Escolar Documentos
Profissional Documentos
Cultura Documentos
Intro Ducci On
Enviado por
Dieego Barriiga0 notas0% acharam este documento útil (0 voto)
20 visualizações47 páginasDireitos autorais
© © All Rights Reserved
Formatos disponíveis
DOCX, PDF, TXT ou leia online no Scribd
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
© All Rights Reserved
Formatos disponíveis
Baixe no formato DOCX, PDF, TXT ou leia online no Scribd
0 notas0% acharam este documento útil (0 voto)
20 visualizações47 páginasIntro Ducci On
Enviado por
Dieego BarriigaDireitos autorais:
© All Rights Reserved
Formatos disponíveis
Baixe no formato DOCX, PDF, TXT ou leia online no Scribd
Você está na página 1de 47
SISTEMAS DE CONTROL AUTOMATICO
En la actualidad las plantas industriales utilizan sistemas de control automtico en sus
procesos. Los sistemas de control automtico emplean equipos de cmputo para ejecutar
algoritmos de programacin de lgica discreta, lgica secuencial, ejecucin de algoritmos
de control automtico, administracin de alarmas, presentacin de resultados y
condiciones de proceso.
A continuacin se presenta un diagrama de bloques que permitir realizar una explicacin
general del funcionamiento de un sistema de control automtico en un entorno industrial.
TRANSDUCTOR
SISTEMA DE
CONTROL DE
PLANTA
ACTUADOR
CAMPO SALA DE CONTROL CAMPO
SENSOR ELEMENTO FINAL
INTERFAZ
HOMBRE-MAQUINA
HMI
Diagrama de Bloques de un Sistema de Control Industrial
Las variables fsicas de proceso, como la temperatura de un cuerpo, son captadas por
elementos sensores y dan una seal transducible que es una funcin de la variable fsica
de proceso medida. Los transmisores reciben estas seales de los sensores y las
convierten en una seal correspondiente pero de otra forma fsica distinta. En la
actualidad los transmisores ofrecen una seal de salida elctrica comunicable [1].
Las seales de salida de los transmisores son transmitidas elctricamente hacia el
sistema de control de planta, que recibe estas seales a travs de unas interfaces
conocidas como tarjetas de entradas y ejecuta algoritmos de lgica discreta y anloga
usando como datos de entrada la informacin recibida desde los transmisores. Esta
informacin es procesada y se generan como resultados rdenes que son transmitidas
elctricamente a travs de las tarjetas de salida hacia los actuadores que las reciben y
varan las condiciones de proceso, por ejemplo, activar una bomba centrifuga. La accin
de los actuadores trae como consecuencia la modificacin de las variables fsicas del
proceso que se quiere controlar.
El sistema de control automtico adems incluye una va de comunicacin bidireccional
con el usuario, esto se realiza a travs de una interfaz hombre-mquina. La funcin de
interfaz hombre-mquina (HMI por sus siglas en ingls) es mostrar grficamente los
valores de las variables fsicas de proceso, modificar parmetros de la lgica de control,
administrar alarmas y mostrar datos histricos de las variables de proceso.
El proceso de lectura de seales transmitidas desde campo, procesamiento en los
gabinetes del sistema de control, generacin y transmisin de rdenes hacia los
actuadores se repite cclicamente y es as como se realiza el control automtico de
procesos en entornos industriales.
SISTEMAS DE CONTROL DISTRIBUIDO
El sistema de control de una planta industrial se divide en subsistemas de control que se
encargan de leer las seales de entrada de los transmisores de campo, procesar estas
entradas, ejecutar algoritmos de control y enviar ordenes hacia los actuadores de una
parte especifica de la planta. Para cumplir con estas funciones se utilizan equipos de
cmputo conocidos como Sistemas de Control Distribuido.
Un controlador de propsito general es una unidad de cmputo modular integrada por:
- Una fuente que proporciona el suministro elctrico para el funcionamiento de los
circuitos electrnicos.
- Una unidad central de procesamiento de datos.
- Tarjetas de Entradas : Reciben datos de los transmisores de campo
- Tarjetas de Salida : Envian datos hacia los actuadores de campo
- Tarjetas de Comunicaciones : Envian y reciben datos en formato digital a otros
dispositivos electrnicos
Los controladores se montan en gabinetes elctricos protegidos en habitaciones
climatizadas conocidas como salas de control, la instrumentacin de campo se cablea
desde el campo hasta el controlador en sala de control.
Cuando todos los controladores estn comunicados entre si por algn tipo de red de datos
y comparten informacin como tendencias de variables de proceso, alarmas y pantallas
de operador se conoce como Sistema de Control Distribuido (DCS :Distributed Control
System)
DIAGRAMAS P&ID
Los diagramas P&ID, diagrama de tuberas e instrumentacin por sus siglas en ingls,
muestran la interconexin y dan referencias sobre la ubicacin en el campo de los
equipos de proceso e instrumentos utilizados para controlar un proceso industrial. Para
interpretar un diagrama P&ID utilizamos un conjunto estndar de smbolos definidos por la
norma ISA S5.1. [2]
Se muestra el diagrama P&ID de un tanque de distribucin de agua de refrigeracin de un
horno de fundicin. Previamente debemos decir que el objetivo de este sistema es
proporcionar un suministro constante de agua fra que circule por las paredes refrigerando
la estructura de un horno de fundicin.
TNK-001
VL-001
PMP-001
P-8
XY
101
LT
101
SY
101
Agua Fra
Agua Fra
S-10
101
LSH
101
LC
101
LSL
Diagrama P&ID de un estacin de bombeo
Observamos un tanque a cielo abierto, que recibe agua de enfriamiento desde una tubera
instalada en su parte superior y una bomba centrfuga que extrae agua del tanque por la
parte inferior. Los smbolos que corresponden a la instrumentacin son los siguientes:
LE-001: Elemento sensor de nivel por ultrasonido
LT-001: Transmisor con indicacin en campo instalado en la parte superior del tanque.
XY-001: Vlvula automtica montada en la tubera de ingreso de agua.
SY-001: Dispositivo que apaga o enciende el motor de la bomba centrifuga en base a la
seal elctrica de control recibida. La activacin de la bomba es remota desde un cuarto
de control.
LC-001: Controlador de nivel montado en gabinete elctrico (sala de control). Tiene como
objetivo mantener el valor del nivel de agua en el tanque igual a un valor pre-definido
denominado punto de consigna o Set Point, en ingls. Segn el diagrama P&ID para este
controlador el punto de consigna es 60% de la altura total del tanque medida desde su
base.
LSL-001, LSH-001: Dos alarmas de nivel de agua en el tanque: Muy alto, y muy bajo
montadas en gabinete elctrico.
Todos estos elementos estn interconectados a travs de seales elctricas el diagrama
P&ID permite inferir una descripcin del funcionamiento del sistema.
Para asegurar un suministro constante de agua fra el transmisor de nivel mide
constantemente el nivel del agua en el tanque, esta lectura es un valor anlogo
comprendido entre 0% y 100%, donde 100% representa el nivel mximo al que puede
llegar el agua dentro del tanque medido desde la base. Luego esta seal es convertida en
una seal elctrica comunicable y es transmitida hacia el controlador de nivel ubicado en
el cuarto de control. El controlador de nivel compara el valor del nivel recibido de campo
con el punto de consigna y ejecuta un algoritmo de control. Si existen diferencias entre el
valor del nivel de agua medido por el sensor y el nivel de agua definido por el punto de
consigna, el controlador transmitir una orden en forma de seal elctrica para abrir o
cerrar la vlvula automtica segn convenga.
Adems el controlador de nivel compara el valor del nivel recibido desde campo con el
valor de alarma de seguridad y emite una orden que es trasmitida hacia el arrancador de
la bomba que apaga el motor para evitar daos en la bomba centrifuga por cavitaciones y
succin de vaco cuando el nivel de agua en el tanque sea muy bajo.
La descripcin del proceso sugiere hacernos las siguientes preguntas respecto a la
comunicacin entre el controlador de nivel y la instrumentacin de campo.
Cmo se transmite el valor del nivel de agua dentro del tanque hacia el controlador?
Cmo se transmite la orden de apertura/ cierre de la vlvula automtica de alimentacin
y la orden de encendido/ apagado de los motores desde el centro de control?
Qu caractersticas tienen estas seales?
Cul es el medio fsico a travs del cual viajan todas estas seales?
En la siguiente parte responderemos todas estas preguntas y profundizaremos sobre la
comunicacin de seales de control en entornos industriales.
CLASIFICACION DE LA INSTRUMENTACION INDUSTRIAL
Definimos como instrumentacin industrial a todos los sensores, transmisores, actuadores
y sistemas computacionales que intervienen en el control de un proceso industrial [3].
Los transmisores podran clasificarse segn la variable fsica que miden, por ejemplo: En
transmisores de presin, de flujo o de temperatura. Tambin podran agruparse segn la
tecnologa de medicin en electromagnticos, generadores de tensin o ultrasnicos. Los
actuadores podran clasificarse segn el tipo de energa necesaria para su funcionamiento
en actuadores elctricos o neumticos. Los controladores podran clasificarse de acuerdo
a su tecnologa computacional en controladores lgicos programarles PLC o en sistemas
de control distribuido DCS.
Una clasificacin ms conveniente para el estudio que estamos desarrollado consiste en
clasificar la instrumentacin industrial segn el medio de comunicacin que utiliza para
transmitir o recibir la informacin de las variables de proceso a los controladores.
Distinguimos tres grandes grupos:
INSTRUMENTACIN INDUSTRIAL DISCRETA
La instrumentacin comprendida en este grupo corresponde a los transmisores y
actuadores que solo pueden estar en uno de dos posibles estados: apagado/ encendido,
activado/ desactivado, abierto/ cerrado, presente/ ausente, 1 o 0.
Un transmisor de proximidad inductivo detector de metales corresponde a este grupo
porque solo puede permanecer en dos estados: Metal presente o metal ausente.
El motor de una bomba puede incluirse en esta agrupacin, si la bomba solo funciona en
dos posibles estados: Motor encendido o motor apagado.
La variable fsica de inters solo puede permanecer en uno de dos posibles estados y se
transducen en la ausencia o presencia de un nivel de tensin de corriente. Los niveles de
tensin son seleccionables y dependen del sistema de control que se est utilizando, en
aplicaciones industriales estos niveles de tensin se encuentran en el rango de 10 a 265
VAC o 10 32 VDC [3].
TRANSMISORES DISCRETOS
Tienen una salida que se comporta como como un interruptor de dos posiciones que
puede ser normalmente abierto o normalmente cerrado, la posicin del interruptor es
controlada por la variable fsica de proceso. Por ejemplo: Un sensor detector de posicin
fin de carrera elctricamente se comporta como un interruptor normalmente abierto,
cuando un cuerpo metlico es detectado dentro de la regin de deteccin del sensor de
proximidad, el interruptor cambia de posicin de interruptor abierto a interruptor cerrado,
de esta manera se interrumpe o permite el paso de corriente elctrica a travs del mismo
segn corresponda.
Para que la informacin de campo de este tipo de transmisores sea transmitida e
interpretada por un sistema de control de planta se conectan la salida de los transmisores
discretos con las interfaces de entrada de los sistemas de control de la siguiente manera:
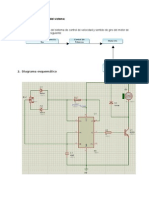
Diagrama Esquemtico del Circuito para Una Entrada Discreta
En el circuito se distinguen tres elementos:
Transmisor de campo : Es un interruptor cuya posicin es controlada por una variable
fsica, puede ser un botn, un sensor de fin de carrera, un detector de nivel, un detector
de temperatura, etc.
Una fuente de tensin de corriente alterna
Una interfaz de entrada del procesador del sistema de control de planta.
Cuando la variable fsica de campo alcanza el nivel de activacin, el transmisor cambia de
posicin y se cierra el circuito, La tensin de la fuente llega a la interfaz de entrada del
sistema de control y pasa por una etapa de filtrado y rectificacin, finalmente la seal
acondicionada excita un opto acoplador que transfiere la seal a los circuitos de lgica
interna del controlador a un nivel de tensin adecuado que puede ser ledo por los
microprocesadores del sistema de control.
Los opto acopladores son usados para aislar la circuitera interna de las tensiones de
alimentacin externas. Esto elimina la posibilidad de que cualquier voltaje daino o
cualquier ruido alcance los circuitos lgicos internos del PLC. Este tipo de transmisores
puede ser usado con corriente DC y con corriente AC.
ACTUADORES DISCRETOS
Para el control de actuadores discretos, el sistema de control utiliza interfaces de salida
que se comportan como como un interruptor de dos posiciones que puede ser
normalmente abierto o normalmente cerrado, la posicin del interruptor es controlada por
el procesador del sistema de control y representa la orden que se quiere transmitir hacia
el actuador en campo, que puede ser una vlvula solenoide de dos posiciones, un motor
elctrico, una bocina, una lmpara, etc. Estos elementos se conectan de la siguiente
manera:
Diagrama Esquemtico del Circuito para Una Salida Discreta
El procesador del controlador emite la orden de activacin/ desactivacin o encendido/
apagado del actuador en campo en forma de una corriente de base que polariza un
transistor ubicado en la interfaz de salida del controlador. La polarizacin de este
transistor permite que fluya corriente a travs de la bobina de un rel ubicando dentro de
la interfaz de salida del controlador, finalmente los contactos del rel abren o cierran de
acuerdo a la orden emitida por el procesador un circuito exterior formado por una fuente
de tensin y un segundo rel, cuyos contactos son capaces de controlar la carga elctrica
del actuador en campo.
COMPARACION INSTRUMENTACION DISCRETA DE CORRIENTE ALTERNA Y
CORRIENTE CONTINUA
Los voltajes DC usualmente son ms bajos (12 14 VDC) y es ms seguro operar con
ellos
Las entradas DC son muy rpidas. Las entradas AC atraviesan etapas de
acondicionamiento y requieren mayor tiempo para ser reconocidas
Las seales DC son sensibles a atenuaciones por resistencia en los conductores y ms
susceptibles al ruido, por eso se usan en distancias de transmisin cortas
Las seales de corriente alterna VAC son ms inmunes al ruido que las seales de
corriente continua VDC, por eso pueden cubrir mayores distancias y ambientes ruidosos
El suministro de AC es ms fcil de conseguir y menos costoso al momento de alimentar
equipos elctricos
INSTRUMENTACIN INDUSTRIAL ANALOGA
Definimos como variables anlogas de proceso a aquellas que pueden estar en uno de
infinitos estados dentro de un rango establecido.
La temperatura del agua es una variable analgica, porque puede estar en cualquier valor
entre 0 C y 100 C. La velocidad de un motor es una variable analgica porque puede
permanecer en infinitos valores dentro de los lmites de motor apagado y motor a mxima
velocidad. El porcentaje de apertura de una vlvula es tambin una variable analgica
porque puede ubicarse en uno de infinitos valores dentro de los lmites de vlvula
totalmente abierta y vlvula totalmente cerrada.
Los transmisores analgicos convierten una variable analgica de proceso en otra
variable analgica elctrica que puede ser transmitida hacia un procesador. El medio de
comunicacin ms usado a nivel industrial es el lazo de corriente de 4 20 mA.
Diagrama Esquemtico del Circuito de Lazo de Corriente
El transmisor se comporta como una fuente de corriente dependiente de la variable fsica
de proceso. El valor de la corriente es una funcin lineal de la variable fsica que se quiere
comunicar
Conversin de variable de proceso a corriente
La fuente de corriente del transmisor se conecta en serie con una fuente de alimentacin
de 24 VDC y el circuito se cierra con una resistencia de 250 ubicada dentro del
controlador
La variable de proceso regula la corriente que fluye en el circuito, esta corriente I atraviesa
la resistencia. La funcin de la resistencia es convertir el valor la corriente, que contiene la
informacin deseada, en un valor de tensin VDC que luego es digitalizada por un
conversor ADC (Anlogo a digital) y procesada por los circuitos basados en
microprocesador de los controladores.
Para transmitir rdenes a los actuadores analgicos, se utiliza el mismo circuito, con la
diferencia que el controlador regula la corriente del circuito en funcin a la orden que se
desea comunicar, el actuador tiene una interfaz de control que contiene la resistencia y la
circuitera lgica de conversin anloga a digital.
CARACTERISTICAS COMUNES DE LA INSTRUMENTACION DIGITAL ANALOGA Y
DIGITAL
- Para la comunicacin de una variable se necesita como mnimo un par de
alambres o hilos
- La comunicacin es siempre unidireccional
- Solo se puede transmitir el valor de una variable a travs de un par de hilos
Estas caractersticas constituyen desventajas en los entornos industriales actuales donde
se necesita disminuir el cableado y establecer comunicaciones bidireccionales entre la
instrumentacin de campo y los sistemas de control.
INSTRUMENTACION INDUSTRAL CON BUSES DE CAMPO
Las desventajas arriba mencionadas fueron superadas con la invencin de los buses de
campo. Los buses de campo nacen con la integracin de microprocesadores con
capacidades de comunicacin avanzada en los actuadores y transmisores.
La comunicacin entre el sistema de control y el instrumento de campo es bidireccional a
travs de un mismo medio de comunicacin.
Se transmiten mltiples variables, digitales y analgicas, a travs de un mismo medio de
comunicacin. Adems de la variable de proceso de inters, se comunican informaciones
de diagnstico y configuracin de parmetros del instrumento.
Los buses de comunicacin utilizan topologas de bus en sus comunicaciones es por esto
que reducen el cableado en las instalaciones industriales, de esta manera se tienen
menos puntos potenciales de falla y se reducen costos en instalacin de tuberas y
trabajos de construccin elctrica.
Describiremos el funcionamiento de los buses de campo usando como ejemplo la
necesidad de medicin de temperatura en diferentes zonas de un horno, las temperaturas
de inters estarn en el rango de 1000 a 1500 C.
Utilizaremos un transmisor de temperatura con capacidad de ocho entradas a termocupla
y con capacidades de comunicacin avanzada de bus de campo Foundation Fieldbus.
Cada termocupla es cableada en campo hasta el transmisor de temperatura, que
transmite digitalmente la medicin de temperatura de cada uno de los sensores hacia el
sistema de control de planta a travs de un mismo medio de comunicacin [Comunicacin
multi-variable].
Para que el sistema de medicin de temperatura funcione correctamente es necesario
configurar en el transmisor el tipo de termocupla que se est usando (J, K, N, etc.). Estos
parmetros de configuracin son transmitidos desde el sistema de control hacia el
transmisor de campo a travs del mismo medio de comunicaciones.
Adems nos interesa conocer la integridad del sistema de medicin de temperatura en
todo momento. Los buses de campo transmiten alertas de diagnstico de la integridad del
transmisor. Si alguna termocupla conectada al transmisor se daase, este dao ser
reconocido por la circuitera del transmisor y se reportara una alerta de termocupla
daada hacia el sistema de control, esta alerta ser recibida e interpretada por el personal
de mantenimiento de planta que realizar la correccin necesaria de una manera
eficiente.
REDES INDUSTRIALES DE CAMPO DIGITALES
Las redes industriales de campo conectan transmisores, actuadores y otros dispositivos
de entrada y salida I/O con un sistema de control de planta.
TIPOS DE REDES INDUSTRIALES DE CAMPO
Dependiendo del tipo de dispositivo que conectan y de la aplicacin para la cual fueron
diseados, Las redes industriales pueden agruparse en cuatro categoras
- Bus de Sensor
- Bus de Dispositivo
- Bus de Campo
- Ethernet Industrial
BUS DE SENSOR
Los buses de sensor son muy usados en procesos discretos de manufactura. Se usan con
interruptores de proximidad, botones, arrancadores de motor y dispositivos simples donde
solo se necesita transmitir unos cuantos bits.
Los buses de sensor estn diseados para manejar comunicaciones a nivel de bit en
aplicaciones de control simple, como por ejemplo, encender o apagar algo, o indicar un
estado de activacin o desactivacin.
AS-i, FIP-I/O son ejemplos de buses de sensor. Estos buses usualmente cubren
pequeas distancias usando dos o cuatro cables. Estas comunicaciones estn diseadas
para procesos de manufactura discreta pero tambin se les usa en aplicaciones
especficas en plantas de proceso continuo.
BUSES DE DISPOSITIVO
Los buses de dispositivo estn diseados para satisfacer necesidades de dispositivos
complejos, los mensajes que se transmiten en este tipo de redes pueden llegar hasta los
200 bytes, dependiendo del protocolo. Los buses de dispositivo pueden manejar ms
informacin que los buses de sensores, no solo unos cuantos bits de seales de
encendido o apagado. La comunicacin bidireccional permite configurar remotamente
parmetros de configuracin y variables del dispositivo, por ejemplo, un variador de
velocidad de un motor trifsico con bus de dispositivo transmite por el mismo medio de
comunicacin variables como la temperatura de operacin del dispositivo y recibe rdenes
del sistema de control para ajustar la velocidad del motor que controla.
DeviceNet y Profibus DP son ejemplos de buses de dispositivo que fueron diseados para
procesos de manufactura discreta pero han sido adaptados para su uso en plantas de
proceso.
Los buses de dispositivo usualmente utilizan cuatro cables como medio fsico de
comunicacin y se usan en variadores de velocidad de motores, pantallas de interfaz
hombre-mquina HMI, bloques de entrada/ salida remota, etc.
BUSES DE CAMPO
Este tipo de red de campo es el ms apropiado para las comunicaciones de control y de
diagnstico en entornos industriales y plantas de proceso continuo. Esto es porque los
buses de campo proveen comunicaciones bidireccionales muy confiables entre
instrumentos de campo inteligentes (con microprocesadores avanzados embebidos) y
sistemas de control en aplicaciones donde el determinismo es crtico. Los buses de
campo esta optimizados para transmitir mensajes que contienen el valor de ms de una
variable de punto flotante.
Los buses de campo pueden reemplazar la comunicacin analgica de 4 20 mA en
operaciones de proceso contino y pueden funcionar sobre el cableado existente en
planta.
Foundation Fieldbus y Profibus PA son dos ejemplos de buses de campo utilizados en la
industria del control de procesos
ETHERNET INDUSTRIAL
Ethernet es la red de comunicacin de datos dominante a nivel mundial en hogares y
oficinas, pero una planta industrial no es una oficina. La mayora de sistemas de
automatizacin son un conjunto de subsistemas, que incluyen controladores, interfaces de
operador y procesadores de aplicacin especfica. Estos subsistemas son conectados
usando redes Ethernet con extensiones que hacen posible su uso en un entorno
industrial.
Estas extensiones aaden redundancia a las comunicaciones, permiten un
comportamiento ms determinista de la red y hacen posible que los paquetes de Ethernet
lleven informacin de otros protocolos industriales de campo
Foundation Fieldbus HSE (High Speed Ethernet), Ethernet IP (Rockwell Automation),
ProfiNET (Siemens) son protocolos que adaptaron Ethernet a entornos industriales
ARQUITECTURA DE RED INDUSTRIAL
En una planta industrial se usan buses industriales de diferentes tipos para satisfacer
diferentes necesidades. Es muy comn que en una planta convivan diferentes tipos de
redes industriales.
Cada bus de campo que exista en la planta aumenta el nmero de herramientas, partes y
entrenamiento necesario. Se incrementa la complejidad de implementacin y
mantenimiento. Es por estas razones que existe una tendencia a simplificar la arquitectura
de redes en una planta industrial.
Un balance realista entre simplicidad y capacidad sugiere el uso de las siguientes redes
industriales en plantas nuevas o en expansiones de planta:
- Foundation Fieldbus H1: Para la comunicacin de instrumentacin de campo con
sistemas de control regulatorio y para las aplicaciones de control discreto
asociadas a estos sistemas.
- Un tipo de bus de campo de sensor o dispositivo para controlar motores y
maquinas elctricas como AS-i, Devicenet o Profibus DP
- Una red Ethernet como columna vertebral para comunicar los subsistemas que
integran el sistema de automatizacin de planta como Foundation Fieldbus HSE o
Ethernet IP
- Un Switch o Gateway para comunicar el sistema de control de planta con la red de
datos de la empresa.
Las plantas existentes pueden incluir otras redes para equipos, pero en general, es mejor
evitar comprar sistemas o equipos que requieren buses propietarios.
FOUNDATION FIELDBUS H1
Foundation Fieldbus H1 es un sistema de comunicaciones serial bidireccional que sirve
como la red de comunicaciones a nivel de campo en una planta industrial o una fabrica
DIBUJO FIELDBUS
Existen dos implementaciones de Foundation Fieldbus para satisfacer diferentes
necesidades en un ambiente de automatizacin de procesos. Estas dos
implementaciones usan diferentes medios fsicos y distintas velocidades de comunicacin:
- FOUNDATION FIELDBUS H1: Trabaja a 31.25 Kbits/sec y se usa para conectar
dispositivos de campo (transmisores y actuadores) con el sistema de control de
planta. Suministra comunicaciones y alimentacin elctrica a travs de un solo par
de cables trenzados. H1 es la implementacin ms comn en campo, por eso es el
centro de atencin de este informe
- FOUNDATION FIELDBUS HSE (High Speed Ethernet): Trabaja a 100Mbit/sec y
interconecta sub-sistemas de control de planta, gateways y dispositivos de campo
utilizando cableado Ethernet standard. Actualmente no suministra alimentacin
elctrica a travs del cable.
BENEFICIOS DE FOUNDATION FIELDBUS H1
Los instrumentos de campo tradicionales anlogos y discretos usan comunicaciones
punto a punto para comunicarse con el sistema de control, se utiliza, como mnimo, un par
de hilos por dispositivo para comunicar una sola informacin, que puede ser una variable
de proceso o una orden hacia un actuador.
Foundation Fieldbus elimina esas limitaciones y ofrece las siguientes mejoras sobre la
instrumentacin tradicional:
- Cableado Multipunto: Foundation Fieldbus H1 soporta hasta 32 dispositivos en un
solo par de hilos. En la prctica real, lo ms tpico es encontrar de 04 a 16
dispositivos por segmento Foundation Fieldbus H1. Si tenemos 1000 dispositivos
de campo necesitaramos 1000 pares de cables con la tecnologa tradicional.
Usando tecnologa Foundation Fieldbus para esos 1000 dispositivos solo
necesitaramos entre 60 a 250 pares de cables.
- Instrumentos multi-variables: El mismo par de cables puede manejar mltiples
variables provenientes de un dispositivo de campo. Por ejemplo, un transmisor de
temperatura podra comunicar las entradas de ocho sensores a travs del mismo
par de hilos.
- Comunicacin de dos vas: Con Foundation Fieldbus el flujo de informacin entre
el sistema de control y el dispositivo de campo ocurre en ambos sentidos. Por
ejemplo, una vlvula automtica puede aceptar una seal de control proveniente
del sistema de control de planta y por el mismo medio de comunicacin enviar la
posicin real de la vlvula. En un mundo analgico eso requerira otro par de
cables.
DIBUJO VALVULA
- Nuevos tipos de informacin: Los dispositivos analgicos y discretos tradicionales
no tienen manera de confirmar si estn operando correctamente, o si la
informacin de proceso que transmiten es vlida. Como consecuencia, los
tcnicos pasan mucho tiempo verificando la operacin del dispositivo.
Los dispositivos Foundation Fieldbus integran componentes electrnicos internos
de auto-diagnostico y le pueden decir al sistema de control si estn funcionando
correctamente, y si la informacin de proceso que estn enviando es buena, mala
o incierta. Esto elimina la necesidad de la mayora de revisiones de rutina y ayuda
a detectar condiciones de falla antes de que provoquen un problema mayor.
ESTNDAR FOUNDATION FIELDBUS
Foundation Fieldbus est respaldado por estndares de tres organizaciones importantes:
- ANSI/ISA 50.02
- IEC 61158
- CENELEC EN50170:1996/A1
La tecnologa es administrada por Fieldbus Foundation, que es una organizacin sin fines
de lucro integrada por representantes de los principales proveedores y usuarios de la
industria de automatizacin de procesos.
INTEROPERABILIDAD
Los dispositivos y sistemas de control son evaluados y certificados por Foundation
Fieldbus Los equipos certificados pueden proporcionar toda la funcionalidad de cada
componente, independientemente del fabricante.
Un dispositivo de un fabricante puede ser reemplazado por otro dispositivo similar de otro
fabricante sin perder caractersticas funcionales y sin necesitar trabajos de ingeniera
especiales.
CONTROL DE PROCESOS SEGURO Y EFICIENTE
Algunos protocolos de comunicacin que originalmente fueron diseados para
automatizar oficinas o fabricas han sido adaptados y aplicados exitosamente en plantas
de procesos industriales; pero ninguno de estos protocolos fue diseado para satisfacer
todos los requisitos del control de procesos.
Foundation Fieldbus H1 ha sido diseado especficamente para satisfacer las
necesidades de la industria del control control de proceos:
- Puede resistir los ambientes agresivos y peligrosos en plantas industriales
- Suministra energa elctrica y comunicaciones a travs del mismo par de cables
- Puede utilizar el cableado existente en planta
- Ofrece funciones de auto-diagnstico de dispositivo que pueden ser integradas en
los sistemas de supervisin de planta
En resumen Foundation Fieldbus est diseado para operar donde el proceso lo requiera
Foundation Fieldbus H1 hace posible el control de procesos determinstico, es decir, las
comunicaciones de los datos de control estn disponibles cuando se les necesita sin
retardos debido a otro trfico de datos en el bus. Si un mensaje no llega a su destinatario,
el protocolo hace todo lo posible para que el dato llegue hasta su destino final.
MODELO DE COMUNICACIONES FOUNDATION FIELDBUS H1
El modelo de comunicaciones Foundation Fieldbus H1 tiene tres capas
- Capa fsica
- Capa de enlace de datos
- Capa de aplicaciones y usuarios
DIBUJO DE CAPAS
Cada capa cumple funciones especficas que se deben realizar para que la informacin
pueda viajar a travs de la red Foundation Fieldbus desde el origen hasta el destino.
FUNCIONAMIENTO DEL MODELO DE COMUNICACIONES FOUNDATION FIELDBUS
Explicaremos como funciona cada capa y como la interaccin de las tres capas hacen
posible las comunicaciones entre dispositivos de campo Foundation Fieldbus y los
sistemas de control de planta usando como ejemplo la transmisin de informacin desde
un transmisor de temperatura en campo hacia un sistema host en sala de control
DIBUJO TRANSMISION DE DATOS
El transmisor digitaliza la temperatura medida por el sensor y esa informacin llega a la
capa de aplicacin.
La capa de aplicacin (software) define qu hacer con la temperatura, en este caso,
transmitirla al sistema host, este mensaje codifica la temperatura en una sucesin de 1s
y 0s. Esto es conocido como trama de datos. La trama de datos es enviada a la capa de
enlace de datos.
La capa de enlace de datos define cuando se debe transmitir el mensaje (mtodo de
acceso al medio). Adems define procedimientos para la entrega y recepcin de
mensajes. Al mensaje original se le agregan las direcciones de remitente y destino. Estos
procedimientos para el control de comunicaciones agregan informacin al mensaje
original en forma de 1s y 0s a la trama de datos, estos bits adicionales se conocen
como encabezados de capa de enlace de datos.
La capa fsica recibe la trama de datos de la capa de enlace y codifica el mensaje de 1s
y 0s en una seal elctrica transmisible a travs de un par de hilos. La capa fsica define
topologas, velocidades, medios de transmisin, cobertura de red y dems elementos
fsicos de la comunicacin.
El mensaje de 1s y 0s es codificado elctricamente y viaja a travs del medio de
comunicacin hasta llegar a su destino
En el destino ocurre el proceso inverso, la capa fsica recibe el mensaje y decodifica la
seal elctrica en informacin digital, 1s y 0s, que es enviada a la capa de enlace de
datos.
La capa de enlace de datos reconoce el mensaje como vlido quita los encabezados de
capa de enlace de datos y enva la informacin hacia la capa de aplicacin.
La capa de aplicacin recibe e interpreta el mensaje.
CAPA FISICA
La capa fsica de Foundation Fieldbus es un estndar internacional aprobado por la norma
IEC 1158-2: 1993 o ISA-S50.02.
Los requisitos de diseo de la especificacin Foundation Fieldbus H1 incluyen:
- Suministro de energa elctrica y transmisin de datos hacia dispositivos de campo
desde un solo par de cables.
- Dispositivos de campo de bajo consumo de potencia
- Topologa de bus, los dispositivos de campo se conectaran a un nico bus, que
consiste de un par de cables.
- Alcance mximo de 1900 metros sin repetidores y operacin en ambientes
elctricamente ruidosos.
- Reemplazar la instrumentacin existente de 4-20 mA sin cambiar el cableado de
las instalaciones.
La organizacin Foundation Fieldbus estableci que una seal codificada en cdigo
Manchester a 31.25 Kbit/s satisfaca todos los requisitos establecidos.
TOPOLOGIA DEL BUS FOUNDATION FIELDBUS H1
Dibujo Segmento Fieldbus
Un segmento Foundation Fieldbus est compuesto de:
- Una fuente de tensin DC desde 9 a 32 VDC conectada a un acondicionador de
potencia
- Una interfaz I/O Foundation Fieldbus H1 del sistema de control de planta
- Hasta 31 transmisores y actuadores de campo certificados por Foundation
Fieldbus
Todos estos equipos son conectados en paralelo a un mismo par de cables, denominado
Bus. Se conectan terminadores en los extremos del Bus.
CODIFICACION MANCHESTER BI-FASE L
La capa de enlace de datos enva a la capa fsica la informacin digital que se desea
transmitir codificada en una sucesin de 1s y 0s. La funcin de la capa fsica en
codificar estos mensajes en una seal elctrica transmisible a travs de un medio
cableado. En el extremo del receptor la funcin de la capa fsica es recibir estas seales
elctricas y decodificarlas o interpretarlas como 1s o 0s y enviar el mensaje recuperado
a la capa de enlace de datos
La codificacin Manchester bi-fase L es un mtodo de codificacin elctrica que se utiliza
para transmitir una seal binaria de manera serial,
Se utiliza una seal de reloj que consiste en una seal cuadrada de frecuencia constante.
El periodo de la seal de reloj se conoce como tiempo de bit
La informacin digital que se quiere transmitir tambin consiste de una seal cuadrada,
donde un 1 lgico mantiene la seal en nivel alto durante un tiempo de bit, y un 0 lgico
mantiene la seal de datos en nivel bajo durante un tiempo de bit.
La codificacin Manchester Bi-Fase L combina ambas seales en una sola, de esta
manera se transmite la informacin digital y la seal de reloj como una seal de voltaje a
travs de un solo par de hilos.
El transmisor muestrea la seal de datos en cada flanco de subida de la seal de reloj. La
seal codificada de Manchester se coloca al mismo nivel que la seal de datos y cuando
ocurra un flanco de bajada en la seal de reloj, la seal codificada Manchester cambiara
de nivel, es decir:
- Se interpreta un 0s lgico cuando ocurre una transicin positiva a la mitad de un
tiempo de bit
- Se interpreta un 1s lgico cuando ocurre una transicin negativa a la mitad de un
tiempo de bit
La capa fsica de Foundation Fieldbus agrega encabezados especiales al mensaje que se
quiere transmitir, estos son:
- Prembulo: Es usado por el receptor para sincronizar su reloj interno con la seal
Fieldbus entrante
- Indicador de Inicio y Fin de mensaje: El receptor acepta datos desde que detecta
el carcter de inicio hasta que detecta el indicador de fin de mensaje. Las seales
N+ y N- no cambian el nivel de tensin en la mitad del tiempo de bit.
Cuando el receptor detecta un prembulo seguido de un indicador de inicio de mensaje,
reconoce que se esta transmitiendo un mensaje valido. El mensaje es recibido hasta que
se detecte el indicador de fin, que seala el fin de un mensaje Foundation Fieldbus. De no
completar esta secuencia el receptor descarta el mensaje.
DATOS Y ALIMENTACION ELECTRICA POR EL MISMO PAR DE HILOS
Foundation Fieldbus suministra energa elctrica y transmisin de datos a travs de un
mismo par de hilos, esto se consigue porque la seal Manchester bi-fase L se modula
con el voltaje de la fuente DC conectada al bus. La fuente DC puede ser desde 9 a 32
VDC. Los dispositivos de campo conectados al bus Foundation Fieldbus deben consumir
como mximo 20mA. La seal Manchester de datos se transmite a 31.25 Kbyte/s a una
tensin de 1.0 Vpp modulada en la tensin VDC de la fuente de alimentacin.
FUENTE DE TENSION DC Y ACONDICIONADOR DE POTENCIA
La red de comunicaciones Foundation Fieldbus necesita requisitos de alimentacin de
energa elctrica nicos. Los dispositivos Foundation Fieldbus reciben el suministro de
energa a travs del cable de comunicaciones. La tabla muestra los requisitos de la fuente
de energa elctrica que alimenta un segmento Foundation Fieldbus:
Requisitos de la fuente de tensin
Tensin de salida 9 Vout 32 VDC
Impedancia de salida medida dentro de la frecuencia de 7.8 39 KHz 3 K
Si usamos una fuente de tensin DC ordinaria para suministrar energa elctrica al Bus
Foundation Fieldbus, la fuente absorbera la seal Manchester de datos que viaja
modulada en el cable porque las fuentes ordinarias DC tratan de mantener el voltaje DC
constante.
La fuente de tensin que alimenta un segmento Foundation Fieldbus H1 es acondicionada
a travs de un dispositivo conocido como adaptador de potencia, que consiste de un
circuito RL Serie conectado en serie a la fuente de alimentacin DC, el inductor se
comporta como un circuito abierto en el rango de frecuencias de 7.8 a 39 KHz, de esta
forma se asla la seal de datos Manchester de la fuente de tensin DC.
Cada segmento Foundation Fieldbus consume como mximo 400 mA, este dato es
importante a la hora de dimensionar la fuente de alimentacin DC
Por lo general, se usan fuentes de tensin DC monofsicas de 110 VAC/ 50 Hz de
entrada y 24 VDC/ 5A de salida suficiente para alimentar 08 segmentos Foundation
Fieldbus H1. Una prctica usual es utilizar fuentes de tensin DC redundantes, esto se
consigue conectando 02 fuentes de tensin DC a un dispositivo multiplexor de potencia.
Cuando la fuente primaria falla, el multiplexor de potencia conecta la fuente redndate al
bus.
Los dispositivos Acondicionadores de Potencia comerciales ms comunes son capaces
de alimentar 02 segmentos Foundation Fieldbus con proteccin contra cortocircuitos y
capacidad para conectar un terminador de red Foundation Fieldbus
TERMINADORES DE BUS
Se colocan terminadores en cada extremo del bus para acoplar la impedancia del cable y
minimizar las distorsiones por onda reflejada. La impedancia del cable Foundation
Fieldbus es 100. Los terminadores de red consisten de un circuito RC Serie conectado
en paralelo a los cables del bus donde R=100 y C= 5 F
DIBUJO DE FUENTES REDUNDANTES Y TERMINADORES DE BUS
TOPOLOGIAS DE RED
Foundation Fieldbus H1 establece una topologa lgica de bus, es decir, todos los
elementos que componen un segmento H1, fuentes de alimentacin, interfaz del sistema
de control, instrumentos de campo y terminadores, deben conectarse en paralelo a un par
de cables.
La topologa de bus ofrece flexibilidad a la hora de su implementacin en entornos
industriales.
TOPOLOGIA PUNTO A PUNTO
Esta topologa consiste de un segmento que solo tiene dos dispositivos conectados al
bus. Podra ser el caso de una tarjeta de interfaz del sistema de control de planta
conectada a un solo transmisor en campo. Esta topologa no es muy usada porque solo
tiene un transmisor o un actuador de campo por segmento, esta topologa no utiliza la
capacidad de multi-dispositivos por cada segmento H1
TOPOLOGIA DE BUS CON RAMALES
Con esta topologa los equipos Fieldbus H1 estn conectados al bus principal a travs de
un cable de longitud corta llamado Ramal. La longitud de un ramal puede ir desde 01
metro hasta 120 metros dependiendo de la cantidad de dispositivos conectados al
segmento y del tipo de cable utilizado. Un ramal con longitud menor a 01 metro es
llamado empalme.
Para conectar los ramales al bus principal se pueden usar cajas de paso con borneras
simples; pero lo ms usual es utilizar bloques especiales de conexin tipo T que ofrecen
proteccin contra cortocircuitos y capacidad para conectar un terminador al bus.
TOPOLOGIA DAYSY-CHAIN O EN CADENA
Con esta topologa, el cable troncal Fieldbus es tendido desde un dispositivo a otro. El
cable que llega a un equipo comparte el terminal de conexin con el cable que sale hacia
el siguiente equipo Fieldbus. Esta topologa no es recomendada por Fieldbus Foundation
porque la falla de un equipo en el bus provocara la falla de todo el segmento FF H1.
TOPOLOGIA DE ARBOL
Con esta topologa todos los equipos de campo son conectados a una caja de
conexiones a travs de ramales, luego un cable troncal conecta la caja de conexiones
con la interfaz Foundation Fieldbus H1 del sistema de control de planta en la sala
elctrica. Cuando se usa esta topologa es necesario considerar la longitud mxima que
puede tener un ramal y la cantidad de equipos que se pueden conectar al bus.
Para conectar las ramas del rbol a la troncal se puede usar una caja de paso con
borneras simples; pero lo ms usual es utilizar un bloque de conexin conocido como
Megablock, que ofrece proteccin contra corto circuitos y capacidad para conectar un
terminador de bus. Los Megablock comerciales tienen capacidad hasta para 12 ramales.
TOPOLOGIAS COMBINADAS
Se pueden combinar las topologas de bus con ramales con topologas de rbol para
facilitar la instalacin de un segmento FF H1 en cualquier entorno industrial. Para
asegurar comunicaciones exitosas en un segmento FF H1 es necesario respetar las
reglas de cableado que definen las caractersticas de los cables, la longitud mxima del
cable troncal, la longitud mxima de cada ramal, la cantidad mxima de dispositivos por
cada ramal y la ubicacin de donde se deben conectar los terminadores de red.
ESTANDAR FF-844
La norma FF-844 define todos los aspectos fsicos y elctricos del cableado en un
segmento de red Foundation Fieldbus H1. Un segmento que cumple con las
especificaciones de la norma puede ser auditado y certificado por Foundation Fieldbus.
TIPOS DE CABLE FOUNDATION FIELDBUS
La norma FF-844 define cuatro tipos de cable que se pueden utilizar para la
implementacin de un segmento FF H1:
CABLE TIPO A: Cable de par trenzado con blindaje para minimizar ruido electromagntico
inducido del exterior en los alambres.
CABLE TIPO B: Cable multi-par trenzado con un solo hilo de blindaje general.
CABLE C: Cable de par trenzado sin blindaje, es el cable utilizado para instrumentos de
4-20 mA. Se usa en aplicaciones de modernizacin de plantas, no se recomienda para
aplicaciones nuevas.
La siguiente tabla muestra las caractersticas importantes de los tipos de cable que se
pueden usar para implementar un segmento de red Foundation Fieldbus
Parmetro Unidad Tipo A Tipo B Tipo C
Impedancia Caracterstica Zo 100 20 100 20 **
Mxima resistencia DC /Km 22 56 132
Mxima atenuacin dB/Km 3.0 5.0 8.0
Calibre de alambre N.A. #18 AWG #22 AWG #26 AWG
Longitud Mxima m 1900 1200 400
** No especificado
La longitud mxima de la tabla son recomendaciones que incluyen un factor de seguridad
para minimizar problemas en las comunicaciones. La longitud mxima de un segmento
ser determinada por el tipo de cable, sus caractersticas, la topologa del segmento, la
cantidad y tipo de dispositivos de campo conectados al bus.
CABLE FOUNDATION FIELDBUS TIPO A
Define las caractersticas que debe tener el cable par trenzado que es certificado por
Foundation Fieldbus.
- Impedancia caractersticas Zo : 100 20
- Atenuacin : -3 db/Km a 39 KHz
- Calibre de alambre : 18 AWG para troncales y 22 AWG para ramales
- Blindaje : Cada par trenzado debe tener un blindaje individual
- Capacitancia Alambre-Alambre : Minimo 12 pF/m
- Resistencia del aislante : 1 M/ 330 m entre el blindaje de cable y el par trenzado
La norma no define aspectos del cable como los colores o caractersticas especiales, pero
estos aspectos deben considerarse en la implementacin de proyectos, estos incluyen:
- Proteccin contra rayos ultravioletas UV en aplicaciones donde el cable estar
expuesto a la luz del sol.
- En general debe considerarse que el cable debe ser el adecuado para el ambiente
donde ser instalado, por ejemplo, cable resistente a fluidos abrasivos, resistente
a chispas de soldadura, ambientes cidos y capacidad para ser enterrado si fuese
necesario.
LONGITUD MAXIMA DE UN SEGMENTO FOUNDATION FIELDBUS
La norma FF-841 define el criterio de aceptacin para la longitud mxima de un segmento
de red FF H1 cuando se utilizan diferentes tipos de cables segn la frmula:
Donde:
: Longitud del cable tipo A en el segmento
: Longitud del cable tipo B en el segmento
: Longitud del cable tipo C en el segmento
: Longitud mxima del cable tipo A segn tabla XXX
: Longitud mxima del cable tipo B segn tabla XXX
: Longitud mxima del cable tipo C segn tabla XXX
LONGITUD MAXIMA DEL CABLE TRONCAL EN UN SEGMENTO FF H1
Un segmento FF H1 consiste de:.
- Longitud de cable trocal: La troncal es el cable ms largo entre dos dispositivos.
- Longitud de ramal: Un ramal puede medir desde 01 metro hasta 120 metros, un
ramal que mide menos de 01 metro es considerado un empalme.
- Longitud total de cable: Es la suma de la longitud del cable troncal y los ramales
La normal FF-844 limita la longitud mxima del cable troncal segn la frmula:
Donde:
: Longitud mxima del cable troncal en metros (m)
: Voltaje de la fuente DC en voltios (V)
: Voltaje mnimo ms alto de todos los dispositivos en voltios (V)
: Corriente que consume el dispositivo con el voltaje minimo mas alto en mA
: Resistencia especificada por el fabricante del cable del ramal (/Km)
: Longitud del cable del ramal ms largo en metros (m).
: Sumatoria del consumo de corriente de todos los dispositivos conectados al bus en
mA.
: Resistencia especificada por el fabricante del cable troncal.
La norma FF-844 define la longitud mxima de ramal en funcin al nmero de dispositivos
conectados por ramal y a la cantidad total de dispositivos conectados al segmento FF H1
segn la siguiente tabla:
Total de
dispositivos
Longitud mxima de ramal en funcin al total de equipos
conectados por cada ramal
Longitud
total mxima
en el
segmento
FF H1
Un
dispositivo
por ramal
Dos
dispositivos
por ramal
Tres
dispositivos
por ramal
Cuatro
dispositivos
por ramal
de todos los
ramales
1 12 120 90 60 30 439
13 14 90 60 30 1 384
15 18 60 30 1 1 329
19 24 30 1 1 1 220
25 32 1 1 1 1 10
Si la instalacin de la red FF H1 tiene una topologa tipo rbol, o si cada dispositivo de
campo tiene diferente voltaje mnimo y diferentes consumos de corriente, entonces el
voltaje disponible en cada dispositivo conectado al bus ser calculado usando la
siguiente formula
Donde:
: Voltaje mnimo ms alto de todos los dispositivos en voltios (V)
: Voltaje DC en los terminales de cada dispositivo de campo en voltios (V)
: Voltaje de la fuente DC en voltios (V)
: Sumatoria del consumo de corriente de todos los dispositivos conectados al bus en
mA.
: Resistencia especificada por el fabricante del cable troncal.
: Longitud del cable troncal en metros (m)
: Corriente que consume el dispositivo con el voltaje minimo mas alto en mA
: Resistencia especificada por el fabricante del cable del ramal (/Km)
: Longitud del cable del ramal ms largo en metros (m).
La norma FF-844 tambin restringe la capacitancia del cable porque la capacitancia
sobre la seal en un ramal tiene el efecto de atenuar la seal digital. La capacitancia total
de un segmento FF H1 se calcula con la frmula:
)
Donde:
: Capacitancia total de la red en nF
: Longitud del cable del ramal en metros (m).
: Capacitancia del cable de ramal en nF/m, usar 0.15 si esta informacin no esta
disponible.
: Capacitancia del dispositivo
La atenuacin asociada con esta capacitancia es 0.035 dB/nF. Para estimar la atenuacin
asociada al segmento FF H1, la norma FF-844 establece la siguiente restriccin:
Donde:
: Atenuacin total en el segmento FF H1
: Capacitancia total de la red en nF
: Longitud del cable troncal en metros (m)
La atenuacin de los cables depende de la frecuencia. La frecuencia de inters del cable
tipo A Foundation Fieldbus es 39 KHz. El cable tipo A Foundation Fieldbus tiene una
atenuacin de 3 dB/Km a 39 KHz, esto significa que la seal se reducir a su 70 %
despus de 1 Km de recorrido. Si se usan cables ms cortos, la atenuacin ser menor.
Por ejemplo, para un cable de 500 metros la atenuacin ser de 1.5 dB.
NIVEL DE TENSION DE LAS SEALES FONDATION FIELDBUS H1
Un transmisor Foundation Fieldbus H1 genera una seal Manchester como minimo de
0.75 Vpp. Un receptor Foundation Fieldbus H1 puede detectar seales como minimo de
0.15 Vpp.
UBICACIN DE LOS TERMINADORES DE RED
Los terminadores de red consisten de un circuito RC Serie conectado en paralelo en cada
extremo del bus. La funcin de los terminadores es acoplar la impedancia caracterstica
de lnea para minimizar los efectos de interferencia por onda reflejada. La norma FF-844
establece que los terminadores deben ser ubicados en los extremos del cable troncal
independientemente de la topologa del segmento FF H1
PROTECCION DEL SEGMENTO FOUNDATION FIELDBUS H1
Todos los dispositivos que integran un segmento de red FF H1 se conectan en paralelo,
Si se produjera alguna falla de tipo corto circuito en alguno de los dispositivos de campo o
en la tarjeta de interfaz del sistema de control, todo el segmento de red colapsara. Es por
esta razn que todos los dispositivos conectados al bus deben ser aislados en caso de
falla.
La manera ms simple de aislar un dispositivo en caso de falla por cortocircuito es usando
fusibles. El problema con los fusibles es que su proteccin es solo de una vida y
requieren reemplazo manual.
Actualmente existen bloques de conexin tipo T para topologas tipo Bus con ramales
y bloques de conexin para hasta 12 ramales para topologas tipo rbol. Estos bloques
de conexin integran circuitos electrnicos de proteccin contra corto circuitos. De esta
manera la falla de un dispositivo no afecta a los dems dispositivos conectados al bus y
se mantienen perfectas las dems comunicaciones digitales.
ATERRAMIENTO EN UN SEGMENTO FOUNDATION FIELDBUS H1
Un aterramiento correcto es crtico para el xito de cualquier proyecto de instrumentacin
y control. Un aterramiento inadecuado es una causa comn de degradacin y/o falla de la
seal digital de comunicaciones.
Un entorno industrial tiene generadores de ruido elctrico en componentes elctricos tales
como motores de alta potencia, variadores de velocidad de motores, mquinas de soldar y
hornos elctricos. Los niveles de ruido elctrico generados por estos equipos son ms
altos que los niveles de voltaje usados por la mayora de protocolos de comunicacin
digital. En general, los sistemas de aterramiento son escalados para que todos esos
voltajes de ruido inducidos y sus componentes de frecuencia sean drenados a tierra.
EL mtodo preferido para aterrar sistemas de instrumentacin y control, incluyendo a
Foundation Fieldbus, es tener un nico punto de conexin a tierra en el gabinete elctrico
del sistema de control de planta.
El alambre de blindaje shield de un cable Foundation Fieldbus se conecta en todos los
dispositivos Foundation Fieldbus y se conecta a tierra en un nico punto en la sala
elctrica.
CAPA DE ENLACE DE DATOS
La capa de enlace de datos Foundation Fieldbus est definida en la especificacin ISA
S50.02 part 3/4. La norma define el trmino Nodo para identificar un dispositivo
conectado a un segmento FF H1
La capa de enlace de datos define todos los aspectos relativos a la transferencia de
mensajes como control de acceso al medio compartido, prioridad de los mensajes,
direccionamiento y programacin de las comunicaciones.
CONTROL DE ACCESO AL MEDIO COMPARTIDO
La funcin ms importante de la capa de enlace de datos es el control de acceso al medio
compartido (MAC: MEDIUM ACCESS CONTROL).
En un segmento FF H1 Todos los nodos comparten el mismo medio fsico de
comunicacin y reciben la misma seal Manchester de Datos, solo un nodo puede
transmitir datos en el bus en un instante dado, si dos nodos transmitieran sus mensajes a
la vez se produciran colisiones.
El control de acceso al medio MAC define los mtodos que garantizan la transmisin de
mensajes sin colisiones.
Las comunicaciones en un enlace FF H1 son coordinadas por el Coordinador de Enlace
Activo LAS: LINK ACTIVE SCHEDULER
La funcin del coordinador LAS es controlar el orden en que los nodos transmiten sus
mensajes en el medio de comunicacin compartido. El derecho de enviar datos en el bus
es denominado turno o TOKEN. El LAS posee el derecho de transmitir datos y lo cede
temporalmente a otro nodo para que este pueda transmitir su informacin en el medio
compartido.
Cuando el nodo termina de transmitir los datos en el bus devuelve el turno TOKEN al
coordinador LAS. El coordinador LAS cede el turno al siguiente dispositivo que tenga que
transmitir datos y as sucesivamente hasta que el turno para transmitir informacin haya
pasado por todos los nodos conectados al segmento FF H1. Este proceso se repite
indefinidamente.
CLASES DE DISPOSITIVOS FOUNDATION FIELDBUS
La capa de enlace de datos clasifica todos los dispositivos en dos grupos:
- Dispositivos clase LINK MASTER: Son los dispositivos cuyos circuitos electrnicos
estn diseados para funcionar como coordinador de enlace LAS, las tarjetas de
interface de los sistemas de control pertenecen a esta clase, en la instrumentacin
de campo esta caracterstica es opcional al momento de la compra.
- Dispositivos clase BASIC: Son aquellos cuyos circuitos no fueron diseados para
funcionar como coordinador de enlace LAS
ASIGNACION DEL COORDINADOR DE ENLACE ACTIVO - LAS
En un segmento FF H1 se pueden conectar varios nodos clase LINK MASTER; pero solo
uno de ellos puede asumir la funcin de coordinador LAS en un segmento FF H1.
La funcin de coordinador LAS se asigna al dispositivo que tenga la direccin vlida ms
baja. Si el coordinador LAS falla, es desconectado o se apaga entonces el siguiente nodo
con la direccin vlida ms baja asume la funcin de coordinador LAS.
DIRECCIONAMIENTO
Todos los nodos conectados al bus comparten el mismo medio fsico de comunicacin.
Cuando un dispositivo transmite informacin al medio, todos los dems dispositivos
escuchan esta informacin, pero solo el destinatario recibe y procesa el mensaje, los
dems dispositivos lo descartan.
Se hace necesario definir un mecanismo para identificar cada dispositivo, para que de
esta manera los mensajes lleguen a su destino. Esto se hace posible gracias al
direccionamiento. Cada dispositivo conectado al bus tiene una direccin que lo identifica,
la direccin es un nmero comprendido entre 0 y 255.
Cuando se transmite un mensaje, la capa de enlace datos agrega al mensaje
encabezados que contienen la direccin del nodo remitente y la direccin de nodo
destino. De esta manera, cuando un dispositivo transmite un mensaje al bus, todos los
dems reciben el mensaje; pero solo aquel cuya direccin sea igual a la direccin de
destino del mensaje recibir y procesara el mensaje, los dems lo descartaran.
El direccionamiento tambin define el orden en que los nodos conectados al bus tienen
derecho a transmitir mensajes en el bus de datos, es decir, define la secuencia en que el
LAS ceder el Token a los nodos. El derecho a transmitir mensajes en el bus es cedido
primero al nodo con la direccin ms baja y luego es cedido al nodo con la direccin
inmediata superior
Cada nodo deber tener una direccin nica en el segmento, caso contrario, se
presentaran fallas en las comunicaciones.
Las direcciones de los nodos se pueden asignar manualmente; pero lo ms usual es dejar
que las direcciones sean asignadas automticamente por el sistema de control durante la
configuracin del segmento.
El rango total de direcciones (0 hasta 255) se ha dividido en rangos en funcin a las
caractersticas de los dispositivos.
- La direccin 004 est separada para el coordinador de comunicaciones LAS
- El rango de direcciones desde 000 hasta 003 est prohibido.
- El rango de direcciones desde 005 hasta 015 est prohibido.
- El rango de direcciones desde 16 hasta V(FUN) est separado para todos los
nodos clase LINK MASTER.
Ejemplo: En un segmento FF H1 se conectan 08 nodos clase LINK MASTER, solo
uno de ellos se convertir en coordinador LAS y quedaran 07 nodos clase LINK
MASTER. La direccin ms alta que pueden tener estos nodos ser:
() ()
()
En este ejemplo las direcciones desde 016 hasta 023 seran asignadas a los nodos
clase LINK MASTER conectados al segmento FF H1.
Si se agregan nuevos nodos clase LINK MASTER el rango V(FUN) crece y se le
asigna al nodo una direccin vlida
- El rango de direcciones desde V(FUN) hasta V(FUN) + V(NUN) est prohibido. Si
un dispositivo tiene su direccin dentro de este rango, jams podr conectarse a
un segmento FF H1.
- El rango de direcciones desde V(FUN) + V(NUN) hasta 247 est reservado para
nodos de clase BASIC.
- El numero V(NUN) se calcula en funcin a la cantidad de dispositivos clase
BASIC.
Ejemplo: En un enlace FF H1 existen 08 dispositivos clase BASIC, entonces:
() ()
Para este enlace FF H1 el rango de direcciones para dispositivos clase BASIC
ser desde 240 hasta 247.
Este rango de direcciones es dinmico, cuando se agregan nodos a la red, se le
asigna una direccin clase BASIC y el rango crece
- El rango de direcciones desde 247 hasta 253 est reservado para instrumentos de
campo sin direccin. Cuando se vayan a integrar equipos nuevos al bus, debemos
asegurarnos que tengan configurada una direccin entre 247 y 253, cuando el
coordinador LAS detecta un nodo con esta direccin automticamente le asigna
una direccin en el rango vlido.
- El rango de direcciones desde 253 hasta 255 est reservado para equipos
temporales como configuradores de equipos, calibradores y analizadores de red.
TABLA DE NODOS VIVOS
El coordinador LAS tiene la funcin de mantener el enlace. El LAS cede el derecho o
TOKEN para transmitir datos a todos los nodos de red uno por uno. Para cumplir con esta
funcin el coordinador LAS tiene una tabla donde guarda las direcciones de los nodos
conectados a la red FF H1, esta tabla recibe el nombre de Lista de Nodos Vivos o LIVE
LIST en ingls.
AGREGANDO NUEVOS NODOS AL SEGMENTO FF H1
Cuando se agrega un nuevo nodo al segmento FF H1, este debe ser reconocido y
aadido a la lista de nodos vivos LIVE LIST.
EL coordinador LAS enva peridicamente Mensajes de Descubrimiento (PROBE NODE -
PN). Cuando un nodo con direccin entre 248 y 252 (nodos sin direccin) recibe un
mensaje de descubrimiento responde con un Mensaje Respuesta (PROBE RESPONSE -
PR) hacia el coordinador LAS.
El coordinador LAS recibe el Mensaje Respuesta PR y agrega el nodo a la Lista de Nodos
Vivos LIVE LIST.
QUITANDO NODOS DEL SEGMENTO FF H1
Cuando un nodo es removido del segmento FF H1, el nodo ya no responde a los
Mensajes de Descubrimiento PN. El coordinador LAS detecta esta situacin y elimina el
nodo de la Lista de Nodos Vivos LIVE LIST.
MANTENIMIENTO DE LA LISTA DE NODOS VIVOS
Cuando el coordinador LAS realiza cambios en la Lista de Nodos Vivos, el coordinador
LAS publica el cambio hacia todos los nodos de la red clase LINK MASTER, de esta esta
manera todos los nodos clase LINK MASTER tienen la ltima versin de la Tabla de
Nodos Vivos LIVE LIST y estn listos para asumir la funcin de coordinador LAS.
PRIORIDAD DE LOS MENSAJES FOUNDATION FIELDBUS
Los mensajes Foundation Fieldbus tienen varios niveles de urgencia de comunicacin. La
capa de enlace de datos incluye mecanismos para transmitir datos en funcin de la
urgencia de transmisin del mensaje.
Existen tres niveles de prioridad o urgencia de transmisin de mensajes FF H1: URGENT,
NORMAL Y TIME_AVAILABLE en ese orden. Un mensaje URGENT es transmitido
inmediatamente inclusive si otro mensaje NORMAL o TIME_AVAILABLE estn en lista de
esperar. El tamao mximo de los mensajes se muestra en la tabla:
Prioridad Tamao Mximo Del Mensaje
URGENT 64 Bytes
NORMAL 128 Bytes
TIME_AVAILABLE 256 Bytes
Tamao mximo de mensaje en funcin a cada prioridad
COMUNICACIONES PROGRAMADAS
El Coordinador de Enlace Activo es encargado de programar la transmisin de mensajes
programados de manera sncrona y repetitiva para asegurar el determinismo en los
sistemas de control. Los mensajes que tienen que enviarse cclicamente son las variables
de proceso y las ordenes a los actuadores.
El dispositivo que transmite datos programados es llamado Publicador PUBLISHER, el
dispositivo que recibe mensajes programados es llamado Subscriptor SUBSCRIBER.
El Coordinador de enlace LAS controla la transferencia peridica de mensajes desde el
Publicador.
Cuando es tiempo de realizar una Comunicacin Programada. El coordinador LAS cede el
turno TOKEN hacia el Publicador - PUBLISER enviando el mensaje de Reunir Datos
COMPEL DATA (CD) hacia el PUBLISER.
El Publicador recibe el mensaje REUNIR DATOS CD y reconoce que es su turno de
enviar mensajes en el bus FF H1 y responde enviando los datos que tiene que enviar
como un mensaje Transferencia de datos DATA TRANSFER (DT).
Todos los nodos reciben el mensaje DATA TRANSFER, en este mensaje se incluye la
direccin del nodo destino. El nodo destino reconoce el mensaje y lo procesa.
El coordinador LAS tambin recibe el mensaje DATA TRANSFER e interpreta que el
PUBLISER termino de transmitir su mensaje. El coordinador de enlace LAS transfiere el
turno para enviar mensajes en el bus al nodo con la direccin inmediata superior.
Cuando todos los nodos conectados al segmento FF H1 han transmitido sus mensajes
programados, el coordinador LAS espera un tiempo hasta iniciar otra rueda de
comunicaciones programadas. Este tiempo libre se usa para que los nodos tengan
oportunidad de transmitir mensajes no programados.
COMUNICACIONES NO PROGRAMADAS
Otra informacin que no es crtica para el control, como parmetros de configuracin y
diagnstico, se transmiten de manera asncrona, no ocurren peridicamente.
El coordinador LAS da la oportunidad a todos los nodos para que transmitan mensajes no
programados en el tiempo libre que queda entre una rueda de comunicaciones
programadas y la siguiente.
El coordinador LAS cede el turno de transmitir mensajes no programados a cada nodo
con un mensaje PASS TOKEN (PT).
El mensaje PASS TOKEN contiene informacin de prioridad de mensaje e intervalo de
tiempo. El nodo recibe el PASS TOKEN y lo conserva durante el tiempo especificado,
durante este tiempo el nodo verifica si tiene mensajes no programados de la prioridad
solicitada y los enva, caso contrario el PASS TOKEN expira y el nodo devuelve el turno al
coordinador LAS con un mensaje RETURN TOKEN.
El coordinador LAS verifica si todava queda tiempo libre para otra comunicacin
asncrona. Si todava queda tiempo entonces el coordinador LAS cede el turno de
transmitir mensajes no programados al siguiente nodo.
Si no queda tiempo se esperara hasta el siguiente tiempo libre para seguir transmitiendo
mensajes no programados.
MACROCICLO
Es el tiempo que duran las comunicaciones programadas y las no programadas de todos
los nodos. Es el tiempo q demora el TOKEN en pasar por todos los nodos conectados al
segmento FF H1.
Al inicio de un MACROCICLO todos los nodos transmiten todos sus mensajes
programados, luego se da un tiempo libre para que todos los nodos tengan la oportunidad
de transmitir mensajes no programados, despus el coordinador LAS inicia otro
MACROCICLO.
La duracin de un MACROCICLO es directamente proporcional a la cantidad de nodos
que estn conectados a la red FF H1.
TIEMPO DE ROTACION OBJETIVO
El Tiempo de Rotacin Objetivo es el tiempo de MACROCICLO deseado. Este tiempo es
un parmetro de red configurable. Si se desea reducir la duracin de un MACROCICLO el
coordinador LAS reduce el tiempo libre para comunicaciones no programadas, en
consecuencia, se reduce la velocidad de transferencia de mensajes no programados.
El tiempo de Rotacin Objetivo se define en funcin al proceso que se est controlando.
Por ejemplo, en procesos de control de temperatura se pueden aceptar tiempos de
MACROCICLOS altos porque el control de temperatura es un proceso lento. Algunos
procesos de variables rpidas exigen un Tiempo de Rotacion Objetivo pequeo, esto
restringe la cantidad de nodos que se pueden conectar a un enlace FF H1.
CAPA DE APLICACIN
La capa de aplicacin define la menara de como acceder y usar la informacin que
proporciona un dispositivo Fieldbus, de ta manera que esta informacin pueda se
transmitida como mensajes a otros dispositivos o noodos en un segmento de red
Foundation Feldbus H1
Los mensajes que los nodos envan y reciben pueden ser variables de proceso, como
temperatura y presin, pueden ser parmetros de configuracin del dispositivo y alertas
de diagnstico de la integridad del dispositivo.
La capa de aplicacin enva los mensajes de la aplicacin del dispositivo hacia la capa de
enlace de datos, que se encarga de coordinar la transferencia de mensajes.
ARCHIVOS DEVICE DESCRIPTOR DD
En un entorno industrial todos los dispositivos que integran un segmento de red FF H1 se
conectan en paralelo a una tarjeta I/O de interfaz Foundation Fieldbus del Sistema de
Control de Planta.
El Sistema de Control de planta en un segmento FF H1 se encarga de:
- Configurar las direcciones de nuevos dispositivos que sean agregados a un
segmento de red FF H1.
- Configurar todos los parmetros de red para que las comunicaciones se realicen
sin interrupciones
- Enviar y recibir mensajes de variables de proceso hacia la instrumentacin de
campo.
- Configurar parmetros de funcionamiento de la instrumentacin de campo desde
sala de control
- Enviar y recibir mensajes relativos a la salud de los dispositivos de campo
Para llevar a cabo todas estas funciones, es necesario que el Sistema de Control tenga
en su base de datos el archivo DEVICE DESCRIPTOR DD de todos los dispositivos
Foundation Fieldbus que tenga conectados.
El archivo DEVICE DESCRIPTOR est escrito en cdigo DDL (Device Descriptor
Languaje) y define todas las funciones y capacidades de comunicacin Fieldbus del
dispositivo.
Se puede hacer una analoga con los archivos Driver para instalar una impresora en una
PC. Primero necesitamos instalar los drivers en el sistema operativo, luego la
computadora reconocer la impresora y recin podremos imprimir nuestros documentos.
Lo mismo sucede con los archivos DD, primer tenemos que cargar el archivo DD del
dispositivo en la base de datos del sistema de contro, luego el sistema de control
reconocer el dispositivo Fieldbus y recin podr enviar y recibir mensajes en un
segmento FF H1.
INSTALAR ARCHIVO DD INSTALAR DRIVER DE IMPRESORA
1. Conseguir el archivo DD adecuado
para el equipo Fieldbus
1. Conseguir los drivers correctos para
el modelo de impresora
2. Instalar archivos DD en la base de
datos del sistema de control
2. Instalar driver en el sistema operativo
3. Sistema de Control reconoce el equipo
Fieldbus
3. El sistema operativo reconoce la
impresora conectada
4. El equipo Fieldbus ya puede enviar y
recibir mensajes del sistema de control
4. Ya se pueden imprimir documentos
Las empresas fabricantes de dispositivos Foundation Fieldbus tienen que crear un archivo
DD DEVICE DESCRIPTOR por cada diferente tipo de producto que pongan en el
mercado.
Este archivo es evaluado por Foundation Fieldbus. Los criterios de evaluacin incluyen
compatibilidad con diferentes sistemas de control y cumplimiento de exigencias mnimas
para recibir la aprobacin de Foundation Fieldbus.
El archivo DD para un instrumento especfico se puede conseguir de diferentes maneras:
- Viene grabado en un CD cuando se compra un instrumento FF nuevo
- Se puede descargar de la pagina web www.fieldbus.org
- Se puede descargar de la pagina web del fabricante del instrumento
- Se puede descargar de la pagina web del fabricante del sistema de control
Lo ms recomendable es descargar el archivo DD de la pagina web del fabricante del
sistema de control porque esto asegura que el archivo DD fue probado y es compatible
con el sistema de control.
El DD es un archivo comprimido en formato .zip que incluye tres archivos: Uno en formato
.ffo, otro en formato .sym y otro en formato .cff. Al momento de descargar el archivo DD
debemos asegurarnos que las tres partes estn completas.
Puede existir ms de un archivo DD para un mismo instrumento: Los fabricantes de
instrumentacin constantemente mejoran las prestaciones de sus equipos sin alterar el
hardware. Estas mejoras se consiguen modificando y emitiendo nuevas versiones del
archivo DD.
Por ejemplo: Para el transmisor de temperatura Rosemount 848T Rev. 1 existen dos
versiones del archivo DD, una del ao 2007 y otra del ao 2008. Se debe actualizar la
versin del archivo DD en la base de datos del Sistema de Control.
Dispositivo Foundation Fieldbus Versin del archivo DD
Transmisor de temperatura Rosemount
848T
848T_REV_0.zip (Ao 2007)
848T_REV_1.zip (Ao 2008)
Se debe establecer la diferencia entre versin de archivo DD y revisin de dispositivo.
La revisin del dispositivo indica que el dispositivo es completamente diferente a nivel de
circuitos electrnicos con referencia a la revisin anterior. Se necesita el archivo DD
adecuado para cada versin de hardware de un mismo dispositivo
Por ejemplo: El transmisor de flujo Foxboro IMT25 Rev. 2 es completamente diferente al
transmisor Foxboro IMT25 Rev.1. Se cambi el microprocesador de una versin a otra.
Existe un archivo DD para el transmisor IMT25 Rev.1 y otro archivo DD para el transmisor
IMT25 Rev. 2.
Dispositivo Foundation Fieldbus Archivo DD Nota
Foxboro IMT25 Rev. 1 0102.zip Las versiones de DD son
incompatibles Foxboro IMT25 Rev. 2 0202.zip
ARQUITECTURA DE BLOQUES FUNCIONALES
La arquitectura de un dispositivo Foundation Fieldbus H1 est basada en bloques
funcionales. Cada bloque funcional es un objeto que tiene que realizar tareas especficas
como adquisicin de datos, configuracin del dispositivo y algoritmos de control. Para
realizar la tarea especfica cada bloque funcional ejecuta un conjunto de funciones.
Cada bloque funcional contiene un algoritmo, una base de datos de entradas/ salidas y un
nombre.
Los bloques funcionales Foundation Fieldbus son el modelo a travs del cual uno puedo
configurar, mantener y personalizar las aplicaciones de control automtico. El bloque
funcional es el concepto clave de la tecnologa Foundation Fieldbus.
CLASIFICACION DE LOS GRUPOS FUNCIONALES
Los bloques funcionales se agrupan en tres categoras:
- Bloque RESOURCE
- Bloque TRANSDUCER
- Bloques FUNCTION BLOCK
BLOQUE RESOURCE
El bloque RESOURCE (recurso) muestra informacin de identificacin del dispositivo
como fabricante, ao de fabricacin, modelo, versin del Hardware y revisin del archivo
DD necesario.
El bloque RESOURCE controla la totalidad del hardware del dispositivo y los dems
bloques de funcionales.
BLOQUE TRANSDUCER
EL bloque TRANSDUCE (transductor) es dependiente del hardware y del principio de
medicin de variable fsica y funcionamiento. Por ejemplo un transmisor de presin
absoluta y un flujometro electromagntico usan diferentes principios de medicin pero
ambos proporcionan un valor de medida analgico. La caracterstica que comparten
ambos equipos es modelada como un AI (Analog Input: Entrada analogica). La diferencia
es modelada por el bloque TRANSUDCER el cual proporciona la informacin necesitada
por el bloque AI ANALOG INPUT para realizar la medicin de variable fsica. El bloque
TRANSDUCER se comunica con el bloque AI ANALOG INPUT a travs del parmetro
CHANNEL del bloque AI.
El bloque TRANSDUCER define parmetros como:
- Rango calibrado de medicin del sensor
- Rango calibrado del actuador
- Definicin de tipo de sensor. Por ejemplo para un transmisor de temperatura se
puede escoger el tipo de sensor usado para la medicin (RTD, termocupla)
- Definicin de parmetros especficos para realizar la medicin. Por ejemplo, para
un transmisor de flujo magntico es necesario configurar la densidad y la
conductividad del fluido.
- Definicin de parmetros de actuador. Por ejemplo para un controlador de posicin
de vlvula se debe configurar el tipo de vlvula: globo, bola, etc.
Actualmente el bloque TRANSDUCER hace mucho ms que definir los parmetros
necesarios para realizar una medicin o una actuacin en campo. El bloque
TRANSDUCER se ha vuelto ms importante porque es usado para capturar y almacenar
toda la informacin relacionada con el diagnstico y el mantenimiento del dispositivo
Foundation Fieldbus.
Estas funciones adicionales de diagnstico y mantenimiento de los equipos Foundation
Fieldbus se han conseguido mejorando los microprocesadores y agregando sensores de
monitoreo de condicin en los equipos convirtindolos en instrumentos inteligentes
Foundation Fieldbus H1. Por ejemplo, los controladores de posicin de vlvula automtica
incluyen sensores de presin en el hardware interno del dispositivo que constantemente
monitorean la salud del dispositivo y generan alertas cuando se detecta alguna
degradacin en el rendimiento del equipo.
Foundation Fieldbus ha definido bloques TRANSDUCER estndar para transmisores de
temperatura, presin y controladores de posicin de vlvula automtica. Es decir todos los
transmisores de temperatura y presin Fieldbus tienen casi las mismas capacidades de
configuracin, diagnstico y mantenimiento independientemente del fabricante.
Para los dems equipos Foundation Fieldbus las especificaciones del bloque
TRANSDUCER son definidas por los fabricantes de instrumentacin. Algunos fabricantes
desarrollan capacidades avanzadas de diagnstico y mantenimiento predictivo mientras
que otros fabricantes solo ofrecen funcionalidades bsicas en sus equipos, este aspecto
debe considerarse como clave durante el proceso de seleccin de nuevos equipos en los
proyectos de instrumentacin industrial.
Las exigencias de eficiencia de los procesos actuales necesitan mxima disponibilidad de
los equipos utilizados para la produccin, es por ello que actualmente todas las empresas
se encuentran implementando y aplicando nuevos enfoques de mantenimiento. Se hace
necesario estandarizar los bloques TRANSDUCER porque sin estndares se hace una
tarea engorrosa usar todas las ventajas de las capacidades de diagnstico de la
instrumentacin inteligente Foundation Fieldbus H1.
En la actualidad existen programas y sistemas enfocados solo a la gestin de activos de
instrumentacin para poder aprovechar todas las capacidades de diagnstico de la
instrumentacin Foundation Fieldbus
BLOQUES DE FUNCIONES FUNCTION BLOCK
Es un modelo que representa la funcionalidad de los instrumentos de campo de medicin
y control tales como entradas/ salidas analgicas y bloques de control PID.
Cada dispositivo Foundation Fieldbus cuenta con bloques FUNCTION BLOCK especficos
Los bloques FUNCTION BLOCK de diferentes nodos de un segmento de red FF H1 se
pueden conectar para armar estrategias de control automtico de planta. Para ello se
usan programas de diseo de ingeniera de control como Control Studio de Emerson.
Foundation Fieldbus define tres clases de bloques de funcin:
- Bloques Estndar : Realizan funciones comunes y son definidos por Foundation
Fieldbus.
- Bloques Mejorados: Realizan las funciones de los bloques estndar pero con
algoritmos mejorados y son definidos por Foundation Fieldbus
- Bloques Vendor-Specific : Diseado por fabricantes y no son definidos por
Foundation Fieldbus pero se definen en el archivo DEVICE DESCRIPTOR DD
Todos los bloques de funcin Foundation Fieldbus son compatibles con el estandar IEC
1131-3 que define todas las normas para construir estrategias de control en lenguaje FBD
FUNCTION BLOCK DIAGRAM (Diagrama lgico de funciones). Este lenguaje es
compatible con controladores lgicos programables PLC y con sistemas de control
distribuido DCS.
A continuacin se describen los bloques de funcin Fieldbus ms usados:
PARAMETROS
Un bloque de funciones tiene una serie de parmetros definidos en tres clases:
- Parametros de salida OUTPUT
- Parametros de entrada INPUT
- Parametros internos CONTAINED
PARAMETROS DE SALIDA OUTPUT
Un parmetro de salida OUTPUT es la salida de un bloque de funciones y puede ser
conectado a un parmetro de entrada de otro bloque de funcin. Es posible que dos
nomas bloques de funcin tengan como entradas una salida de otro bloque de funcin
PARAMETROS DE ENTRADA
Un parmetro de entrada es una entrada de un bloque de funciones y se puede conectar
a la salida de otro bloque de funciones pero el tipo de datos debe ser el mismo
PARAMETROS INTERNOS CONTAINED
Un parmetro CONTAINED no es ni entrada ni salida, es accesible solo a travs de una
solicitud de lectura o escritura.
ATRIBUTOS DE LOS PARAMETROS
Los parmetros de los bloques tienen varios atributos
DERECHO DE ACCESO
Algunos parmetros de bloque se pueden leer y otros solo se pueden escribir o modificar.
Algunos parmetros que se pueden modificar tienen ciertas restricciones, por ejemplo,
solo se pueden modificar o escribir cuando el bloque esta en modo OUT OF SERVICE
(Fuera de Servicio).
DINAMICO O ESTATICO
Un parmetro dinmico vara cuando el bloque de funcin es ejecutado. Su valor se
pierde cuando se quita la energa elctrica.
Un parmetro esttico no vara cuando el bloque de funcin es ejecutado; pero su valor
puede ser modificado con una solicitud de escritura. Cuando se pierde la energa elctrica
su ltimo valor grabado se mantiene en memoria, estos parmetros se conocen como no
voltiles.
ESTATUS DE UN PARAMETRO
Los parmetros de entrada, salida e internos son acompaados de un indicador de
estado, que muestra si el valor del parmetro es vlido o no. Si el valor es vlido, el
estado del parmetro ser GOOD, si el valor es no vlido el estado del parmetro ser
BAD y si el bloque de funcin no est 100% seguro de la valides del dato el valor ser
UNCERTAIN. El bloque de funciones tiene una opcin para interpretar un parmetro
UNCERTAIN como GOOD o BAD.
MODOS DE FUNCIONAMIENTO DE UN BLOQUE
Todos los bloques tienen un modo de operacin expresado por el parmetro MODE_BLK.
El modo es un registro de cuatro componentes: TARGET, ACTUAL, PERMITTED y
NORMAL.
TARGET: es el modo de funcionamiento deseado en un instante, este componente se
puede modificar
ACTUAL: Muestra el modo de operacin actual y es de solo lectura, cuando se satisfacen
todas las condiciones necesarias, el modo de operacin ACTUAL es igual al modo de
operacin TARGET.
PERMITTED: muestra los modos permitidos para un bloque, se puede modificar
NORMAL: es un recordatorio para el operador del modo normal de funcionamiento de un
bloque en condicionales normales. Se puede modificar pero es aconsejable no modificar
este valor.
Los bloques de operacin pueden estar en diferentes estados:
- OUT OF SERVICE OOS (Fuera de Servicio): El Bloque no hace nada y su estatus se
pone en BAD
- MANUAL: El bloque no cambia sus parmetros de salida.
- AUTO: El bloque se ejecuta sin tomar en cuenta los parmetros de entrada de los bloques
conectados aguas arriba.
- CAS (Cascada) : El bloque de funcin lee las entradas de bloques conectados aguas
arriba.
Es importante acotar que para modificar los parmetros de configuracin el bloque
TRANSDUCER debe ser puesto en modo OOS Fuera de servicio y al terminar la
configuracin de parmetros debe ser puesto en modo AUTO. Estas configuraciones se
deben hacer con el proceso parado para evitar accidentes.
TEMPERATURA
La temperatura es una propiedad fsica, inherente y medible de la materia que nos rodea.
En el campo de la fsica la temperatura est directamente relacionada con la cantidad de
movimiento de las partculas / tomos que componen el cuerpo, objeto o materia, de tal
forma que a mayor cantidad de movimiento mayor temperatura y a menor cantidad de
movimiento menor temperatura tendr dicho cuerpo.
A modo de ejemplo un cubo de agua situado en el interior de una nevera alcanza
temperaturas inferiores a 0 C encontrndose el agua en un estado slido y frio
comnmente conocido como hielo, en dicho estado slido las molculas de H2O no
disponen de espacio para moverse por lo que la cantidad de movimiento se reduce y por
ello su temperatura es baja y fra. En cambio si el mismo cubo de agua lo calentsemos
observaramos que el agua abandonara su estado slido para pasar a un estado lquido
en donde las molculas de H2O disponen de ms espacio y libertad para moverse, como
consecuencia de dicho aumento de movimiento decimos que el agua ha aumentado su
temperatura.
INFLUENCIA DE LA TEMPERATURA EN LA MATERIA
La temperatura ejerce una enorme influencia sobre cualquier material y forma de vida que
se encuentre en nuestro universo.
La temperatura influye en diversas propiedades de los materiales como el acero, hierro,
plsticos, vidrios. Pudiendo variar su forma geomtrica mediante los fenmenos de
contraccin y dilatacin, variando propiedades fsicas como resistencia, conductividad
elctrica, color, solubilidad, viscosidad y densidad
La temperatura acta como un agente acelerador de todas la reacciones qumicas que
ocurren en la naturaleza, esta propiedad es utilizada en numerosos procesos industriales
para acortar el tiempo de reaccin, por ejemplo, utilizamos un aumento de la temperatura
para el secado y curado de pinturas, adhesivos y plsticos.
En los seres vivos un cambio de la temperatura interna es el primer sntoma o advertencia
de una enfermedad, por otro lado necesitamos unas condiciones de temperatura
adecuada para que pueda existir la vida tal y como la conocemos.
Incluso en los grandes cuerpos celestes de nuestro universo la temperatura ejerce una
enorme influencia, un cambio de temperatura en el interior de una estrella puede propiciar
un colapso gravitatorio de la misma crendose un agujero negro.
Fenmenos migratorios de las aves, cambios climticos, fusiones nucleares, planetas
habitables, formaciones de galaxias e incluso el Big Bang tienen en la temperatura una
explicacin del origen y funcionamiento de las mismas
ESCALAS TERMOMETRICAS
Você também pode gostar
- Economica Modelos de DecicionDocumento7 páginasEconomica Modelos de Decicionlancelotrj01Ainda não há avaliações
- Guia para La Resoluciã N Del Caso en Blanco v2.0Documento11 páginasGuia para La Resoluciã N Del Caso en Blanco v2.0juanpeAinda não há avaliações
- Cerro QuilishDocumento14 páginasCerro QuilishDieego BarriigaAinda não há avaliações
- AOE en el PerúDocumento12 páginasAOE en el PerúDieego BarriigaAinda não há avaliações
- Reflexiones de Los GerentesDocumento2 páginasReflexiones de Los GerentesDieego BarriigaAinda não há avaliações
- Trabajo Final REALIDAD EMPRESARIALDocumento20 páginasTrabajo Final REALIDAD EMPRESARIALDieego Barriiga100% (1)
- Te Ayudamos A Cuidar Tu SaludDocumento12 páginasTe Ayudamos A Cuidar Tu SaludDieego BarriigaAinda não há avaliações
- Caso Boeing 737 Max 8 - Análisis de Toma de DecisiónDocumento19 páginasCaso Boeing 737 Max 8 - Análisis de Toma de Decisiónjroblesluna100% (2)
- ESAN: Caso Manhattan Corp. en TambograndeDocumento14 páginasESAN: Caso Manhattan Corp. en TambograndeDieego BarriigaAinda não há avaliações
- Trabajo Individual Final - Diego BarrigaDocumento4 páginasTrabajo Individual Final - Diego BarrigaDieego BarriigaAinda não há avaliações
- Constancia preinscripción Maestría Ingeniería Electrónica UNSA 2013Documento1 páginaConstancia preinscripción Maestría Ingeniería Electrónica UNSA 2013Dieego BarriigaAinda não há avaliações
- CV - Diego BarrigaDocumento5 páginasCV - Diego BarrigaDieego BarriigaAinda não há avaliações
- Plan de Tesis Grupo 8Documento16 páginasPlan de Tesis Grupo 8Dieego BarriigaAinda não há avaliações
- Costos Finales Comp SERV PRDocumento5 páginasCostos Finales Comp SERV PRDieego BarriigaAinda não há avaliações
- 098 11 Cies2008Documento7 páginas098 11 Cies2008Dieego BarriigaAinda não há avaliações
- UntitledDocumento1 páginaUntitledDieego BarriigaAinda não há avaliações
- Cuadro Comparativo de Los Paradigm As de La InvestigacionDocumento1 páginaCuadro Comparativo de Los Paradigm As de La InvestigacionDieego BarriigaAinda não há avaliações
- Educacion de Calidad en El PeruDocumento11 páginasEducacion de Calidad en El PeruDieego BarriigaAinda não há avaliações
- Paradigma CognitivoDocumento1 páginaParadigma CognitivoDieego BarriigaAinda não há avaliações
- Curriculo VitaeDocumento1 páginaCurriculo VitaeDieego BarriigaAinda não há avaliações
- Diagrama de BloquesDocumento1 páginaDiagrama de BloquesDieego BarriigaAinda não há avaliações
- Notas Arquitectura de Computadoras 2010BDocumento1 páginaNotas Arquitectura de Computadoras 2010BDieego BarriigaAinda não há avaliações
- NUEVOPWMDocumento2 páginasNUEVOPWMDieego BarriigaAinda não há avaliações
- Notas Config - alarmaDSC 585Documento6 páginasNotas Config - alarmaDSC 585Cristhian ChamochumbiAinda não há avaliações
- TemContact contactores y relés térmicosDocumento66 páginasTemContact contactores y relés térmicosGustavo Mario Torres Santamaría0% (2)
- Paraninfo ElectrotecniaDocumento377 páginasParaninfo Electrotecniamanuel dominguez100% (6)
- CatálogoDocumento56 páginasCatálogoJuan Sánchez LópezAinda não há avaliações
- Mo TronicDocumento62 páginasMo TronicÁlvaro RevillaAinda não há avaliações
- Especificación Técnica RevA.-PEMEX 2021-060921Documento6 páginasEspecificación Técnica RevA.-PEMEX 2021-060921Fernando SanchezAinda não há avaliações
- 72696B-Manual Servicio Tecnico NATAL CAREDocumento92 páginas72696B-Manual Servicio Tecnico NATAL CAREAbraham Segovia Martinez100% (5)
- 083 Calefaccion EstacionariaDocumento28 páginas083 Calefaccion EstacionariaXaxy Merbuster100% (2)
- Curso Básico MCVDocumento28 páginasCurso Básico MCVMiguel Ivan Acosta MondragonAinda não há avaliações
- Plasma LG 50pt350 No EnciendeDocumento8 páginasPlasma LG 50pt350 No EnciendeTito MaldonadoAinda não há avaliações
- MEC 3333 Aplicación del método paso a paso en problemas de electroneumáticaDocumento4 páginasMEC 3333 Aplicación del método paso a paso en problemas de electroneumáticaMAURICIOAinda não há avaliações
- Diagrama de Fusibles Ford Serie E E-150Documento6 páginasDiagrama de Fusibles Ford Serie E E-150EDUARDo GILAinda não há avaliações
- Diseño y Control Con PLCDocumento80 páginasDiseño y Control Con PLCLeonardo González100% (1)
- Tipos de Enclavamientos y Motores ElectricosDocumento39 páginasTipos de Enclavamientos y Motores Electricoselliecer100% (1)
- Tema - Control de Circuitos y Electrónica ÍndiceDocumento12 páginasTema - Control de Circuitos y Electrónica ÍndicetonynoharaAinda não há avaliações
- INFORME ARRANQUES SECUENCIALES MOTORESDocumento13 páginasINFORME ARRANQUES SECUENCIALES MOTORESJhon MartinezAinda não há avaliações
- Rodríguez 130717Documento36 páginasRodríguez 130717JonathanRodriguezAjanelAinda não há avaliações
- Cierre CentralizadoDocumento5 páginasCierre CentralizadoJuan UruarteAinda não há avaliações
- El AlternadorDocumento36 páginasEl AlternadorluisitolokitodAinda não há avaliações
- Ajustes de sensores y motores del ADFDocumento495 páginasAjustes de sensores y motores del ADFCarlitos Pancorbo100% (3)
- 1 - Electroneumatica - Tema - MandosDocumento22 páginas1 - Electroneumatica - Tema - MandosJuan CamiloAinda não há avaliações
- CFP Djuvana Examen Semanal2Documento4 páginasCFP Djuvana Examen Semanal2LUIS ICHAICOTO BONCANCAAinda não há avaliações
- Instrucciones y Programacion Ako.Documento2 páginasInstrucciones y Programacion Ako.L Miguel Gonzalez SanchezAinda não há avaliações
- Informe Proteccion Generadores Grupo 4Documento60 páginasInforme Proteccion Generadores Grupo 4Frank FacebAinda não há avaliações
- Capitulo1 Capitulo1 Motor Chevrolet Dmax 3.0Documento0 páginaCapitulo1 Capitulo1 Motor Chevrolet Dmax 3.0Richard Salinas100% (1)
- 4 Manual Técnico Sensit Solid Digital y Pet Rev5Documento2 páginas4 Manual Técnico Sensit Solid Digital y Pet Rev5alejandro zanazziAinda não há avaliações
- Cam-Te-Co-F-71 Listado de Materiales Tableros Madrid v1 2019Documento28 páginasCam-Te-Co-F-71 Listado de Materiales Tableros Madrid v1 2019Robinson GuerreroAinda não há avaliações
- Instalación manual Detecta-6Documento45 páginasInstalación manual Detecta-6alexAinda não há avaliações
- Limpia ParabrisasDocumento9 páginasLimpia ParabrisasErick MaiguaAinda não há avaliações
- Pri 1700 V10-13 - 3512 Pgei 170050P34Documento11 páginasPri 1700 V10-13 - 3512 Pgei 170050P34Argenis JimenezAinda não há avaliações