours.
Acknowledgements
The authors of this paper would like to acknowledge all the corresponding IEEE paper holders and
most importantly the publishers of related books and journals which gave immense support and inspiration in
preparing this manuscript. Above all, the extreme mental support and source of inspiration from all the family
members and friends are widely acknowledged.
REFERENCES
[1] Farrell, J.A., and M.Barth, The Global Positioning System and Inertial Navigation, McGraw-Hill, ISBN-0-07-022045-X, 1999.
[2] Kaplan, E., ed., Understanding GPS: Principles and Application Boston: Artech House, c1996
[3] Geoffrey Blewitt., Geodetic applications of GPS: Basics of GPS techniques, Swedish Land Survey
[4] Kai Borre, Easy GPS suite II:Inside GNSS,June 2010
Study and analysis of Differential GNSS and Precise Point Positioning
www.iosrjournals.org 59 | Page
[5] Chao, C.H. (1998). High Precision Differential GPS. MSc Dissertation. Institute of Engineering Surveying and Space Geodesy
(Institute of Engineering Surveying and Space Geodesy (IESSG)) University of Nottingham.
[6] RTCM Special Committee No. 104. (1990). RTCM Recommended Standards for Differential NAVSTAR GPS Service. Radio
Technical Committee for Maritime Services. Paper 134-89/SC104- 68. Washington DC (USA).
[7] Walsh, D. (1994). Kinematic GPS Ambiguity Resolution. PhD Thesis, Institute of Engineering Surveying and Space Geodesy
(IESSG), University of Nottingham..
[8] Ko, P.Y. (1997). Wide Area Differential GPS (WADGPS). PhD Thesis. Stanford University (USA).
Você também pode gostar
- Effects of Formative Assessment On Mathematics Test Anxiety and Performance of Senior Secondary School Students in Jos, NigeriaDocumento10 páginasEffects of Formative Assessment On Mathematics Test Anxiety and Performance of Senior Secondary School Students in Jos, NigeriaInternational Organization of Scientific Research (IOSR)100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Necessary Evils of Private Tuition: A Case StudyDocumento6 páginasNecessary Evils of Private Tuition: A Case StudyInternational Organization of Scientific Research (IOSR)Ainda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Youth Entrepreneurship: Opportunities and Challenges in IndiaDocumento5 páginasYouth Entrepreneurship: Opportunities and Challenges in IndiaInternational Organization of Scientific Research (IOSR)100% (1)
- Factors Affecting Success of Construction ProjectDocumento10 páginasFactors Affecting Success of Construction ProjectInternational Organization of Scientific Research (IOSR)Ainda não há avaliações
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Comparison of Explosive Strength Between Football and Volley Ball Players of Jamboni BlockDocumento2 páginasComparison of Explosive Strength Between Football and Volley Ball Players of Jamboni BlockInternational Organization of Scientific Research (IOSR)Ainda não há avaliações
- Design and Analysis of Ladder Frame Chassis Considering Support at Contact Region of Leaf Spring and Chassis FrameDocumento9 páginasDesign and Analysis of Ladder Frame Chassis Considering Support at Contact Region of Leaf Spring and Chassis FrameInternational Organization of Scientific Research (IOSR)Ainda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Design and Analysis of An Automotive Front Bumper Beam For Low-Speed ImpactDocumento11 páginasDesign and Analysis of An Automotive Front Bumper Beam For Low-Speed ImpactInternational Organization of Scientific Research (IOSR)Ainda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Fatigue Analysis of A Piston Ring by Using Finite Element AnalysisDocumento4 páginasFatigue Analysis of A Piston Ring by Using Finite Element AnalysisInternational Organization of Scientific Research (IOSR)Ainda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Solutions Manual To Introduction To Continuum Mechanics: Second EditionDocumento247 páginasSolutions Manual To Introduction To Continuum Mechanics: Second EditionRaj Pratyush80% (5)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Vega Antennas 131-133Documento3 páginasVega Antennas 131-133siroguzAinda não há avaliações
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Chapter 2 Lecture Nuclear Stability and ModelsDocumento24 páginasChapter 2 Lecture Nuclear Stability and ModelsSepamoAinda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- SPM General CatalogDocumento40 páginasSPM General CatalogNailuth García100% (1)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Bridge NotesDocumento32 páginasBridge NotesJaydee100% (1)
- ACI 504 (R1997) Guide To Sealing Joints in Concrete StructuresDocumento44 páginasACI 504 (R1997) Guide To Sealing Joints in Concrete Structuresphilipyap100% (1)
- Lecture 24 - Prestressed ConcreteDocumento12 páginasLecture 24 - Prestressed ConcretejeovanAinda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- A Presentation On Lithium Bromide Absorption Refrigeration SystemDocumento15 páginasA Presentation On Lithium Bromide Absorption Refrigeration SystemAyub GNAinda não há avaliações
- BN-S-UC001B Checklist For The Mechanical Completion, Incl. Pre-Commissioning ActivitiesDocumento13 páginasBN-S-UC001B Checklist For The Mechanical Completion, Incl. Pre-Commissioning ActivitiesGiftObionochieAinda não há avaliações
- Fundamentals of Digital Image Processing - A Practical Approach With Examples in Matlab Chris Solomon, Toby BreckonDocumento3 páginasFundamentals of Digital Image Processing - A Practical Approach With Examples in Matlab Chris Solomon, Toby Breckonశ్రీనివాస బాబ్జి జోస్యులAinda não há avaliações
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- A7 - 20-SEP-2016 - RM001 - POCE5 - Module-4-Energy Balance-NumericalsDocumento17 páginasA7 - 20-SEP-2016 - RM001 - POCE5 - Module-4-Energy Balance-NumericalssantoshAinda não há avaliações
- BC 559 CDocumento7 páginasBC 559 CAndy SanchezAinda não há avaliações
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- School of Basic Sciences and Research, Sharda University Physics Laboratory ManualDocumento5 páginasSchool of Basic Sciences and Research, Sharda University Physics Laboratory ManualNiboli ZhimomiAinda não há avaliações
- Catalog PlasfabDocumento8 páginasCatalog PlasfabDeep ZaveriAinda não há avaliações
- IBA Test Prep MaterialDocumento3 páginasIBA Test Prep MaterialAmmar Hassan67% (9)
- Basic Data Viper40 15066 enDocumento10 páginasBasic Data Viper40 15066 enArmando RiveraAinda não há avaliações
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Cotton Dyeing With Natural Dye Extracted From Pomegranate PDFDocumento5 páginasCotton Dyeing With Natural Dye Extracted From Pomegranate PDFAmalia RizkaAinda não há avaliações
- CBSE Previous Year Question Papers Class 12 Maths Set 1 2018 Marking Scheme PDFDocumento15 páginasCBSE Previous Year Question Papers Class 12 Maths Set 1 2018 Marking Scheme PDFNavsAinda não há avaliações
- WP Correct Weight-Handling enDocumento4 páginasWP Correct Weight-Handling enbertan dağıstanlıAinda não há avaliações
- Slides OctaveDocumento24 páginasSlides Octaveamru_rzlAinda não há avaliações
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Volcanic SoilsDocumento14 páginasVolcanic SoilsVictor Hugo BarbosaAinda não há avaliações
- Australia Shell Spirax S6 AXME 80W-140 TDSDocumento2 páginasAustralia Shell Spirax S6 AXME 80W-140 TDSfdpc1987Ainda não há avaliações
- Korea Herald 20090512Documento1 páginaKorea Herald 20090512raiseyAinda não há avaliações
- CTSH - Technical Bulletin 97-1Documento4 páginasCTSH - Technical Bulletin 97-1hesigu14Ainda não há avaliações
- CIV2040S L3 Problems Basic Fluid PropertiesDocumento2 páginasCIV2040S L3 Problems Basic Fluid PropertiesMosameem ARAinda não há avaliações
- Answers & Solutions: JEE (Advanced) - 2019Documento40 páginasAnswers & Solutions: JEE (Advanced) - 2019Amogh VaishnavAinda não há avaliações
- Arc - Wleding Final Exam PDFDocumento13 páginasArc - Wleding Final Exam PDFronaldo de guzmanAinda não há avaliações
- State EstimationDocumento13 páginasState Estimationkubera uAinda não há avaliações
- Regulation 391ADocumento6 páginasRegulation 391Adnageshm4n244100% (1)