Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Adjustable Power Supply Module DimensionsDocumento1 páginaAdjustable Power Supply Module DimensionsArie SorayaAinda não há avaliações
- Setup Preboot HP Probook 4440sDocumento9 páginasSetup Preboot HP Probook 4440sJose Luis MarcosAinda não há avaliações
- ROM Image Remarks Previous (Yymmdd) : IOT032000.bin CH-Fin V4.18.0.binDocumento10 páginasROM Image Remarks Previous (Yymmdd) : IOT032000.bin CH-Fin V4.18.0.binPhú LêAinda não há avaliações
- Dell Precision Rack 7910 Spec SheetDocumento2 páginasDell Precision Rack 7910 Spec SheetJorge HurtadoAinda não há avaliações
- What I Need To Know?: 1.2-1 and Find Out How Much You CanDocumento4 páginasWhat I Need To Know?: 1.2-1 and Find Out How Much You CanGREGORIO ALVAREZAinda não há avaliações
- Dye Sublimation PrinterDocumento5 páginasDye Sublimation PrinterPaula ZorziAinda não há avaliações
- EECS 2021.03: Computer Organization Exam - SampleDocumento5 páginasEECS 2021.03: Computer Organization Exam - SampleRoman KovalchykAinda não há avaliações
- Fenris Debug-0Documento25 páginasFenris Debug-0JRCAinda não há avaliações
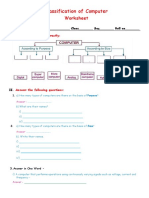
- Classification of Computer WorksheetDocumento3 páginasClassification of Computer Worksheetge5100% (1)
- Module 1 Concepts of ICT Chapter 2 HardwareDocumento23 páginasModule 1 Concepts of ICT Chapter 2 HardwareSenan AlkaabyAinda não há avaliações
- Manual PCA1 PDFDocumento177 páginasManual PCA1 PDFFrancisco Javier Sierra TrujilloAinda não há avaliações
- Kalinga University Department of Computer ScienceDocumento29 páginasKalinga University Department of Computer SciencevivekkumarsAinda não há avaliações
- 21bec2339 VL2022230500857 DaDocumento9 páginas21bec2339 VL2022230500857 DaNiladri DasAinda não há avaliações
- Circuito SAMSUNG R430Documento51 páginasCircuito SAMSUNG R430Junior VituriAinda não há avaliações
- MP 2554SP 3054 3054SP 3354 3354SPDocumento4 páginasMP 2554SP 3054 3054SP 3354 3354SPJimit ShahAinda não há avaliações
- Laguna State Polytechnic University: Republic of The Philippines Province of LagunaDocumento10 páginasLaguna State Polytechnic University: Republic of The Philippines Province of LagunaBerald Catalan Dela CruzAinda não há avaliações
- Manual Board 945GCT-M (2.0A)Documento48 páginasManual Board 945GCT-M (2.0A)BalrogJoelAinda não há avaliações
- 8086 LAB MAX NUMBERDocumento2 páginas8086 LAB MAX NUMBERKoush RastogiAinda não há avaliações
- CDocumento75 páginasCالباب العالي100% (1)
- TEES AND PRINTS ENTERPRISE CONTACT AND PRICELISTDocumento6 páginasTEES AND PRINTS ENTERPRISE CONTACT AND PRICELISTRoel Antonio PascualAinda não há avaliações
- CIT 3150 Computer Systems ArchitectureDocumento3 páginasCIT 3150 Computer Systems ArchitectureMatheen TabidAinda não há avaliações
- Debug 1214Documento20 páginasDebug 1214Arlun VtecAinda não há avaliações
- Ami DosDocumento8 páginasAmi DosAlexander RivasAinda não há avaliações
- 8086 Memory Organization PDFDocumento6 páginas8086 Memory Organization PDFAshok ChakriAinda não há avaliações
- Preparing Drawing Using Computer-Aided Design (Cad)Documento32 páginasPreparing Drawing Using Computer-Aided Design (Cad)Mary Jane Blanco FioAinda não há avaliações
- HP 500BDocumento4 páginasHP 500Bproteor_srlAinda não há avaliações
- Mini Pro Support List TL866 CSDocumento128 páginasMini Pro Support List TL866 CSLuis Luis GarciaAinda não há avaliações
- Cs604 Final Term Solved MCQs With ReferenceDocumento16 páginasCs604 Final Term Solved MCQs With Referenceaiman razzaqAinda não há avaliações
- JS1 Computer Studies ExaminationDocumento2 páginasJS1 Computer Studies ExaminationEjiro Ndifereke100% (1)
- Demo-Oral QuestioningDocumento4 páginasDemo-Oral QuestioningJunz A. AducalAinda não há avaliações