Escolar Documentos
Profissional Documentos
Cultura Documentos
Proyecto de Fisica Final
Enviado por
Edgar De La CruzDireitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Proyecto de Fisica Final
Enviado por
Edgar De La CruzDireitos autorais:
Formatos disponíveis
DETERMINACIN DEL
COMPORTAMIENTO DE UN
AISLADOR DE BASE
FRICCIONANTE PARA EL
PROBLEMA DE INTERACCIN
SUELO-ESTRUCTURA, MEDIANTE
EL PLANTEAMIENTO DEL NDICE
DE ENERGA.
ESCUELA DE
INGENERIA
FACULTAD DE INGENERIA
CIVIL
UNIVERSIDAD PRIVADA DEL NORTE
1
PLAN DE PROYECTO
1. TITULO:
DETERMINACIN DEL COMPORTAMIENTO DE UN AISLADOR DE
BASE FRICCIONANTE PARA EL PROBLEMA DE INTERACCIN
SUELO-ESTRUCTURA, MEDIANTE EL PLANTEAMIENTO DEL NDICE
DE ENERGA.
2. AUTORES:
A
B
C
D
E
3. Duracin del proyecto
Desde del 12 de Mayo al 31 de Mayo del 2014
4. Cronograma de ejecucin del proyecto
ETAPAS
FECHA DE
INICIO
FECHA DE
TERMINO
DEDICACION
SEMANAL (Hrs)
a. Recoleccin
de datos
12 de Mayo 17 de Mayo
30 Horas
b. Anlisis de
datos
18 de Mayo 23 de Mayo
36 Horas
c. Redaccin
del informe
24 de Mayo
31 de Mayo
24 Horas
TOTAL 90 Horas
UNIVERSIDAD PRIVADA DEL NORTE
2
5. Presupuesto
5.1. BIENES
NOMBRE Y CARACTERSTICA TCNICA
Materiales de escritorio: UNIDAD CANTIDAD
COSTO
UNITARIO (S/.)
COSTO
TOTAL
Papel Bond A4 Millar 1 15 15
Corrector de tinta
lquida
Unidad 1 3 3
Lapiceros Unidad 5 0.5 2.5
Resaltador Unidad 1 3.6 3.6
Lpiz Unidad 5 1 5
Folder Manila Unidad 1 5 5
Borrador Unidad 3 1 3
Perforador Unidad 1 - 0
SUBTOTAL S/. 37.1
Equipamiento: UNIDAD CANTIDAD
COSTO
UNITARIO (S/.)
COSTO
TOTAL
Computadora
personal
Unidad 1 - 0
Impresora Unidad 1 - 0
Cartuchos de tinta Unidad 1 50 50
Memoria USB 4
GB
Unidad 1 28 28
SUBTOTAL S/. 78
5.2. SERVICIOS
UNIVERSIDAD PRIVADA DEL NORTE
3
NOMBRE Y CARACTERSTICA TCNICA
Pasajes y gastos de transporte: UNIDAD CANTIDAD
COSTO
UNITARIO
(S/.)
COSTO TOTAL
Movilidad Local 05 10 pasajes 0.7 S/. 35
SUBTOTAL S/. 35
Servicios de terceros: UNIDAD CANTIDAD
COSTO UNITARIO
(S/.)
COSTO TOTAL
Fotocopias Hojas 70 hojas 0.1 7
Impresiones Hojas 100 hojas 0.1 10
Internet Meses 3 meses 30 90
Luz Meses 3 meses 20 60
Anillados 06 3 18
SUBTOTAL S/. 185
5.3. RESUMEN
NOMBRE Y CARACTERSTICA TCNICA
COSTO TOTAL
Materiales de escritorio: S7. 37.1
Equipamiento: S/. 78
Pasajes y gastos de transporte S/. 35
Servicios de terceros: S/. 185
TOTAL S/. 335.1
EJECUCIN DE PROYECTO
UNIVERSIDAD PRIVADA DEL NORTE
4
1. RESUMEN
En esta tesis se estudia el comportamiento de una aislador de base friccionante para
el problema de interaccin suelo-estructura, utilizando el mtodo del ndice de energa
IE. Dicho mtodo cuantifica la transferencia de energa entre el plano de excitacin y
la base deslizante de los modelos de ensaye propuestos, proporcionando un anlisis
adecuado de caracterizacin de la transferencia de energa en la interfaz.
Adems se hace una comparacin de las respuestas modales de los diferentes tipos
de modelos ensayados bajo diferentes frecuencias de excitacin inducidas. As como
tambin se estudia la influencia de la flexibilidad del modelo y de la contribucin de los
efectos cinticos inerciales en el movimiento resultante. Se estudia al final la influencia
que tiene la distribucin de la masa en los desplazamientos relativos y en la disipacin
de energa segn la fase de deslizamiento.
2. PLANTEAMIENTO DEL PROBLEMA
Cmo determino el comportamiento de una aislador de base friccionante para el
problema de interaccin Suelo-Estructura?
3. FORMULACION DE LA HIPOTESIS
El concepto del ndice de Energa determina el comportamiento de un aislador de
base fraccionante para el problema de interaccin suelo-estructura.
4. OBJETIVOS
Objetivos Generales
Determinar el comportamiento de un aislador de base friccionante para el
problema de interaccin suelo-estructura.
Objetivos Especficos
UNIVERSIDAD PRIVADA DEL NORTE
5
Hacer una comparacin de las respuestas modales de los diferentes tipos
de modelos ensayados bajo diferentes frecuencias de excitacin inducidas.
Estudiar la influencia de la flexibilidad del modelo y de la contribucin de los
efectos cinticos inerciales en el movimiento resultante.
Estudiar la influencia que tiene la distribucin de la masa en los
desplazamientos relativos y en la disipacin de energa segn la fase de
deslizamiento.
5. FUNDAMENTO TEORICO (ANTECEDENTES Y JUSTIFICACION DEL PROBLEMA)
5.1 . ANTECEDENTES
Henrquez Muoz C (2014). Determinacin de esfuerzos en la cepa del
viaducto lnea 5 del metro, a partir de registros ssmicos del 27f. Donde
se determin que la zona ms solicitada de las cepas fue la base, lo que
concuerda con lo esperado. S pudo apreciar que los esfuerzos de corte y
momento desarrollados sobre la columna 1 fueron distintos a los de la columna
2, debido a la diferencia de carga esttica que acta sobre las cepas,
indiferentemente de si se trataba de una columna estacin o interestacin.
Esto se observa en los grficos de momento y corte donde las curvas
correspondientes a una columna se superponen con la otra, sin mayores
diferencias.
Saavedra Quezada M. (2005). Anlisis de Edificios con aisladores
ssmicos mediante procedimientos simplificados. Donde concluyo que la
solucin numrica simple del modelo lineal, en los pasos de tiempo definidos,
se obtuvieron resultados de mejor calidad con este modelo. Tambin que las
aproximaciones obtenidas mediante el procedimiento simplificado no
presentaron diferencias muy significativas en relacin a los resultados
obtenidos con ETABS Nonlinear, es decir, la magnitud del error es de un orden
razonable para una etapa de pre diseo.
UNIVERSIDAD PRIVADA DEL NORTE
6
Herrera Montesinos P. (2008). Estudio ssmico del viaducto quebrada el
salto. Donde resulto que la la modelacin refleja la distribucin real de rigidez
y masa de la estructura. Adems, el amortiguamiento usado segn el tipo de
anlisis representa bien el amortiguamiento que se supone que tiene el puente
en la realidad, ya que no se cuenta con datos experimentales. Es decir, no
debieran existir errores en los distintos anlisis realizados que se deban a
problemas con la modelacin. El modelo fue sometido a dos registros, uno real
y otro sinttico, cada uno con sus tres componentes del movimiento del suelo
(dos horizontales y una vertical). La duracin, magnitud, y otras caractersticas
son consistentes con las de la fuente del terremoto de diseo.
Quiroz Lozano J. (2010), Coeficiente de friccin ptimo para el diseo de
estructuras aisladas ubicadas en la costa de guerrero, Donde concluyo
que con respecto al coeficiente de friccin ptimo para el diseo del sistema de
aislamiento se concluye que un valor de 0.04 resulta adecuado para su
implementacin ya que presenta enormes ventajas no solo en cuanto al control
de las aceleraciones se refiere, sino en cuanto a los materiales para su
fabricacin ya que como se ha mostrado la combinacin de acero-tefln
generan coeficientes similares adems de permanecer constante tanto de
manera esttica como dinmica. Respecto al radio de curvatura es claro que
un rango comprendido entre 200 a 400 cm resulta adecuado para disminuir las
demandas transmitidas a la estructura. Aunque el Sistema Pndulo de Friccin
resulta una adecuada herramienta para el control tanto de los desplazamientos
como de las fuerzas transmitidas a la estructura, el excesivo comportamiento
no lineal adems de los cambios continuos en la rigidez de su sistema genera
vibraciones en altas frecuencias incrementando los niveles de aceleracin de
manera excesiva. Por lo tanto debe tenerse en cuenta que las frecuencias para
las cuales se calibran los contenidos por ejemplo hospitales, son altamente
vulnerables a las transmitidas por los SPF. Por otro lado, puede resultar
sumamente eficiente para aquellas estructuras en las que el dao en
contenidos no involucra grandes prdidas econmicas como lo pueden ser las
edificaciones de uso escolar.
UNIVERSIDAD PRIVADA DEL NORTE
7
5.2 JUSTIFICACION DEL PROBLEMA
Los movimientos ssmicos anualmente causan grandes prdidas humanas y
materiales. Las cuales, a medida que crece la densidad poblacional, se han ido
incrementando de manera significativa. Es por esto que en las ltimas dcadas, la
ingeniera ha investigado y desarrollado nuevos mtodos que pueden ayudar a
mitigar el impacto de este tipo de sucesos. Uno de los mtodos que se ha
desarrollado y en el cual est enfocada esta tesis es el denominado como
aislamiento ssmico en la base de las estructuras. sta es una tcnica de
diseo que busca reducir la energa que pasa a la estructura durante un sismo. Lo
cual se puede llevar a cabo mediante la implementacin de elementos flexibles o
discontinuos que sirven de aisladores entre la cimentacin de un edificio o puente
y la superestructura. El inicio de la implementacin de los aisladores de base en
las estructuras se remonta a dcadas anteriores. Las primeras aplicaciones de los
aisladores de base actuales fueron en puentes, debido a que por su estructuracin
y extensin (importante en algunos casos), hace que sean ms vulnerables a los
sismos. El objetivo de la tesis es analizar los resultados, para determinar la
respuesta de modelos de laboratorio aislados en la base mediante mecanismos
basados en la friccin. Lo cual se puede relacionar con ciertos sistemas de control
pasivo de disipacin de energa que trabajan por la friccin generada entre dos
superficies que sufren desplazamiento relativo, contribuyendo a que se presenten
prdidas de energa.
5.3 MARCO TEORICO
5.3.1. RIESGO SISMICO
Es comn que se trate de manera indistinta los trminos Peligro Ssmico y Riesgo
Ssmico, por lo cual, es importante hacer una diferenciacin entre stos. El peligro
ssmico se refiere al grado de exposicin que un sitio dado tiene a los
movimientos ssmicos, en lo referente a las mximas intensidades que en el
pueden presentarse y el riesgo ssmico es una medida que combina la
UNIVERSIDAD PRIVADA DEL NORTE
8
peligrosidad ssmica, con la vulnerabilidad y la posibilidad de que se produzcan en
ella daos por movimientos ssmicos en un perodo determinado. (Meli P. y Bazn
E., 2008) La sismicidad de nuestro pas se concentra especialmente en el sur y
est dominada fundamentalmente por la interaccin entre las placas ocenicas de
Rivera y de Cocos en el Ocano Pacfico y la placa Norteamericana, sobre la cual
se encuentra Mxico como lo muestra la figura.
En la Ciudad de Mxico, se tiene la experiencia de varios terremotos en los que el
peligro ssmico y el riesgo ssmico juegan un papel digno de consideracin. El 28
de Julio de 1957 se present un sismo de magnitud 7.9 grados en la escala de
Richter, cuyo epicentro se ubic en la costa de Guerrero a una distancia de 150
kilmetros de la Ciudad de Mxico. El cual caus la muerte de 50 personas. Lo
que indica que el peligro ssmico de la Ciudad de Mxico era bajo en comparacin
con el riesgo ssmico que presentaba (relativamente alto) debido a la respuesta de
los suelos lacustres sobre los cuales est construida la Cuidad. (Surez y
Reynoso, 2010)
Las observaciones del movimiento ssmico del suelo, muestran que las ondas
ssmicas sufren una amplificacin en las arcillas blandas de entre 8 y 50 veces
respecto de las amplitudes observadas en CU (el cual se encuentra sobre roca
firme). El fenmeno de amplificacin dinmica de las ondas ssmicas explica
porqu la ciudad de Mxico es mucho ms vulnerable a los fenmenos ssmicos
que otras ciudades ubicadas a distancias comparables del epicentro de un gran
temblor. (Surez y Reynoso, 2010).
UNIVERSIDAD PRIVADA DEL NORTE
9
5.3.2. RESEA HISTORICA DEL AISLAMIENTO SSMICO.
El concepto de aislamiento ssmico ha tenido la connotacin de proteccin contra
terremotos desde hace ms de 100 aos. Sin embargo, pese a su antigedad, en la
actualidad son relativamente pocas las estructuras que los utilizan. Hoy en da este
concepto presenta un avance significativo y se trabaja en la prctica ingenieril en
estructuras que por su importancia y tamao justifican su implementacin como una
alternativa de resistencia ssmica. A continuacin se presenta una breve cronologa de los
acontecimientos que dieron lugar a los sistemas de aislamiento actuales. El primer
sistema de aislamiento implementado en una edificacin, fue el que se utiliz en la
Escuela Heinrich Pestalozzi, en Skopje, Yugoslavia, en 1969. Este aplicaba un mtodo
Suizo denominado asilamiento total de la base en tres direcciones utilizando vigas de
caucho natural sin reforzar, para aumentar su periodo fundamental de vibracin (kelly,
1990)
Hoy en da Japn, Estados Unidos, Italia, Nueva Zelanda y China son los pases que ms
han aportado al desarrollo de estas tcnicas, (Robinson, 1998) En nuestro pas se han
aplicado, principalmente, disipadores pasivos basados en deformacin plstica, en
especial dispositivos de tipo ADAS (added damping and stiffness) (Whittaker, Bertero y
Alonso, 1989). Estos dispositivos ADAS, por estar compuestos de lminas delgadas de
acero comn (A36 entre otros), y por tener una geometra sencilla de manejar, se han
convertido en una opcin llamativa y econmica dentro de la prctica de la ingeniera
nacional. En la siguiente figura se muestra el Disipador tipo ADAS, tomado de Aiken et, al.
1993).
UNIVERSIDAD PRIVADA DEL NORTE
10
(Disipadores viscosos, fuente: www.taylordevices.com)
5.3.3. AISLADORES SISMICOS EN LA BASE DE LAS ESTRUCTURAS
Los aisladores ssmicos utilizados en la base de una estructura, son dispositivos
adicionales al sistema estructural, que entran en accin cuando ocurre un sismo.
Es decir, son colocados entre la cimentacin y la superestructura con el objetivo de
disipar parte de la energa a la que est sujeta la estructura durante movimiento
ssmico. En general, los dispositivos ms comunes empleados para el aislamiento
ssmico en la base de una estructura son aisladores constituidos por elastmeros
reforzados o de caucho natural con ncleos metlicos, amortiguadores o
elementos flexibles y aisladores friccionantes del tipo: deslizantes o basculantes.
La siguiente figura muestra la Tcnica de aislamiento en la base.
UNIVERSIDAD PRIVADA DEL NORTE
11
Aisladores de elastmeros
Los aisladores de elastmeros y los de caucho natural (Foto 1.2 y Figura 1.5)
estn compuestos por una serie de lminas de elastmeros o de caucho adheridas
entre s, intercaladas o no con lminas metlicas (tipo sndwich), con el fin de
proveer capacidad para soportar cargas verticales y horizontales para confinar el
ncleo que, por lo general, es de plomo.
El de la izquierda es el Aislador de caucho natural, mientras la figura de lado derecho muestra
las caractersticas internas del aislador.
Los efectos de aislamiento en este tipo de sistemas se producen no por la
absorcin de la energa ssmica sino por la desviacin a travs de la dinmica del
sistema (Kelly, 1997) Los apoyos elastomricos son rgidos en la direccin vertical
y flexibles en la direccin horizontal. A la fecha, estos sistemas han sido
implementados principalmente para aislar la vibracin de la estructura y en menor
cuanta para proteccin ssmica.
Aisladores flexibles y amortiguadores
En el caso de los aisladores flexibles, la disipacin de energa ocurre por el
incremento del perodo de vibracin de la estructura, alejndola del perodo de
vibracin natural del suelo. Los amortiguadores se utilizan para disminuir la
sensibilidad del sistema a ciertas vibraciones del suelo y la vulnerabilidad a pulsos
largos que ocurren en registros cercanos al epicentro del sismo. (Bozzo, 2001).
UNIVERSIDAD PRIVADA DEL NORTE
12
Los tipos de amortiguadores ms utilizados como complemento a los sistemas de
aislamiento son los amortiguadores metlicos como lo muestran las siguientes fotos.
Amortiguadores metlicos. (Revista EIA 2006)
Los aisladores, como elementos flexibles, trabajan en el rango elstico y los
amortiguadores, como elementos rgidos, presentan comportamiento elasto-plstico.
Eso hace que la energa ssmica se atene, de forma parcial antes de ser transmitida
a la superestructura. Haciendo que la energa total sea balanceada por
amortiguamiento propio del sistema, y reduciendo la energa elstica y cintica.
(Dargusth and Soong, 1997) La rigidez inicial aportada por los amortiguadores
controla las vibraciones menores y da confort a los usuarios.
Aisladores friccionantes
El principio de los aisladores ssmicos por friccin se basa en el aislamiento en la
interfaz suelo-cimentacin, es decir, la superestructura es aislada parcialmente del
movimiento ssmico al introducir una interfaz entre la cimentacin y la base de la
estructura. As, el sistema de aislamiento cambia el perodo fundamental de la
estructura y disipa energa. (Botero, 2004) En cuanto a los aisladores de friccin se
cuenta con los apoyos deslizantes y los apoyos basculantes tipo pndulo de friccin
(Figura 1.6). Los apoyos basculantes consisten en una base cncava sobre la que se
colocan un patn esfrico articulado y una platina de cubierta. La base cncava tiene la
funcin de restaurar la posicin original del sistema, mientras que las superficies
deslizantes, esferas, disipan energa por friccin. El movimiento que se produce en el
UNIVERSIDAD PRIVADA DEL NORTE
13
dispositivo durante la accin de un sismo es similar al movimiento de un pndulo.
(Oviedo A.J. y Duque, 2006)
Aislador de friccin.
En los apoyos deslizantes las columnas descansan sobre elementos de deslizamiento
de tefln o acero inoxidable y se genera disipacin de energa por friccin. El uso de
este tipo de sistemas es cada vez ms comn en el mundo y constituye una tcnica
que debe ser considerada en zonas de alto riesgo ssmico. Aunque la implementacin
de stos en la actualidad implica un costo inicial mayor, el beneficio y la inversin se
ven reflejados al momento de ocurrir un sismo.
5.3.4. TEORIA DE LA FRICCION ESTATICA Y CINETICA
Estudio de las fuerzas de friccin
Las fuerzas que actan sobre un bloque rgido deslizante (Figura 1.7), se calculan con
base en las siguientes consideraciones: La fuerza resistente (Ecuacin 1.1) depende
del esfuerzo normal y del coeficiente de friccin desarrollados entre la base del bloque
rgido deslizante y la superficie de apoyo. El coeficiente de friccin se modifica cuando
la masa de suelo empieza a deslizar.
Diagrama de cuerpo libre de un bloque rgido en equilibrio lmite bajo la accin de una
aceleracin horizontal.
UNIVERSIDAD PRIVADA DEL NORTE
14
Dnde: g es la aceleracin horizontal de la excitacin actuando sobre el bloque, es
el coeficiente de friccin en la interfaz de deslizamiento, g es la aceleracin de la
gravedad, m es la masa del bloque, F y N son la fuerza de friccin y normal,
respectivamente.
El coeficiente de friccin () es adimensional y representa las caractersticas de las
superficies de contacto. La fuerza normal es la resultante de las acciones de la
aceleracin del terreno y de la aceleracin de la gravedad sobre la masa del
sistema. Esta fuerza vara en el tiempo debido a que la aceleracin del terreno no
es constante. Para poder hacer una distincin adecuada de las fuerzas de friccin
esttica y cintica que se presentan en la superficie de deslazamiento, es
necesario considerar los estudios recientes entorno al coeficiente de friccin
presentado en la ecuacin (1.3).
Variacin del coeficiente de friccin.
Las ecuaciones siguientes estudian la variacin del coeficiente de friccin.
Modelo experimental, utilizando mesa vibradora, propuesto por Mndez,
2009:
La siguiente ecuacin (1.7), parte de los resultados de los experimentos realizados
en mesa vibradora y modela la variacin del coeficiente de friccin desde un punto
de vista experimental.
UNIVERSIDAD PRIVADA DEL NORTE
15
Donde (t) es la velocidad de la excitacin del sistema y es una constante
experimental que depende del material de la interfaz y las caractersticas de la
excitacin (frecuencia, amplitud, etc.).
Modelo del coeficiente de friccin adaptado para el anlisis dinmico
de estructuras deslizantes.
A continuacin se presentan las ecuaciones resultantes de la investigacin,
atendiendo a la variacin (ya mencionada) del coeficiente de friccin. Se obtuvo la
ecuacin siguiente:
La ecuacin (1.8), es la forma adaptada para el caso horizontal de la variacin del
coeficiente de friccin utilizando el mtodo de Newmark modificado (Botero, 2008).
Los detalles de la modificacin al mtodo de Newmark se pueden consultar en el
trabajo de Botero 2004 y Mndez 2008. Donde y es la aceleracin de fluencia
(Newmark, 1963,1965) H es la funcin escaln unitario:
Se presentan los resultados del movimiento en el plano horizontal slo con fines
ilustrativos.
UNIVERSIDAD PRIVADA DEL NORTE
16
Ciclo de deslizamiento ilustrativo del comportamiento observado en el Laboratorio (Botero,
2004), junto con la respuesta asumida conforme al mtodo de Newmark.
En esta figura se muestran las aceleraciones de la excitacin, g, y de respuesta, ,
registradas experimentalmente durante uno de los ensayes realizados con la interfaz
madera madera sobre un plano de deslizamiento horizontal
5.3.5. INDICE DE ENERGIA(IE)
El concepto del ndice de Energa se basa en las hiptesis planteadas en el estudio
Modelo Bidimensional No Lineal para el Anlisis del Comportamiento Dinmico de
Estructuras Trreas (Botero, 2004). Esta es una relacin entre la energa suministrada
por la excitacin y la energa presente en la superestructura, como consecuencia de dicha
excitacin. Con esto se busca determinar la influencia de la aceleracin cintica generada
por el efecto del desplazamiento relativo del modelo, los efectos inerciales causados por
la flexibilidad de la estructura, los modos de vibracin, y la influencia de la frecuencia de
excitacin en la respuesta de la estructura con aisladores de friccin.
UNIVERSIDAD PRIVADA DEL NORTE
17
El ndice de Energa se define de la siguiente forma:
ndice de Energa (IE) =Energa de salida / Energa de entrada (2.1)
Donde:
Energa de entrada = es la correspondiente a un ciclo de la excitacin, determinada en el
plano de deslizamiento.
Energa de salida = es calculada en la base del modelo en el mismo ciclo.
Cuando el IE es igual a la unidad quiere decir que toda la energa, aportada por la
excitacin se transmite a la estructura, lo cual es indicativo de que esta se encuentra
acoplada a la base de la mesa vibradora o en casos reales, el edificio no posee
disipadores de energa por friccin (y de ningn otro tipo). Cuando el IE es menor que1,
quiere decir que existe disipacin de energa a travs de la interfaz. Es importante anotar
que la energa resultante en la estructura no es nicamente la que pasa por la interfaz,
sino que estar compuesta tambin por las aportaciones de los efectos inerciales,
cinticos y modales.
Las hiptesis consideradas en el estudio de la respuesta de la estructura a nivel de
desplazamientos relativos y aceleraciones resultantes, son:
Influencia de la flexibilidad de la estructura.
Influencia de la distribucin de la masa.
Variacin del coeficiente de friccin cintica respecto del coeficiente de
friccin esttico.
Influencia de los modos de vibracin.
Influencia de los materiales en contacto en la interfaz de deslizamiento.
Contribucin de la frecuencia de excitacin.
UNIVERSIDAD PRIVADA DEL NORTE
18
Cuantificacin terica de la energa cintica.
La energa de excitacin y la energa resultante en la base del modelo se calculan con
la siguiente ecuacin:
Dnde:
E = es la energa de excitacin o la energa resultante en la base del modelo, m = es la
masa del modelo
v = es la velocidad resultante de la integracin del acelerograma en la base deslizante.
Con el objetivo de cuantificar la energa que se transmite a travs de la interfaz de
deslizamiento, se presenta ms adelante el clculo de esta y su variacin con respecto a
la configuracin estructural adoptada (cuerpos rgidos y flexibles).
CUERPOS RIGIDOS
La referencia ms conocida del estudio de cuerpos rgidos sujetos a movimiento
deslizante la encontramos en la propuesta de Newmark 1963, que estudia el
deslizamiento de los taludes sujetos a movimientos ssmicos y se modela a la cua
deslizante como si fuera un bloque rgido sobre un plano inclinado. El desplazamiento
relativo del bloque es causado por un pulso simple, cuando se le induce una aceleracin
superior a la aceleracin de fluencia. En este mtodo se asume que las fuerzas actan en
el centro de gravedad del bloque rgido y que la fuerza resistente es continua durante la
excitacin. Adems, supone al coeficiente de friccin esttica igual al coeficiente de
friccin dinmica.
Sin embargo, como puede inferirse, los desplazamientos por sismo, calculados con este
mtodo, generalmente difieren de los desplazamientos reales, debido a la sobre
simplificacin del problema. Siendo este aspecto delicado, debido a que se presenta una
UNIVERSIDAD PRIVADA DEL NORTE
19
subestimacin en la respuesta del bloque deslizante. Tomando en cuenta las limitantes
que implica el mtodo y adecuando el concepto al de una estructura rgida sobre un plano
horizontal, se asumi la ocurrencia de la variacin de la friccin durante el movimiento, la
influencia de la frecuencia de excitacin y la transferencia de energa en la interfaz para el
anlisis del bloque rgido propuesto en este captulo. Las fuerzas que intervienen en el
movimiento del modelo de cuerpo rgido utilizado en el laboratorio, sometido a una
excitacin en su base, se muestran en el diagrama de cuerpo libre como lo muestra la
figura.
Diagrama de cuerpo libre del modelo rgido utilizado.
Cuantificacin del ndice de Energa.
Para cuantificar el IE de un cuerpo rgido y evaluar su respuesta dinmica, se parte de
las historias de aceleracin registradas por medio de los acelermetros. A partir de
stas se obtienen las historias de velocidades y desplazamientos por medio de la
integracin de la seal para la primera y la doble integracin para la segunda.
UNIVERSIDAD PRIVADA DEL NORTE
20
Representacin esquemtica del modelo de cuerpo rgido utilizado para los ensayes.
Los pasos a seguir para evaluar el ndice de energa en el modelo de cuerpo rgido
son:
1) Se registran las historias de aceleracin.
2) Se obtiene la curva de velocidades integrando la curva de aceleraciones con respecto
al tiempo.
3) Se obtiene la curva de desplazamientos relativos integrando la curva de velocidades
con respecto al tiempo.
4) Se seleccionan los puntos de inters en la curva de aceleraciones registradas.
5) Se calcula la energa cintica por medio de la ecuacin 11 en la mesa y el modelo en
dichos puntos.
6) Se calcula el ndice de energa utilizando la ecuacin 10.
7) Se grafica el ndice de energa (IE) en funcin de la frecuencia de excitacin y los
desplazamientos relativos para caracterizar las fases de deslizamiento entorno a la
disipacin de energa.
5.3.6. CUERPO FLEXIBLES
Cuantificacin del ndice de Energa
La determinacin del (IE) en los modelos flexibles se lleva acabo siguiendo los mismos
pasos 1) a 7) que se presentaron para el caso del cuerpo rgido. Sin embargo, el estudio
UNIVERSIDAD PRIVADA DEL NORTE
21
dinmico modal de este modelo implica un anlisis detallado debido a que existe
influencia de la flexibilidad de la estructura y de los modos superiores de vibracin as
como de los efectos cinticos generados durante el movimiento del modelo.
Anlisis modal.
Para realizar el anlisis dinmico modal de los modelos flexibles, se utiliza la ecuacin
1.10 presentada en el inciso 1.5, adaptada para los modelos de 1, 2 y 3 grados de
libertad, respectivamente.
Ecuacin de movimiento
Expresando la ecuacin 1.10 en trminos de los vectores de fuerza se tiene:
Donde los vectores de fuerza son:
k, c y m representan la rigidez, amortiguamiento y masa del modelo, es el vector de
aceleracin relativa entre la mesa el modelo, es el vector de velocidad relativa y xt es el
desplazamiento total con respecto a su posicin inicial general, xg es el desplazamiento
del terreno y x es el desplazamiento de la masa con respecto a su base. En la figura
siguiente se puede apreciar, los vectores de fuerza que intervienen en el movimiento de
los modelos flexibles de 1, 2 y 3 grados de libertad utilizados. Es importante mencionar
que estos grados de libertad fueron considerados como dinmicos y no estticos, debido
a que las fuerzas de inercia importantes son solamente las que generan las masas al
UNIVERSIDAD PRIVADA DEL NORTE
22
moverse lateralmente y las dems deformaciones de los nudos se consideraron
despreciables.
Representacin esquemtica de los modelos flexibles ensayados.
Para simplificar los clculos se considera que el efecto del vector de fuerzas por
amortiguamiento (Fc) puede ser incluido por separado en la respuesta total del sistema
ensayado (se asume un amortiguamiento del 5%) y considerando que no existe
movimiento del terreno, la expresin 2.3 se convierte en:
La solucin de la ecuacin 2.4 corresponde a un problema de valores caractersticos cuya
solucin es:
Dnde: M, K son las matrices de masa y rigidez del modelo flexible, y es la frecuencia
natural circular de vibracin.
La secuencia de clculo a seguir para el anlisis modal de los modelos flexibles es la
siguiente:
1) Se determina la matriz M de masas de los modelos flexibles.
2) Se determina la matriz K de rigideces de los modelos flexibles.
3) Se calculan los valores y vectores propios 2, con la ecuacin 2.5.
UNIVERSIDAD PRIVADA DEL NORTE
23
4) Se calcula la frecuencia natural circular de vibracin con la siguiente ecuacin:
5) Se calcula el periodo natural de vibracin con la siguiente ecuacin:
6) Se calculan las formas modales normalizadas con la siguiente ecuacin:
Dnde: = es el componente de la forma modal normalizada
mjj= masa concentrada en el nudo j.
ujn= el componente, para el nudo j, del vector propio asociado con el nudo n.
7) Se determina el factor de participacin modal de la manera siguiente:
Donde:
M=matriz de masas del modelo.
T=matriz transpuesta de frecuencias modales normalizadas.
Mn se calcula como:
UNIVERSIDAD PRIVADA DEL NORTE
24
8) Finalmente se calculan los desplazamientos relativos mximos con la ecuacin (2.11)
5.3.6. INFLUENCIA DE LA FRECUENCIA DE EXITACIN EN LOS MODELOS
ESTUDIADOS.
La influencia de la frecuencia de excitacin en el comportamiento del aislador de base
friccionante es importante, porque participa en la determinacin de la forma de disipar la
energa y en la magnitud de los desplazamientos relativos.
El cambio en la frecuencia de excitacin en los modelos de ensaye, se realiza utilizando
un sistema de cmputo (Foto 2.1), el cual tambin adquiere y procesa las seales de los
acelermetros y del sensor de desplazamiento lineal (LVDT).
Los detalles del equipo pueden consultarse en el captulo 3 de esta tesis. Sistema de
cmputo.
UNIVERSIDAD PRIVADA DEL NORTE
25
Equipo de laboratorio utilizado para realizar los ensayes (Botero 2004).
La importancia de variar la frecuencia de excitacin en la base es para analizar su
influencia en la energa que se transmite en la interfaz y la influencia de la flexibilidad de
los modelos de 1, 2 y 3 GDL utilizados.
6. DISEO, MATERIALES Y EQUIPOS
6.1. DISEO DE CONTRASTACION
La investigacin es experimental y prospectiva.
De una casilla cuyo esquema es:
M: X ---- O
Dnde:
M: La Muestra est dada por algunos materiales destinados para los
distintos experimentos que se realizar.
X: El problema de interaccin Suelo - Estructura
UNIVERSIDAD PRIVADA DEL NORTE
26
O: El ndice de Energa
6.2. MATERIALES Y EQUIPOS
Equipo de Laboratorio
6.2.3. Descripcin de la Mesa Vibradora
La mesa (Figura 3.1 y Foto 3.1) est compuesta por un marco rgido sobre el cual
descansa la base deslizante. En ste marco, estn montados el actuador o pistn
neumtico el cual produce la excitacin, un sensor de posicin, una servo-vlvula
que regula el caudal de aire y el sentido de este para producir el desplazamiento
del pistn. Adems, un tanque para altas demandas de aire, la tarjeta de conexin
de la instrumentacin, el acondicionador del sensor de desplazamiento lineal que
sirve para determinar la posicin del modelo (Lvdt) y los acelermetros de tres
ejes.
UNIVERSIDAD PRIVADA DEL NORTE
27
Base deslizante La base deslizante (Figuras 3.3 y 3.4) est conformada por dos
marcos de acero los cuales se encuentran unidos por medio de cuatro soportes y
estn colocados uno sobre el otro. Sobre el marco superior se encuentra colocada
una lmina de madera.
Base del modelo para ensayes El modelo propuesto de masas cilndricas consta
de una base de aluminio (Figuras 3.5 y 3.6) apoyada sobre una lmina de madera.
UNIVERSIDAD PRIVADA DEL NORTE
28
Estructura flexible adosada a la base para ensayes. Con el fin de evaluar el
efecto de la influencia modal y de la inercia en la respuesta del modelo, se utiliz
un sistema de tres cilindros de aluminio soportados por dos varillas (Foto 3.5).
En el plano superior de la base mvil se encuentra fijo un sistema de gua (Figura
3.7 y Foto 3.6), el cual garantiza que el desplazamiento del modelo ser
nicamente en la direccin de la excitacin y que la base de ste permanecer en
UNIVERSIDAD PRIVADA DEL NORTE
29
todo momento en contacto con la lmina de madera. El sistema para guiar al
modelo longitudinalmente consta de dos lminas de aluminio las cuales se
encuentran en contacto con la base del modelo.
La base del modelo est diseada para garantizar que la parte superior este siempre
horizontal, con lo que se evita que se presente una descomposicin de fuerzas y se
presenten momentos de volteo, adems de que exista consistencia en el modelado
numrico.
UNIVERSIDAD PRIVADA DEL NORTE
30
6. PROCEDIMIENTO
6.1. VARIACION DE LA FRICCION
Se escogi la madera porque presenta duracin en sus propiedades de friccin
y desgaste (lineales y constantes) y ostenta adems, facilidad de trabajo para
llevar acabo los ensayes en el laboratorio. Es importante considerar que la
madera es sensible a las condiciones ambientales (humedad en mayor
porcentaje y temperatura). Por lo cual, se verific conservar estas condiciones
en parmetros similares en las pruebas realizadas, cuidndose que los
ensayes se hicieran en un rango de temperatura y humedad lo ms constante
posible. El contenido de humedad de los artculos de madera ordinarios en
condiciones atmosfricas promedio est comprendido entre el 10 y el 20%.
UNIVERSIDAD PRIVADA DEL NORTE
31
Este porcentaje de humedad, se encuentra dentro del rango en donde se altera
ms significativamente el comportamiento friccionante de la madera (Borden y
Tabor 1964). Un contenido de humedad arriba de este porcentaje tiene poco
efecto en el comportamiento de la madera. Es por ello que todos los ensayes
con madera se realizaron a una humedad relativa aproximadamente constante,
alrededor del 60 %, tpica de las condiciones del laboratorio de mecnica de
suelos del Instituto de Ingeniera.
6.2. VARIACIN DE LA EXCITACIN
Se efecta la variacin de la frecuencia de excitacin en las pruebas para estudiar
el efecto de la disipacin de energa para cada tipo de modelo (flexible o rgido).
Como se mencion al principio del captulo, enseguida se describen las
caractersticas que intervienen en el manejo de la excitacin, es decir, la forma en
la que se modifica la frecuencia de excitacin, la descripcin de los elementos
utilizados y la manera en la que se toman registros.
Procedimiento
Inicialmente, los modelos son excitados mediante un movimiento armnico con
una frecuencia inicial de 3.4 Hz con el fin de calibrar los modelos y el equipo. Las
historias de desplazamientos relativos y las de aceleraciones resultantes son
registradas durante las pruebas. Para analizar los resultados experimentales se
captura una ventana de tiempo de un nico ciclo de deslizamiento completo para
cada prueba. Las ventanas son elegidas por la calidad de los registros y la
ubicacin de stas dentro de la prueba total (en la cual se busca minimizar los
efectos del arranque del ensaye, los cuales son irregulares por las caractersticas
propias de un equipo neumtico). Solo una ventana de tiempo por prueba es
considerada porque todas las historias de tiempo son peridicas. Antes de
proceder a la realizacin de los ensayes se determinan diversas pruebas en las
que se hace variar la frecuencia de excitacin para calibrar el modelo y para
determinar el rango de operacin de la mesa vibradora, de esta manera, se
pretende observar el rango de frecuencias para el cual movimiento de la mesa y
del modelo son consistentes. La seal generada de entrada es un seno con
UNIVERSIDAD PRIVADA DEL NORTE
32
amplitud de 6 cm. Posteriormente, se realiza una variacin de la frecuencia en un
rango comprendido entre 2 y 3.5 Hz. Finalmente, se comprueba la reproducibilidad
de los resultados en los rangos de frecuencias analizados.
6.3. VARIACIN DE LA DISTRIBUCIN DE LA MASA
La finalidad es estudiar la variacin de la distribucin de la masa para analizar la
respuesta dinmica de las estructuras con base fija y sobre una interfaz de
deslizamiento, adems de considerar modelos rgidos y flexibles con diferentes
grados de libertad.
Modelos flexibles.
Se utilizaron modelos de 1, 2 y 3 grados de libertad para las condiciones de apoyo
fijo y libre respectivamente. Constituidos por placas cilndricas de aluminio y dos
varillas de acero como soporte, montados en una mesa vibradora (como se vio en
el captulo 3). Se registraron las aceleraciones en los nodos en los que se
concentran las masas. Los modelos tienen peso y rea de contacto equivalente.
UNIVERSIDAD PRIVADA DEL NORTE
33
Modelo rgido
Se utiliz un modelo que fuera comparable con los modelos flexibles (mismos que
se presentan ms adelante), en lo referente al peso equivalente, rea de la base,
friccin y materiales en contacto en la interfaz, pero con la configuracin de un
bloque rgido tipo Newmark (Figura 23), deslizando sobre un plano horizontal
inducido por una frecuencia de excitacin de 2 a 2.3 Hz. Se utiliz un bloque rgido
de aluminio con medidas 15 x 25 x 3.5 cm.
Modelo representativo del bloque rgido de base libre utilizado para los ensayes.
UNIVERSIDAD PRIVADA DEL NORTE
34
Se utiliz, adems, un sensor de desplazamiento (LVDT) para indicar los
desplazamientos que sufre el modelo en la base, y definir la historia de
desplazamientos en los ensayes. Se cuid que el material de las superficies en
contacto tuviese las mismas caractersticas tanto para el modelo de bloque
rgido como de los modelos flexibles.
7. OBTENCIN DE DATOS
El objetivo principal de este captulo es analizar los resultados obtenidos de los
ensayes y determinar la variacin del ndice de Energa (IE) en cada modelo con
respecto a la frecuencia de excitacin y desplazamientos relativos. Adems, se
examina tambin la contribucin de la distribucin de la masa, la flexibilidad y los
efectos inerciales en el movimiento del modelo.
En primera instancia, se estudia el comportamiento del material utilizado en la
interfaz para observar el acoplamiento y desacoplamiento del plano de movimiento
con respecto a la base del modelo, buscando interpretar adecuadamente el
fenmeno de friccin que se presenta durante el inicio de la prueba.
Posteriormente, se analizan las historias de aceleracin registradas en los nodos y
en la interfaz para cada frecuencia de excitacin ensayada, con el objetivo de
determinar las diferencias en las respuestas del modelo y su relacin con el ndice
de energa. Finalmente se vara la distribucin de la masa para cuantificar el IE y
observar el efecto cintico que generan las fuerzas de inercia en cada modelo
ensayado. De esta forma, se busca una mejor interpretacin del movimiento de
una estructura con un aislador del tipo friccionante en la base.
7.1. MATERIALES EN CONTACTO
Anlisis de un ciclo de aceleracin tpico en el modelo flexible.
Las aceleraciones entre el plano de deslizamiento y la base del modelo, se
presenta a continuacin con el fin de identificar la respuesta del modelo en los
puntos crticos del movimiento.
UNIVERSIDAD PRIVADA DEL NORTE
35
Historia de aceleracin registrada para el modelo flexible de 3 GDL para la interfaz
madera-madera.
En la grfica 5.1 se muestran las historias de aceleracin registradas en un
ensaye dinmico con plano horizontal. Debido a que el comportamiento que se
presenta en las historias de aceleracin es cclico, en la figura 5.1 se muestra slo
un ciclo (representativo) del mismo para analizar la respuesta del modelo flexible.
En este modelo se varia la frecuencia de excitacin de 1.3 a 2 Hz con incrementos
de 0.3 Hz y se definen seis puntos en el ciclo de deslizamiento para analizar su
comportamiento (puntos A, B, C, C, D y E.
Ciclo de deslizamiento ilustrativo del comportamiento observado en el Laboratorio
UNIVERSIDAD PRIVADA DEL NORTE
36
El punto A muestra cuando inicio el ciclo, el punto B indica el comienzo de los
desplazamientos relativos, el punto C y C corresponden a las aceleraciones mximas
registradas de la aceleracin de excitacin y de respuesta, en el punto D coinciden ambas
aceleraciones y finalmente en el punto E los desplazamientos relativos son nulos.
Desde el punto A hasta el punto B, tanto la aceleracin de excitacin en la base del
modelo como de respuesta tienden a incrementarse similarmente debido a que en ese
lapso no existen desplazamientos relativos en la interfaz. A este se le conoce como
longitud de transicin y representa el cambio de las condiciones estticas a dinmicas.
El coeficiente de friccin que se presenta para esas condiciones es el esttico.
En el punto B se alcanza una aceleracin de fluencia de 2.95 m/s2. A partir de este punto,
el valor de la aceleracin de excitacin aumenta muy por encima de la aceleracin de
respuesta hasta llegar a un valor de 5.04 m/s2 en el punto C y el valor de la aceleracin
mxima de respuesta es de 3.4 m/s2 en el punto C, y disminuye hasta llegar al punto D
en donde nuevamente se acoplan las aceleraciones. Lo que representa un incremento del
33 % de la aceleracin de excitacin sobre la de respuesta. Lo cual, implica que no toda
la energa de la excitacin est siendo transferida a la base del modelo, lo que conlleva a
que se disipe la energa en la interfaz, durante esta etapa de deslizamiento. El coeficiente
de friccin que se presenta para esas condiciones es el cintico.
Como puede inferirse de los puntos mencionados anteriormente, las caractersticas del
cambio de la friccin esttica a cintica depende del comportamiento de las superficies en
contacto (interaccin: cimentacin-material aislador-superestructura) as como tambin de
la excitacin en el plano de deslizamiento y de la distribucin de la masa en el modelo.
Posteriormente, al pasar del punto D al E, existe un comportamiento contrario al descrito
arriba, el cual presenta un desacoplamiento en las aceleraciones registradas, es decir,
mientras que por un lado la aceleracin de excitacin comienza a disminuir, por el otro la
aceleracin de respuesta del modelo se mantiene. As, se observa como en esa fase de
deslizamiento, el modelo conlleva el efecto cintico en su movimiento debido a la
aceleracin ganada en la fase anterior (efecto llamado Momemtum en fsica, referida al
movimiento que desarrolla la inercia).
UNIVERSIDAD PRIVADA DEL NORTE
37
En seguida se estudiar el efecto que produce la variacin de la frecuencia de excitacin
en el plano de deslizamiento y la influencia de la flexibilidad del modelo, sobre la
respuesta dinmica modal para la cuantificacin del IE.
7.2. FRECUENCIA DE EXCITACIN
Se presentan los resultados de los ensayes experimentales llevados a cabo en mesa
vibradora para analizar la influencia de la flexibilidad y la frecuencia de excitacin en el
comportamiento dinmico del modelo desde el punto de vista experimental.
Se calcularon las respuestas modales del modelo flexible de 3 grados de libertad de base
libre (Figura 5.2), para analizar la contribucin de los modos de vibracin a la respuesta
del modelo con aislador friccionante.
Sistema de tres grados de libertad dinmicos utilizado para los ensayes
Para determinar las caractersticas del modelo anterior, se realizaron algunas pruebas en
el laboratorio previas al comienzo de los ensayes.
Se determin el rango de operacin de acuerdo a la sensibilidad de los instrumentos para
tomar lecturas. Se estableci la rigidez de las varillas del modelo mediante una prueba
esttica, en la cual se toma una de las varillas de acero que conforman la parte flexible y
UNIVERSIDAD PRIVADA DEL NORTE
38
se le aplica una carga vertical en el extremo (mediante una pesa atada en la punta), y
posteriormente se mide la deflexin.
De esta manera, se determina la rigidez a flexin mediante la relacin k= F / , donde: k
es la rigidez del elemento, es la deflexin medida en el extremo de la barra y F es la
fuerza aplicada en el extremo de la misma.
El mdulo de rigidez a flexin resulta aproximadamente de 118 N/m. Se determin un
coeficiente de friccin esttica de 0.83, mediante una prueba de deslizamiento en un
plano inclinado. Con base en esto, se determina, de acuerdo a la experiencia en este tipo
de ensayes, un coeficiente de friccin cintica 15% menor que el coeficiente de friccin
esttica. El modelo pesa 1.96 Kg.
Para visualizar las fases de acoplamiento al inicio del ciclo de movimiento (punto A de la
figura 5.1) se compara la aceleracin de excitacin con la de respuesta en la base del
modelo para las frecuencias 1.36, 1.50, 1.7, 1.76, 9 y 2Hz (de las grficas 5.2, A a F)
seleccionadas.
UNIVERSIDAD PRIVADA DEL NORTE
39
UNIVERSIDAD PRIVADA DEL NORTE
40
A a F. Aceleraciones de excitacin y de respuesta en la base del modelo para el punto A
En las figuras anteriores, se observa que las aceleraciones de excitacin y respuesta
coinciden en el punto A al inicio del ciclo de deslizamiento para cada frecuencia de
excitacin. A simple vista no existen diferencias significativas entre una y otra grfica en
dicho punto, sin embargo, al graficar los valores de las aceleraciones registradas, stos
difieren entre s. (Figura 5.3) Se unieron las aceleraciones con una lnea continua para
observar de manera grfica las diferencias en los valores registrados tal y como se
muestra en la figura siguiente.
UNIVERSIDAD PRIVADA DEL NORTE
41
Aceleraciones de excitacin y respuesta del modelo flexible para el punto A
Se observa que para las frecuencias de 1.36, 1.9 y 2 Hz las lneas que unen a
ambas aceleraciones tienen pendiente negativa, implica que la respuesta es
menor que la excitacin. El ndice de energa se presenta en la siguiente tabla:
IE calculado para las frecuencias de 1.36, 1.9 y 2 Hz
En el punto A se aprecia que las diferencias en el cambio de pendiente de las
grficas de la figura 5.3 corresponden a los casos extremos de la frecuencia de
excitacin, es decir, para la frecuencia inicial de 1.36 Hz y las frecuencias de
excitacin ltimas (1.9 y 2 Hz) del ciclo de movimiento, se tienen menores
aceleraciones de respuesta en la base del modelo. Lo que sugiere que al ser
UNIVERSIDAD PRIVADA DEL NORTE
42
menor la respuesta, tanto para las frecuencias iniciales como las ltimas, el
modelo se encuentra en una etapa de pre-acoplamiento en la que es posible que
se desarrolle un fenmeno de levantamiento de la base del modelo con respecto
al plano de excitacin o bien que el aislador entre en juego al generarse
desplazamientos relativos pequeos.
Por otro lado, para las frecuencias intermedias del ciclo de deslizamiento (1.5, 1.7
y 1.76 Hz) se tienen mayores aceleraciones de respuesta en la base del modelo
para el mismo punto, lo que sugiere que para estas frecuencias los efectos
inerciales son mayores y no se alcanza a desarrollar un fase de pre-acoplamiento
tan marcada. Para las frecuencias de 1.36 y 2 Hz existe similitud en el ndice de
Energa calculado en la interfaz y tambin en la forma de sus grficas de la figura
5.3, mientras que para la frecuencia de 1.9 Hz se muestra un desfase debido a
que no se desarrolla nuevamente de forma clara la etapa de acoplamiento de los
dos cuerpos.
La incidencia de la frecuencia en la respuesta dinmica del modelo, aunado al
efecto cintico adicional que provocan las fuerzas inerciales, hace que la
transferencia sea diferente en cada uno de los casos, es decir, las aceleraciones
en cada uno de los nodos del modelo contribuye a que la respuesta modal sea
mayor o menor y, consecuentemente, ello afecta el nivel de transferencia de
aceleracin en la base. (Se analizar ms adelante este aspecto) Para las
frecuencias de 1.5, 1.7 y 1.76 Hz, las lneas presentan pendiente positiva, lo cual
implica que la respuesta es mayor que la excitacin. Por lo que el IE calculado
para estas frecuencias es:
IE para las frecuencias de 1.5, 1.7 y 1.76 Hz
UNIVERSIDAD PRIVADA DEL NORTE
43
En este caso se puede apreciar que el IE alcanza un valor de ms de 1.0, sin
embargo es probable que este comportamiento sea el resultado de la contribucin
de las aceleraciones que aportan las masas en los nodos a la base del modelo, es
decir, que la mayor parte de aceleracin registrada en la respuesta del modelo
proviene de los efectos inerciales adquiridos de la fase ltima del ciclo de
deslizamiento anterior. Durante el movimiento, se libera energa cintica que
provoca micro desplazamientos relativos espordicos en la base similares a un
jaln
Para observar los efectos de la aceleracin inercial en el punto A se calcularon los
modos de vibracin de las frecuencias ya mencionadas. En la siguiente figura se
muestra la variacin del primer modo de vibracin al comienzo del movimiento (en
el punto A) al incrementarse la frecuencia de excitacin para la interfaz madera-
madera.
Primer modo de vibracin calculado para el punto A de las frecuencias seleccionadas
UNIVERSIDAD PRIVADA DEL NORTE
44
Como se vio en prrafos anteriores, para las frecuencias de 1.36, 1.9 y 2 Hz la
aceleracin de respuesta es menor que la de excitacin, por lo que el ndice de
Energa es menor a 1, esto implica que una parte de la energa cintica se
transmite al modelo a travs de la interfaz (contribucin de la aceleracin inercial
al movimiento), reflejndose en una respuesta dinmica modal mayor para esas
frecuencias en el primer modo de vibracin.
Por otro lado, se vio que para las frecuencias de 1.5, 1.7 y 1.76 Hz, la aceleracin
de respuesta es mayor que la de excitacin por lo que se obtuvieron ndices de
Energa superiores a la unidad efecto jaln que implica nuevamente la
contribucin de la aceleracin inercial al movimiento del modelo.
En la figura siguiente, se han graficado los desplazamientos dinmicos modales
para el primer modo de vibracin de cada frecuencia de excitacin utilizada. Los
tres puntos del mismo color representan los desplazamientos dinmicos modales
de las masas.
Respuestas modales de los ensayes para el punto A.
UNIVERSIDAD PRIVADA DEL NORTE
45
Ntese que se presentan diferencias de respuesta del modelo flexible entre una y
otra frecuencia. Lo cual puede ser causado por las condiciones iniciales de
aceleracin en cada una de las masas, en el instante justo antes de comenzar el
desplazamiento relativo.
Como se observa en las historias de aceleracin siguientes, la aceleracin en el
nodo 4 influye en la respuesta del modelo de manera significativa, debido a que
por su posicin, la contribucin de los efectos inerciales puede ser mayor que la
que aportan los dems nodos.
UNIVERSIDAD PRIVADA DEL NORTE
46
Comparacin de aceleraciones (punto A) en el ltimo nodo para el modo 1
Por lo tanto, se corrobora la influencia de la aceleracin de los nodos en la respuesta
dinmica del modelo debido a la variacin en la frecuencia de excitacin y se muestra
tambin que el cambio en la transferencia de energa en la interfaz en el punto A del
movimiento, es debido a la forma del acoplamiento y/o desacoplamiento del movimiento
entre ambas superficies.
Para continuar con el estudio del comportamiento del aislador friccionante, enseguida se
analizar la influencia de la frecuencia de excitacin en el punto B. A continuacin se
presentan las historias de aceleracin, de respuesta y excitacin en la base deslizante
para el modelo flexible estudiado.
UNIVERSIDAD PRIVADA DEL NORTE
47
UNIVERSIDAD PRIVADA DEL NORTE
48
Comparacin de aceleraciones (punto B) en la interfaz para el modo 1
UNIVERSIDAD PRIVADA DEL NORTE
49
Como se pudo apreciar anteriormente, al pasar de la aceleracin inicial al valor de
la aceleracin de fluencia (del punto A al punto B) en las historias de aceleracin,
existe un lapso en donde se incrementan de manera conjunta las aceleraciones de
respuesta y excitacin en la base deslizante, lo que tiende a modificar la magnitud
de la friccin en la interfaz.
Este fenmeno se ha observado anteriormente por Mndez (2009) al cual se le ha
denominado Longitud de transicin del fenmeno. Esta longitud de transicin es
influenciada por la frecuencia de excitacin y la respuesta dinmica del modelo
flexible y representa un intervalo en el cual la friccin esttica en la interfaz cambia
haca la cintica, existiendo una disminucin progresiva en su magnitud (sin
presentarse an la friccin cintica en s, que corresponde al momento en el que
se presentan los desplazamientos relativos). Esa longitud de transicin puede
llegar a controlar (aunque no es el nico factor) la mxima energa para ser
transferida a travs de la interfaz deslizante.
Como se puede ver, en las historias de aceleracin, al incrementar la frecuencia
de excitacin disminuye el tiempo en el cual se pasa del punto A al punto B. Es
decir, la pendiente de la curva aumenta en menos tiempo a incrementos de
frecuencia graduales. Entonces se puede afirmar que la longitud de transicin del
fenmeno depende de la flexibilidad del modelo, de la frecuencia de excitacin y
de la variacin del coeficiente de friccin esttico en la interfaz. Adicionalmente, se
muestran en la figura 5.5 las aceleraciones de excitacin y respuesta para el punto
B, con el fin de observar el acoplamiento del movimiento en la base del modelo.
UNIVERSIDAD PRIVADA DEL NORTE
50
Aceleraciones de excitacin y respuesta del modelo flexible, punto B
Las lneas que unen a las aceleraciones de excitacin y de respuesta tienen pendiente
negativa, lo cual implica que la respuesta es menor que la excitacin (como se vio en los
anlisis del comportamiento del modelo en el punto A) o sea hay disipacin de energa.
Es importante destacar que al llegar a este punto el modelo tiene un comportamiento ms
uniforme en cuanto a la transferencia de energa, es decir, los valores de la aceleracin
de excitacin y de respuesta entre la base del modelo y el plano de deslizamiento son
similares por lo que el IE calculado para este punto es cercano a la unidad en todos los
casos.
UNIVERSIDAD PRIVADA DEL NORTE
51
IE para las frecuencias seleccionadas
En la transicin del fenmeno de friccin, el ndice de energa tiene valores
cercanos a la unidad, significa que el acoplamiento se mantiene hasta el punto B,
sin embargo se debe analizar el efecto que la aceleracin inercial de los nodos
tiene en este punto.
Para el punto B, las aceleraciones en los nodos se incrementan debido a la
interaccin de las fuerzas inerciales generadas por el movimiento, durante la fase
previa de acoplamiento, es decir, al comenzar el deslizamiento (punto A) el
modelo desarrolla una aceleracin semejante a la aceleracin que presenta la
mesa (punto B, graficas 5.5 A a E).
Esto hace que tenga un efecto cintico adicional en su movimiento al presentarse
los desplazamientos relativos entre nodos. Los desplazamientos ms notables se
presentan del tercer nodo al cuarto (que es el ltimo nodo), como se puede
apreciar en la siguiente figura:
UNIVERSIDAD PRIVADA DEL NORTE
52
Primer modo de vibracin calculado para el punto B de las frecuencias seleccionadas.
A diferencia de la respuesta dinmica modal presentada para el punto A, en esta
figura se observa un desfase de la base con respecto al punto cero de referencia,
lo que indica la presencia de desplazamientos relativos.
Respuestas modales de los ensayes para el punto B.
UNIVERSIDAD PRIVADA DEL NORTE
53
En la grfica anterior se observa que los desplazamientos dinmicos modales son
mayores para las frecuencias de 1.33 a 1.36 Hz y de 1.73 a 1.76Hz. Por otro lado,
para la mayor parte de las frecuencias se registraron menores desplazamientos
dinmicos modales. Para los puntos C, C se obtuvieron las historias de
aceleracin asociadas a la variacin de la frecuencia.
F= 1.36 Hz
F= 1.50 Hz
UNIVERSIDAD PRIVADA DEL NORTE
54
F=1.76 Hz
F=1.9 Hz
Comparacin de aceleraciones (punto C y C).
En esta etapa del movimiento, la aceleracin de respuesta en la base del modelo
no alcanza a llegar al nivel de aceleracin del plano de excitacin. Esto nos habla
de un fenmeno de disipacin de energa en la interfaz segundos despus de
presentarse los desplazamientos relativos, lo que sugiere una disminucin del
ndice de energa. Fsicamente, el rea entre las curvas, que representan la
energa cintica de la excitacin que es disipada en la interfaz por medio de la
UNIVERSIDAD PRIVADA DEL NORTE
55
friccin desarrollada al presentarse los desplazamientos relativos. Enseguida se
estudiarn los efectos de la energa que logra ser transmitida al modelo.
Se observa como las grficas tienen pendientes negativas ms pronunciadas que
las obtenidas en el punto B lo que implica diferencias significativas entre las
aceleraciones de excitacin y de respuesta (haciendo referencia a lo observado en
(A a D). Ms adelante se cuantifica el IE para observar el porcentaje de
transmisin de la energa cintica debida a la excitacin sobre la base del modelo.
Aceleraciones de excitacin y respuesta del modelo flexible para el punto C
UNIVERSIDAD PRIVADA DEL NORTE
56
De esta manera, se puede comparar el fenmeno (de forma aproximada) que se
produce cuando se retira instantneamente el mantel de una mesa con la vajilla
encima y esta se queda en el mismo sitio, lo cual puede servir para tener una idea
de las diferencias de aceleracin registradas en la interfaz deslizante. El ndice de
energa calculado para las frecuencias de excitacin mostradas anteriormente, es
el que se presenta en la tabla siguiente:
IE para las frecuencias seleccionadas
Como se pudo apreciar en las historias de aceleracin, el desacoplamiento de
aceleraciones es mucho mayor en este punto que en los anteriores.
Este desacoplamiento indica que parte de la energa de excitacin es disipada en
la interfaz y parte de la energa es absorbida por el amortiguamiento del modelo
reflejndose en una disminucin del IE.
Es necesario observar si la respuesta dinmica del modelo interviene en este
comportamiento. Para ello se estudiaran sus respuestas modales en el primer
modo de vibracin.
UNIVERSIDAD PRIVADA DEL NORTE
57
Primer modo de vibracin calculado para el punto C de las frecuencias seleccionadas.
Es interesante observar que la respuesta es muy parecida para distintas
frecuencias. Los desplazamientos relativos entre los nodos 3 y 4 son los mximos
registrados en todo el ciclo. Alcanzando valores de 3.52, 4.32, 4.91 y 5.32 mm,
para las frecuencias 1.36, 1.5, 1.76 y 1.9 Hz respectivamente.
UNIVERSIDAD PRIVADA DEL NORTE
58
Respuestas modales de los ensayes para el punto C.
En la grfica anterior se observa que las respuestas modales de las masas son mayores
del nodo 3 al 4 y adems la respuesta se incrementa conforme se incrementa la
frecuencia de excitacin. Esto significa que en la primera fase del ciclo de deslizamiento,
en la direccin inicial del movimiento, la aceleracin de respuesta llega a su nivel mximo.
Se observa que este nivel depende de la frecuencia de excitacin (en primera instancia),
ya que la forma de la curva de aceleracin de respuesta se va asemejando a la de
excitacin con el aumento de la frecuencia en este punto. Hay que tomar en cuenta la
distribucin de la masa, las caractersticas del material aislante y la contribucin de los
efectos inerciales en este nivel de aceleracin registrado. Para el punto D tambin se
tomaron lecturas y se analizaron los valores registrados de manera similar a los
puntos anteriores. Es importante observar que a partir del punto C y hasta el punto D
comienza la segunda fase del ciclo de deslizamiento en el que se desacelera el
movimiento del plano de excitacin.
UNIVERSIDAD PRIVADA DEL NORTE
59
F=1.36 Hz
F=1.5 Hz
UNIVERSIDAD PRIVADA DEL NORTE
60
F=1.76 Hz
F=1.9 Hz
Comparacin de aceleraciones (punto D).
UNIVERSIDAD PRIVADA DEL NORTE
61
De las grficas anteriores se puede apreciar que despus de alcanzar la
aceleracin de excitacin y respuesta mximas, hay un descenso en ambos
valores, significa que el plano de excitacin se desacelera ms rpido que la base
del modelo coincidiendo en el punto D, en donde se interceptan.
El rea comprendida entre la curva de aceleracin de respuesta y de excitacin
(entre los puntos B y D) corresponde a la energa de excitacin que es disipada en
la interfaz, por lo cual al llegar al punto D el modelo mantiene parte de la energa
mxima alcanzada en el punto C. De acuerdo a lo observado en las figuras, se
puede visualizar que el IE alcanza valores mayores que la unidad porque la
aceleracin de respuesta en la base del modelo est muy por encima del valor de
la aceleracin de la excitacin debido a que, en este momento, la base de la mesa
se encuentra en un proceso de desaceleracin (porque va a cambiar la direccin
del movimiento), entonces el modelo tiende a mantener por ms tiempo la
aceleracin originada por la componente inercial del movimiento, o sea que el
aporte inercial es significativamente mayor.
El IE calculado para esta etapa se presenta en la siguiente tabla:
IE para las frecuencias seleccionadas
A pesar de que el IE calculado para estas frecuencias es muy similar, se observa
que las aceleraciones de excitacin y respuesta disminuyen con el aumento en la
frecuencia de excitacin. Debe tenerse en cuenta la capacidad que tiene la
estructura para resistir la fuerza de cortante en la base, una vez que se ha llegado
al inicio de los desplazamientos relativos (punto B de la aceleracin registrada) y a
UNIVERSIDAD PRIVADA DEL NORTE
62
partir del momento en el que se inicia la contribucin de los efectos cinticos
inerciales (punto D de aceleraciones registradas) ya que estos puntos son crticos
en la transferencia de energa cintica de excitacin aportada y de energa
cintica inercial desarrollada. En la siguiente figura se observa de manera
esquemtica el registro de aceleraciones de excitacin y respuesta en la base, en
el punto en cuestin.
Aceleraciones de excitacin y respuesta del modelo flexible para el punto D
A pesar de que en la fase anterior de movimiento, parte de la energa de
excitacin se ha disipado en la interfaz, aun as se manifiesta energa cintica
adicional de la base del modelo sobre el plano de excitacin, lo que sugiere la
contribucin de energa cintica de las masas de los nodos al movimiento
resultante en la base del modelo. En la figura 5.10 se han calculado los modos de
vibracin del modelo flexible de 3GDL y se han graficado los desplazamientos
UNIVERSIDAD PRIVADA DEL NORTE
63
relativos de los nodos de las masas, mostrndose un desfasamiento lateral entre
cada figura calculada. Por ejemplo para el caso en el que se induce una
frecuencia de excitacin de 1.36 Hz se tienen los menores desplazamientos
relativos en la interfaz debido a que la aceleracin de respuesta es menor que la
aceleracin de excitacin. Este comportamiento anteriormente se atribuy a la
disipacin de una parte de la energa cintica de excitacin en la interfaz, lo que
propicia un menor desarrollo de movimiento relativo en la interfaz deslizante y por
lo tanto una mayor transferencia de energa cintica que puede generar
movimientos mayores a la superestructura. Por otro lado para el caso en el que se
introdujo una frecuencia de excitacin de 1.9 Hz se tienen los mayores
desplazamientos relativos en la interfaz, las aceleraciones disminuyen
simultneamente por lo que existe una ligera disminucin en el IE.
Primer modo de vibracin calculado para el punto D de las frecuencias seleccionadas.
UNIVERSIDAD PRIVADA DEL NORTE
64
El comportamiento general de las masas para las diversas frecuencias se muestra
enseguida:
Respuestas modales de los ensayes para el punto D.
La respuesta dinmica modal es mucho mayor para las frecuencias intermedias
que para las frecuencias extremas. Finalmente se estudiar el comportamiento del
modelo en el punto E de ciclo. El anlisis de este punto es trascendental en el
aislamiento de la base del modelo. Este punto es el mximo de transferencia de
energa, esto se debe al cambio de direccin de la base de la mesa, ya que el
modelo conserva el efecto inercial en la otra direccin. El IE determinado al llegar
a este punto es el que se presenta enseguida:
UNIVERSIDAD PRIVADA DEL NORTE
65
IE para las frecuencias seleccionadas
El IE determinado es mayor que la unidad. La energa de excitacin es menor que
la de respuesta debido (de nueva cuenta) a la contribucin de la aceleracin
inercial de las masas de los nodos. En este punto el modelo se encuentra en la
fase final del ciclo de deslizamiento, por lo que el acoplamiento del movimiento de
ambas superficies es importante en esta etapa debido a que en ella se presentan
variaciones de desplazamientos relativos y en consecuencia mayores o menores
solicitaciones estructurales.
Aceleraciones de excitacin y respuesta del modelo flexible para el punto E
Las aceleraciones registradas muestran que las aceleraciones de excitacin son
mayores que las de respuesta para la mayora de las frecuencias mostradas en la
figura nicamente y de manera aislada, se tiene que para una frecuencia de
excitacin de 1.36 Hz, la aceleracin de respuesta es mayor que la aceleracin de
UNIVERSIDAD PRIVADA DEL NORTE
66
excitacin. Otro punto importante es el hecho de que para las frecuencias de
excitacin extremas del movimiento, se tienen las mayores diferencias en las
aceleraciones registradas que las obtenidas para frecuencias intermedias. En la
grfica, se observa como la respuesta dinmica modal es prcticamente nula para
las frecuencias de excitacin intermedias y es mucho mayor para las frecuencias
de excitacin extremas.
Esto tiene un significado implcito sobre las propiedades del material de suelo
sobre el que pueda desplantar una estructura real con aislamiento friccionante en
su base. Para menores frecuencias de excitacin se tienen las mayores
diferencias de aceleracin registradas, esto implica que para suelos con mayor
capacidad para transmitir las ondas ssmicas se tendrn menores demandas
estructurales, debido a que la estructura puede entrar ms rpido a la fase de
acoplamiento en la que aumentan los desplazamientos relativos sustancialmente
en la base deslizante y disminuye por lo tanto la contribucin de la energa cintica
inercial de los nodos de las masa.
Respuestas modales de los ensayes para el punto E.
UNIVERSIDAD PRIVADA DEL NORTE
67
8. DISCUSIN
Como resultado de este estudio, se pudo identificar cuatro etapas del movimiento del
modelo flexible de 2 y 3 GDL en los que existe relacin entre la frecuencia de excitacin,
los desplazamientos relativos en la base deslizante y el ndice de Energa calculado,
como se describe enseguida:
1ra etapa, al comienzo del movimiento acoplado:
Se observ que en esta etapa comienza el movimiento acoplado del modelo con respecto
a su base (actuando como una estructura de base fija), es decir, no se manifiestan
desplazamientos relativos para frecuencias menores de 2 Hz., por lo que la condicin de
friccin esttica predomina en la interfaz deslizante. La disipacin de la energa cintica
desarrollada en cada ciclo es asumida por la flexibilidad y rigidez estructural. El modelo
acta como una estructura fija a su base y el ndice de energa tiende a acercarse a la
unidad debido a la nula diferencia de aceleraciones entre la base deslizante y la del
modelo.
2da etapa, al comienzo del movimiento intermitente:
En esta etapa comienza el movimiento relativo en la interfaz de manera irregular. Existe
adems intermitencia en los desplazamientos relativos causados por la transicin del
fenmeno de friccin esttica a cintica (fenmeno stick-slip, Botero) que ocasiona que
se presente variacin del ndice de Energa de manera drstica. De esta forma, se
presentan (sbitamente) desplazamientos relativos en la base, lo que provoca que vare
de manera abrupta el ndice de Energa. En esta etapa la transicin del fenmeno es
crucial, porque ella determina el tiempo de acoplamiento de la aceleracin de respuesta
del modelo con la de excitacin en la base. Mientras mayor sea la longitud de transicin
del fenmeno, la aceleracin de fluencia ser ms grande debido al acoplamiento de
aceleraciones. Hay que distinguir el hecho de que este comportamiento se presenta para
un intervalo de frecuencias corto (de 1, 2, 3 o ms Hz.) dependiendo de las caractersticas
del modelo y del aislador utilizado.
UNIVERSIDAD PRIVADA DEL NORTE
68
3ra etapa, durante la 1ra fase de movimiento relativo:
Al aumentar la frecuencia de excitacin de 2 a 2.5 Hz., aumentan los desplazamientos
relativos y disminuye el ndice de Energa. Esta etapa puede ser perjudicial para la
estructura debido a que las solicitaciones son mucho mayores en el modelo flexible de
base libre, que las que se obtendran para un modelo de base fija. Tmese en cuenta que
adems de las fuerzas inerciales debidas a la masa y al movimiento del modelo, tambin
participan las fuerzas cinticas adicionales, manifestndose en una traslacin ms amplia
de la respuesta dinmica modal del modelo y ocasionando que se presente incremento en
el periodo fundamental de vibracin de la estructura.
4ta etapa, durante la segunda fase de movimiento relativo: En esta etapa se
comienza a tener un comportamiento opuesto al que se mostr en la primera fase de
movimiento relativo, es decir, los desplazamientos relativos disminuyen
considerablemente con el incremento de la frecuencia de excitacin (de 2.5 a 3 Hz.), a su
vez, el ndice de energa tiende a aumentar. Es evidente notar que en esta etapa la
frecuencia toma una importancia singular debido a que la aceleracin resultante en la
interfaz es mayor, lo que conlleva a que se disipe mayor energa cintica en la base y se
transmita menos aceleracin a los nodos. Esta etapa es la que permitira a la estructura
dispar ms energa en la interfaz y disminuir las solicitaciones accidentales
aceptablemente. Las caractersticas ideales que se podran esperar del desarrollo de
aisladores friccionantes es que las superficies en contacto tuvieran la capacidad de entrar
en esta etapa ms rpidamente (con superficies menos speras que limiten la friccin)
disminuyendo as el tiempo de mayor demanda estructural y aumentando la fase en la
que los daos estructurales pueden ser mucho menores.
9. CONCLUSIONES
La interaccin suelo-estructura no es lineal ni constante, y eso influye en la forma y
cantidad de energa que se disipa y en el nivel de dao que se puede llegar a generar en
el edificio.
UNIVERSIDAD PRIVADA DEL NORTE
69
La inercia disipa energa como fue observado en el modelo rgido.
La frecuencia de excitacin influye en la disipacin de energa en la interfaz.
La capacidad de disipacin cambia a lo largo del ciclo de deslizamiento.
En los estudios de interaccin suelo-estructura, se debe tener especial cuidado en
la variacin porcentual de la masa.
El tipo de material utilizado en la interfaz influye de manera directa en la
disipacin de energa y en la longitud de transicin del fenmeno.
Se debe tener en cuenta los efectos cinticos adicionales al movimiento en
modelos de base aislada.
El ndice de energa contabiliza, de manera efectiva, la disipacin de la energa
en la interfaz y a su vez relaciona de manera prctica los desplazamientos
relativos en la interfaz deslizante.
10. REFERENCIAS
Oviedo A. J. y Duque M. del P.Sistemas de Control de Respuesta Ssmica en
Edificaciones. Escuela de Ingeniera de Antioquia, Medelln (Colombia). Diciembre
2006
Universidad de Santiago de Chile. Departamento de Ingeniera en Obras Civiles.
Estudio Comparativo Econmico de Edificios con Aislamiento Ssmico en la Base
Tesis Doctoral: Una nueva ley de friccin cintica para bloques rgidos y su
aplicacin a problemas geossmicos. Dr. Bogart Camille Mndez Orqudez.
Mxico D.F. 2009
Tesis Doctoral: Modelo bidimensional no-lineal para el anlisis del
comportamiento dinmico de estructuras trreas. Dr. Eduardo Botero Jaramillo.
Mxico D.F. 2004
Bozzo R., Luis y Ordez O., Daniel. Disipadores mecnicos de energa. Revista
Bit, marzo 2001. Chile.
UNIVERSIDAD PRIVADA DEL NORTE
70
Você também pode gostar
- 02 Modelos ARMADocumento26 páginas02 Modelos ARMAAlmendraAinda não há avaliações
- Aburto SalirrosasDocumento17 páginasAburto SalirrosasEdgar De La CruzAinda não há avaliações
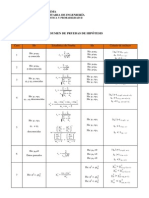
- Formulario de Pruebas de HipotesisDocumento2 páginasFormulario de Pruebas de HipotesisEdgar De La CruzAinda não há avaliações
- A 38 Dias de Las EleccionesDocumento1 páginaA 38 Dias de Las EleccionesEdgar De La CruzAinda não há avaliações
- Trabajo de Aplicacion Estadistica InferencialDocumento20 páginasTrabajo de Aplicacion Estadistica InferencialEdgar De La CruzAinda não há avaliações
- AdrianabacileDocumento13 páginasAdrianabacilexxjoseAinda não há avaliações
- GraficosDocumento5 páginasGraficosEdgar De La CruzAinda não há avaliações
- Biografia de FisherDocumento9 páginasBiografia de FisherAnonymous KrLU31O7Ainda não há avaliações
- Estadistica para HidrologiaDocumento12 páginasEstadistica para HidrologiayhonJL174Ainda não há avaliações
- No LloresDocumento1 páginaNo LloresEdgar De La CruzAinda não há avaliações
- 1esquema TesisDocumento1 página1esquema TesisEdgar De La CruzAinda não há avaliações
- Indice de ContenidosDocumento7 páginasIndice de ContenidosEdgar De La CruzAinda não há avaliações
- Prueba de TukeyDocumento3 páginasPrueba de TukeyEdgar De La Cruz0% (1)
- EviewDocumento16 páginasEviewEdgar De La CruzAinda não há avaliações
- Esquema TesisDocumento3 páginasEsquema TesisEdgar De La CruzAinda não há avaliações
- Diagrama de FlujoDocumento1 páginaDiagrama de FlujoEdgar De La CruzAinda não há avaliações
- Problema 6.5Documento12 páginasProblema 6.5Edgar De La CruzAinda não há avaliações
- El ClimaDocumento6 páginasEl ClimaEdgar De La CruzAinda não há avaliações
- IntroMRLG PDFDocumento14 páginasIntroMRLG PDFAnonymous AGQT03RC7Ainda não há avaliações
- Formula RioDocumento2 páginasFormula RioEdgar De La CruzAinda não há avaliações
- Computación BásicaDocumento11 páginasComputación BásicaEdgar De La CruzAinda não há avaliações
- Geren CIADocumento13 páginasGeren CIAEdgar De La CruzAinda não há avaliações
- Variable Compleja - Hauser (Creo)Documento87 páginasVariable Compleja - Hauser (Creo)EternaOzkuridaAinda não há avaliações
- Teoria ImportanteDocumento6 páginasTeoria ImportanteEdgar De La CruzAinda não há avaliações
- Alpha de CronbachDocumento20 páginasAlpha de CronbachOctavio_oaAinda não há avaliações
- Material InformativoDocumento18 páginasMaterial InformativoEdgar De La CruzAinda não há avaliações
- Andres MogniDocumento73 páginasAndres MogniEdgar De La CruzAinda não há avaliações
- Investigación: Estadística Descriptiva de Los DatosDocumento5 páginasInvestigación: Estadística Descriptiva de Los Datoshuaracha125Ainda não há avaliações
- Excelvbaplication 2010Documento158 páginasExcelvbaplication 2010ferty88Ainda não há avaliações
- ExamenParcial 03Documento10 páginasExamenParcial 03Gean Angeles ChAinda não há avaliações
- Algunas Pruebas de Aldehidos y CetonasDocumento7 páginasAlgunas Pruebas de Aldehidos y CetonasJuan Jose Luna RamosAinda não há avaliações
- Texto-Técnicas de ProgramaciónDocumento273 páginasTexto-Técnicas de ProgramaciónKarla Pedraza100% (2)
- Seminario Munihuamanga Parte PrácticaDocumento11 páginasSeminario Munihuamanga Parte PrácticaCharlyAinda não há avaliações
- Previo 1 de Fisica de OndasDocumento5 páginasPrevio 1 de Fisica de Ondasoscar parkerAinda não há avaliações
- HlaDocumento1 páginaHlaAndy Gianpierre Rojas UrquizaAinda não há avaliações
- Informe 1 Codigo HuffmanDocumento11 páginasInforme 1 Codigo HuffmanMiguel RodriguezAinda não há avaliações
- Lab2 Nuevo-Semana2Documento8 páginasLab2 Nuevo-Semana2AngelaVidalAlvizAinda não há avaliações
- Guía 3 Luz - Flujo Luminoso - Eficiencia Luminosa - Tipos de LámparasDocumento2 páginasGuía 3 Luz - Flujo Luminoso - Eficiencia Luminosa - Tipos de LámparasAlexandra Castro ValenciaAinda não há avaliações
- TI-ST-FO-01 Formato para Requisicion de Acciones Preventivas y CorrectivasDocumento1 páginaTI-ST-FO-01 Formato para Requisicion de Acciones Preventivas y CorrectivasGabriel Rodriguez MagnoAinda não há avaliações
- SD Hoja Guia 5 2020A PDFDocumento2 páginasSD Hoja Guia 5 2020A PDFCris 97Ainda não há avaliações
- Historia NacionalDocumento9 páginasHistoria NacionalFran ArcosAinda não há avaliações
- FluidosDocumento3 páginasFluidosluisAinda não há avaliações
- Actividad Del AguaDocumento11 páginasActividad Del AguaALMA PAULINA BARAJAS CASTAÑEDAAinda não há avaliações
- Tarea 2 EstadisticaDocumento7 páginasTarea 2 Estadisticakevin acuñaAinda não há avaliações
- Biofísica de La Óptica y La VisiónDocumento33 páginasBiofísica de La Óptica y La VisiónMAyra GuzmanAinda não há avaliações
- FICHA-TECNICa Industrias BasicasDocumento2 páginasFICHA-TECNICa Industrias Basicasandres lopez llanoAinda não há avaliações
- MatricesDocumento4 páginasMatricesMARIA KASSANDRA CORDOBA HERNANDEZAinda não há avaliações
- TG - 01 Centro de AcopioDocumento2 páginasTG - 01 Centro de AcopioSaki Llenque MolinaAinda não há avaliações
- Marco TeóricoDocumento6 páginasMarco TeóricoYasmany AguilarAinda não há avaliações
- Elaboracion de Nectar de CopoazuDocumento7 páginasElaboracion de Nectar de CopoazuJaime100% (1)
- Fase 4 Cuarto Grado Aprendizajes Fundamentales 23-24Documento4 páginasFase 4 Cuarto Grado Aprendizajes Fundamentales 23-24Edith MendozaAinda não há avaliações
- Matemáticas IIDocumento15 páginasMatemáticas IIerico_rAinda não há avaliações
- p8 - EvaporadoresDocumento18 páginasp8 - EvaporadoresCintya Yanet SAAinda não há avaliações
- 8EGBDocumento61 páginas8EGBjesica paltan100% (1)
- Trabajo de Estadistica Ii E1 Resuelto NuevoDocumento6 páginasTrabajo de Estadistica Ii E1 Resuelto NuevoAuxiliar SSTAinda não há avaliações
- Dosificacion de Mezclas AciDocumento18 páginasDosificacion de Mezclas AcilizandroAinda não há avaliações
- Reseña EpidemiologiaDocumento17 páginasReseña EpidemiologiaalexbrownguitarAinda não há avaliações
- 9.2.2.7 Packet Tracer - Configuring Multiarea OSPFv3 InstructionsDocumento2 páginas9.2.2.7 Packet Tracer - Configuring Multiarea OSPFv3 InstructionsameliaAinda não há avaliações
- Informe de Nivelacion de TierrasDocumento5 páginasInforme de Nivelacion de TierrasTrovackAinda não há avaliações